Разработка беспилотного авиационного комплекса для внесения средств защиты растений и удобрений

Автор: Ваняев Д.А., Косолапов В.В., Косолапова Е.В.
Журнал: Агротехника и энергообеспечение @agrotech-orel
Рубрика: Технологии, машины и оборудование для агропромышленного комплекса
Статья в выпуске: 4 (37), 2022 года.
Бесплатный доступ
В настоящее время беспилотные авиационные комплексы (БАК) используются повсеместно, в том числе и в сельском хозяйстве совместно с другими системами точного земледелия. Традиционный способ внесения жидких препаратов в почву с наземной техники имеет ряд недостатков, обусловленных невозможность работы после дождя, уничтожение от 4 до 8 % посевов на поле, сложность работы в поле неправильной конфигурации. Эти недостатки использования наземной техники фундаментальны и не устранимы. Данных недостатков лишены БПЛА, благодаря чему и находят широкое применение в сельском хозяйстве и являются перспективным направление в развитии точного земледелия, как для мониторинга состояния культур и их обработки, так и внесения удобрений. Однако аналитический обзор показал, что применяемые БПЛА имеют ряд недостатков, это ограничение по времени полёта, вследствие разряда аккумулятора, малая емкость бака для препаратов, что приводит к многократной заправке. В данной работе представлено обоснование и разработки беспилотного авиационного комплекса для внесения средств защиты растений и удобрений, обеспечивающая повышение эффективности использования энергетических, материальных и трудовых ресурсов за счет применения технологии самоорганизующегося роя БПЛА.
Точное земледелие, дроны, бак, бпла, самоорганизующийся рой, средства защиты растений, удобрения
Короткий адрес: https://sciup.org/147240727
IDR: 147240727 | УДК: 631.349:631.548
Development of unmanned aircraft complex for application of plant protection means and fertilizers
Currently, unmanned aerial systems (UAS) are used everywhere, including in agriculture in conjunction with other precision farming systems. The traditional method of applying liquid preparations to the soil from ground equipment has a number of disadvantages due to the impossibility of working after rain, the destruction of 4 to 8% of crops in the field, and the difficulty of working in a field with an incorrect configuration. These shortcomings in the use of ground technology are fundamental and cannot be eliminated. UAVs are deprived of these shortcomings, due to the fact that they are widely used in agriculture and are a promising direction in the development of precision farming, both for monitoring the state of crops and their processing, and for the contribution of fertilizer application. However, the prospective review showed that the UAV application has a number of disadvantages, such as detection by flight time, battery discharge detection, small capacity of the drug tank, which leads to multiple refueling. This paper presents the justification and development of an unmanned aerial complex for the application of plant protection products and fertilizers, which ensures an increase in the efficiency of the use of energy, material and labor resources through the use of self-organizing UAV technology.
Текст научной статьи Разработка беспилотного авиационного комплекса для внесения средств защиты растений и удобрений
Введение. Сегодня во всём мире завершается аналоговая эра, сельское хозяйство переходит в цифровую реальность. Применение инновационных технологий в аграрном секторе мировой экономики способно увеличить производство продукции на 70 % уже через пару десятилетий [5].
Благодаря быстрому развитию систем точного земледелия [2] и непрерывному развитию технологий сельскохозяйственному производителю стали доступны более технологичные средства обработки полей и рациональное использование имеющихся ресурсов. Уже сейчас стало возможным получать данные о всех технических и биологических сельскохозяйственных объектах, а значит более точно разрабатывать схему действий и предсказывать результат. К подобным технологиям относятся и новые инженерные системы обработки возделываемых культур средствами защиты и внесения жидких удобрений для питания растений направленные на повышение эффективности этих процессов.
Цель исследования. Проанализировать использование наземных и беспилотных авиационных комплексов для обработки возделываемых культур средствами защиты и внесения удобрений и разработать беспилотный авиационный комплекс, направленный на повышение эффективности использования энергетических, материальных и трудовых ресурсов в отрасли растениеводства на основании технологии самоорганизующег ося р оя 199
БПЛА.
Материалы и методы исследования. Работа построена на основании изученных научных публикаций, посвященных способам внесения жидких удобрений с помощью различной техники. В ходе работы применялись общенаучные методы - аналитический обзор, анализ, обобщение, моделирование.
Результаты исследования. Внесение жидких препаратов в период роста растений позволяет повысить урожайности культур. Это доказывается многочисленные исследования, проводимые Булавинцевым Р.А., Милюткиным В.А. [1, 3].
Для внесения удобрений широкое распространение получили опрыскиватели типа: самоходный (Барс ОС-2500М), прицепной (Amazone UR 3000), навесной (CLASS 1000), имеющих в своей конструкции базовое шасси, бак для жидкости, водяную помпу и штангу со шлангами и форсунками (рисунок 1).


Рисунок 1 - Самоходный и прицепной опрыскиватели
Однако применение данных устройств имеет ряд недостатков, вызванных необходимостью наличия большого парка агрегатов, при значительных обрабатываемых площадях, для выдерживания агротехнических сроков, проблем связанных с повреждением растений во время проходов сельскохозяйственной техники и прочее.
Одним из вариантов решения данных проблем является применение воздушной техники представленной пилотируемой авиацией и беспилотными авиационными системами (рисунок 2). При этом основной упор в настоящее время делается именно на втором варианте в виду отсутствия необходимости дорогостоящего содержания самого летательного аппарата, взлетно-посадочных полос и пилотов. Так, аппараты серии DJI Agras может позволить себе хозяйство средних размеров. С учетом того, что площадь среднего фермерского хозяйства может составлять в Центральной России до 60 га (на юге РФ они могут достигать 1000 га, однако все же средний показатель составляет 200 га или чуть более)[4], дроны могут достаточно эффективно выполнять свои задачи, тем более что в реальности общая территория для обработки может быть существенно меньше указанных выше параметров [6,8].


Рисунок 2 – Пилотируемая и беспилотная авиация
Главными недостатками [7] сельскохозяйственных авиационных дронов являются: существенное ограничение в размере бака, а следствие и объёму жидкости, ограничение времени полёта из-за разряда батареи. Данные два недостатка снижают производительность и эффективность всей системы.
Для решения данной проблемы предлагается применение системы внесения жидких минеральных удобрений с использованием цепочки квадрокоптеров состоящих из n-числа дронов связанных друг с другом шлейфом электропитания и шланга для подачи жидких удобрений с одной стороны, через равные промежутки, определяемые характеристиками распыляемого факела, и наземной станцией с другой, на которой расположены элементы питания, управления и подачи жидких удобрений. В роли наземной станции может выступать самоходное шасси перечисленных ранее агрегатов.
Требования к системе:
-
1. Система должна состоять из некоторого количества дронов, связанных между собой по принципу роя с возможностью автоматического поочередного взлета с наземной станции и распределения вдоль линии поля по рабочей ширине.
-
2. Дроны должны иметь внешний источник питания, непрерывно подающий заряд на расстоянии каждому квадрокоптеру.
-
3. Подача жидкости должна происходить из внешней емкости, перемещающейся параллельно с дронами.
-
4. Цепочка дронов может идти как с одной стороны наземной станции, так и с обеих, увеличивая рабочую ширину обработки поля.
Беспилотная авиационная система состоит из беспилотного воздушного судна и наземной станции. Роли беспилотных воздушных судов будет выполнять рой дронов, а наземной станции – самоходное шасси, генераторная установка для электропитания дронов, насосная установка, компьютеризированная система автоматического пилотирования.
Принципиальная схема предлагаемой системы представлена на рисунке 3 – система в транспортном состоянии и рисунке 4 – система в рабочем состоянии.
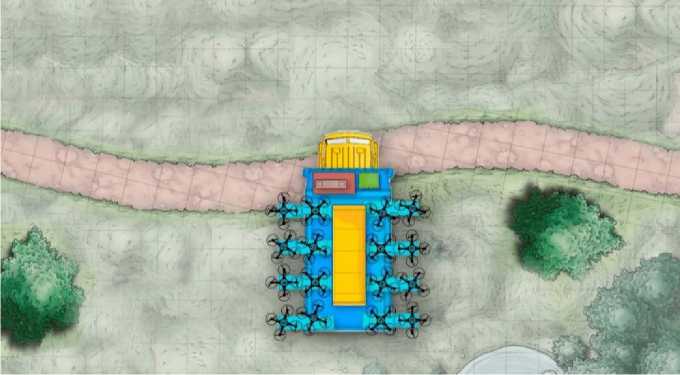
Рисунок 3 – Принципиальная схема предлагаемой системы в транспортном состоянии
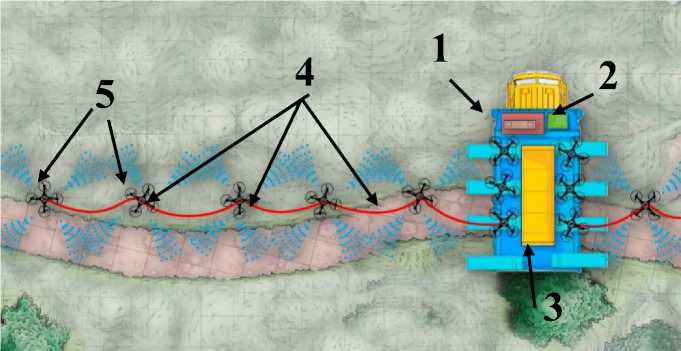
Рисунок 4 – Принципиальная схема предлагаемой системы в рабочем состоянии
-
1 – Генератор; 2 – Гидравлическая помпа; 3 – Бак для жидкости; 4 – питающий шлейф и шланг с жидкими удобрениями; 5 – дроны.
Принцип работы системы основан на передвижении наземной станции по краю поля или вдоль поля него, взлет роя дронов с посадочной платформы, автоматическое распределение дронов вдоль рабочей ширины, подача жидкого раствора по питающему шлангу, дозированная регулируемая подача раствопра через систему инжекторов на поверхность поля, автоматическое изменение ширины рабочей ширины (количества работающих дронов) в зависимости от контура поля. Давление в системе создаёт гидравлическая помпа, установленная на станции. Электрогенератор необходим для выработки энергии для работы дронов, которая передается по силовым проводам.
Для работы системы необходимо программное обеспечение для построения маршрута. В него оператором вносятся GPS координаты полёта или область полёта на карте, значения уровня распыления, скорости полёта и высоты.
«ROS система автономной работы» установленная на дронах принимая входные данные-координаты от «ПО для построения маршрута» следует им, отдавая команды «системе автопилота» каждого дрона по отдельности.
Схема работы системы внесения жидких удобрений показана на рисунке 7.

Рисунок 7 – Схема работы системы внесения жидких удобрений Визуальная модель предлагаемого решения представлена на рисунке 8.
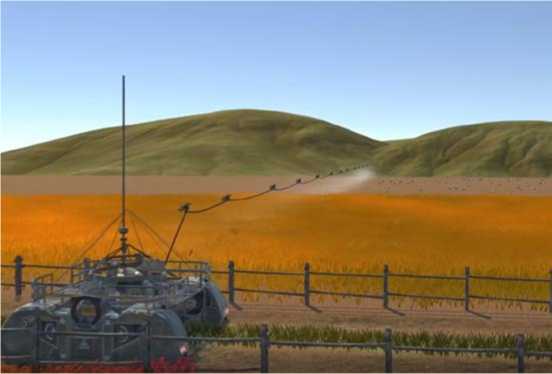
Рисунок 8 – Визуализация рабочего процесса предлагаемого решения
Выводы. Предложенное решение позволит обеспечить снижение затрат на ГСМ и время за счет снижения количества проходов агрегата, снизить расход количества рабочего раствора, за счет более интенсивного распыла, образуемого вихревыми потоками работающего дрона, исключить недостатки коротких полетов беспилотной авиации связанных с необходимостью замены замена АКБ или заправкой топливного бака. Квадрокоптеры в данном решении выступают в роли штанги, размах которой ограничен профилем почвы и количеством дронов. Это позволит увеличить ширину опрыскивания до 60 метров в каждую сторону и более (стандартная штанга суммарной шириной 25-30 метров). Исходя из этого следует снижение количества проходов и уменьшение антропогенного влияния на покров почвы и взращиваемых культур.
Список литературы Разработка беспилотного авиационного комплекса для внесения средств защиты растений и удобрений
- Булавинцев Р.А., Головин С.И., Полохин А.М., Волженцев А.В., Козлов А.В., Звеков А.В., Пупавцев И.Е. ИССЛЕДОВАНИЯ ЭФФЕКТИВНОСТИ ПРОВЕДЕНИЯ ПОДКОРМКИ ОЗИМОЙ ПШЕНИЦЫ // Вестник Курской государственной сельскохозяйственной академии. 2022. №2.
- Косолапова Е. В., Косолапов В. В. Астахова Т. Н. Беспилотная техника в сельском хозяйстве России и за рубежом /Перспективные направления развития отечественных информационных технологий материалы IV межрегиональной научно-практической конференции. Севастопольский государственный университет; науч. ред. Б.В. Соколов. Севастополь, 2018. С. 108-110.
- Милюткин Владимир Александрович, Шахов Владимир Александрович, Комарова Нина Константиновна, Длужевский Николай Григорьевич, Длужевский Олег Николаевич СОВЕРШЕНСТВОВАНИЕ ТЕХНОЛОГИИ ВОЗДЕЛЫВАНИЯ ПОДСОЛНЕЧНИКА С ПОВЫШЕНИЕМ УРОЖАЙНОСТИ И КАЧЕСТВА ПРОДУКЦИИ В ЗАСУШЛИВЫХ ПОЧВЕННО-КЛИМАТИЧЕСКИХ УСЛОВИЯХ // Известия ОГАУ. 2021. №1 (87).
- Мортикова А. С. ИНТЕРАКТИВНАЯ КАРТА ФЕРМЕРОВ // Столыпинский вестник. 2021. №4.
- Научно-обоснованный прогноз развития точного земледелия в России / Е. В. Рудой, М. С. Петухова, С. В. Рюмкин [и др.]. - Новосибирск: Золотой колос, 2021. - 138 с. - 978-5-94477-295-4.
- ISBN: 978-5-94477-295-4 EDN: BLJFAQ
- Симдянкин А. А., Борычев С. Н., Успенский И. А., Каширин Д. Е., Юхин И. А. ПОВЫШЕНИЕ ЭНЕРГОЭФФЕКТИВНОСТИ ДРОНОВ В СЕЛЬСКОХОЗЯЙСТВЕННОМ ПРОИЗВОДСТВЕ // Известия НВ АУК. 2022. №1 (65).
- Усмонов, Ботир Шукуриллаевич, Дадабоева, Дилноза Иркиновна, Хакимова, Малика Уктам Кизи БЕСПИЛОТНОЕ ЛЕТАТЕЛЬНОЕ УСТРОЙСТВО В СЕЛЬСКОМ ХОЗЯЙСТВЕ // ORIENSS. 2022. №6.
- Чуба Александр Юрьевич, Чуба Андрей Юрьевич Использование беспилотных авиационных систем в сельском хозяйстве // Известия ОГАУ. 2019. №3 (77).
