Расширение технологических возможностей станка-робота за счет обеспечения других видов обработки

Автор: Сайдуганов С.Р.
Журнал: Теория и практика современной науки @modern-j
Рубрика: Основной раздел
Статья в выпуске: 7 (49), 2019 года.
Бесплатный доступ
Приведен общий вид станка-робота, а также указаны основные преимущества и недостатки данной компоновки. Рассмотрена принципиальная возможность ведения других видов обработки на станке-роботе. Более подробно рассмотрен узел станка подверженный изменению в ходе обеспечения другого вида обработки. Возможны такие виды обработок как, лазерная обработка, сварка (трением с перемешиванием, в том числе), электроэрозионная обработка, шлифование и т.д.
Станок-робот, виды обработок, параллельная кинематика, расширение технологических возможностей
Короткий адрес: https://sciup.org/140274832
IDR: 140274832 | УДК: 621.8-1
Expansion of the technological capabilities of the machine-robot by providing other types of processing
A general view of the robot machine is given, and the main advantages and disadvantages of this layout are indicated. Considered the fundamental possibility of doing other types of processing on the machine-robot. In more detail, a machine node is subject to change during the provision of another type of treatment. There are such types of treatments as laser processing, welding (friction with mixing, including), electroerosive processing, grinding, etc.
Текст научной статьи Расширение технологических возможностей станка-робота за счет обеспечения других видов обработки
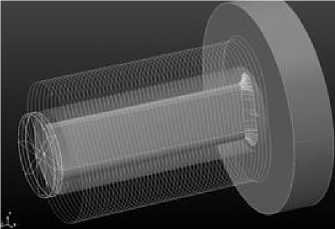
Введение. Разработчики станков в области структур (компоновок) с параллельной кинематикой решают вопрос по комбинированию высокой гибкости и большой рабочей зоны станков-роботов с точностью и жесткостью классических станков. За последний период времени внимание также уделялось разработкам станков с параллельной кинематикой так называемый МПС (механизмы с параллельной структурой). Эта технология означает, что движения по координатам X, Y и Z выполняются тремя или большим количеством параллельных осей, которые дают отличную жесткость и точность с сохранением оптимальной гибкости и охватом рабочей зоны станка-работа. Станок, который фактически реализовал данную технологию, станок-робот разработанный на кафедре «Автоматизация технологических процессов» (УГАТУ) представлен на рисунке 1.
Актуальностью и новизной данной научной работы является рассмотрение вариантов расширения технологических возможностей станка-робота за счет обеспечения других видов обработки.

Рисунок 1 – Общий вид станка станка-робота для высокоскоростной обработки.
Целью работы является предложение нескольких технологических видов обработки внеся в конструкцию станка-робота незначительные изменения. При выполнении данной работы решены следующие задачи, а именно: предложены варианты возможных видов обработки; внесены изменения по классификации станков-роботов согласно возможным видам обработки.
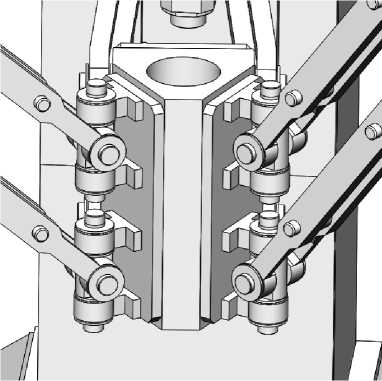
Виды обработок (рисунок 2): шлифование; сварка; электроэрозионная обработка; лазерная обработка. Изменению подвержен шпиндельный узел. Шпиндельный узел состоит из таких основных частей, как мотор-шпиндель, корпус шпиндельного узла, шарниров и крепежных элементов. Особое внимание уделяем корпусу шпиндельного узла (рисунок 3), в данном случае единственный элемент, где возможно изменение геометрических характеристик не внеся ущерб компоновке станка и ее полному функционированию.
При шлифовании пера лопатки (рисунок 2а) на данном станке необходимо спроектировать и изготовить приспособление позволяющий установить и закрепить ось Z заготовки вертикальном положении и зажать задним центром [1]. С использованием таких координат станка-робота как, X, Y, Z и С – вращение заготовки вокруг оси X. В случае сварки трением (рисунок 2б) требуется следующее: сварочный инструмент, воздействия ультразвукового воздействия (при необходимости) и др. На рисунке 4 представлена расширенная классификация станков-роботов за счет обеспечения других видов обработки.
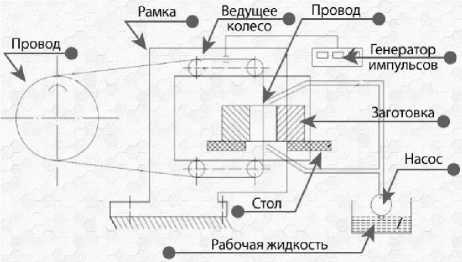
Использование такого вида обработки как электроэрозионная обработка требует следующих элементов: рабочей жидкости, провода, специального приспособления для подачи через шпиндельный узел провода, генератора импульсов и т.д.
Лазерная резка листового металла требует следующие элементы: резак, газ, энергетическую установку.
а

б
в
Рисунок 2 – Технологические виды обработок: а - визуализация траектории движения инструмента в программном продукте PowerMill; б – сварка трением; в – электроэрзионная обработка; г – лазерная резка металла;
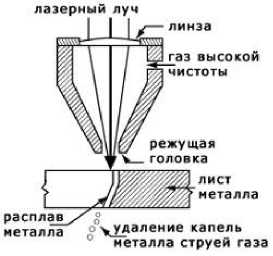
г
а
Рисунок 3 – Трехмерная модель корпуса шпиндельного узла: а –
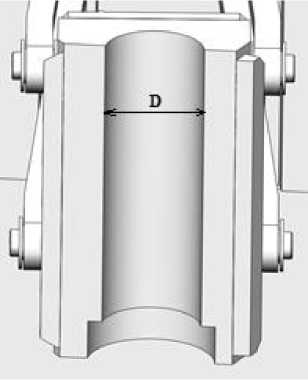
б
изометрия;
б - разрез вдоль плоскости XY;
Рисунок 4 –
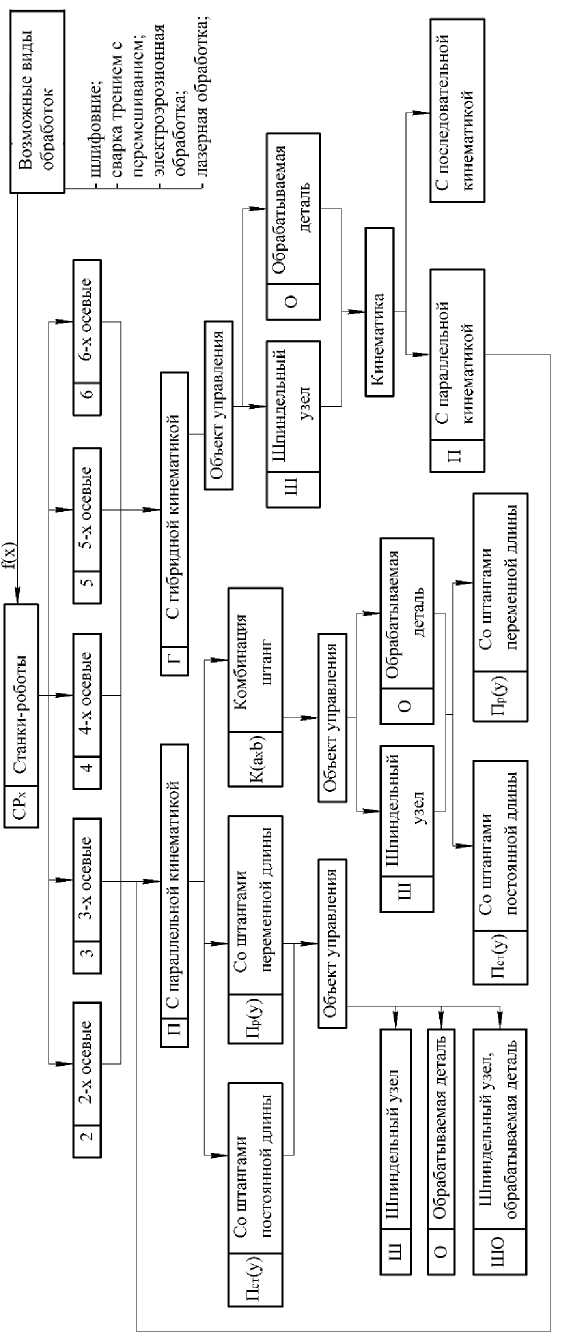
Классификация станков-роботов с расширенными технологическими возможностями [2].
Вывод: Согласно рисунку 2б на посадочный диаметр D, можно установить любые виды приспособлений за место мотор-шпинделя позволяющий вести такие виды обработок, как шлифование, сварка трением, электроэрозионная обработка, лазерная резка металла.
Список литературы Расширение технологических возможностей станка-робота за счет обеспечения других видов обработки
- Бушуев В.В. Основы конструирования станков: учеб. пособие. М.: Изд-во «Станкин», 1992. 520 с.
- Врагов Ю.Д. Анализ компоновок металлорежущих станков: Основы компоновки. М.: Машиностроение, 1978. 376 с.
