Разработка алгоритма обучения мобильного робота в целях обнаружения препятствий в замкнутом пространстве

Автор: Авсеева О.В., Ларина М.В.
Журнал: Вестник Воронежского государственного университета инженерных технологий @vestnik-vsuet
Рубрика: Информационные технологии, моделирование и управление
Статья в выпуске: 3 (73), 2017 года.
Бесплатный доступ
Резюме: XXI век – век высоких технологий. В настоящее время наша жизнь окружена информационными технологиями: у каждого есть мобильный телефон, компьютер и прочая техника (иногда называемая гаджетами). Сами не замечая, мы все больше и больше используем их в своей жизни. Уже дошло до того, что мы начинаем использовать роботов в своих целях. Не пройдет и десяти лет, как у каждого будет свой личный мобильный робот. Правильно запрограммированный робот может выполнять большое количество задач. Одной из распространенных проблем, возникающих при проектировании роботов, является проблема разработки эффективного алгоритма обхода препятствий. Робот во время своего движения не должен застревать и останавливаться, пока не выполнит задачу. Для успешного выполнения данной задачи в памяти робота должна храниться карта рабочего пространства, на которой отмечены места, где находятся препятствия для робота. Необходимо разработать алгоритм, позволяющий роботу построить карту местности за конечное (минимальное) время. Карта представляет собой поверхность замкнутого пространства, разделенную на квадраты. Площадь каждого квадрата равна площади основания робота или квадрату длины шага робота. Для изучения пространства используется алгоритм, основанный на алгоритмах движения робота «Спираль» и «Движение вдоль стены».Существует множество алгоритмов обхода препятствий. Наиболее эффективным является алгоритм Дейкстры. Этот алгоритм применим только к графам с неотрицательными весами. Алгоритм Дейкстры находит кратчайшие пути к вершинам графа в порядке их удаления от данной исходной вершины. Главным в алгоритме Дейкстры является то, что достаточно сравнить длины таких путей.
Мобильный робот, алгоритм, карта местности
Короткий адрес: https://sciup.org/140229882
IDR: 140229882 | DOI: 10.20914/2310-1202-2017-3-65-67
Development learning algorithm of mobile robot to detect obstacles in confined space
XXI century – the age of high technology. Now our life is surrounded by information technology: everyone has a cell phone, computer and other appliances (sometimes called gadgets). Themselves without noticing, we increasingly use them in their lives. Already it reached the point that we begin to use the robots for their own purposes. In less than ten years, each will have their own personal mobile robot. Properly programmed robot can perform many tasks. One of the common problems encountered in the design of robots, is the problem of developing an effective obstacle avoidance algorithm. Robot during their movement should not get stuck and stop until they have accomplished the task. To successfully perform this task in robot memory card should be stored workspace, which marked the places where there are obstacles to the robot. It is necessary to develop an algorithm that allows the robot to build a map of the area for the final (minimal) time. The map is a surface enclosed space that is divided into squares. The area of each square equal to the area of the robot base or square robot step length. To study the space used by an algorithm based on the algorithms of “Spiral” movement of the robot and the “movement along the wall”. There are many obstacles crawling algorithms. The most effective is Dijkstra's algorithm. This algorithm applies only to graphs with non-negative weights. Dijkstra's algorithm finds the shortest way to the top of the graph in order to remove them from a given source vertex. Central to Dijkstra's algorithm is that it is enough to compare the length of such paths
Текст научной статьи Разработка алгоритма обучения мобильного робота в целях обнаружения препятствий в замкнутом пространстве
XXI век – век высоких технологий. В настоящее время наша жизнь окружена информационными технологиями: у каждого есть мобильный телефон, компьютер и прочая техника (иногда называемая гаджетами). Сами не замечая, мы все больше и больше используем их в своей жизни. Уже дошло до того, что мы начинаем использовать роботов в своих целях. Не пройдет и десяти лет, как у каждого будет свой личный мобильный робот.
Правильно запрограммированный робот может выполнять большое количество задач. Одной из распространенных проблем, возникающих при проектировании роботов, является проблема разработки эффективного алгоритма обхода препятствий. Робот во время своего движения не должен застревать и останавливаться, пока не выполнит задачу. Для успешного выполнения данной задачи в памяти робота должна храниться карта рабочего пространства, на которой отмечены места, где находятся препятствия для робота [1–6].
Постановка задачи
Необходимо разработать алгоритм, позволяющий роботу построить карту местности за конечное(минимальное) время. Карта представляет собой поверхность замкнутого пространства, разделенную на квадраты. Площадь каждого квадрата равна площади основания робота или квадрату длины шага робота.
Метод решения
Для изучения пространства используется алгоритм, основанный на алгоритмах движения робота «Спираль» и «Движение вдоль стены» [7].
Алгоритм «Спираль» представляет собой движение по окружности с увеличение радиуса. На рисунк е 1 представлена блок-схема алгоритма.
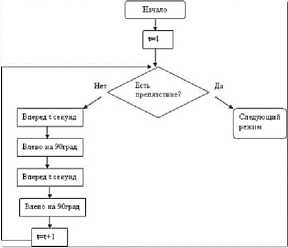
Рисунок 1. Алгоритм «Спираль»
Figure1. “Spiral” algorithm
Алгоритм «Движение вдоль стены» представляет собой алгоритм, при котором робот движется по периметру пространства. В отличие от алгоритма «Спираль» в данном алгоритме робот может обходить препятствия. Блок-схема алгоритма представлена на рисунке 2.
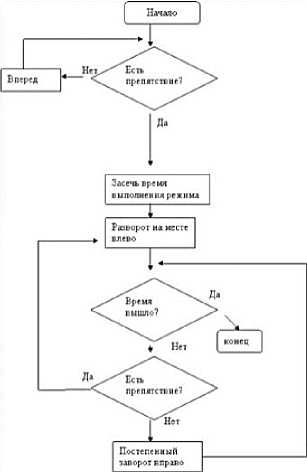
Рисунок 2. Алгоритм «Движение вдоль стены»
Figure 2. Algorithm “Movement along the wall”
Предлагаемый алгоритм обучения мобильного робота в целях обнаружения препятствий является модифицированным объединением двух вышеописанных алгоритмов. Алгоритм обучения состоит из трех частей. Первую часть можно назвать основной – это алгоритм прохода одного круга. Робот начинает свое исследование пространства с возможного периметра, и с каждым кругом он сужает его до радиуса меньше на единицу. Блок-схема алгоритма представлена на рисунке 3.
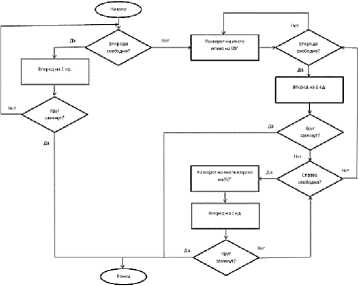
Рисунок 3. Алгоритм прохода одного круга
Figure 3. Algorithm pass one circle
Для того чтобы робот с каждым пройденным кругом сужал радиус, необходима вторая часть алгоритма – алгоритм начала исследования нового круга. На рисунке 4 представлена блок-схема алгоритма.
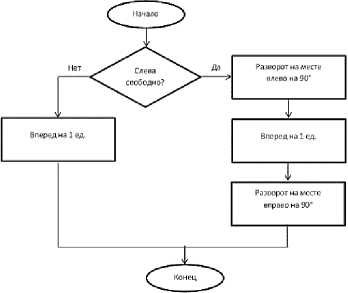
Рисунок 4. Алгоритм начала исследования нового круга Figure 4. Algorithm for beginning of the study the new circle
После окончания движения по данному алгоритму роботу необходимо проверить пространство на неисследованные участки (рисуно к 5) . В случае, когда препятствий будет мало и их форма будет простой, робот исследует пространство за один проход. В противном случае останутся темные, неизвестные роботу участки. Чтобы робот не затратил много времени на путь до такого участка, необходимо использовать алгоритм поиска кратчайшего пути. Так как на пути робота могут быть препятствия, то алгоритм должен искать кратчайший путь, обходя все возможные препятствия на своем пути.
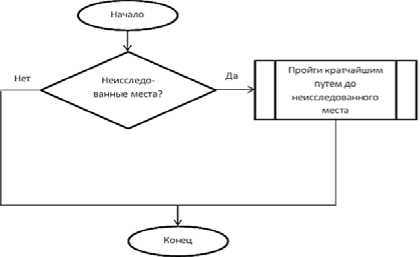
Рисунок 5. Алгоритм завершения обучения
Figure5. Algorithm for completion of training
Заключение
Существует множество алгоритмов обхода препятствий. Наиболее эффективным является алгоритм Дейкстры. Этот алгоритм применим только к графам с неотрицательными весами. Алгоритм Дейкстры находит кратчайшие пути к вершинам графа в порядке их удаления от данной исходной вершины. Главным в алгоритме Дейкстры является то, что достаточно сравнить длины таких путей [8].
Список литературы Разработка алгоритма обучения мобильного робота в целях обнаружения препятствий в замкнутом пространстве
- DiGiampaolo E., Martinelli F. Mobile robot localization using the phase of passive UHF RFID signals//IEEE Transactions on Industrial Electronics. 2014. V. 61. №. 1. P. 365-376.
- Pierlot V., Van Droogenbroeck M. A new three object triangulation algorithm for mobile robot positioning//IEEE Transactions on Robotics. 2014. V. 30. №. 3. P. 566-577.
- Duchoň F. et al. Path planning with modified a star algorithm for a mobile robot//Procedia Engineering. 2014. V. 96. P. 59-69.
- Юдинцев Б. С., Даринцев О. В. Интеллектуальная система планирования траекторий мобильных роботов, построенная на сети Хопфилда//Современные проблемы науки и образования. 2014. №. 4.
- Бобырь М. В., Милостная Н. А. Нечеткая модель интеллектуальной системы управления мобильным роботом//Проблемы машиностроения и автоматизации. 2015. №. 3. С. 57-67.
- Мистров Л.Е., Павлов В.А. Обеспечение конфликтной устойчивости функционирования информационных систем на основе комплекса технических средств//Вестник ВГУИТ. 2016. № 1. С. 83-88.
- RoboCraft. URL: http://robocraft.ru/blog/
- Левитин А.В. Алгоритмы: введение в разработку и анализ. М.: Вильямс, 2006. 576 с.
