Расширение функционала опроса аналоговых датчиков в системах управления ООО «Вега-ГАЗ» для топливно-энергетического комплекса

Автор: М.В. Алексеев, И.А. Хаустов, В.С. Кудряшов, А.В. Иванов, И.А. Козенко, М.Б. Кузьмичев
Журнал: Вестник Воронежского государственного университета инженерных технологий @vestnik-vsuet
Рубрика: Химическая технология
Статья в выпуске: 3 (89), 2021 года.
Бесплатный доступ
По заданию ООО «Вега-ГАЗ» сформулирована тема исследований по разработке функционального блока обработки типовых аналоговых датчиков с различными трансмиттерами. Блок должен обеспечить ввод первичных данных, предусматривать возможность вывода канала в состояние «Ремонт» и «Симуляция», а также обеспечивать проверку корректности величины входного сигнала. В ходе выполнения исследований проведен анализ технических характеристик приборов, применяемых в системах управления ООО «Вега-ГАЗ». Изучена и освоена настройка электронного модуля ИПН, преобразовательного модуля ИПМ 0399/М0, преобразователя сигналов напряжения MACX MCR и программируемого логического контроллера REGUL R200. В рамках сформулированных в задании функций блока установлен состав задач по обработке сигналов. Требуется выполнить инициализацию аналоговых входов, задание уставок для каждого входа, проверку наличия сигнала на входе, сравнение значений аналоговых сигналов с уставками и дополнительную обработку аналоговых сигналов (фильтрация, линеаризация и т.д.). Предложен универсальный алгоритм работы блока для различных сигналов. Составлено описание функций и программа на языке ST в SCADA-комплексе «СОНАТА» на примере блока обработки аналоговых сигналов от датчиков температуры за турбиной низкого давления от преобразователя ИПН «Вега-ГАЗ». Выполнена отладка разработанного блока для его внедрения в прикладное программное обеспечение ООО «Вега-ГАЗ»
Датчики, трансмиттеры, преобразователи сигналов, логические контроллеры, SCADA-комплекс, программирование
Короткий адрес: https://sciup.org/140259881
IDR: 140259881 | УДК: 681.518.3 | DOI: 10.20914/2310-1202-2021-3-198-206
Expansion of the functionality of interrogating analog sensors in the control systems of LLC «Vega-GAZ» for the fuel and energy complex
On the instructions of LLC «Vega-GAZ», a research topic was formulated for the development of a functional block for processing typical analog sensors with various transmitters. The block must provide input of primary data, provide for the possibility of outputting the channel to the «Repair» and «Simulation» states, and also provide verification of the correctness of the input signal value. In the course of the research, the analysis of the technical characteristics of the devices used in the control systems of LLC «Vega-GAZ» was carried out. The setting of the electronic module VTM, the converter module MTM 0399/М0, the voltage signal converter MACX MCR and the programmable logic controller REGUL R200 has been studied and mastered. Within the framework of the block functions formulated in the task, the set of tasks for signal processing is established. It is required to initialize the analog inputs, set the setpoints for each input, check the presence of a signal at the input, compare the values of the analog signals with the setpoints, and additional processing of the analog signals (filtering, linearization, etc.). A universal algorithm for the operation of the block for various signals is proposed. A description of functions and a program in ST language in the SCADA-complex «SONATA» have been compiled using the example of a block for processing analog signals from temperature sensors downstream of a low-pressure turbine from a MTM «Vega-GAZ» converter. The developed block was debugged for its implementation in the application software of LLC «Vega-GAZ»
Текст научной статьи Расширение функционала опроса аналоговых датчиков в системах управления ООО «Вега-ГАЗ» для топливно-энергетического комплекса
По заданию ООО «Вега-ГАЗ» (г. Москва) сформулирована тема исследований «Разработка функционального блока обработки типовых аналоговых датчиков с различными трансмиттерами» для расширения функционала опроса датчиков технологических параметров в системах управления.
Основным направлением деятельности ООО «Вега-ГАЗ» является разработка, проектирование и внедрение комплексных систем автоматизации для предприятий топливноэнергетического комплекса, их техническое сопровождение и подготовка эксплуатационного персонала. Около 90-95 % выпускаемых ООО «Вега-ГАЗ» систем автоматизации реализуется для нужд предприятий Группы Газпром.
Компания выпускает системы автоматического управления (САУ) для газоперекачивающих агрегатов компрессорных станций магистральных газопроводов и газотурбинных электростанций, обеспечивающих контроль технологических параметров, состояния исполнительных механизмов, а также регулирование и защиту на всех режимах работы (рисунки 1, 2) [1].

Рисунок 1. Блок управления САУ, размещаемый около агрегатов
Figure 1. ACS control unit located near the units

Рисунок 2. Автоматизированное рабочее место инженера в помещении цеха
Figure 2. Automated workstation of an engineer in the workshop room
При разработке комплексных систем автоматизации одной из основных задач является сбор, обработка входной информации и оперативная диагностика измерительных каналов.
Целью исследований является разработка и внедрение функционального блока обработки различных аналоговых и цифровых сигналов с возможностью изменения величины сигналов от внешних функциональных блоков [2].
Функциональный блок обработки аналоговых сигналов должен выполнять следующие функции:
-
1) Ввод первичных данных. При первичном выполнении прикладного программного обеспечения (ПО) программируемого логического контроллера (ПЛК) в функциональный блок должны быть внесены данные о канале. После выполнения первичной программы должна быть предусмотрена возможность изменения данных о канале. При изменении данных канала должна быть фиксация события в прикладном ПО ПЛК.
-
2) Состояние канала «Ремонт». Предусмотреть возможность вывода канала в режим «Ремонт». Режим «Ремонт» должен быть ограничен временной уставкой с возможностью её изменения. При выводе канала в режим «Ремонт» должно быть создано событие с временной меткой и значением в прикладном ПО ПЛК.
-
3) Состояние канала «Симуляция». Предусмотреть возможность вывода канала в режим «Симуляция». При первичном выводе канала необходимо сохранить текущую величину канала. Заблокировать изменение канала от входного сигнала в функциональный блок обработки. Предоставить возможность внесения изменений в выходной сигнал функционального блока из других прикладных программ ПЛК. При выводе канала в режим «Симуляция» должно быть создано событие с временной меткой в прикладном ПО ПЛК.
-
4) Вывод канала в неисправность. При величинах входного сигнала, выходящего за диапазон указанный при первичном выполнении прикладного ПО, необходимо формировать предупреждение о неисправности входного сигнала с указанием причины неисправности. При формировании неисправности канала должно быть создано событие с временной меткой в прикладном ПО ПЛК.
-
5) Вывод канала в неисправность по превышению скорости изменения входного сигнала. При выполнении обработки функциональным блоком входного сигнала должна проводиться проверка корректности текущей
величины входного сигнала относительно предыдущей величины. При превышении дельты входного сигнала относительно уставки, необходимо формировать неисправность канала с указанием причины и величины, с которой происходило изменение сигнала. Предусмотреть возможность отключения данной неисправности в зависимости от параметра при первичном выполнении прикладной программы ПЛК.
Результаты
В работе приводятся результаты выполнения исследований, включающие: анализ технических характеристик приборов и средств автоматизации, применяемых в системах управления ООО «Вега-ГАЗ»; сформулированные задачи обработки сигналов и предложенный алгоритм работы функционального блока; описание разработанного и протестированного блока обработки аналоговых и цифровых сигналов [2].
В ООО «Вега-ГАЗ» в автоматизированных системах управления (АСУ) газоперекачивающими агрегатами (ГПА) применяются датчики с несколькими типами унифицированных сигналов (токовые – 0-5, 4-20 мА и др.). Программируемые логические контроллеры (ПЛК), например, REGUL R200, в системах управления настраиваются для работы с сигналами 0-10 В.
Для этого используются преобразователи сигналов (ИПН, ИПМ 0399/М0 и др.) [3]. Далее преобразованные сигналы поступают на обработку в ПЛК при помощи SCADA– комплекса «СОНАТА».
ИПН – модуль электронный для систем автоматического управления (рисунок 3).
Аналоговые сигналы, поступающие на вход модулей, преобразуются по пропорциональной (линейной) характеристике в унифицированный выходной сигнал напряжения постоянного тока, гальванически разделенный от входных сигналов и цепей питания.
ИПМ 0399/М0 – измерительный преобразовательный модуль (рисунок 4).
ИПМ 0399/М0 предназначен для преобразования сигналов от датчиков температуры (ТС, ТП) и преобразователей с унифицированным выходным сигналом в токовые сигналы 0...5 или 4...20 мА.
MACX MCR – измерительный преобразователь сигналов напряжения (рисунок 5).
MACX MCR предназначен для преобразования постоянного напряжения от 0 (+/-) 20 В DC до 0.. .(+/-) 660 В DC, выходной сигнал (+/-) 10 В / (+/-) 20 мА.
REGUL R200 – программируемый логический контроллер (рисунок 6).

Рисунок 3. Электронный модуль ИПН
Figure 3. Electronic module VTM

Рисунок 4. Преобразовательный модуль ИПМ 0399/М0
Figure 4. Converter module MTM 0399/М0


Рисунок 6. ПЛК REGUL R200
Figure 6. PLC REGUL R200
Рисунок 5. Преобразователь сигналов напряжения
MACX MCR
-
Figure 5. Voltage signal converter MACX MCR
Контроллер REGUL R200 предназначен для построения локальных и распределенных АСУ. Также может использоваться в качестве удаленных станций ввода/вывода в составе контроллеров REGUL R600/R500/R400.
В рамках сформулированных функций блока обработки сигналов в задании установлены следующие задачи:
-
1) инициализация аналоговых входов;
-
2) задание уставок для каждого входа;
-
3) проверка наличия сигнала на входе;
-
4) сравнение значений аналоговых сигналов с уставками;
-
5) дополнительная обработка аналоговых сигналов (фильтрация, линеаризация и т.д.).
Предлагается универсальный алгоритм обработки аналоговых сигналов (рисунок 7).
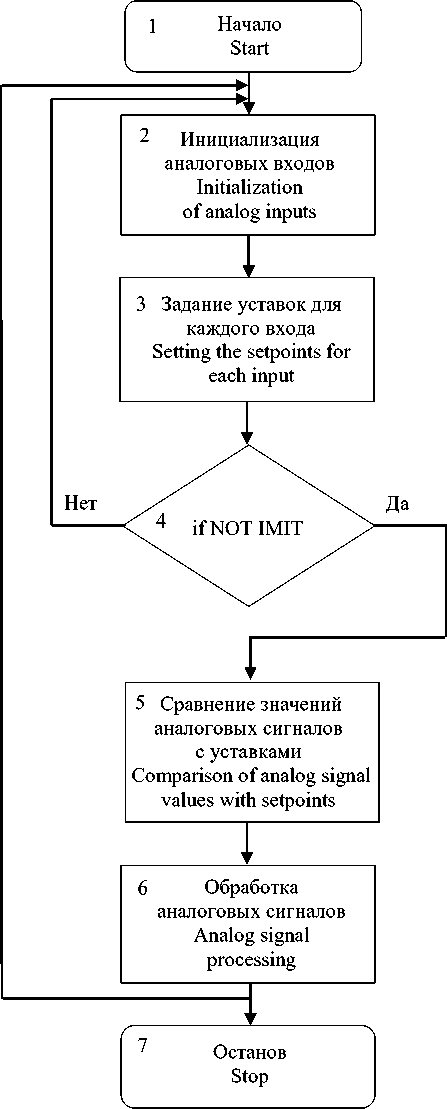
Рисунок 7. Схема алгоритма обработки сигналов
Figure 7. Signal processing algorithm diagram
Обвязка аналоговых входов, задание уставок
Binding of analog inputs, setting of setpoints
Проверка наличия сигнала на имитаторе
Checking the presence of a signal on the simulator
Дополнительная обработка сигналов, если это необходимо Additional signal processing, if necessary
Переход на этап расчёта и выдачи управляющих воздействий Transition to the stage of calculating and issuing control actions
В качестве среды программирования использовался SCADA-комплекс «СОНАТА» [4-6]. Используемый язык программирования –
ST [7-16].
Разработана программа на примере блока обработки аналоговых сигналов от датчиков температуры (термопара) за турбиной низкого давления (ТНД) от преобразователя ИПН «Вега-ГАЗ».
В начале блока обработки аналоговых сигналов производится настройка сигналов, где через переменную (AI_40) вызывается обработчик (массив данных), которому присваиваются имена переменных всех необходимых аналоговых сигналов (LO_SC - нижний предел диапазона измерения, HI_SC – верхний предел диапазона и т.д.). Обработчик является дополнительным функциональным блоком, в котором прописаны определенные правила обработки сигналов.
Далее каждой переменой массива присваиваются определенные значения (уставки), с которыми будут сравниваться сигналы с аналоговых входов.
Далее происходит обработка сигнала из драйвера. Система проверяет есть ли сигнал на имитаторе, который является математической моделью объекта автоматизации и служит для стендовой отладки объекта, и при его отсутствии, производится расчёт сопротивления с помощью интерполяционного уравнения для вычисления в диапазоне от 0 В до 10 В.
При наличии сигнала на имитаторе, переменной (R) присваивается значение с имитатора. Если сигнал возвращает ошибку или не выдает числовое значение, то переменной (R) присваивается 0.
Существует три вида ошибок: превышение верхнего значения диапазона; превышение нижнего предела (обрыв датчика); ROC – по скорости изменения значения при резком изменении сигнала в верхнюю или нижнюю сторону (темповый контроль).
Далее идет контроль сигнала по скорости изменения. Если скорость изменения значения сигнала (Spd) не равна 0 (REAL#0.0) или отсутствует сигнал с имитатора, то происходит расчёт средней скорости изменения на основании четырех сигналов.
Если значение средней скорости (MID) больше максимального значения (MAX), тогда максимальному значению скорости присваива-
в противном случае – 0.
Далее производится расчёт включе-ния/отключения таймеров. Переменные (tof) и (ton) вызывают соответствующие функциональные блоки таймеров.
Таймер на выключение вызывается со следующими параметрами. Если входное значение (AI_IN) больше или равно верхнему значению порога сигнала (POR_HI), или входное значение (AI_IN) меньше или равно нижнему значению порога сигнала (POR_HI), или есть изменение сигнала скорости потока (Spd_FL) и т.д., и нет сигнала с имитатора (NOTIMIT) или блокировки сигнала (Block), то таймер подает сигнал на отключение на выход (Q) в течение двух секунд.
Аналогичным образом работает таймер на включение (ton).
Заключение
В ходе разработки и внедрения блока обработки сигналов от датчиков проведен анализ технических характеристик приборов, применяемых в системах управления ООО «Вега-ГАЗ». В рамках сформулированных в задании функций блока установлен состав задач по обработке сигналов и предложен универсальный алгоритм работы блока для различных сигналов. Составлено описание функций и программа на примере блока обработки аналоговых сигналов от датчиков температуры за ТНД от преобразователя ИПН «Вега-ГАЗ». Выполнена отладка разработанного блока для его внедрения в прикладное ПО ООО «Вега-ГАЗ».
Авторы признательны заместителю генерального директора ООО «Вега-ГАЗ», Старцеву Игорю Вячеславовичу, и другим сотрудникам за оказание помощи в организации стажировки студентов и проведении исследований с использованием оборудования и средств автоматизации в отделе испытаний, а также рассчитывают на дальнейшее сотрудничество по научной работе, учебному процессу и трудоустройству выпускников.
Листинг программы
//Настройка аналоговых сигналов блока обработки, где через //переменную AI_40 вызывается обработчик, которому //присваиваются имена переменных всех необходимых сигналов //и первоначальные значения (уставки)
AI_40(AI[040],HI_SC[040],LO_SC[040],R_AI[040],ON_IMIT,Show[040],Block[040],U1_HI[040],T1_HI[040],U1_LO[0 40],T1_LO[040],HYS1[040],U2_HI[040],T2_HI[040],U2_LO[040],T2_LO[040],HYS2[040],ALW_ON,SPD[040],SLOT_1 _Ok,POR_HI[040],POR_LO[040],TSCAN1,R_AI[040],FAUL[040],LOCAL_040[0],LOCAL_040[1],LOCAL_040[2],LOCAL_0 40[3],LOCAL_040[4],LOCAL_040[5],LOCAL_040[6],LOCAL_040[7]);
HI_U1[040] := LOCAL_040[0] and BHI_U1[040];
LO_U1[040] := LOCAL_040[1] and BLO_U1[040];
HI_T_U1[040] := LOCAL_040[2] and BHI_T_U1[040];
LO_T_U1[040] := LOCAL_040[3] and BLO_T_U1[040];
HI_U2[040] := LOCAL_040[4] and BHI_U2[040];
LO_U2[040] := LOCAL_040[5] and BLO_U2[040];
HI_T_U2[040] := LOCAL_040[6] and BHI_T_U2[040];
LO_T_U2[040] := LOCAL_040[7] and BLO_T_U2[040];
//Ниже прописаны уставки по каждому аналоговому входу
HI_SC[040]:=1000.000; //Резерв Масштаб верхий
LO_SC[040]:=-50.000; //Резерв Масштаб нижний
Show[040]:=BOOL#0; //Резерв Показывать значение если отказ
Block[040]:=BOOL#0; //Резерв Блокировка канала
U1_HI[040]:=536.000; //Резерв Уставка ПС верхняя
T1_HI[040]:=INT#0; //Резерв Задержка уставки ПС верхней
U1_LO[040]:=0.000; //Резерв Уставка ПС нижняя
T1_LO[040]:=INT#0; //Резерв Задержка уставки ПСнижней
HYS1[040]:=0.000; //Резерв Гистерезис уставки ПС
U2_HI[040]:=547.000; //Резерв Уставка АС верхняя
T2_HI[040]:=INT#0; //Резерв Задержка уставки АС верхней
U2_LO[040]:=0.000; //Резерв Уставка АС нижняя
T2_LO[040]:=INT#0; //Резерв Задержка уставки АС нижней
HYS2[040]:=0.000; //Резерв Гистерезис уставки АС
SPD[040]:=600.000; //Резерв Скорость нарастания
POR_HI[040]:=9.99; //Резерв Верхний порог сигнала
POR_LO[040]:=1.9; //Резерв Нижний порог сигнала
BHI_U1[040]:=BOOL#1; //Резерв Задействовать ПС верхняя прямая
BLO_U1[040]:=BOOL#0; //Резерв Задействовать ПС нижняя прямая
BHI_T_U1[040]:=BOOL#0; //Резерв Задействовать ПС верхняя задержанная
BLO_T_U1[040]:=BOOL#0; //Резерв Задействовать ПС нижняя задержанная
BHI_U2[040]:=BOOL#1; //Резерв Задействовать АС верхняя прямая
BLO_U2[040]:=BOOL#0; //Резерв Задействовать АС нижняя прямая
BHI_T_U2[040]:=BOOL#0; //Резерв Задействовать АС верхняя задержанная
BLO_T_U2[040]:=BOOL#0; //Резерв Задействовать АС нижняя задержанная
//Обработка сигнала из драйвера
ALW_OFF := BO
OL#0;
if NOT IMIT then// Проверка наличия сигнала на имитаторе
R := (((HI_SC - LO_SC) * AI_IN) / REAL#10 ) + LO_SC;
//Рассчитывается переменная R для диапазона от 2.0 В до 10.0 В из драйвера else
R := R_IMIT;
end_if;
if F and NOT Sh_Data then R := REAL#0.0; end_if;
//Блок расчёта ошибок: по превышению верхнего предела диапазона;
//по превышению нижнего предела (обрыв датчика);
//по скорости изменения.
//Контроль сигнала по скорости изменения
//Если задан 0, то не проверяем ifSpd<>REAL#0.0 orNOTIMITthen //можно Spd объявить как INT
AI_Speed_BUF[1] := AI_Speed_BUF[0];
AI_Speed_BUF[2] := AI_Speed_BUF[1];
AI_Speed_BUF[3] := AI_Speed_BUF[2];
AI_Speed_BUF[0] := AI_IN;
//Расчёт средней скорости изменения на основании четырех сигналов
MID := (ABS(AI_Speed_BUF[0] - AI_Speed_BUF[2]) + ABS(AI_Speed_BUF[1] - AI_Speed_BUF[3])) / T_SCN;
if MID > MAX then MAX := MID; end_if;
if MID >Spd then Spd_FL := BOOL#1;
else Spd_FL := BOOL#0; end_if;
end_if;
//Расчёт отключения таймера на 2 с (в зависимости от наличия и
//отсутствия сигналов на входах)
tof_F(IN:= ((((AI_IN >= POR_HI) or (AI_IN <= POR_LO) or (Spd_FL and ALW_OFF) or NOT AI_FL or FL_SL) and NOT IMIT) or Block), PT:=T#2000ms, Q => F);
if NOT F and (R > U1_HI) then HI_U1 := BOOL#1; else HI_U1 := BOOL#0; end_if;
if NOT F and (R < U1_LO) then LO_U1 := BOOL#1; else LO_U1 := BOOL#0; end_if;
//Расчёт включения таймера на 1 с (в зависимости от наличия и
//отсутствия сигналов на входах)
ton_HI_T_U1(IN:=HI_U1, PT:=(T#1000ms * T1_HI));
if ton_HI_T_U1.Q and NOT F then HI_T_U1 := BOOL#1; end_if;
if HI_T_U1 and (R <= (U1_HI - HYS1)) and NOT F then HI_T_U1 := BOOL#0; end_if;
ton_LO_T_U1(IN:= LO_U1, PT:=(T#1000ms * T1_LO));
if ton_LO_T_U1.Q and NOT F then LO_T_U1 := BOOL#1; end_if;
if LO_T_U1 and (R > (U1_LO - HYS1)) and NOT F then LO_T_U1 := BOOL#0; end_if;
//Сравнение сигналов на входах для включения/откл. таймеров if NOT F and R > U2_HI then HI_U2 := BOOL#1; else HI_U2 := BOOL#0; end_if;
if NOT F and R <= U2_LO then LO_U2 := BOOL#1; else LO_U2 := BOOL#0; end_if;
ton_HI_T_U2(IN:= HI_U2, PT:=(T#1000ms * T2_HI));
if ton_HI_T_U2.Q and NOT F then HI_T_U2 := BOOL#1; end_if;
if HI_T_U2 and (R <= (U2_HI - HYS2)) and NOT F then HI_T_U2 := BOOL#0; end_if;
ton_LO_T_U2(IN:= LO_U2, PT:=(T#1000ms * T2_LO));
if ton_LO_T_U2.Q and NOT F then LO_T_U2 := BOOL#1; end_if;
if LO_T_U2 and (R > (U2_LO - HYS2)) and NOT F then LO_T_U2 := BOOL#0; end_if;
if F then HI_T_U1 := BOOL#0;
HI_T_U2 := BOOL#0;
LO_T_U1 := BOOL#0;
LO_T_U2 := BOOL#0;
end_if;
Список литературы Расширение функционала опроса аналоговых датчиков в системах управления ООО «Вега-ГАЗ» для топливно-энергетического комплекса
- Сайт ООО «Вега-ГАЗ». URL: http://www.vega-gaz.ru/about 1
- Алексеев М.В. Разработка функционального блока обработки типовых аналоговых датчиков с различными 2трансмиттерами: отчет по НИОКР. Воронеж, 2021. 23 с.
- Системы автоматического управления для топливно-энергетического комплекса (каталог продукции). М., 3ООО «Вега-ГАЗ», 2021. 48 с.
- SCADA система «Соната». Руководства и средства разработки. URL: https://sonata.ezan.ac.ru 4
- Ищенко А.Н. Облачный SCADA комплекс DispSky // Автоматизация в промышленности. 2020. №. 1. С. 57-59. 5
- Лапаева О.Ф., Иневатова О.А., Дедеева С.А. Современные проблемы и перспективы развития топливно-6энергетического комплекса // Экономические отношения. 2019. Т. 9. №. 3. С. 2129-2142.
- Ходычкин А.Ю., Зоря Е.И., Назаров В.П. Об использовании сервиса ЦОД в информационных системах 7топливно-энергетического комплекса (часть 1) // Автоматизация, телемеханизация и связь в нефтяной промышленности. 2013. №. 12. С. 17-27.
- Третьяков А.А., Елизаров И.А., Назаров В.Н. Средства автоматизации управления: системы программирования 8контроллеров. Тамбов: ТГТУ, 2017. 82 с. URL: https://biblioclub.ru/index.php?page=book&id=499053 Zatsarinnaya Y., Logacheva A., Suslov K. Outlook on the Development of Smart Energy Systems // 2020 9International Ural Conference on Electrical Power Engineering (UralCon). IEEE, 2020. P. 19-23. doi: 10.1109/UralCon49858.2020.9216266
- Dolotovskii I.V., Dolotovskaya N.V., Larin E.A. Software and Dataware for Energy Generation and Consumption Analysis 10System of Gas Processing Enterprises // Journal of Physics: Conference Series. IOP Publishing, 2018. V. 1015. №. 4. P. 042010.
- Cepeda J.C., Rivera G., Farinango L. Improving the Computer Aided Power System Operation in Ecuador: 11Enhancements to SCADA/EMS // 2015 Asia-Pacific Conference on Computer Aided System Engineering. IEEE, 2015. P. 78-83. doi: 10.1109/APCASE.2015.21 Kamel K., Kamel E. Programmable logic controllers: Industrial control. McGraw Hill Professional, 2013. 432 p. 12
- Bolton W. Programmable logic controllers. Newnes, 2015. 412 p. 13
- Wcislik M., Suchenia K., Łaskawski M. Programming of sequential control systems using functional block diagram 14language // IFAC-PapersOnLine. 2015. V. 48. № 4. P. 330-335.
- Barkalov A., Titarenko L., Mazurkiewicz M. Programmable logic controllers // Foundations of Embedded Systems. 15Springer, Cham, 2019. P. 145-162.
- Кудряшов В.С., Иванов А.В., Алексеев М.В. и др. Настройка и программирование цифровых систем 16управления с использованием контроллеров, панелей оператора и частотных преобразователей (теория и практика). Воронеж: ВГУИТ, 2020. 215 с.
- Kryukov O.V. Automation of gas transmission units // Russian Internet Journal of Industrial Engineering. 2016. 17V. 4. №. 1. P. 36-41.
- Khasaev G.R., Tsybatov V.A. Tooling of modeling and strategic planning of energy-efficient development of the 18regional fuel and energy complex // Eurasian Journal of Analytical Chemistry. 2017. V. 12. №. 7. P. 1169-1182. doi: 10.12973/ejac.2017.00242a
- Puzyrny N., Petrova Z., Povorina A., Volkova E. et al. Impact of digital transformation and innovation on the 19development of the fuel and energy complex // IOP Conference Series: Earth and Environmental Science. IOP Publishing, 2021. V. 808. №. 1. P. 012027.
- Kuznetsova N.V., Kuznetsova E.V. Challenges of Russian fuel and energy complex // Mediterranean Journal of 20Social Sciences. 2015. V. 6. №. 5. P. 112. doi: 10.5901/mjss.2015.v6n5p112
