Разработка имитационных моделей для исследования систем с вероятностными взаимодействиями элементов

Автор: Емельянов А.Е., Битюков В.К.
Журнал: Вестник Воронежского государственного университета инженерных технологий @vestnik-vsuet
Рубрика: Информационные технологии, моделирование и управление
Статья в выпуске: 3 (77), 2018 года.
Бесплатный доступ
Одним из актуальных направлений теоретических и экспериментальных исследований является анализ, моделирование и синтез технических систем с вероятностными взаимодействиями элементов. Работа посвящена разработке имитационных моделей для исследования одного класса таких систем – сетевых систем управления. В качестве каналов передачи данных в таких системах используются промышленные или общедоступные цифровые компьютерные сети. Использование компьютерных сетей в системах управления приводить к новым проблемам: случайная временная задержка в процессе передачи, вероятная потеря пакета данных, возможность асинхронной работы элементов системы. Не учет этих факторов может привести к потере устойчивости системы управления. Для исследования указанных проблем предлагается использовать имитационные модели соответствующих систем управления. В работе разработаны имитационные модели для цифровой системы управления без запаздывания в канале передачи, сетевой системы управления с сетевым каналом связи между датчиком и контроллером...
Система, управление, вероятность, взаимодействие, канал, сеть
Короткий адрес: https://sciup.org/140238683
IDR: 140238683 | DOI: 10.20914/2310-1202-2018-3-63-69
Development of simulation models for the study of systems with probabilistic interactions of elements
One of the topical areas of theoretical and experimental research is the analysis, modeling and synthesis of technical systems with probabilistic interactions of elements. The work is devoted to the development of simulation models for the study of one class of such systems - network management systems. As data transmission channels, such systems use industrial or public digital computer networks. The use of computer networks in control systems leads to new problems: random time delay in the transmission process, the likely loss of the data packet, the possibility of asynchronous operation of the elements of the system. Not taking these factors into account can lead to a loss of sustainability of the management system. To study these problems, it is proposed to use simulation models of appropriate control systems. In the work, simulation models for a digital control system without delay in the transmission channel, a network management system with a network communication channel between the sensor and the controller have been developed...
Текст научной статьи Разработка имитационных моделей для исследования систем с вероятностными взаимодействиями элементов
В настоящее время в научных и экспериментальных исследованиях большое внимание уделяется анализу, моделированию и синтезу технических систем с вероятностными взаимодействиями элементов [1–5]. В частности, к таким системам можно отнести системы управления с вероятностными каналами передачи информации. В качестве каналов передачи могут выступать цифровые сети (промышленные и общедоступные), по которым информация передается в виде пакетов данных [6–8]. В литературе такие каналы передачи получили название сетевых каналов, а системы – сетевые
системы управления (Networked Control System(NCS)) [9, 10]. Применение сетевых каналов в системах управления имеет ряд преимуществ: снижение затрат на монтажные работы, конфигурация системы, простота диагностики и обслуживания. Однако использование вероятностного (сетевого) канала передачи приводит к ряду новых проблем: случайная временная задержка в процессе передачи, вероятная потеря пакета данных, возможность асинхронной работы элементов системы. Неучет этих факторов может привести к потере устойчивости системы управления.
Традиционный подход к синтезу таких систем не позволяет решить эти проблемы. Это связано с тем, что анализ систем управления с вероятностными каналами передачи информации требует использования методов и подходов как теории управления, так и теории связи. Этот факт значительно усложняет анализ, моделирование и синтез таких систем управления [10].
В данной работе показана разработка имитационных моделей для исследования систем с вероятностными взаимодействиями элементов и бесконечно большим буфером данных.
Математическое моделирование
Моделирование сетевой системы управления проводится в предположении, что пакеты данных в системе не теряются. С этой целью используется бесконечно большой буфер для пакетов данных. Моделирование ведется в сравнении с цифровой системой управления без запаздывания.
Моделирование цифровой системы управления
На рисунке 1 представлена функциональная схема цифровой системы управления.
Данная система функционирует следующим образом. Цифровой датчик считывает значения выходного сигнала y(t) объекта регулирования в моменты времени t = kТ0, где Т0 – такт квантования цифровым датчиком выхода объекта регулирования. Полученные данные y(kТ0) цифровым датчиком отправляются на контроллер. Контроллер вырабатывает регулирующее воздействие u(kТ0) по определенному закону с учетом задающего воздействия r(kТ0) и полученных данных от датчика y(kТ0). Регулирующее воздействие u(kТ0) передается на исполнительное устройство в моменты времени t = kТ0. Регулирующее воздействие исполнительным устройством реализуется на объекте регулирования u(t). При этом считается, что передача сигналов и обработка данных осуществляется мгновенно. Так, если данные цифровым датчиком получены в момент времени t = kТ0, то они будут учтены при выработке регулирующего воздействия контроллером, которое будет передано на исполнительное устройство также в момент времени t = kТ0.
В дальнейшем дискретные переменные, такие, как y(kТ 0 ), u(kТ 0 ), r(kТ 0 ) и другие, для упрощения записи будем представлять в виде: у k , u k , r k .
Для простоты будем считать, что характеристики цифрового датчика и исполнительного устройства не влияют на процесс регулирования системы. Поэтому примем, что цифровой датчик и исполнительное устройство соответствуют безынерционным элементам с единичным коэффициентом усиления.
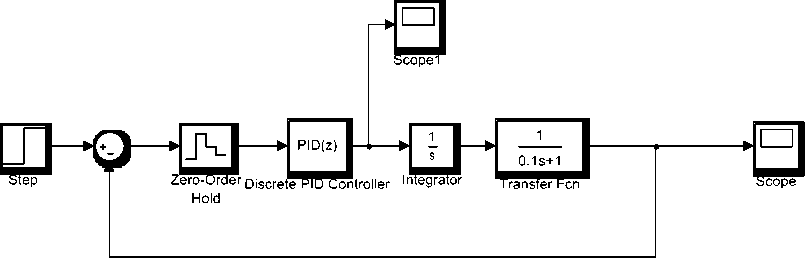
В качестве объекта регулирования был выбран двигатель постоянного тока (сервопривод). В качестве контроллера – дискретный ПИД-регулятор.
Моделирование функционирования цифровой системы управления было проведено в среде Simulink системы Matlab.
На рисунке 2 представлена схема моделирования цифровой системы управления.
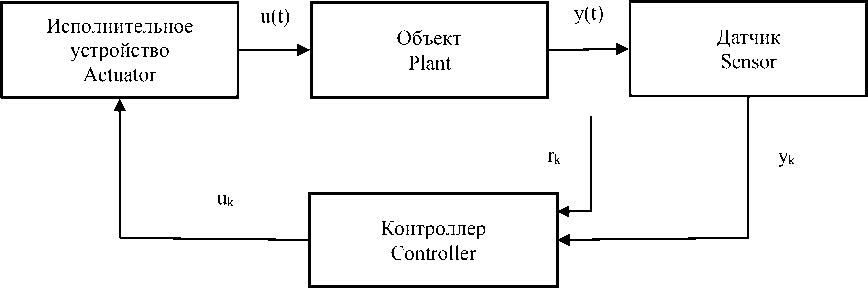
Рисунок 1. Цифровая система управления
Figure 1. DigitalControlSystem
Рисун . р р у р
Figure 2. Digital Control System Simulation Diagram
Моделирование системы управления с малым временем запаздывания в сетевом канале
На рисунке 3 представлена функциональная связи и малым временем передачи данных. Будем считать, что цифрой датчик и дискретный регулятор работают синхронно, а время запаздывания передачи данных по сетевому каналу τk ≤ Т0.
схема системы управления с сетевым каналом
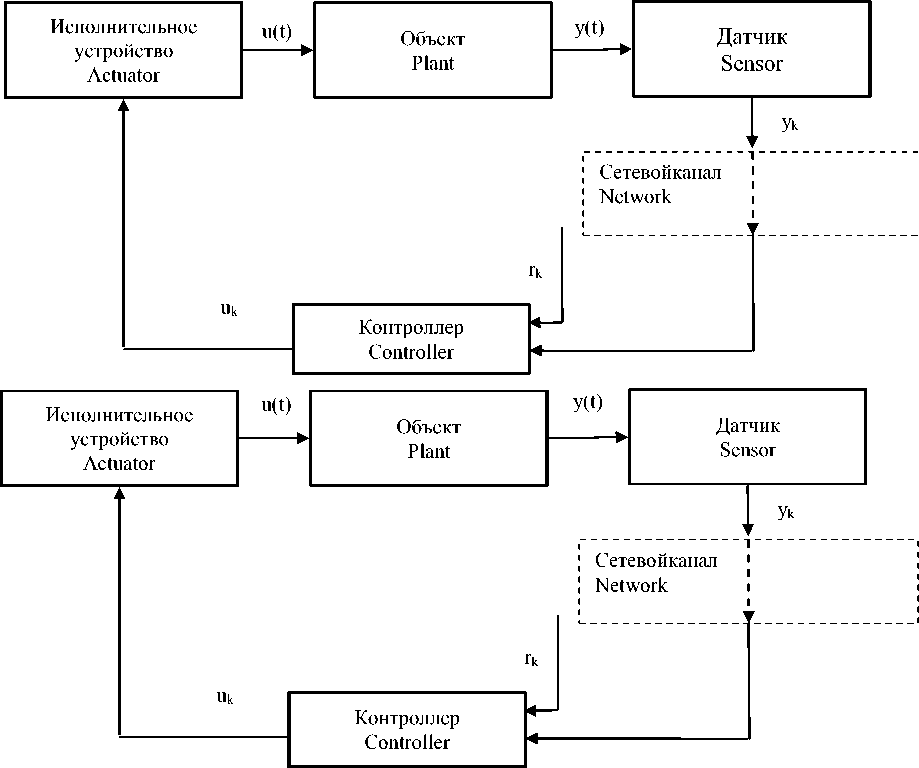
Рисунок 3. Система управления с сетевым каналом передачи
Figure 3. Control system with network transmission channel
В этом случае, когда бы ни пришли данные от цифрового датчика, они будут реализованы в регулирующем воздействии только на следующем такте квантования. Таким образом, данная система будет работать как рассмотренная выше цифровая система, но только с запаздыванием на один такт квантования Т0 в линии обратной связи.
На рисунке 4 представлена схема моделирования системы управления с малым временем запаздывания в сетевом канале передачи данных от цифрового датчика к дискретному регулятору.
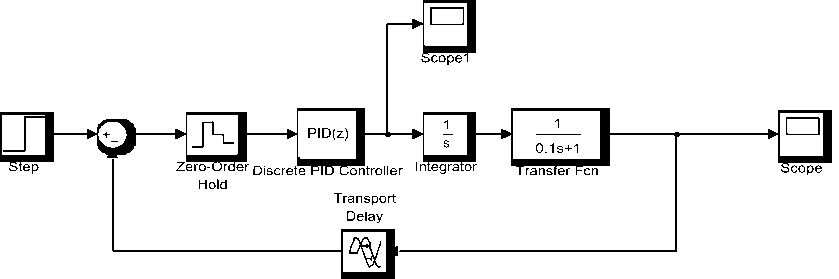
Рисунок . хема моделирования системы управления с малым временем запаздывания в сетевом канале
Figure 4. A simulation scheme for a control system with a short time lag in a network channel Моделирование системы управления с большим временем запаздывания в сетевом канале
На рисунке 5 представлена схема системы управления с сетевым каналом связи и буферами для пакетов данных.
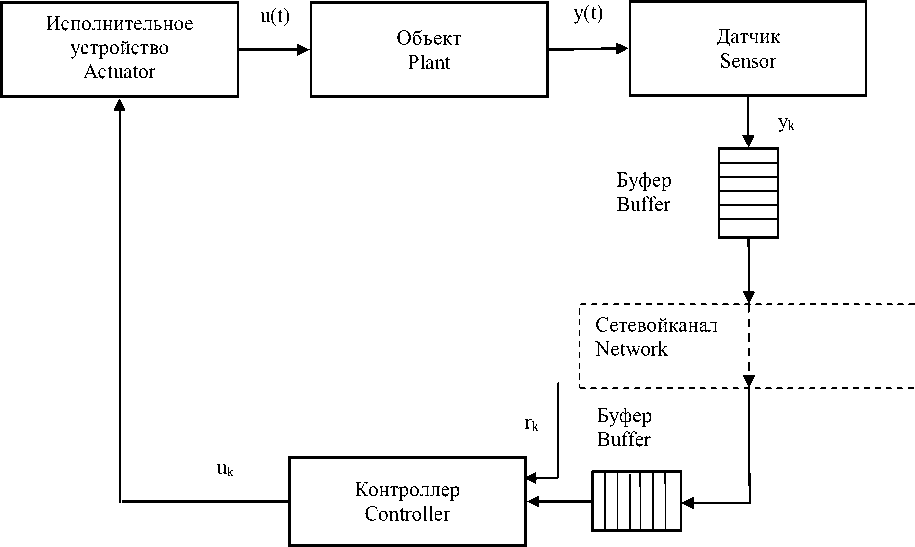
Рисунок 5. Система управления с сетевым каналом связи и буферами для пакетов данных Figure 5. Control system with network communication channel and buffers for data packets
Данная система работает следующим образом. Цифровой датчик считывает выходной сигнал объекта регулирования в моменты времени t = kТ0. Если канал «открыт», то цифровой датчик сразу передает данные на дискретный регулятор. Если канал «закрыт», т. е. передача данных по нему невозможна, в течение такта квантования Т0, то пакет данных помещается в буфер. Таким образом, если канал будет «закрыт» продолжительное время, в течение нескольких тактов квантования Т0, то в буфере датчика будет находиться соответствующее количество пакетов данных. Будем считать, что как только сетевой канал будет «открыт», т. е. передача данных по нему станет возможной, все пакеты данных из буфера датчика будут перемещены в буфер дискретного регулятора. Дискретный регулятор последовательно обрабатывает поступающие данные от датчика: в момент времени t = kТ0 обрабатывается только один пакет данных, который поступил первым, остальные находятся в очереди. Объем буферов датчика и регулятора считается неограниченным. Предполагается, что датчик и регулятор работают синхронно: квантование датчика и регулятора осуществляется с одинаковым тактом квантования Т0 и в один и тот же момент времени t = kТ0.
Отметим следующие определения. Сетевой канал является «закрытым», если передача данных в течение такта квантования Т 0 по нему невозможна. Сетевой канал является «открытым», если по нему возможна передача данных в течение такта квантования Т 0 . Запаздыванием в сетевом канале передачи данных называется промежуток времени, в течение которого передача данных по нему невозможна. По сути, запаздывание в сетевом канале передачи данных, это время, в течение которого канал является «закрытым». Запаздыванием в системе управления называется промежуток времени с момента формирования пакета данных в цифровом датчике до момента его переработки в дискретном регуляторе. Понятно, что запаздывание в системе управления складывается из времени ожидания пакета данных в буферах цифрового датчика и дискретного регулятора до момента его обработки.
Информационным потоком системы управления с сетевыми каналами связи называется поток данных, поступающих непосредственно на переработку от одних элементов системы к другим. При этом поступившие данные могут некоторое время находиться в буфере, ожидая своей очереди переработки данным элементом системы. Разрывом информационного потока называется случай, когда дискретный регулятор не имеет данных от цифрового датчика, которые не были бы уже использованы, для выработки регулирующего воздействия. Временем разрыва информационного потока называется промежуток времени, в течение которого наблюдался разрыв информационного потока в системе управления. Система управления с сетевыми каналами связи является замкнутой, если в ней не наблюдается разрыва информационного потока, в противном случае, система является разомкнутой.
Таким образом, может возникнуть следующая ситуация: сетевой канал передачи данных «закрыт», но в свете введенного выше определения система управления будет считаться замкнутой, а информационный поток – непрерывным, если в буфере дискретного регулятора будут данные от цифрового датчика, которые еще не были обработаны.
В некоторый момент времени в системе может сложиться следующая ситуация:
-
• сетевой канал «закрыт»;
-
• буфер регулятора пуст;
-
• буфер датчика имеет пакеты данных от цифрового датчика.
Тогда на следующем такте квантования:
-
• новые данные от цифрового датчика будут помещены в буфер датчика;
-
• регулятор для выработки регулирующего воздействия будет использовать последние полученные данные от цифрового датчика, которые были уже использованы.
Рассмотренный выше случай функционирования системы управления с сетевым каналом связи приводит к разрыву информационного потока. В результате время запаздывания в системе увеличится на время разрыва информационного потока.
Когда сетевой канал «открывается», то пакеты данных из буфера цифрового датчика в течение такта квантования Т 0 перемещаются в буфер дискретного регулятора.
Анализ функционирования такой системы показывает, что разрыв информационного потока наблюдается, когда текущее время запаздывания в сетевом канале передачи данных становится больше времени запаздывания в системе управления, которое наблюдалось до этого момента времени.
Это можно сформулировать иначе: разрыв информационного поток наблюдается в том случае, когда число последовательных тактов квантования Т 0 , в течение которых сетевой канал находится в состоянии «закрыт», превышает максимальное число аналогичных тактов, наблюдавшихся до этого момента времени.
На рисунке 6 представлена схема моделирования рассматриваемой системы.
На этой схеме предусмотрены модули:
-
• формирования дискретного случайного процесса ξ k «закрытия-открытия» сетевого канала:
-
1, канал закрыт - вероятность p ;
-
0, канал открыт - вероятность q = 1 - p .
^ k = ^ kT o ) = {
С этой целью используется блок формирования случайного числа, имеющего равномерное распределение. Вероятность p задается путем установки соответствующего значения в управляемом переключателе Switch;
-
• формирования числового значения времени закрытия канала передачи в тактах квантования.
С этой целью формируется дискретный случайный процесс:
-
8 k + i = ( 8 k + 1 ) - ^ k ;
где ε k – число последовательных тактов квантования «закрытия» сетевого канала на момент времени t =kТ 0 .
Для реализации данного случайного процесса используется интегрирующий блок. Пока ξ k =1, выход интегратора возрастает, если ξ k =0, то выход интегратора обнуляется. Условие такого перехода задается в управляемом переключателе Switch.
-
• формирования максимального значения времени «закрытия» сетевого канала в тактах квантования за время работы системы управления;
С этой целью формируется дискретный случайный процесс:
max max
8 k + i = 8 k + i • 1 [_ 8 k + i - 8 k J"
max max
+ 8 k ( 1 - 1_ 8 k + i - 8 k J ) ;
max
где 8 k
–
максимальное значение времени
«закрытия» сетевого канала в тактах квантования
на момент времени t = кТ о ; 1 ^ 8к+х
^
ничная функция (значение 1, если в противном случае – 0).
Для реализации данного
max
8 к J - еди-
max
8 k + i ^ 8 k ,
случайного
процесса используется блок MinMax.
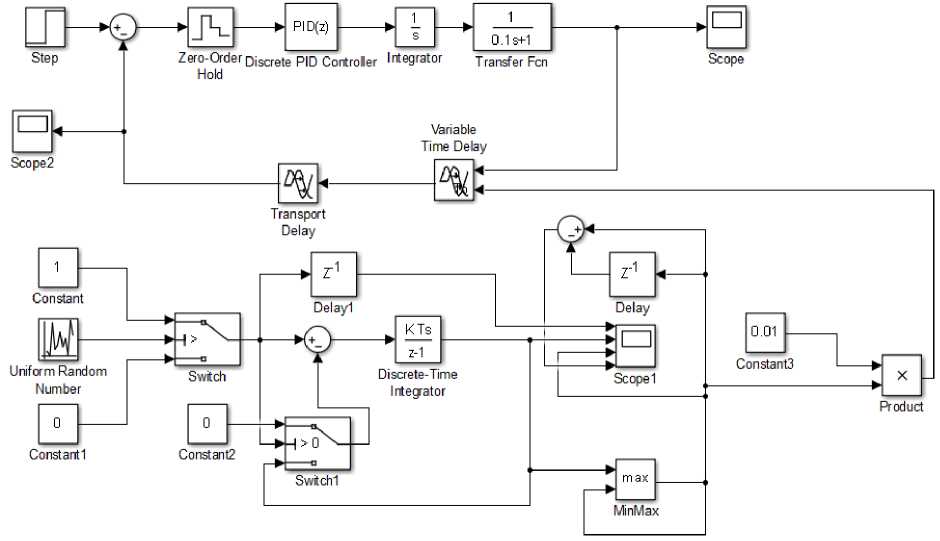
Рисунок 6. Схема моделирования системы управления с бесконечно большим буфером
Figure 6. A simulation scheme for a control system with an infinitely large buffer
-
-
• формирования времени разрыва информационного потока в тактах квантования.
С этой целью формируется дискретный случайный процесс: p max max
Zk = 8 k - 8 k -i.
В момент, когда наступает разрыв информационного потока, £P p = 1 и это значение удерживается в течение всего времени разрыва.
Функционирование рассматриваемой системы управления моделируется следующим образом:
-
1. в цепи обратной связи имеются два элемента временной задержки: Transport Delay – предназначен для моделирования запаздывания на
-
2. если в системе не наблюдается разрыв информационного потока, то система работает с постоянным запаздыванием в цепи обратной связи;
-
3. если в системе наблюдается разрыв информационного потока, то значение запаздывания в блоке VariableTimeDelay увеличивается на время разрыва информационного потока;
-
4. в течение разрыва информационного потока система работает в разомкнутом состоянии; после окончания разрыва информационного потока система работает с новым значением запаздывания в цепи обратной связи.
1 такт квантования Т 0 , что связано с особенностями сетевой системы управления; Variable Time Delay – предназначен для моделирования временной задержки, определяемой количеством пакетов данных в буфере элементов системы;
Заключение
В работе показаны подходы к математическому и имитационному моделированию для исследования систем с вероятностными взаимодействиями элементов. На основании данных подходов разработаны имитационные
Список литературы Разработка имитационных моделей для исследования систем с вероятностными взаимодействиями элементов
- Абрамов Г.В., Емельянов А.Е., Колбая К.Ч. Анализ времени передачи данных в распределенных сетях с конкурирующим доступом//Вестник ВГУ. 2016. № 4. С. 61-67.
- Битюков В.К., Емельянов А.Е. Модель канала передачи со случайной задержкой и потерей пакетов данных для сетевых систем управления//Вестник ВГУИТ. 2015. № 3. С. 68-73.
- Burger M., Zelazo D., Allgower F. Hierarchical clustering of dynamical networks using a saddle-point analysis/IEEE Transactions on Automatic Control. 2013. V. 58. P. 113-124.
- Chen X., Hao F. Periodic event-triggered state-feedback and output-feedback control for linear systems. Control, Automation and Systems. 2015. V. 13. № 4. P. 779-787.
- Fuhrmann P.A., Helmke U. Reachability, observability and strict equivalence of networked linear systems. Mathematics of Control Signals and Systems. 2013. № 2. P. 299-306.
- Gommans T., Antunes D., Donkers T., Tabuada P., Heemels W. Self-triggered linear quadratic control. Automatica. 2014. V. 50. № 4. P. 1279-1287.
- Hua M.-D., Hamel T., Morin P., Samson C. Introduction to Feedback Control of Underactuated VTOL Vehicles: A Review of Basic Control Design Ideas and Principles. IEEE Control Systems. 2013. V. 33. № 1. P. 61-75.
- You K.-Y., Xie L.-H. Survey of Recent Progress in Networked Control Systems. ActaAutomaticaSinica. 2013. V. 39. № 2. P. 101-117.
- Wu H. Cloud-Based Net -worked Visual Servo Control. IEEE Transactions on Industrial Electronics. 2013. V. 60. P. 554-566.
- Zhang L. Network-Induced Constraints in Networked Control Systems -A Survey. IEEE Transactionson IndustrialInformatics. 2013. V. 9. P. 403-416.
