Разработка интеллектуальной весовой платформы для проведения бонитировочных работ

Автор: Павкин Дмитрий Юрьевич, Юрочка Сергей Сергеевич, Хакимов Артем Рустамович, Довлатов Игорь Мамедяревич
Журнал: Агротехника и энергообеспечение @agrotech-orel
Рубрика: Технологии и средства механизации сельского хозяйства
Статья в выпуске: 3 (36), 2022 года.
Бесплатный доступ
Разработка интеллектуальной весовой платформы проводилась с учетом необходимости интегрировать ее в общую систему фермы. Перед изготовлением платформы была создана точная трехмерная модель с помощью конструкторского программного обеспечения Kompas 3D. Перед проектированием прототипа был проведен прочностной расчет. Каркас и узлы прототипа сконструированы на основе труб марки стали СТ20. В изготовлении прототипа использовались трехмерные TOF камеры технического зрения (с встроенной инфракрасной подсветкой 850 нм и разрешением 352х264 пикселей), шланги, трубы, листы, система тензометрических датчиков (где датчики весоизмерительные тензорезисторного типа имеют входное сопротивление Ом 400 ± 20, выходное сопротивление Ом 352±2). Представлена трехмерная модель устройства, разработанная на основе эскизной конструкторской документации прототипа интеллектуальной системы. В соответствии с разработанной конструкторской документацией был изготовлен прототип интеллектуальной системы.
Цифровизация фермы, бонитировка, корова, весовые параметры, весовая платформа
Короткий адрес: https://sciup.org/147239795
IDR: 147239795 | УДК: 636.082.22:637.513.5:004.8
Development of an intelligent weighing platform for appraisal work
The development of an intelligent weighing platform was carried out taking into account the need to integrate it into the overall farm system. Before fabrication of the platform, an accurate 3D model was created using the Kompas 3D design software. Before designing the prototype, a strength calculation was carried out. The frame and nodes of the prototype are designed on the basis of pipes of steel grade CT20. In the manufacture of the prototype, three-dimensional TOF vision cameras were used (with built-in infrared illumination of 850 nm and a resolution of 352x264 pixels), hoses, pipes, sheets, a system of strain gauges (where load cells of the strain gauge type have an input resistance of 400 ± 20 Ohm, an output resistance of 352 ± 2 Ohm). A three-dimensional model of the device is presented, developed on the basis of the draft design documentation of the prototype of the intelligent system. In accordance with the developed design documentation, a prototype of the intelligent system was made.
Текст научной статьи Разработка интеллектуальной весовой платформы для проведения бонитировочных работ
Введение. Автоматизация бонитировочных работ является необходимым этапом цифровизации молочных ферм. Взвешивание и получение весовых параметров необходимо для оценки физиологического состояния КРС [1, 2, 3]. Здоровые животные необходимы для наращивания производства животноводческой продукции, в частности молока и молочных продуктов [4, 5]. Полноценное и сбалансированное кормление необходимо для обеспечения роста и развития согласно генетической программе вида [6, 7]. Вычисление весовых параметров необходимо проводить регулярно, ведя точную статистику изменения состояния животных. Для точного измерения параметров необходимо учитывать все параметры, влияющие на точность измерения, например, налипание грязи на тело (навал) или расположение животного на весовой платформе. Система автоматизированного контроля живой массы и диагностики состояния здоровья коров позволяет своевременно обнаружить отклонения живой массы животного от ее среднестатистических показателей, оценить его физиологическое состояние и степень биологической активности [8].
Разработка интеллектуальной весовой платформы проводилась с учетом необходимости интегрировать ее в общую систему фермы [9, 10, 11]. При проектировании интеллектуальной весовой платформы были поставлены следующие цели:
-
1. Разработать платформу, отвечающую требованиям безопасности при работе с КРС;
-
2. Обеспечить мобильность разрабатываемой системы, позволяющей перемещать весовую платформу между фермами;
-
3. Обеспечить возможность интеграции системы управления интеллектуальной 52 Агротехника и энергообеспечение. – 2022. – № 3 (36)
весовой платформы с системами обработки результатов бонитировочных работ.
Материалы и методы. Проектирование интеллектуальной весовой платформы осуществлялось с применением конструкторского программного обеспечения. Эскизная конструкторская документация содержит все узлы разработанной системы. Перед изготовлением платформы была создана точная трехмерная модель с помощью конструкторского программного обеспечения Kompas 3D.
Перед проектированием прототипа был проведен прочностной расчет. Расчету подлежала весовая платформа. Конструкция весовой платформы рассчитывалась под быка, весом 1200 кг. По результатам проведенного прочностного исследования установлено, что при совокупной нагрузке необратимой деформации металла не происходит. Платформа выдержит животное с весом 1200 кг.
Каркас и узлы прототипа сконструированы на основе труб марки стали СТ20. Ворота, весовая платформа, боковые стенки, пандусы и верхние крепежные элементы собраны методом сварки. Между собой элементы закрепляются на болтовые соединения. Разработанная интеллектуальная весовая платформа имеет прямоугольную форму и выполнена в виде проходного станка. Ворота автоматические на вход и на выход.
В изготовлении прототипа использовались трехмерные TOF камеры технического зрения (с встроенной инфракрасной подсветкой 850 нм и разрешением 352х264 пикселей), шланги, трубы, листы, система тензометрических датчиков (где датчики весоизмерительные тензорезисторного типа имеют входное сопротивление Ом 400 ± 20, выходное сопротивление Ом 352±2). В процессе взвешивания животные постоянно двигаются, поэтому вычислить их реальную массу можно только весами, оснащенными функцией удержания и усреднения веса. Тензометрические датчики были выбраны как наиболее эффективные на основании литературного исследования [12, 13]. Для управления элементами разработанной системы использовался панельный компьютер с установленной системой Windows 10 (64 бит), объёмом оперативной памяти 4 Гб, с установленным жестким диском на 250 Гб, частота процессора 1,99 ГГц.
Результаты и обсуждение. Трехмерная модель устройства, разработанная на основе эскизной конструкторской документации прототипа интеллектуальной системы представлена на рисунке 1. Все элементы конструкции расположены для обеспечения безопасной работы платформы в условиях фермы.

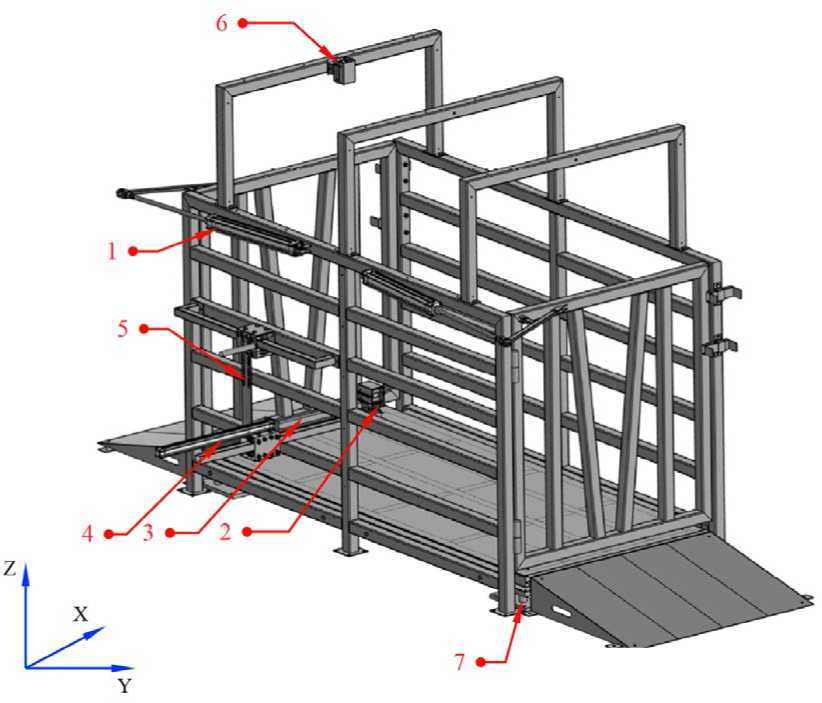
Рисунок 1 – Разработанная 3D модель на основе эскизной конструкторской документации прототипа интеллектуальной системы
Ворота прототипа управляются за счет пневмоцилиндров 1. Трехмерный датчик 2 для сканирования сосков вымени коровы установлен на телескопической направляющей 3, которая приводится в движение пневмоцилиндром 4. Телескопическая направляющая выполняет поставленную перед ней задачу – перемещение трехмерного датчика к вымени коровы и обратно. Крепление трехмерного датчика над крестцом коров производится за счет труб. Трехмерные датчики помещены в металлический каркас с прозрачным стеклом. Кронштейн 5 обеспечивает перемещения модуля камеры измерения роста животных. 3D-TOF камера 6 определяет параметры животного сверху. Для весовой платформы подобраны тензометрические датчики 7 балочного типа, с рабочей нагрузкой на каждый 2,5 т, с классом точности С3.
В соответствии с представленной габаритной схемой и конструкторской документацией габариты прототипа не превышают 2700х1600х2200 мм (длина, ширина, высота). Транспортировочные габариты прототипа составляют 2500х1564х2118 мм. Вес изготовленной системы составляет ориентировочно 620-640 кг.
В соответствии с разработанной конструкторской документацией был изготовлен прототип интеллектуальной системы (рисунок 2).

Рисунок 2 – Прототип весовой платформы
Прототип изготовлен из труб марки стали СТ 20. Ворота собраны сварным методом. Все металлические изделия, выполнены из стали СТ 20 покрыты антикоррозионным веществом серого и красного цвета. В изготовлении прототипа использовались трехмерные TOF камеры технического зрения, шланги, трубы, листы, система тензометрических датчиков.
Выводы.
Перед изготовлением платформы была создана точная трехмерная модель с помощью конструкторского программного обеспечения Kompas 3D.
Для прототипа был проведен прочностной расчет и на его основе выбраны трубы марки стали СТ20.
Представлена трехмерная модель устройства, разработанная на основе эскизной конструкторской документации прототипа интеллектуальной системы.
Разработана конструкторская документация и был изготовлен прототип интеллектуальной весовой платформы.
Разработка интеллектуальной весовой платформы провели с учетом необходимости интегрировать ее в общую систему фермы.
Работа выполнена при поддержке Совета по грантам Президента Российской Федерации на право получения гранта Президента Российской Федерации для государственной поддержки молодых российских ученых – кандидатов наук – МК-2513.2022.4.
Список литературы Разработка интеллектуальной весовой платформы для проведения бонитировочных работ
- Косилов, В. И. Весовые параметры коров-первотёлок чёрно-пёстрой, голштинской пород и их помесей / В. И. Косилов, Б. Т. Кадралиева // Известия Оренбургского государственного аграрного университета. – 2020. – № 6(86). – С. 299-301.
- Вильвер, Д. С. Влияние энергетической кормовой добавки на изменчивость показателей молочной продуктивности коров чёрно-пёстрой породы / Д. С. Вильвер, А. А. Фомина // Известия Оренбургского государственного аграрного университета. – 2017. – № 1(63). – С. 140-142.
- Косилов, В. И. Потребление и использование кормов и энергии рациона тёлками чёрно-пёстрой породы и её помесями / В. И. Косилов, Е. А. Никонова, А. Г. Джалов // Известия Оренбургского государственного аграрного университета. – 2016. – № 4(60). – С. 124-127.
- Новые технологические методы повышения молочной продуктивности коров на основе лазерного излучения / Н. К. Комарова, В. И. Косилов, Е. Ю. Исайкина, Е. А. Никонова. – Оренбург: Издательский центр ОГАУ, 2015. – 192 с.
- Влияние пробиотической кормовой добавки Биодарин на рост и развитие телок симментальской породы / В. Г. Литовченко, С. С. Жаймышева, В. И. Косилов [и др.] // АПК России. – 2017. – Т. 24. – № 2. – С. 391-396.
- Гудыменко, В. В. Перспективы использования трёхпородного скрещивания в скотоводстве / В. В. Гудыменко // Известия Оренбургского государственного аграрного университета. – 2012. – № 6(38). – С. 116-118.
- К 10. Крылов, В. Н. Показатели крови молодняка казахской белоголовой породы и ее помесей со светлой-аквитанской / В. Н. Крылов, В. И. Косилов // Известия Оренбургского государственного аграрного университета. – 2009. – № 2(22). – С. 121-125.
- Краусп, В. Р. Контроль живой массы и диагностика состояния здоровья крупного рогатого скота / В. Р. Краусп, Г. А. Харатян // Инновации в сельском хозяйстве. – 2016. – № 6(21). – С. 46-51.
- Модуль базовой станции приема-передачи данных физиологического состояния КРС / В. В. Кирсанов, Д. Ю. Павкин, И. М. Довлатов, В. А. Жмылев // Агроинженерия. – 2022. – Т. 24. – № 1. – С. 28-34.
- Довлатов, И. М. Разработка энергоэффективной системы микроклимата для беспривязного содержания дойного стада / И. М. Довлатов, С. С. Юрочка // Сельскохозяйственные машины и технологии. – 2021. – Т. 15. – № 3. – С. 73-80.
- Довлатов, И. М. Блок автоматики устройства автоматического обеззараживания воздуха и контроля времени освещения в птичниках / И. М. Довлатов, Ю. А. Прошкин // Агротехника и энергообеспечение. – 2019. – № 2(23). – С. 82-90.
- Ашикпаева, С. И. Тензодатчики как основа весов для взвешивания КРС / С. И. Ашикпаева, А. Е. Тажкұран, Л. Н. Алпыспаева // Проблемы методологии и опыт практического применения синергетического подхода в науке: сборник статей по итогам Международной научно-практической конференции, Самара, 13 ноября 2018 года. – Самара: Общество с ограниченной ответственностью "Агентство международных исследований", 2018. – С. 119-121.
- Ходякова, Е. Весы для животных: взвешенный выбор / Е. Ходякова // Эффективное животноводство. – 2021. – № 6(172). – С. 74-77.
