Расстановка корпусов плуга

Автор: Чупин П.В., Головин А.Ю., Демчук Е.В., Союнов А.С.
Журнал: Вестник Омского государственного аграрного университета @vestnik-omgau
Рубрика: Технические науки
Статья в выпуске: 2 (26), 2017 года.
Бесплатный доступ
Внедрение безотвальных технологий порождает такие проблемы, как обесструктуривание верхнего слоя почвы, который становится пылевидным и насыщенным сорняками, и уплотнение нижних слоев движителями колесных энергонасыщенных тракторов. Для устранения этих проблем необходимо периодически, раз в три или четыре года, пахать отвальными плугами. Поэтому исследования по отвальным плугам являются актуальными. Целью работы является повышение качества вспашки при снижении металлоемкости плуга и уменьшении габарита по длине, так как на качество вспашки (устойчивость хода по глубине обработки и ширине захвата) отрицательно влияет удлинение плугов - ухудшается их маневренность и увеличивается масса. Необходимо расставлять корпуса на оптимальное межкорпусное расстояние, которое зависит от величины зоны деформации почвы корпусом. Представлена расчетная схема и графоаналитический метод определения зоны деформации трехгранным клином при блокированном (в условиях первой борозды) и полусвободном резании. При помощи расчетной схемы и тригонометрии определен угол резания трехгранного клина, который лежит в одной плоскости (перпендикулярно рабочей грани) с углом скалывания. Представлено математическое обоснование теоретических зависимостей. Приводится подробное описание метода получения экспериментальных зависимостей величины зоны деформации от углов постановки рабочих граней трехгранного клина к дну и стенке борозды. При сравнении теоретических и экспериментальных данных по величинам деформации можно сделать вывод, что теоретическая зависимость дает усредненные значения между величинами деформации, полученными экспериментально для разных по свойствам сред: сыпучей бессвязной среды - воздушно-сухого песка и песка, доведенного до влажности, при которой он поддается формовке, то есть в какой-то степени приближается к свойствам «спелой» почвы.
Зона деформации, трехгранный клин, угол резания, межкорпусное расстояние, плуг
Короткий адрес: https://sciup.org/142199333
IDR: 142199333 | УДК: 631.312
Arrangement of plough bottoms
Enhanced implementation boardless technology generates problems such as obesstrukturivanie topsoil that becomes pulverized, and saturated with weeds, and the lower layers of compacted wheel propulsion power tractors. To resolve these problems, you should periodically every three or four years to plow moldboard plows. Therefore moldboard plows studies are relevant. The aim is to improve the quality of plowing plow with a decrease in metal consumption and reduced dimensions in length, as the quality of plowing (stability stroke depth of processing and working width) adversely affects the elongation of plows. Deteriorating their agility and increases weight. It is necessary to place the body in the optimum intercase distance that depends on the soil deformation zone of the body. It presents the design scheme and graphic-analytical method for the determination of the deformation zone with a triangular wedge of locked (in the conditions of the first furrow) and semi-free cutting. Using a design scheme and trigonometry to determine the angle of cut triangular wedge, which lies in the same plane (perpendicular to the working face) with an angle shearing. A mathematical study of theoretical dependencies. A detailed description of the method of obtaining the experimental dependence of the magnitude of the deformation zone of the angle setting of working faces triangular wedge to the bottom and the wall of the furrow. When comparing the theoretical and experimental data on the strain amount of data it can be concluded that the theoretical dependence gives the average value between the values of deformation obtained experimentally for different on media properties: loose incoherent environment - air-dry sand and sand, brought to a moisture content at which it lends itself molding, that is, to some extent close to the properties of “ripeˮ soil.
Текст научной статьи Расстановка корпусов плуга
В настоящее время в Западной Сибири, в том числе в Омской области, все большее распространение получают технологии обработки почвы без оборота пласта даже в зонах, не подверженных ветровой эрозии.
Но при ежегодной безотвальной вспашке появляются проблемы. Верхний слой почвы обесструктуривается, становится пылевидным, насыщается семенами сорняков, а вся технология требует применения гербицидов, которые отрицательно влияют на экологию. Нижние слои пахотного горизонта год от года уплотняются движителями энергонасыщенных тракторов (особенно колесных) настолько, что почвообрабаты-
вающие орудия сами под действием собственной силы тяжести не заглубляются. Для устранения этих недостатков рекомендуется раз в три или четыре года пахать отвальным плугом, чтобы обернуть пласт обесструктуренным, насыщенным сорняками слоем почвы вниз, откуда сорняки не прорастут или прорастут ослабленными [1].
Для свободного прохода почвенного пласта между корпусами их необходимо расставить так, чтобы предыдущий корпус был вне зоны деформации почвы следующим корпусом. Таким образом, межкорпусное расстояние (по ходу плуга) складывается из габарита корпуса по длине и величины зоны деформации. От межкорпусного расстояния зависит длина плуга и устойчивость его хода по глубине обработки и ширине захвата (качество вспашки), а также маневренность всего пахотного агрегата [2].
Целью работы является повышение качества вспашки при снижении металлоемкости плуга.
Объекты и методы
Определению зоны деформации двугранного клина посвящен целый ряд работ. Показателем величины деформации является угол скалывания у - угол между плоскостью скалывания и направлением движения лезвия клина.
Основоположник земледельческой механики В.П. Горячкин [3], используя теорию Мора, получил:
^ = 90 0 - а + ф + М , (1) где а - угол постановки клина к дну борозды; ф - угол трения почвы о сталь; д - угол внутреннего трения почвы.
Но эта формула точна для α = 9°, а при α = 30° дает расхождение с опытными данными. Объясняется это изменением коэффициента трения почвы о сталь при изменении угла постановки клина к дну борозды [4].
На основании теоретических и экспериментальных исследований П.Г. Свечников [5] получил следующую зависимость:
tg V = cos а . (2)
По аналогии с двугранным клином угол скалывания у должен измеряться в плоскости, перпендикулярной плоскости трехгранного клина АВС (рис. 1), в которой лежит равнодействующая силы нормального давления N и силы трения F [4] . Сила трения F действует по траектории движения пласта S . Значит, равнодействующая сил S и F будет лежать в плоскости, образуемой векторами S N . Положение вектора S в плоскости клина АВС определяется следующим уравнением [6]:
tg n = cos s • ід ү . (3)
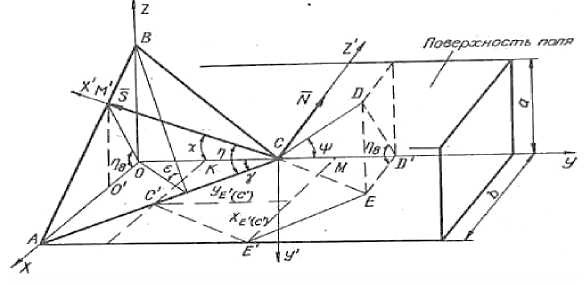
Рис. 1 . Расчетная схема для определения зоны деформации почвы трехгранным клином
Для дальнейших рассуждений определим положение плоскости S N по отношению к осям X, У, Z. Построим новую систему координат так, что ось X пойдет по S, ось Z' по N, а ось У перпендикулярно этим осям, т.е. плоскости S N . Определим направляющие косинусы осей X', У, Z' в системе координат X, У, Z. Направляющие коси- нусы осей X' и Z, направленных соответственно по векторам S и N, известны [6]. Для определения направляющих косинусов оси У (12; т2; п2) составим следующую схему:
X
X
cos η sin γ – cos ε cos γ sin η
l 1
У
ctg8. УУ -----Г" \ Ctg 8 + cos ү
Z
l 2 sin ε cos γ
l 3
У -cos п cos ү - cos е sin ү sin n
m 1
m 2 sin γ sin ε
m 3
Z sin ε sin η
n 1
- COSYJ —2---- y
У Ctg 8 + COS ү
n 2
cos ε
n 3
Значения 1 2 , m 2 , n 2 , определим из следующей системы уравнений:
l3l 2 + m3m 2 + n3n3 — 0;
-
< ll + mxm 2 + nn — 0;
2 22
l3 + m 2 + n2 — 1.
Подставим известные значения из схемы в уравнения системы (4), проведем преобразования и найдем значения 1 2 , m 2 , n 2 .
Комбинацию знаков n 2 и 1 2 возьмем по направлению осей на рис. 1. Найденные значения m 2 , 1 2 , п 2 запишем в схему и проанализируем ее.
Равенство нулю направляющего косинуса между осями У и У является условием их перпендикулярности. Но ось У перпендикулярна и плоскости S N. Значит, ось У лежит в плоскости S N . Отсюда следует, что:
-
- траектория движения пласта S есть линия пересечения плоскости клина АВС с перпендикулярной ей плоскостью, проходящей через ось У.
-
- угол резания х [6] лежит в плоскости, перпендикулярной плоскости клина АВС.
Тогда угол скалывания у, лежащий в плоскости S N, будет так же, как и угол резания х, измеряться от оси У, т.е. угол резания х и угол скалывания у лежат в одной плоскости, перпендикулярной плоскости клина АВС. Это дает право предполагать, что зависимость (2), полученная для двугранного клина, может быть применима и для трехгранного в следующем виде:
tgy = cosx . (5)
Угол х может быть определен по известной зависимости [6]:
sin x = sin ү sin е. (6)
Для определения величины зоны деформации нужно определить координаты точки D - точки выхода плоскости скалывания на поверхность (рис. 1).
Удобнее координаты точки D отсчитывать от носка клина (точка C).
X d ( C ) —
a tgne ’
V
D ( C )
a sin iygy
Прямая ЕЕ' (рис. 1) является горизонтальной проекцией линии пересечения плоскости скалывания с поверхностью поля при блокированном резании. Она параллельна лезвию клина на всех участках по ширине захвата, где а = const . Точка E ' - горизонтальная проекция точки пересечения этой линии с верхним ребром пласта. Это точка возможного контакта скалываемой части со стойкой (башмаком) предыдущего корпуса.
Для экспериментальной проверки полученных зависимостей были изготовлены трехгранные клинья с различным сочетанием углов γ = 30–60° и ε = 25–65°, одинаковой ширины b = 35 мм и высоты, равной 35 мм. Глубина хода лезвия клина во всех опытах 25 мм. Деформируемая среда - песок сухой просеянный и песок влажностью 16%.
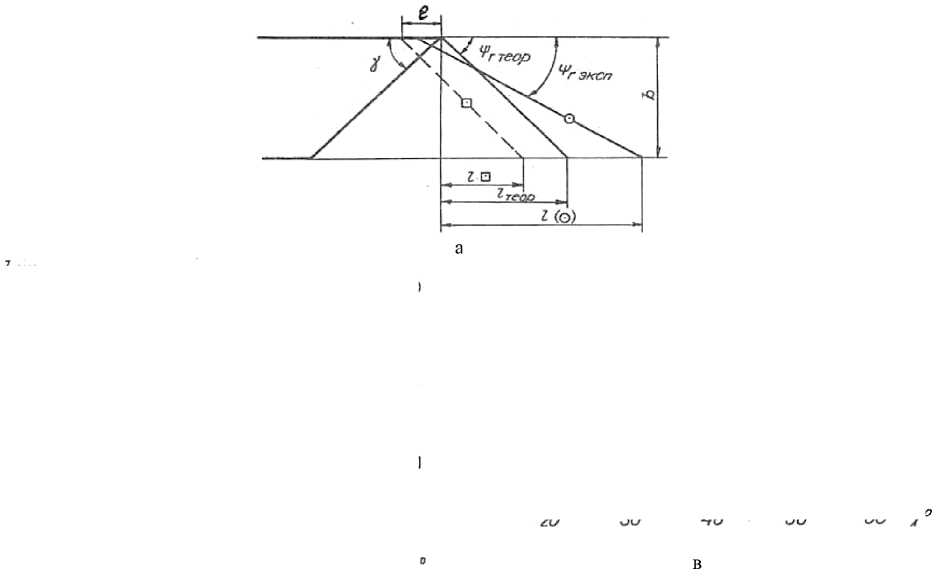
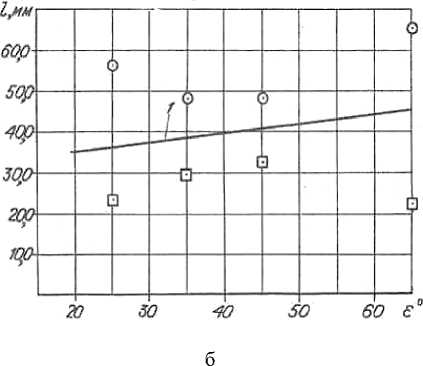
Рис. 2. Зона деформации трехгранным клином при полусвободном резании: а - схема деформации;
б - теоретическая зависимость 1 ( l = f(e) при b = 35 мм, а = 25 мм, ү = 45°);
в - теоретическая зависимость 2 ( l = f(Y) при b = 35 мм, а = 25 мм , е = 25°);
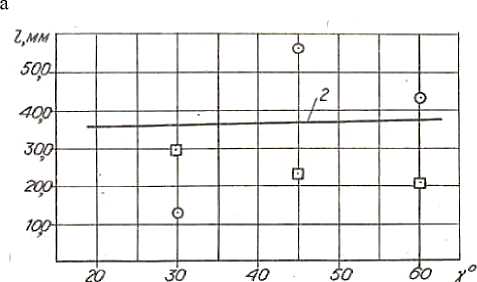
О И экспериментальные данные соответственно для сухого и влажного песка v , экспериментальные данные соответственно для сухого и влажного песка
-
В.П. Горячкин [3] указывал, что теоретически должен быть намечен двоякий путь при рассмотрении резания в неограниченной (блокированное резание - в условиях первой борозды) и ограниченной среде (например, полусвободное резание).
Наличие свободной борозды с одной стороны деформируемого пласта приводит к более легкому смещению его в эту сторону. Поэтому действие угла резания трехгранного клина проявляется главным образом в направлении открытой борозды, т.е. в горизонтальной плоскости. Величина деформации при этом характеризуется горизонтальным углом скалывания ^ г (рис. 2). Для определения расчетным путем угла ^г можно воспользоваться уже известной зависимостью (2):
tg y r = cos х . (9)
Результаты исследований
Для определения величины деформации в линейных единицах определим l – расстояние от носка клина до точки выхода трещины к стенке борозды (рис. 2).
l = —— = - b- . (10)
tg^r cos x
На основании этой формулы построим теоретические зависимости l = f ( γ ) и l = f ( ε ) при b = 35 мм и сравним их с экспериментальными данными (рис. 2).
Для определения экспериментальной величины зоны деформации при полусвободном резании замерялся угол между направлением движения и трещиной (уГзксп) и фиксировалось также положение вершины этого угла относительно носка клина е (рис. 2). Экспериментальная величина деформации в линейных единицах может быть определена по следующей зависимости:
l = —ь—
эксп tgV Гжсп
При полусвободном резании величина зоны деформации зависит от обоих углов ( γ и ε ), но при малых ( ε ) (примерно равных углам у существующих рабочих органов) угол ( γ ) мало влияет на величину зоны деформации.
Заключение
Сравнивая теоретические и экспериментальные данные (рис. 2), можно сделать вывод, что зависимость (10) дает усредненное значение между величинами деформации, полученными экспериментально для разных по свойствам сред. Сыпучая бессвязная среда была представлена воздушно-сухим песком. Второй почвенной средой был песок, доведенный до влажности, при которой он поддается формовке, то есть в какой-то степени приближается к свойствам «спелой» почвы. При проектировании плугов общего назначения предполагается их работа на разных по типу и влажности почвах. Поэтому для определения зоны деформации, необходимой для расстановки корпусов этих плугов, можно применить зависимость (10).
P.V. Chupin, A.Yu. Golovin, E.V. Demchuk, A.S. SoyunovOmsk State Agrarian University named after P.A. Stolypin, Omsk
Arrangement of plough bottoms
Список литературы Расстановка корпусов плуга
- Чупин П.В. Исторические аспекты и проблемы механизации земледелия юга Западной Сибири и Казахстана/П.В. Чупин, М.П. Чупина//Исторические аспекты, состояние и перспективы развития земледелия в Сибири и Казахстане: материалы Междунар. науч.-практ. конф., посвящ. 60-летию освоения целинных и залежных земель. -Омск, 2014. -С. 108-110.
- Кленин Н.И. Сельскохозяйственные машины/Н.И. Кленин, С.Н. Киселев, А.Г. Левшин. -М.: КолосС, 2008. -816 с.
- Горячкин В.П. Земледельческая механика/В.П. Горячкин//Собр. соч. -2-е изд. -T. 1. -М.: Колос, 1968. -С. 11-282.
- Чупин П.В. Обоснование схемы плуга для ромбовидной вспашки: дис.. канд. техн. наук/П.В. Чупин. -Челябинск, 1987. -176 с.
- Свечников П.Г. Обоснование параметров плоскорежущей лапы с переменным углом резания для глубокого рыхления почвы: дис.. канд. техн. наук/П.Г. Свечников. -Челябинск, 1984. -191 с.
- Бледных В.В. Основные закономерности процесса движения почвы по трехгранному клину/В.В. Бледных//Динамика почвообрабатывающих агрегатов и рабочие органы для обработки почвы: науч. тр./ЧИМЭСХ. -Челябинск, 1982. -С. 4-14.
