Разработка алгоритмов системы управления самолёта схемы «летающее крыло»

Автор: Мурзагалин Р.М., Кувшинов В.М., Власов А.Н.
Журнал: Труды Московского физико-технического института @trudy-mipt
Рубрика: Аэро- и гидромеханика
Статья в выпуске: 1 (25) т.7, 2015 года.
Бесплатный доступ
Рассматривается самолёт схемы «летающее крыло». Для анализа особенностей динамики самолёта данной схемы создана программно-математическая модель динамики самолёта в среде MATLAB/Simulink. Предложена методика выбора параметров системы путевого управления самолёта с позиции обеспечения близкой к минимальной величины потребной скорости отклонения расщепляющихся щитков (РЩ). Рассмотрены различные способы возможного снижения значений при расчётных воздействиях. Проведена оценка потерь аэродинамического качества при использовании РЩ как органа путевого управления.
Летающее крыло, синтез систем управления, сду путевого канала, система управления летающего крыла
Короткий адрес: https://sciup.org/142186057
IDR: 142186057 | УДК: 533.694.54
Текст научной статьи Разработка алгоритмов системы управления самолёта схемы «летающее крыло»
В настоящее время в мире ведутся разработки самолётов схемы «летающее крыло», как для военных, так и для гражданских нужд. На данном этапе развития авиационной техники уже существует несколько самолётов схемы «летающее крыло», в частности находящийся в эксплуатации стратегический бомбардировщик Northrop В-2 Spirit, ведутся доработки БЛА Х-47В, также находится в эксплуатации БЛА RQ-170. Ведутся разработки в Китае («Sharp Sword»), Великобритании («Taranis»), Франции («Neuron»), России («Скат»).
Данное компоновочное решение позволяет получить более высокие, чем у самолётов традиционных схем, аэродинамические характеристики крейсерского полёта, за. счёт снижения лобового сопротивления.
Однако аэродинамическая схема, «летающее крыло» обладает рядом особенностей, значительно затрудняющих её использование. Первая - возможная путевая статическая неустойчивость как следствие отсутствия ВО, вторая - особенности зависимостей моментов рыскания и крена, при использовании расщепляющихся щитков в качестве органа, путевого управления. Это вызывает значительные проблемы с обеспечением потребных характеристик устойчивости и управляемости самолета и требует разработки специальной методики выбора, параметров системы управления.
Целью данной работы является анализ аэродинамических характеристик компоновки самолета, «летающее крыло», исследование динамики и устойчивости бокового движения самолёта данной схемы с системой управления при расчётных возмущающих и управляющих воздействиях, разработка алгоритмов СДУ с учетом необходимости минимизации потребных величин скорости отклонения органа, путевого управления (расщепляющиеся щитки). Рассмотрены различные способы снижения потребной скорости отклонения органа. путевого управления, проведён анализ их преимуществ и недостатков.
Кроме того, выполнено математическое моделирование полёта, в турбулентной атмосфере с целью оценки влияния расщепляющихся щитков на величину аэродинамического качества.
2. Математическая модель
Описание объекта исследования. Объектом исследования является однодвигательный неманевренный самолёт схемы «летающее крыло». У данного самолёта отсутствует вертикальное оперение (ВО), управление по рысканию осуществляется с помощью расщепляющихся щитков (РЩ). Эффективность щитков (создаваемый момент рыскания) в зависимости от угла их раскрытия 5рщ и угла атаки приведена ниже (рис. 1). Следует отметить значительную нелинейность эффективности щитков по углу их раскрытия.
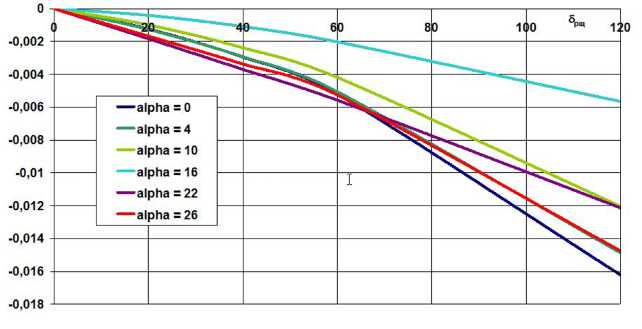
Рис. 1. Эффективность щитков по раскрытию (5рщ) при различных углах атаки
Использованы основные аэродинамические характеристики, полученные при испытаниях в АДТ тематической модели самолета схемы «летающее крыло». Запас путевой устойчивости т^ варьировало я в пределах т^ = 0.0002 ... 0.0006.
В процессе исследований рассматривались следующие расчётные возмущения.
-
1) Вихревой порыв бокового ветра, моделируемый следующим образом:
'" • ^

1 для Н=0;
^w = ± hL ИД где Wi Wi0 = 15 м/с.
Длина участка нарастания порыва hw варьируется от 30 до 200 м. Зависимость угла скольжения, вызванного ветром, 3w от времени представлена ниже.
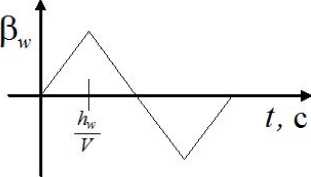
Рис. 2
Градиентный порыв бокового ветра. Максимальная интенсивность 15 м/с.
Турбулентная атмосфера со спектральной плотностью скорости боковых порывов ветра в форме Кармана:
_ 2 L 1 + 3 (1.3339LQ)2
Ф™ aw t [1 + (1.3339LQ)2]11/6 ’ где, crw - среднеквадратическое значение скорости ветра, L - интегральный масштаб турбулентности, И = ш/V) - «пространственная» частота, ш - циклическая (временная) частота (1/с).
Для описания движения самолёта использовались системы уравнений продольного и бокового возмущенного движений в виде dV dt da dt
Ao(a) + ^[А^элглс= (a, d3л) + ААэлгправ(а, 6Э л)] + г=1
dшz dt dӨ dt dH
- dt
+ АДрщглс, (a, dp щ) + АДрщгправ (a, dp щ) - g • Өо • Ө;
ш — Д)(а) — ^[АЯлглсв (a, ^э л) + АЯлгправ (a, ^э л)] — г=1
-
— АУрщглс, (a, dpщ) — АУрWnpав (a, dpщ) + V • cos Өо • Ө;
Mz (a) + Z[АМгэлілс, (a, d,л) + AMZэ ліпрм (a, d,л)] + г=1
+ AMZp щілс. (a, dpщ) + AMZp щіправ (a, dpщ) + АМ^ (a, M )
шг —
da dt 1
-
V0 • cos Өо • Р + г • sin Өо;
шг;
' dшж dt
dшу dt
dp dt
d^ dt dZ
- dt
M^ (a,M ) • p + My(a,M ) • ш, + MPy (a,M ) • Шу +
+ £[А M „.,„ (a,d..) — А M„ (a'л)] + А M.,„.„„ (a, d„ „) — А M„, „ (a,d,„): г=1
MP • p + M;■• (a, M ) • шж + M Py (a,M ) • шу +
+ ^[А M^ ліправ (a, d3Л) — А My3Л.лсв (a, d3л)] + А MypЩіправ(a, dpЩ) — А Mypщіправ(a, dpЩ); г=1
шж • sin a + Шу • cos a + ZP • p + 52[AZэлгпрM (a, d3л) — AZЭлілсв (a, d3л)] + г=1
+ ZPi4nP»=(a, dP щ)— ^щлев(a, dP щ)+V ■cos a ■sin 7;
шж — шу • tan Ро1
— V • cos Ө cdot sin pa.
3. Программно-математическая модель самолета
В боковом канале алгоритмы управления основаны на идее разделения движения крена и рыскания в полусвязанной системе координат. Используются сигналы обратных связей по угловым скоростям крена шж и рыскания Шу в полусвязанной системе координат, углу скольжения и крена.
Для описания динамики рулевых приводов использовалась нелинейная модель первого порядка с учетом ограничения скорости перекладки (добротность приводов D = 25с-1).
Учитывается дополнительное запаздывание в системе управления, обусловленное наличием фильтров упругих колебаний конструкции и цифровой реализацией СДУ дтцИ( |,р = 0.016с.
Для моделирования движения самолета с системой управления разработана программно-математическая модель динамики самолёта рассматриваемой компоновки в среде MATLAB/Simulink с использованием программного комплекса FlightSim. Модель, показанная на рис. 3, 4, включает в себя следующие блоки:
• модель динамики самолёта с органами управления,
• модель системы управления,
• модель приводов органов управления.
4. Алгоритмы поперечно-путевого управления
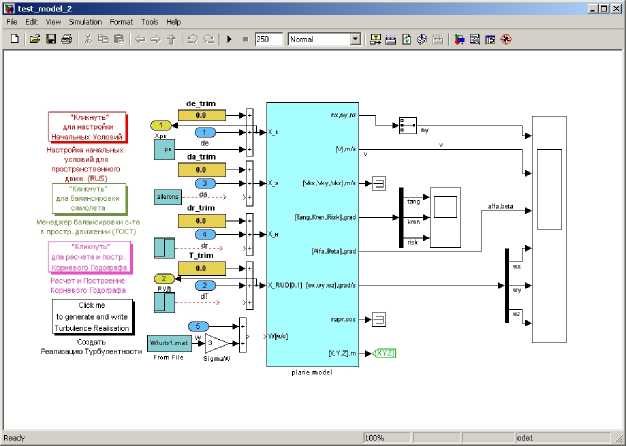
Рис. 3. Математическая модель самолёта, в среде MATLAB/Simulink
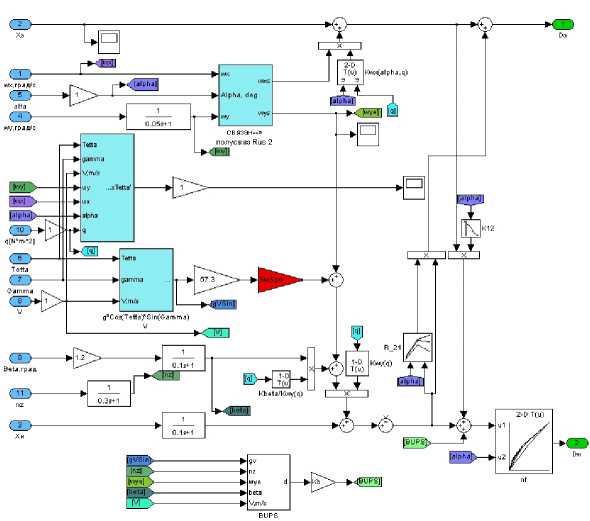
Рис. 4. Структурная схема, поперечно-путевого капала, в среде MATLAB/Simulink
Структурная схема системы поперечно-путевого управления самолета, используемой в данной работе, приведена на рис. 5. Алгоритм управления имеет вид
-
51 = ( 01+ +Т -ү" + К"' ■ + v ■ cos 6 ■ sin7 + К •
——— • /3 ]) • R22 + 5Ж • R12 ;
0.1р + 1
-
7 = (Аэл + К • Шхе) • R11 + 5У • R21,
где 5П - отклонение органа, путевого управления (расщепляющиеся щитки). 5ЭЛ - отклоне ние органа, поперечного управления (элевоны), и основан на. идее «развязки» управляющих моментов крена, и рыскания в полусвязанной системе координат с помощью коэффициентов R12, R21- Используется функционал управления статического типа с сигналами обратных связей по углу скольжения /3, угловым скоростям рыскания шУе и крена шХе в полусвязанной системе координат (с передаточными коэффициентами соответственно Кр,КШу,КШх). Сигнал, пропорциональный ^7 • sin7 • cos6, предназначен для улучшения характеристик спирального движения самолета с С ДУ и уменьшения угла скольжения при вращении самолёта. по крену.
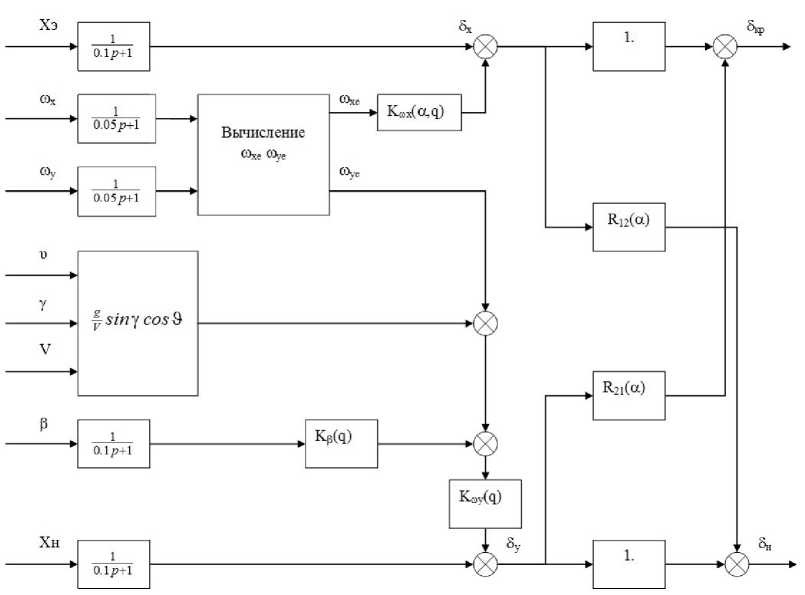
Рис. 5. Структурная схема, поперечно-путевого управления
Выбор параметров алгоритма, производился в следующем порядке:
-
1) Нелинейная коррекция эффективности органов управления по рысканию.
Так как зависимость момента рыскания АтУрщ нелинейна по углу раскрытия щитков, было решено подобрать такую корректирующую нелинейную функцию на. выходе системы управления, чтобы обеспечить квазилинейную зависимость момента рыскания АтУрЩ(5Н) от управляющего сигнала (5Н)•
При построении функции за. основу были взяты следующие требования:
-
а) зависимость АтУрщ близка к линейной;
-
б) после линеаризации значение КтУрщ при нулевом и полном раскрытиях щитков должно остатвся тем же, что и без функции, то еств Кт<у (0 ,120 )безфункции = Кту (0 ,120 )сфункцией- Была построена функция от двух параметров: угла раскрытия щитков и угла атаки nf (5рщ,о) (рис. 6).
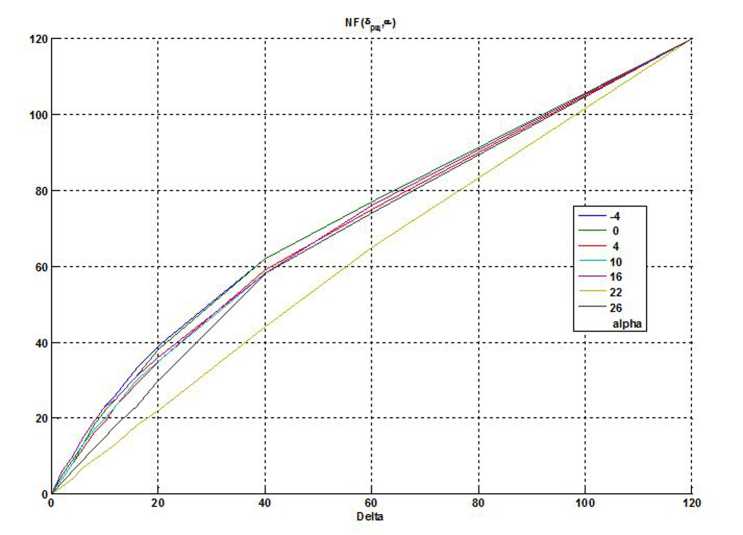
Рис. 6. Нелинейная функция
-
2) Распределение управляющих сигналов по органам поперечно-путевого управления и выбор коэффициентов «развязок» управляющих моментов. Закон распределения сигналов по органам поперечного (элевоны) и путевого (расщепляющиеся щитки) управления был выбран таким образом, чтобы разделитв движение крена и рыскания в полусвязанной системе координат.
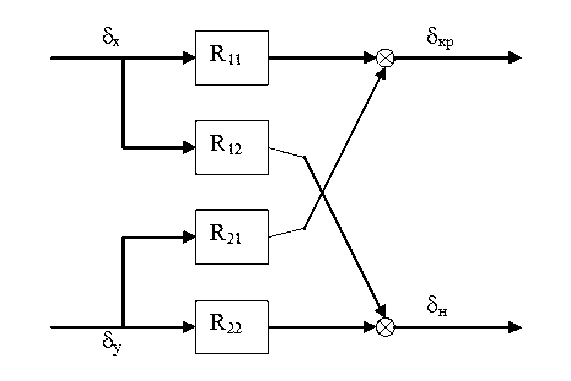
Рис. 7. Схема перекрёстных коэффициентов
Выбор коэффициента перекрестной связи Д12 производился из условия Муе = 0 при 5ЭЛ = 4лтах и при заданном 5Ж) а коэффициента Д21 из условия МЖе = 0 при
5Рщ = ваг. Здесь
МУе = Му • cos о + Мж • sin о;
МЖе = Мж • cos о — Му • sin о;
|
_ (м, + ^ м . ) _ М + ;М ) Му = 7-2 ; Мх = 7-2 ; !. • (1 - /й) л • (1 - /й;) |
Му, Мж - суммарные значения размерных моментов от всех используемых органов управления.
Для выбора коэффициентов R12 были использованы величины параметров, определённые при 5Ж = -25°; 5у = 0,10°, 20°, 40°; 60°, 120°, т.к. функция т^ линей на, а ту нелинейна.
Таблица!
R21
|
^рщ а |
0 |
10 |
20 |
40 |
60 |
120 |
|
-4 |
0,1320 |
0,0993 |
0,0800 |
0,0633 |
0,0417 |
0,0210 |
|
0 |
-0,0595 |
-0,0551 |
-0,0394 |
-0,0030 |
0,0020 |
0,0093 |
|
5 |
-0,0640 |
-0,0608 |
-0,0413 |
0,0097 |
0,0308 |
0,0521 |
|
10 |
-0,1801 |
-0,1682 |
-0,1356 |
-0,0681 |
-0,0249 |
0,0182 |
|
15 |
-0,5745 |
-0,4435 |
-0,3246 |
-0,2030 |
-0,1371 |
-0,0650 |
|
20 |
-0,4992 |
-0,4100 |
-0,3475 |
-0,2783 |
-0,1987 |
-0,0617 |
Т а б л и ц а 2
R12
|
Узла |
-4 |
0 |
5 |
10 |
15 |
20 |
|
25 |
0,0759 |
0,1741 |
0,3350 |
0,6753 |
1,5846 |
1,3563 |
-
3) Коэффициенты обратных связей. При выборе коэффициентов обратных связей были использованы следующие основные требования:
-
а) должны быть обеспечены не менее чем двукратные запасы устойчивости по общим коэффициентам усиления системы управления;
-
б) требования к корням: доминирующие корни характеристического уравнения замкнутой системы «самолёт - С ДУ»
Ар = (р - Асп) • (р - Акр) • (р2 + 2 • £ • р + ш0)
должны удовлетворять следующим условиям:
-
• движение крена: Лкр 6 —1... — 1, 5;
-
• боковое колебательное движение: недемпфированная частота у самолёта такого класса w q > 0,4с-1; относительное демпфирование ^ > 0.5;
-
• спиральное движение: |АСп| 6 0.05;
-
в) требования к «временным» характеристикам: требования к нормируемым параметрам переходных процессов. Время достижения угла крена у = 30° после ступенчатого отклонения «ручки управления по крену» - ty = 2.5 с. Время затухания колебаний переходного процесса после импульса дачи «педалей» - t3aт = 10 с.
Рассматриваются взлётно-посадочный режим ( Н = 0 м,14 = 67 м/с (минимальная посадочная скорость ~ 240 км/ч, а ~ 8... 9°) и режим крейсерского полёта (Н = 10 км, М = 0, 8, горизонтальный полёт).
Для нахождения коэффициентов КШу и Кр использовалась методика, изложенная в работе [4]. Предложенные алгоритмы позволяют отображать границы области устойчивости и области желаемого расположения корней замкнутой системы «самолёт-СДУ» в плоскость передаточных чисел КШу,Кр, что позволяет формализовать процесс выбора коэффициентов обратных связей и делает его более наглядным. Автоматически вычисляются запасы коэффициентов усиления по верхней и нижней границе.
На рис. 8 приведен пример, иллюстрирующий расчёт передаточных чисел при угле атаки а % 8°, Шу = 0.0004, режим взлёт/посадка (У ^ 240 км/ч, Н = 0). На рисунке показаны границы доминирующих корней. Зелёная линия показывает минимальную частоту, красная - максимальную, синяя - колебательность (у^), чёрная (слева сверху) - колебательная граница устойчивости, чёрная (снизу) - апериодическая граница. Фиолетовая прямая соответствует значением корней при RH .гр = 2.
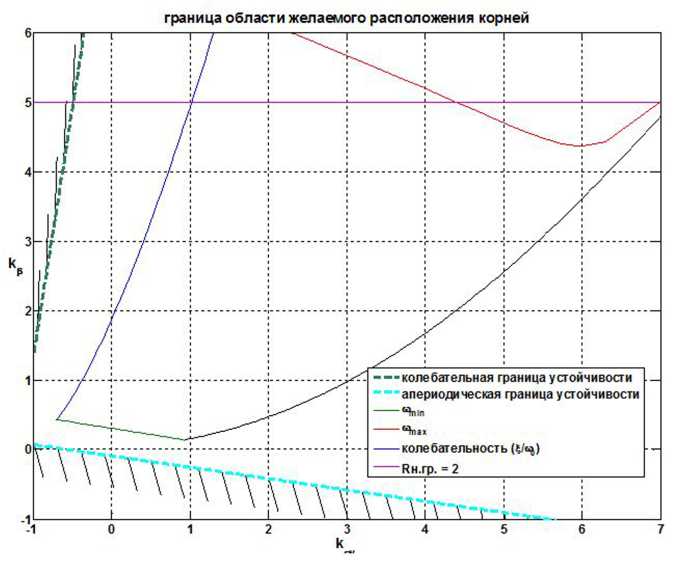
Рис. 8. Границы доминирующих корней
Выбранные значения коэффициентов обратных связей для различных тр приведены в таблице 3, соответствующие значения корней крена Акр, спирального движения Асп, собственной частоты Шо и относительного демпфирования £ также представлены в таблице 3. Выбранные значения коэффициентов обеспечивают выполнение основных требований, предъявляемых к корням характеристического полинома замкнутой системы «самолёт-СДУ».
ТаблицаЗ
Значение корней системы «самолёт-СДУ» при выбранных коэффициентах
|
р ШУ |
К.... |
Кр к |
ЯН .гр. |
шо |
£ |
^/Шо |
АСп |
^кр |
|
0,0002 |
4 |
0,526 |
2 |
0,94 |
0,707 |
0.752 |
0,0249 |
-2,15 |
|
0,0003 |
6 |
0,585 |
2 |
1,19 |
1,11 |
0.932 |
0,0285 |
-2,15 |
|
0,0004 |
6 |
0,825 |
2 |
1,34 |
1,06 |
0.791 |
0,0247 |
-2,15 |
|
0,0005 |
6 |
1,072 |
2 |
1,49 |
1,01 |
0.678 |
0,0223 |
-2,16 |
|
0,0006 |
6 |
1,315 |
2 |
1,62 |
0,962 |
0.593 |
0,0206 |
-2,16 |
5. Минимизация потребной скорости отклонения органов путевого управления
Неустойчивость самолета в боковом движении и наличие ограничения скорости перекладки органа управления может приводить к потере устойчивости замкнутой системы «самолет-СУУ» при некоторых критических возмущениях большой величины (т.н. неустойчивость в «большом»). Исследование устойчивости самолета с системой управления в боковом движении при больших возмущениях проводилось с точки зрения влияния передаточных чисел на устойчивость в «большом» и минимизации потребной для устойчивости при расчетных возмущениях скорости перекладки ^потр-
Ниже приведены графики значений потребной скорости раскрытия расщепляющихся щитков <^потр от значений запасов по нижней границе устойчивости RH,гр коэффициентов обратных связей К^у, Кр^ частоты вихревого порыва hw и степени путевой статической р неустойчивости т^.
Рис. 9. Парирование градиентного порыва ветра
Рис. 10. Парирование вихревого порыва ветра
На рис. 9 показана зависимость ^Потр от RH,гр при различных значениях коэффициентов обратных связей, при этом вдоль изолиний постоянных значений КШу запас устойчивости RH.гр меняется за счёт изменения коэффициента Кр /К^- Потребная скорость раскрытия щитков 9?потр искалась исходя из условия устойчивости при действии градиентного порыва ветра. По полученным данным видно, что при увеличении коэффициента КШу потребная скорость перекладки уменьшается, а при увеличении RH,гр, при фиксированном КШу, ^Потр растёт. При RH.гр=2 получаем минимальные потребные скорости. Дальнейшее снижение ^потр возможно только при нарушении требования к величине запаса по нижней границе.
На рис. 10 приведена зависимость потребной скорости ^Потр для обеспечения устойчивости при действии вихревого порыва (при фиксированном значении КШу и RH,гр). Также на графике представлены значения <дПотр для градиентного порыва ветра, чтобы показать, что для парирования вихревого порыва ветра необходимы скорости раскрытия ^потр в несколько раз больше, чем для парирования градиентного порыва. При RH.гр = 2 также имеем минимальные потребные скорости. При «малой» степени неустойчивости самолета т^ ~ 0, 0002 ... 0, 0004 потребная величина ^Потр даже при наиболее неблагоприятном значении h^ = 100... 120 м составляет 14... 60 град/с.
Возможна потеря устойчивости «в большом» по каналу рыскания при воздействии управляющего сигнала по крену. Причина такой неустойчивости - большие величины ^ при Ад « 180о, 360О. На рис. 11 показана потребная скорость перекладки для данного случая в зависимости от коэффициента КШу. Изменение RH.гр слабо влияет на <дпотр, а чем больше К^, тем меньше потребная скорость перекладки.
Рис. 11. Устойчивость «в большом» по командному сигналу по крену
На рис. 12 приведено значение параметра t3aT (время затухания) при подаваемом импульсе в путевом канале при различных значениях параметров КШу (RH.гр постоянна), т^. Также показано максимально допустимое время затухания в путевом канале. Чем больше КШу) тем меньше время затухания.
Рис. 12. Время затухания на «импульс» педалей
Рисунок 13 иллюстрирует зависимость 9?Потр ПРИ различных коэффициентах обратных связей КШу, К ^ различных запасах устойчивости по нижней границе RH,гр, различных возмущениях от запаса статической устойчивости т^. На этом графике показано, что при значении т^ = 0.0004 вели чина ^Потр достигает (а при увеличении т^ превышает) принятую максимально допустимую скорость перекладки <дПотр = 80 град/с.
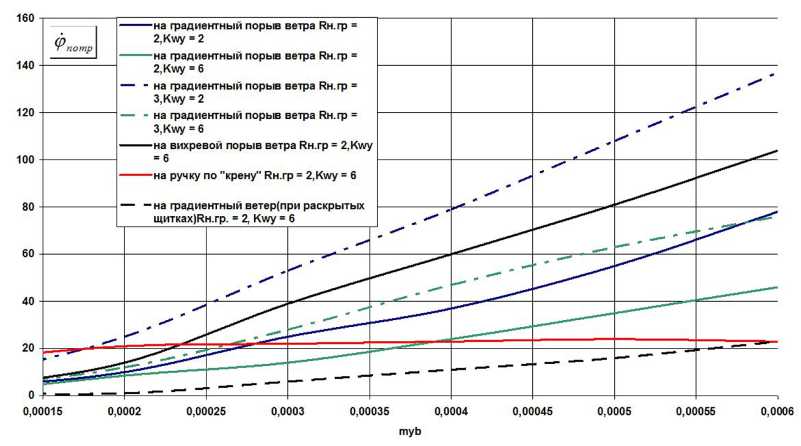
Рис. 13. ^потР(т^)
6. Разработка алгоритмов С ДУ, обеспечивающих снижение потребной мощности привода органа путевого управления
В случае воздействия вихревого порыва ветра снижение величины (дпотр, а следовательно, и мощности привода, возможно за счёт использования так называемого блока уменьшения потребной скорости (БУНС). Идея используемого в данной работе БУПС заимствована из работ Ю. Г. Живова и А. М. Поединка. В упрощённом виде для продольного канала управления алгоритм блока приведён в работе [3].
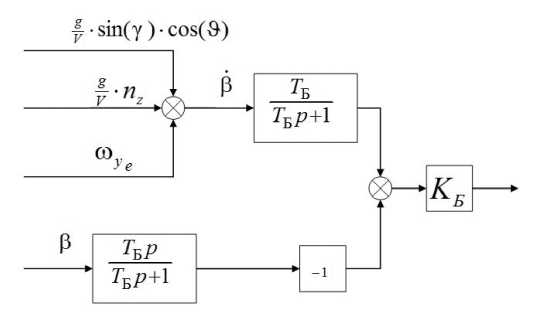
Рис. 14. Схема БУПС
Задача этого блока - уменьшить входной сигнал на привод при воздействии порыва ветра ( 3™ = 0). Принцип работы БУПСа следующий: в канал путевого управления подаётся разность сигналов АФрщ = Кб • ( Т Д + г • Зг — тЦ+Т • 3 ) гДе значение параметра Зг - геометрический («кинематический») угол скольжения при 3w = 0) - вычисляется из уравнений движения, т.е Зг = Ц • м7 + ^^ • cos а + шж • sin а + Ц • sin 7 • cos ф а величина угла скольжения 3 измеряется. Схема БУПС представлена на рис. 14.
Авторами идеи БУПС было рекомендовано выбрать величину постоянной времени Тб в пределах 3-5 с, поэтому сначала для режима с неустойчивостью m^ = 0.0004 пр и Тб = 5 с, исходя из условия минимальной скорости перекладки был выбран коэффициент усиления Кб = 4. Затем для найденного Кб снова проводится подбор Тб для того же m^.
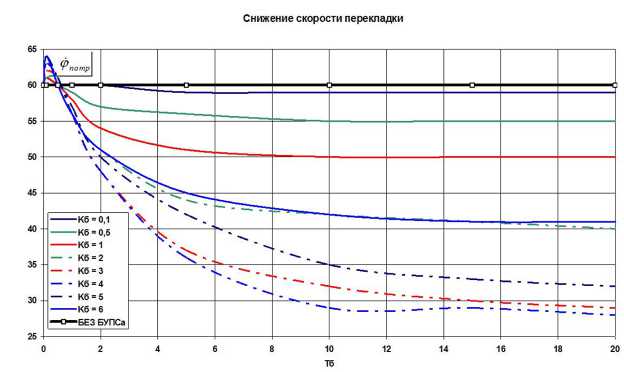
Рис. 15. ^потр(Тб,Кб)
На рис. 15 показаны значения ^Потр ПРИ различных параметрах БУПСа. Как показано на рисунке, с помощью БУПС и подборки его коэффициентов можно снизить потребную скорость при рассмотренной величине m^ = 0.0004 в 2 раза. Следует отметить, что с увеличением времени Кц происходит значительное снижение потребной скорости перекладки.
7. Начальное расщепление щитков
Помимо предложенного метода уменьшения мощности привода (потребной скорости перекладки), можно рассмотреть случай наличия начального расщепления щитков. Если щитки изначально не раскрыты, то они работают по очереди, а если щитки раскрыты изначально, то парировать любое возмущение С ДУ будет как минимум с вдвое большей эффективностью, так как работать будут уже оба щитка (один щиток будет открываться, а второй - закрываться).
потребная скорость перекладки при раскрытых щитках
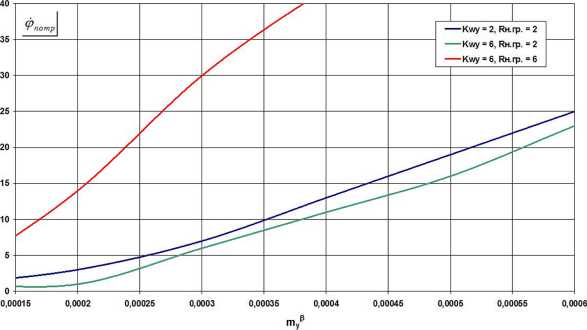
Рис. 16. ^потр при изначально раскрытых щитках
Для изначально раскрытых щитков отдельно подбираются коэффициенты обратных связей, так как их эффективность в этом случае другая. Процесс подбора выглядит так же, как и для не раскрытых щитков. Исходя из предыдущих вычислений, коэффициенты необходимо искать с запасом по нижней границе 2 (RH,гр = 2). На рис. 16 представлена зависимость потребной скорости расщепления щитков при различной степени статической неустойчивости т^ ,КШуи RH.гр при начально раскрытых щитках.
Рассматриваемое мероприятие эффективно с точки зрения снижения потребной скорости отклонения расщепляющихся щитков, которое по сравнению с вариантом с 5орЩ = 0 составляет 50%. Но также имеют место и недостатки. Происходит снижение аэродинамического качества на 20%.
8. Результаты статистического моделирования
Потери аэродинамического качества при полёте в турбулентной атмосфере Орган путевого управления, который должен парировать все возмущения при полёте в атмосфере, - расщепляющиеся щитки. При полёте в турбулентной атмосфере необходимо в каждый момент времени парировать колебания, создаваемые возмущения в путевом канале. Оценим потери аэродинамического качества, которые происходят из-за прироста коэффициента сопротивления при парировании возмущений, вызванных турбулентной атмосферой.
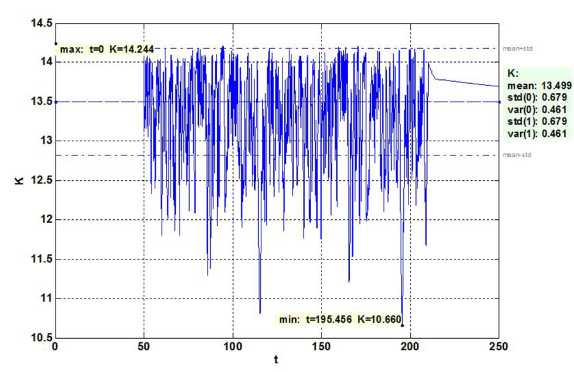
Рис. 17. Аэродинамическое качество (взлёт/посадка)
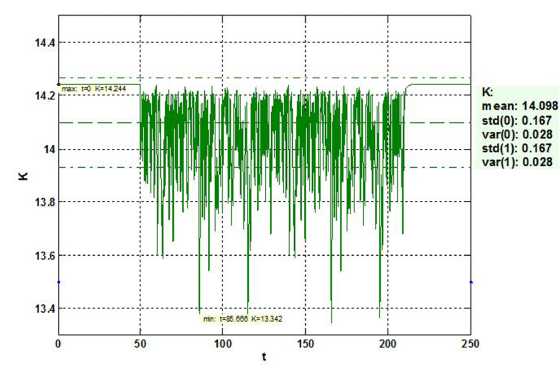
Рис. 18. Аэродинамическое качество (крейсер)
Были рассмотрены разные среднеквадратические значения боковой компоненты скорости ветра по Карману (aw = 1...2.. .3 м/с). Рассматривался режим взлёт/посадка (V = 240 км/ч, Н = 0) и крейсерский (Н = 10 000 м, М = 0.8). На рис. 17, 18 пока- заны значения аэродинамического качества при полёте самолёта в зоне турбулентности. Также показаны средние значения качества аэродинамического качества (математическое ожидание), среднеквадратическое отклонение (СКО) и дисперсия. Как видно из графиков, дисперсия в режиме полёта взлёт/посадка не больше 0.5, среднеквадратическое отклонение 0.67, среднее значение качества = 13.5. При полёте в крейсерском режиме СКО = 0.16, дисперсия = 0.03, среднее значение качества = 14,1.
Ранее было показано, чтобы уменьшить потребную скорость перекладки органов путевого управления, целесообразно изначально раскрыть расщепляющиеся элевоны. В исследовательских целях рассматривается начальное раскрытие на угол 5 = 40о. Но при увеличении угла раскрытия увеличивается и сопротивление самолёта, а значит, падает аэродинамическое качество.
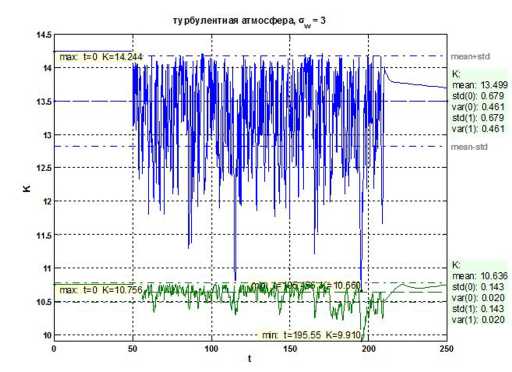
Рис. 19. Аэродинамическое качество (взлёт/посадка) при изначально раскрытых (зелёная линия) щитках и не раскрытых (синяя линия) щитках
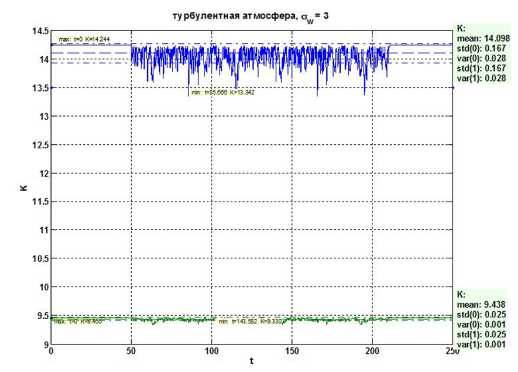
Рис. 20. Аэродинамическое качество (крейсер) при изначально раскрытых (зелёная линия) щитках, и не раскрытых (синяя линия) щитках
На рис. 19, 20 показаны изменения аэродинамического качества при изначально закрытых (синяя линия) и раскрытых (зелёная линия) щитках, при значениях aw = 3 м/с. Средние значения качества (математическое ожидание) на режиме взлёт/посадка отличаются на ^3 единицы (20%). В крейсерском полёте среднее аэродинамическое качество (К = 14.1) больше. На крейсерском режиме полёта начальное раскрытие щитков приводит к падению аэродинамического качества ^К ~ — 5. Также представлена зависимость аэродинамического качества самолёта по углу атаки, при разных раскрытиях щитков, без учёта турбулентности атмосферы. Как видно из рис. 21, при углах атаки а ~ 3 — 5О (крейсерский полёт) имеются существенные потери аэродинамического качества.
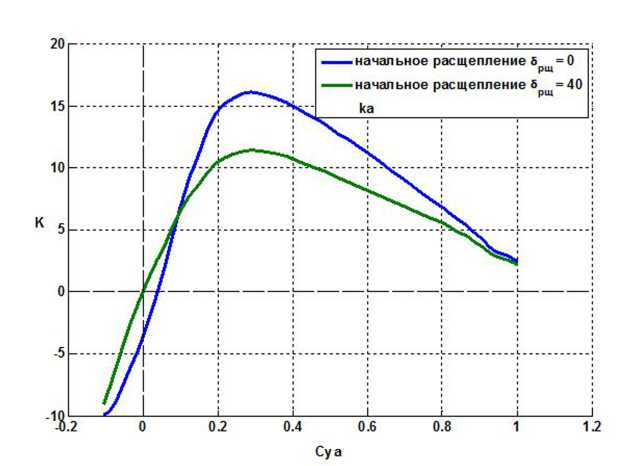
Рис. 21. Аэродинамическое качество при разных изначальных раскрытиях щитков
Анализируя потери качества, можно предположить, что для режима взлёт/посадка потери в 3 единицы аэродинамического качества приемлемы. То есть при взлёте/посадке, а именно при минимальных значениях скоростного напора, следует изначально расщеплять щитки, чтобы обеспечить приемлемую устойчивость и управляемость в путевом канале. Но на режимах, где аэродинамическое качество имеет важное значение и определяет ЛТХ самолета, например крейсерский полёт, необходимость в раскрытии щитков отсутствует, скорости перекладки достаточно и при не раскрытых щитках.
Список литературы Разработка алгоритмов системы управления самолёта схемы «летающее крыло»
- Гуськов Ю.П., Загайнов Г.И. Управление полётом самолётов: учебник для авиационных вузов. -М.: Машиностроение, 1980
- Бюшгенс Г.С., Студнев Р.В. Аэродинамика самолёта: Динамика продольного и бокового движения. -М.: Машиностроение, 1979
- Аэродинамика, устойчивость и управляемость сверхзвуковых самолётов/под ред. Г.С. Бюшгенса. -M.: Наука. Физматлит, 1998
