Разработка маломощной onboard-системы точечной детекции фитопатологий пшеницы с применением модифицированной YOLO-архитектуры

Автор: Мударисов С.Г., Мифтахов И.Р., Фархутдинов И.М., Шафеева Э.И.
Журнал: Инженерные технологии и системы @vestnik-mrsu
Рубрика: Технологии, машины и оборудование
Статья в выпуске: 1, 2026 года.
Бесплатный доступ
Введение. Ранняя диагностика фитопатологий зерновых культур является одной из ключевых задач точного земледелия, поскольку позднее выявление заболеваний приводит к существенным потерям урожайности и неэффективному применению средств защиты растений. Существующие системы фитосанитарного мониторинга в основном ориентированы на постобработку данных и требуют значительных вычислительных ресурсов, что ограничивает их применение на борту беспилотных летательных аппаратов. В этой связи актуальной научной задачей является обеспечение высокоточной диагностики заболеваний растений в реальном времени в условиях жестких вычислительных и энергетических ограничений бортовых платформ. Цель исследования. Разработка энергоэффективной onboard-системы детекции болезней пшеницы, способной к работе в реальном времени на встраиваемых платформах. Материалы и методы. Объект исследования – посевы пшеницы в условиях открытого грунта. В качестве аппаратной основы использовались вычислительные модули Jetson TX2, NavQ Plus и Raspberry Pi 4. Для построения модели применена модифицированная архитектура YOLO с интеграцией малозатратных сверточных блоков (GhostConv, MBConv), модулей внимания (SE, CBAM) и расширенной структуры агрегации признаков BiFPN. Обучение выполнено на размеченной выборке из 7 500 изображений симптомов бурой и желтой ржавчины. Результаты исследования. Разработанная модель обеспечила высокие показатели качества детекции F1-мера до 0,978, средний IoU – 0,82. Производительность достигала 16,8 FPS на Jetson TX2 и 13,6 FPS на NavQ Plus при энергоэффективности до 2,7 FPS/Вт. Обсуждение и заключение. Сравнительный анализ показал превосходство модели над базовой YOLOv5s по всем ключевым метрикам. Предложенная архитектура демонстрирует высокую точность, устойчивость к шумам и применимость в условиях реального времени. Она может быть использована для создания интеллектуальных систем фитосанитарного мониторинга и автоматизированного управления средствами защиты растений на базе беспилотных летательных аппаратов.
Беспилотный летательный аппарат, фитопатология, глубокое обучение, детекция заболеваний растений, YOLO, встраиваемые платформы, onboard-обработка данных, точное земледелие, нейросетевые архитектуры, агромониторинг
Короткий адрес: https://sciup.org/147253507
IDR: 147253507 | УДК: 004.932.2:631.17:581.2:633.11 | DOI: 10.15507/2658-4123.036.202601.114-139
Development of a Low-Power Onboard System for Point Detection of Wheat Diseases Using a Modified YOLO Architecture
Introduction. Early diagnosis of diseases of cereal crops is a key task for precision agriculture, because late disease detection results in significant yield losses and inefficient use of plant protection products. Existing phytosanitary control systems mainly focus on offline data post-processing and require substantial computational resources that limits their use on board unmanned aerial vehicles (UAV). In this context, a relevant scientific challenge is to ensure highly accurate real-time plant disease diagnosis under strict computational and energy constraints of onboard platforms. Aim of the Study. The study is aimed at developing an energy-efficient onboard wheat disease detection system capable of real-time operation on embedded platforms. Materials and Methods. The object of the study was wheat crops under open-field conditions. The system was tested on the computer modules Jetson TX2, NavQ Plus and Raspberry Pi 4. To build the system, there was used a modified YOLO-based architecture integrating lightweight convolutional blocks (GhostConv, MBConv), attention modules (SE, CBAM), and an extended BiFPN feature aggregation structure. Training was based on a dataset of 7,500 annotated images of brown and yellow rust symptoms. Results. The developed model demonstrated high detection quality scores: F1-score up to 0.978 and average IoU of 0.82. Performance achieved 16.8 FPS on Jetson TX2 and 13.6 FPS on NavQ Plus, with energy efficiency up to 2.7 FPS/W. Discussion and Conclusion. The comparative analysis showed that the proposed model outperformed the baseline YOLOv5s according to all key metrics. The proposed architecture demonstrates high accuracy, robustness to noise, and real-time applicability. It can be used to create intelligent crop health control systems and automated plant protection control based on UAV platforms.
Текст научной статьи Разработка маломощной onboard-системы точечной детекции фитопатологий пшеницы с применением модифицированной YOLO-архитектуры
ТЕХНОЛОГИИ, МАШИНЫ И ОБОРУДОВАНИЕ / TECHNOLOGIES, MACHINERY AND EQUIPMENT
EDN: u₽dates 0ВШ: УДК / UDK 004.932.2:631.17:581.2:633.11
Башкирский государственный аграрный университет, г. Уфа, Российская Федерация, н
Ufa, Russian Federation,
Современное сельское хозяйство, особенно в условиях интенсификации производства и перехода к технологиям точного земледелия, остро нуждается в эффективных системах мониторинга фитосанитарного состояния посевов. Одним из наиболее значимых факторов, негативно влияющих на урожайность зерновых культур, остается фитопатологические заболевания, включая бурую и желтую ржавчину, ежегодно вызывающие потери до 20–30 % от общего объема продукции. Раннее выявление признаков заболеваний позволяет своевременно провести защитные мероприятия и существенно снизить экономический ущерб, однако реализация такого мониторинга традиционными методами (визуальный осмотр, выборочные лабораторные пробы) сопряжена с высокой трудоемкостью, субъективностью и невозможностью охвата больших территорий.
С развитием беспилотных летательных аппаратов (БПЛА) и технологий искусственного интеллекта появились новые подходы к автоматизированному мониторингу сельскохозяйственных угодий. Однако, несмотря на прогресс в области компьютерного зрения и глубинного обучения, большинство существующих решений не адаптированы к эксплуатации в условиях реального времени на борту БПЛА и требуют высокопроизводительных вычислительных серверов. Проблема ограниченных вычислительных и энергетических ресурсов остается одной из ключевых при разработке бортовых систем диагностики, особенно при необходимости детектировать мелкомасштабные симптомы заболеваний в естественных условиях съемки.
Существующие исследования в области детекции фитопатологий преимущественно фокусируются на классификационных задачах, не предполагающих локализацию патологических участков. Более того, предлагаемые архитектуры нейросетей часто избыточны по числу параметров и требуют значительных ресурсов для обучения и инференса. В связи с этим возникает необходимость разработки специализированной энергоэффективной нейросетевой архитектуры, способной к точечному обнаружению заболеваний растений в реальном времени на встроенных устройствах.
Актуальность настоящего исследования обусловлена необходимостью создания интеллектуальных onboard-систем диагностики фитопатологий, пригодных для развертывания на легких БПЛА, оснащенных недорогими вычислительными модулями (Jetson TX2, NavQ Plus, Raspberry Pi 4 и др.). Это позволит внедрять автоматизированный мониторинг здоровья растений непосредственно в процесс
Vol. 36, no. 1. 2026 ENGINEERING TECHNOLOGIES AND SYSTEMS .^Ts агропроизводства, обеспечивая точечное внесение средств защиты растений и снижение общих затрат.
Главной идеей настоящей работы является разработка и экспериментальная проверка модифицированной архитектуры YOLO, оптимизированной для энергоограниченных платформ и дополненной механизмами повышения чувствительности к мелким признакам заболеваний. Предложенная система ориентирована на комплексную оценку точности классификации, скорости обработки и энергоэффективности, что позволит расширить рамки существующих решений.
Целью исследования является создание onboard-системы точечной детекции фитопатологий пшеницы на основе модифицированной YOLO-архитектуры, обеспечивающей высокую точность, производительность и энергоэффективность при работе в реальных полевых условиях на встраиваемых платформах.
Для достижения поставленной цели необходимо проанализировать современные подходы к детекции фитопатологий сельскохозяйственных культур с использованием методов глубокого обучения и бортовых вычислительных систем БПЛА, выявив их ограничения в условиях ограниченных вычислительных и энергетических ресурсов. Разработать модифицированную архитектуру нейросетевого детектора на основе семейства YOLO, ориентированную на повышение энергоэффективности и чувствительности к мелкомасштабным признакам фитопатологий при сохранении возможности работы в реальном времени на встраиваемых платформах. Сформировать и аннотировать датасет изображений посевов пшеницы с признаками бурой и желтой ржавчины, полученных в полевых условиях с использованием беспилотного летательного аппарата. Реализовать и обучить предложенную модель с применением облегченных сверточных блоков и механизмов внимания, а также оптимизированных методов агрегации признаков. Провести экспериментальную оценку качества детекции и локализации фитопатологий с использованием стандартных метрик (Precision, Recall, F1-мера, IoU), а также оценить производительность и энергоэффективность модели на различных встраиваемых вычислительных платформах. Выполнить сравнительный анализ предложенной архитектуры с базовой моделью YOLOv5s, подтвердив статистическую значимость полученных улучшений по точности, скорости обработки и энергоэффективности.
ОБЗОР ЛИТЕРАТУРЫ
Ежегодно фитопатологические заболевания (например, ржавчина зерновых) снижают урожайность сельскохозяйственных культур на 20–30 %, что обуславливает высокую значимость систем ранней диагностики [1]. В последнее десятилетие доминирующим подходом к автоматической идентификации болезней растений стало применение методов глубокого обучения, превосходящих традиционные алгоритмы обработки изображений по точности и надежности. Современные нейросетевые модели демонстрируют впечатляющие результаты: точность классификации заболеваний по изображениям листьев часто превышает 95 %, а сети для детекции и сегментации поражений достигают более 90 % точности при выделении очагов инфекций [2]. Этот прогресс отражен в серии обзоров литературы, суммирующих новейшие достижения и проблемы цифровой фитодиагностики. В частности,
^® ИНЖЕНЕРНЫЕ ТЕХНОЛОГИИ И СИСТЕМЫ Том 36, № 1. 2026 отмечается возрастающий исследовательский интерес к использованию глубоких нейросетей в аграрном секторе и одновременно подчеркивается необходимость адаптации этих моделей к практическим условиям полевого мониторинга.
Развитие БПЛА открыло новые возможности для мониторинга состояния посевов. Технологии дистанционного зондирования, включая съемку с дронов, признаны ключевым инструментом точного земледелия, позволяют оперативно выявлять проблемы на полях и оптимизировать агротехнические меры. Современные БПЛА, оснащенные камерами высокого разрешения, способны собирать детальные данные о заболеваниях растений с высоким пространственным и временным разрешением [3]. Исследователи по всему миру активно применяют БПЛА для обнаружения наиболее распространенных болезней (поражения пшеницы, сахарной свеклы, картофеля, кукурузы, виноградника и др.). Как правило, используются мультиспектральные или RGB-камеры для фиксации симптомов, все чаще в сочетании с методами машинного обучения и глубоких нейронных сетей [3]. В связи с этим сформировался междисциплинарный подход, объединяющий беспилотные платформы и алгоритмы искусственного интеллекта для автоматизированного фитосанитарного мониторинга.
Многие современные исследования ориентированы на применение сверточных нейронных сетей семейства YOLO для детекции признаков заболеваний на аэрофотоснимках сельхозкультур. Например, коллектив ученых из Китая улучшил алгоритм YOLOv5 для распознавания сорного растения Ambrosia Trifida на UAV-изображениях, предложив модификацию YOLOv5-KE [4]. Достигнутая ими точность детекции (AP порядка 93,9 %) подтверждает эффективность глубокого обучения для решения подобных задач. Однако данная модель не была адаптирована под ограниченные вычислительные ресурсы бортовых систем и требовала производительного оборудования, что снизило ее пригодность для автономной работы на дроне. Другой пример, подход MCD-YOLOv5, разработанный L. Li, H. Zhao и N. Liu для идентификации болезней и вредителей с воздуха [5]. В эту модель были интегрированы механизмы внимания (CBAM) и даже трансформер-ные слои, что позволило достичь высокой точности классификации (~88 % в многокультурном наборе данных). Тем не менее, сложная архитектура существенно увеличила требовательность модели к вычислительным ресурсам, затруднив ее развертывание на маломощных платформах.
Параллельно ведутся работы над упрощенными нейросетевыми моделями, ориентированными на классификацию заболеваний растений по изображениям. Исследователи из Синьцзянского университета предложили легкую архитектуру MS-Net, которая достигла 99,8 % точности на популярном датасете PlantVillage и ~97,8 % на реальных изображениях пораженных яблоневых листьев [6]. Высокая результативность MS-Net демонстрирует потенциал компактных CNN в задачах распознавания, однако важно отметить, что эта модель решает лишь задачу классификации (определения болезни на отдельных фото) и не выполняет детекцию объектов, т. е. не локализует пораженные области на больших снимках посевов. Более того, алгоритм не был протестирован в условиях реального времени, оставаясь, по сути, офлайн-методом лабораторной диагностики.
Vol. 36, no. 1. 2026 ENGINEERING TECHNOLOGIES AND SYSTEMS .^Ts Аналогичные ограничения присущи и другим легковесным моделям. Так, индийские ученые представили сеть RTR_Lite_MobileNetV2 для быстрого распознавания болезней растений [7]. Она успешно работает в режиме реального времени и способна различать заболевания по изображениям, однако не предусматривает модуль выявления и отслеживания конкретных очагов инфекции на масштабных кадрах.
Интересный подход предложили Y. Zhong, Z. Teng и M. Tong. Их модель LightMixer представляет собой сверхкомпактную сверточную сеть (число параметров <1,5 млн) и добивается более 99 % точности при классификации листьев томата на наличие болезни [8]. Достижение такой высокой точности при небольшом размере модели подтверждает возможность оптимизации глубокой сети без значимой потери качества. Однако применение LightMixer ограничено задачами статической классификации: в ней отсутствует механизм детекции объектов, и она не адаптирована для работы на борту БПЛА в полевых условиях [9].
Многие из существующих решений либо ориентированы на высокоточную классификацию отдельных изображений, либо требуют ресурсоемких моделей для детекции, что затрудняет их использование в сценариях реального времени на больших территориях.
Практическая реализация беспилотных систем мониторинга диктует необходимость обработки данных непосредственно на устройстве (на самом дроне или связанном с ним вычислительном модуле) без постоянной передачи в облако. Концепция Edge Computing, предполагающая локальную обработку прямо у источника данных, приобретает все большее значение в агротехнологиях [10]. Вынос вычислений «на край» (например, на бортовой компьютер дрона) позволяет существенно снизить задержки и зависимость от каналов связи, обеспечивая оперативное обнаружение болезней и немедленную реакцию (например, точечное внесение пестицидов) [2]. Однако перенос сложных моделей глубокого обучения на маломощные устройства сталкивается с серьезными трудностями.
Во-первых, полевые условия накладывают ограничения на качество входных данных. В естественной среде пораженные участки могут слабо контрастировать с фоном, размеры пятен варьируются, а на изображениях присутствуют шумы и неравномерное освещение [2]. Эти факторы затрудняют выявление болезней традиционными методами машинного зрения, требующими ручного выделения признаков.
Во-вторых, глубокие нейросети более устойчивы к подобным вариациям, но сами по себе часто громоздки. Полнофункциональные модели показывают высокую точность ценой большого числа параметров и вычислительных операций, что делает их несовместимыми с ограниченными ресурсами мобильных и встроенных устройств. Для работы в реальном времени на борту дрона модель должна быть максимально оптимизирована и облегчена. В литературе подчеркивается, что снижение сложности сети (числа параметров, FLOPs) является критически важным для внедрения искусственного интеллекта в сельхозтехнику [2].
Исследователи из Саудовской Аравии и Пакистана продемонстрировали высокую эффективность применения моделей семейства YOLO для диагностики
^® ИНЖЕНЕРНЫЕ ТЕХНОЛОГИИ И СИСТЕМЫ Том 36, № 1. 2026 заболеваний растений на основе изображений листьев. Модели YOLOv3 и YOLOv4, обученные на открытом наборе данных PlantVillage, обеспечивают точность классификации до 97–98 % при высоких показателях скорости и устойчивости к вариабельности симптомов [11]. Полученные результаты подтверждают перспективность использования архитектур YOLO для задач оперативной и потенциально мобильной диагностики фитопатологий, однако подчеркивают необходимость оптимизации вычислительной сложности моделей для внедрения в ресурсоограниченные платформы.
В ответ на этот вызов разрабатываются специальные облегченные версии детекторов. Например, предложена модификация YOLO под названием GVC-YOLO для детекции поврежденных вредителем листьев хлопчатника на Edge-устройстве. Модель основана на компактной версии YOLOv8n с использованием облегченных сверточных блоков (GSConv) и упрощенной Neck-архитектуры VoV-GSCSP, что позволяет снизить сложность сети без критичного падения качества. В результате размер полученной модели составил всего ~5,4 МБ (на 17 % меньше базового YOLOv8n), а число параметров и операций уменьшилось примерно на 16–17 %. При этом точность детекции осталась высокой (суммарная mAP_0,5:0,95 порядка 90,3 %), а скорость обработки достигла ~48 кадров/с на компактном устройстве Jetson Xavier NX [12].
Этот и ряд схожих трудов подтверждают, что комбинация специальных модулей сверток, механизма внимания и оптимизированной архитектуры позволяет достичь баланса между точностью и быстродействием модели на маломощном аппаратном обеспечении.
Несмотря на заметный прогресс, в рассматриваемой области остаются нерешенные вопросы и пробелы.
Во-первых, отмечается недостаток комплексных исследований, оценивающих в совокупности точность алгоритма и показатели его производительности. Многие авторы концентрируются лишь на метриках классификации (Precision, Recall и др.), не анализируя скорость работы модели и ее энергоэффективность на целевой платформе. Между тем для агропромышленных приложений критично именно сочетание высоких показателей распознавания с ограниченным потреблением ресурсов.
Во-вторых, текущие решения, как правило, решают либо задачу локализации пораженных участков, либо задачу определения типа болезни, но не оба аспекта одновременно. Отдельные легкие модели классифицируют заболевание, не умея выделять его на изображении (MS-Net, LightMixer и др.), тогда как облегченные детекторы (вариации YOLO) не предлагают встроенной идентификации конкретного типа патогена. Создание мультитасковой архитектуры, способной одновременно обнаруживать очаги фитопатологий и классифицировать их вид, остается перспективным направлением будущих исследований [13].
В-третьих, даже самые новые и точные алгоритмы компьютерного зрения зачастую непригодны для полевого применения без доработки. К примеру, семейство моделей YOLOv8 демонстрирует рост точности mAP на ~3 % по сравнению с YOLOv5, однако прямое использование YOLOv8 на встроенных платформах затруднено из-за возросших требований к памяти и вычислительной мощности.
Таким образом, перед научным сообществом стоит задача разработки методов, сочетающих высокую точность и робастность обнаружения заболеваний с обеспечением ресурсоэффективности, позволяющей выполнять анализ непосредственно на борту БПЛА в режиме реального времени. Решение данной задачи позволит создать интеллектуальные системы агромониторинга нового поколения, способные существенно повысить оперативность и адресность мер борьбы с болезнями растений.
МАТЕРИАЛЫ И МЕТОДЫ
Объект исследования
Объектом исследования являются посевы пшеницы мягкой яровой (Triticum Aestivum L.), возделываемые в условиях открытого грунта, а также процессы формирования и визуального проявления фитопатологических поражений листового аппарата, обусловленных развитием бурой (Puccinia Triticina) и желтой (Puccinia Striiformis) ржавчины [14].
В рамках работы объект исследования рассматривается с точки зрения возможности автоматизированной точечной детекции и локализации очагов заболеваний по RGB-изображениям, полученным с БПЛА, с последующей обработкой данных непосредственно на борту при использовании энергоограниченных встраиваемых вычислительных платформ.
Материалы и оборудование
Для обеспечения достоверности и воспроизводимости эксперимента была использована следующая материально-техническая база:
– БПЛА DJI Phantom 4 Pro с RGB-камерой 20 МП, фокусное расстояние 8,8 мм;
– вычислительные модули Jetson TX2, NavQ Plus и Raspberry Pi 4;
– измерительные приборы: USB-амперметр (точность 0,01 А) для оценки энергопотребления Raspberry Pi 4 и утилита jtop для мониторинга телеметрических данных Jetson TX2;
– программное обеспечение для обучения и инференса моделей – PyTorch 2.1, CUDA 11.8, Python 3.10.
Общий принцип функционирования onboard-системы диагностики и последовательность обработки данных представлены на структурно-функциональной схеме (рис. 1). Разработанная система представляет собой бортовую интеллектуальную вычислительную платформу, интегрированную в состав БПЛА, и ориентирована на решение задачи автономного фитосанитарного мониторинга сельскохозяйственных культур в реальном времени. Система реализована по модульной архитектуре и включает подсистему сбора данных (RGB-камера), вычислительную подсистему предварительной обработки и нейросетевого анализа изображений, логическую подсистему принятия решений, а также исполнительную подсистему, обеспечивающую управление полетом, пространственную привязку результатов и передачу диагностических данных.
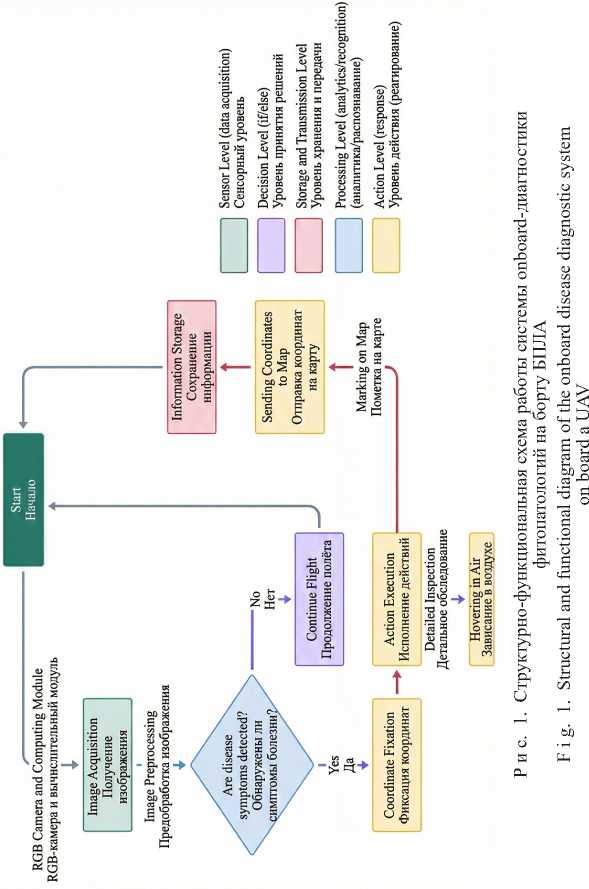
Источник: рисунки 1, 2 составлены авторами статьи в программе «Microsoft Visio».
Source: figures 1, 2 are compiled by the authors using Microsoft Visio.
Методы исследования
Для решения поставленных задач применялся комплекс экспериментальных и вычислительных методов, включающий:
– методы глубокого обучения и компьютерного зрения для решения задачи объектной детекции фитопатологических поражений растений;
– методы архитектурной оптимизации сверточных нейронных сетей, ориентированные на снижение вычислительной сложности и энергопотребления при сохранении высокой точности детекции;
– методы оценки качества распознавания, основанные на расчете метрик Precision, Recall, F1-score и Intersection over Union (IoU);
– методы оценки вычислительной производительности, включающие измерение скорости обработки (FPS) и энергоэффективности (FPS/Вт);
– методы математической статистики для анализа устойчивости результатов и проверки статистической значимости различий между базовой и модифицированной моделями.
Указанные методы были реализованы в виде экспериментальной onboard-системы и апробированы в ходе поэтапного эксперимента, включающего сбор данных, их предварительную обработку, нейросетевой анализ и оценку качества детекции.
Процедура исследования
В рамках экспериментального исследования была реализована onboard-система фитопатологической диагностики, включающая RGB-камеру высокого разрешения и вычислительный модуль обработки изображений.
RGB-камера осуществляла захват визуальных данных посевов, которые по интерфейсу CSI-2 передавались на вычислительный модуль и подвергались предварительной обработке, включающей шумоподавление, цветокоррекцию и нормализацию входных изображений.
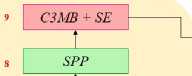
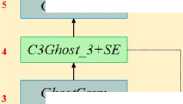
На следующем этапе предварительно обработанные данные анализировались моделью глубокого обучения на основе сверточных нейронных сетей с использованием подхода Object Detection. Архитектура модели была построена на облегченной версии семейства YOLO, оптимизированной для встраиваемых вычислительных платформ за счет применения компактных сверточных блоков GhostConv, C3Ghost, а также блока C3MB с глубинными свертками MBConv (рис. 2) [15].
Для повышения чувствительности к мелкомасштабным признакам фитопатологических поражений в структуру Backbone были интегрированы модули внимания SE и CBAM, обеспечивающие акцентирование признаков, связанных с патологическими изменениями листового аппарата растений.
Для экспериментальной проверки разработанной архитектуры была сформирована схема сравнительного анализа, ориентированная на оценку точности, вычислительной производительности и энергоэффективности модели в полевых условиях.
Для количественной и качественной оценки эффективности разработанного решения была сформирована экспериментальная схема сопоставления двух архитектур нейросетевой детекции – базовой и модифицированной. Анализ проводился для выявления влияния архитектурных преобразований на способность моделей обеспечивать устойчивую пространственную локализацию фитопатологических поражений в условиях ограниченных вычислительных ресурсов и наличия внешних искажений входных данных.
Backbone
Базовый экстрактор признаков
GhostConv |
C3Ghost 3+SE
GhostConv
GhostConv
C3 Ghost 1
GhostConv
Focus
Input
Входные данные
RGB (640^640x3)
Neck
Блок агрегации признаков
Head
Выходной детектор
Выходные данные
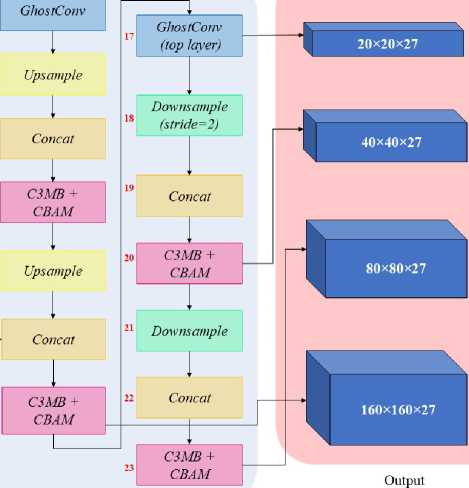
Р и с. 2. Архитектура модифицированной модели для точечной детекции заболеваний растений на основе облегченного YOLO-детектора
F i g . 2. Architecture of the modified model for spot detection of plant diseases based on a lightweight YOLO detector
В качестве исходной архитектурной основы использовалась модель YOLOv5s, выбранная по совокупности показателей вычислительной сложности и качества распознавания. Данная конфигурация характеризуется значением метрики mAP@0,5 порядка 0,90 при сравнительно небольшом числе параметров (около 7 млн) и вычислительной нагрузке на уровне ~17 GFLOPs, что позволяет реализовать высокопроизводительный инференс без предъявления повышенных требований к аппаратной платформе. Указанные свойства обосновывают использование YOLOv5s в качестве базовой модели для дальнейшей адаптации к условиям энергоограниченных встраиваемых систем.
Предложенная модифицированная архитектура ориентирована на снижение вычислительных затрат за счет уменьшения пространственного разрешения входных данных до 416×416 пикселей при сохранении диагностической информативности.
Vol. 36, no. 1. 2026 ENGINEERING TECHNOLOGIES AND SYSTEMS .^Ts С целью оптимизации вычислительного графа стандартные сверточные операции были заменены облегченными архитектурными блоками GhostConv и C3Ghost, дополненными механизмами канального внимания SE, что позволило сократить избыточные вычисления без деградации качества извлекаемых признаков. Для повышения избирательности сети к локальным патологическим изменениям дополнительно интегрированы модули пространственно-канального внимания CBAM.
В части многомасштабной обработки признаков традиционная схема агрегации PANet была заменена расширенным вариантом BiFPN, обеспечивающим более эффективное объединение признаков различных уровней абстракции. Архитектура детекторной части дополнена дополнительным уровнем P2, предназначенным для выявления мелкоразмерных объектов, характерных для ранних стадий фитопатологических поражений. Кроме того, в структуру модели внедрены глубинные сверточные блоки MBConv, отсутствующие в базовой конфигурации, что позволило повысить эффективность извлечения признаков при одновременном снижении вычислительной сложности сети [16].
На первом этапе выполнялся сбор исходных данных. Аэрофотосъемка посевов пшеницы осуществлялась в полевых условиях в вегетационный период при естественном освещении. Высота полета БПЛА составляла 7–10 м, что обеспечивало достаточное пространственное разрешение для фиксации мелкомасштабных симптомов фитопатологических поражений. Съемка проводилась в разные дни и при различных условиях освещенности с целью повышения вариативности данных.
На следующем этапе формировался и аннотировался датасет изображений. Всего было отобрано 7 500 RGB-изображений, включающих как здоровые растения, так и растения с признаками бурой и желтой ржавчины. Разметка выполнялась вручную с использованием ограничивающих прямоугольников и верифицировалась экспертами-агрономами. Для повышения обобщающей способности модели применялись методы аугментации данных, увеличившие объем обучающей выборки. Данные были разделены на обучающую, валидационную и тестовую выборки в соотношении 70 % / 15 % / 15 % (табл. 1).
Т а б л и ц а 1
T a b l e 1
Соотношения количество собранных данных для обучения
Distribution of the collected dataset for model training
|
Класс заболеваний / Disease class |
Количество фото / Number of images |
тренировочные / train |
валидационные / val |
тестовые / test |
|
|
шт. / piece |
% |
||||
|
Бурая ржавчина / Brown rust |
3 970 |
52,93 |
2779 |
596 |
595 |
|
Желтая ржавчина / Yellow rust |
3 530 |
47,07 |
2471 |
530 |
529 |
|
Процентное соотношения / Percentage distribution |
7 500 |
100 |
70 % |
15 % |
15 % |
Тестовая выборка включала изображения с других полей и разных дней съемки для оценки обобщающей способности модели. Далее выполнялась экспериментальная проверка обученных моделей на встраиваемых вычислительных платформах Jetson TX2, NavQ Plus и Raspberry Pi 4, установленных на борту БПЛА (рис. 3). Их характеристики приведены в таблице 2. Для каждой платформы измерялись показатели точности детекции, скорость инференса и энергопотребление в режиме работы. Значения FPS и энергопотребления усреднялись по 100 итерациям обработки.
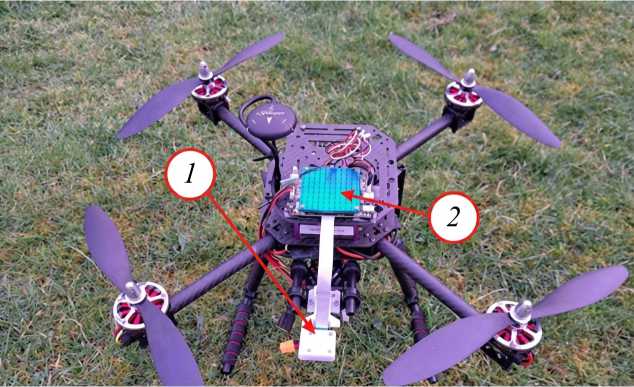
Р и с. 3. Место установки бортовых вычислительных модулей:
1 – камера Google Coral; 2 – бортовой компьютер NXP NavQ Plus, Jetson TX2, Raspberry Pi 4
F i g. 3. Installation location of onboard computing modules on the unmanned aerial vehicle:
1 - Google Coral RGB camera; 2 - onboard computing module (NXP NavQ Plus / NVIDIA Jetson TX2 / Raspberry Pi 4)
Источник: фотографии для рисунков 3, 6 сделаны авторами в ходе натурных экспериментов летом 2024 года.
Source: the photographs for figures 3,6 are taken by the authors during field experiments in summer 2024.
Т а б л и ц а 2
T a b l e 2
Сравнение вычислительных модулей
Comparison of computing modules used in the onboard system
|
Платформа / Platform |
ЦПУ / CPU |
Акселератор / Accelerator |
ОЗУ / RAM |
Энергопотребление/ Power consumption |
|
NVIDIA |
2*Denver2 + |
GPU 256- |
8 ГБ / |
7,5–15 Вт (типич. =10 Вт) / |
|
Jetson TX2 |
+ 4xARM A57 @ 2 ГГц / 2 GHz |
ядер Pascal (1,3 TFLOPS) |
8 GB |
7.5–15 W (typical ~10 W) |
|
NXP NavQ Plus |
4*Cortex-A53 @ 1,8 ГГц / 1.8 GHz |
NPU 2,3 TOPS |
4 ГБ / 4 GB |
= 5 Вт / 5 W |
|
Raspberry Pi 4 |
4xCortex-A72 @ 1,5 ГГц / 1.5 GHz |
– |
4 ГБ / 4 GB |
= 6 Вт / 6 W |
Jetson TX2 превосходит другие платформы по вычислительной мощности благодаря встроенному GPU. NavQ Plus и Raspberry Pi 4 близки по CPU-ресурсам, но NavQ имеет преимущество за счет нейронного ускорителя.
Для оценки качества использовались стандартные метрики Recall, Precision, F1-мера и IoU [4; 11]. Также измерялись среднее время обработки и скорость (FPS), с усреднением по 100 итерациям. Энергопотребление оценивалось в режимах простоя и инференса по формуле [17]:
P = U • I, где P – потребляемая электрическая мощность, Вт; U – напряжение питания, В; I – сила электрического тока, А.
Для Jetson TX2 дополнительно применялась утилита jtop, позволяющая получать телеметрические данные о текущем энергопрофиле. Для Raspberry Pi использовался внешний USB-амперметр с разрешением 0,01 А.
Для количественной оценки и проверки достоверности результатов использовались методы описательной и параметрической статистики. Для каждой исследуемой метрики (Precision, Recall, F1, IoU, FPS, FPS/Вт) рассчитывались средние значения, стандартное отклонение и 95 %-й доверительный интервал по 100 итерациям инференса.
Для сравнения результатов базовой модели YOLOv5s и модифицированной архитектуры применялся t-критерий Стьюдента (уровень значимости p < 0,05), что позволило подтвердить статистическую значимость улучшений.
Для обоснования конкурентоспособности предложенной модели была проведена сравнительная оценка существующих подходов. При сравнении учитывались тип решаемой задачи, показатели точности, вычислительная производительность, пригодность для работы в реальном времени и возможность развертывания на энергоограниченных встраиваемых платформах.
РЕЗУЛЬТАТЫ ИССЛЕДОВАНИЙ
В рамках сравнительного анализа рассматривались две конфигурации нейросетевого детектора: базовая модель YOLOv5s [5] и предложенная модифицированная архитектура, разработанная с целью повышения точности распознавания и энергоэффективности при работе на вычислительно ограниченных встраиваемых платформах. Процессы обучения и последующей валидации моделей проанализированы на основе динамики функций потерь и основных метрик качества, представленных на рисунках 4 и 5.
Анализ динамики обучения показал стабильную сходимость обеих моделей, характеризующуюся последовательным снижением значений box_loss и obj_loss. Для модифицированной архитектуры наблюдалась более выраженная скорость сходимости и меньшая вариативность значений потерь, что указывает на улучшенную способность к обобщению. Показатель cls_loss в обоих случаях был равен нулю вследствие бинарной постановки задачи. Итоговые значения mAP@0,5 и mAP@0,5:0,95 для модифицированной модели составили 0,98 и 0,83 соответственно, тогда как для YOLOv5s – 0,90 и 0,75.
Анализ кривых обучения, представленных на рисунках 4 и 5, показывает, что применение облегченных вычислительных блоков GhostConv и MBConv обеспечило более высокую скорость сходимости и устойчивость процесса оптимизации. Для модифицированной архитектуры характерна ранняя стабилизация значений Technologies, machinery and equipment 127
функций obj_loss и box_loss, что свидетельствует о снижении чувствительности модели к шумам входных данных и повышении устойчивости обучения. Интеграция механизмов внимания SE и CBAM способствовала уменьшению эффекта переобучения, что выражается в сокращении разрыва между значениями ошибок на обучающей и валидационной выборках.
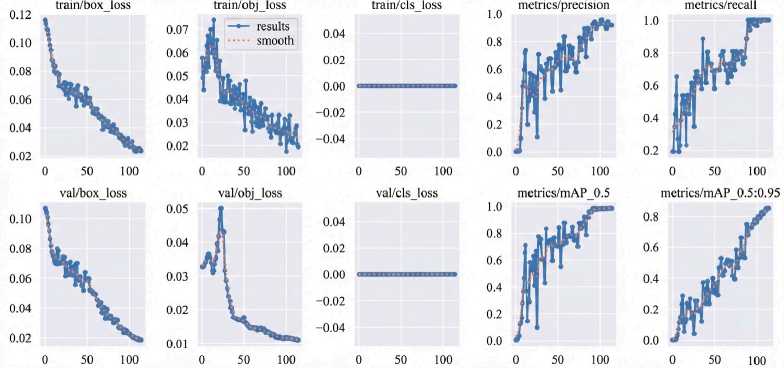
Р и с. 4. Визуализация оценки производительности модели YOLOv5s во время обучения
F i g. 4. Visualization of YOLOv5s model performance during training
Источник: графики для рисунков 4, 5 автоматически сгенерированы авторами в ходе обучения модели в локальной вычислительной среде с использованием фреймворка Ultralytics YOLOv5 (Python, PyTorch).
Source: figures 4, 5 graphs were automatically generated by the authors during model training using the framework Ultralytics YOLOv5 (Python, PyTorch).
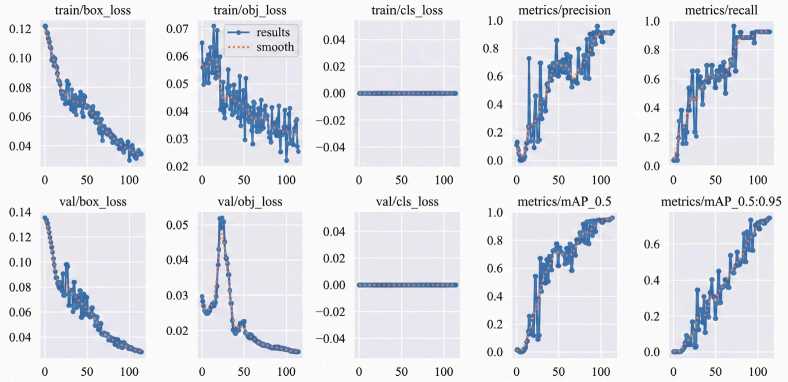
Р и с. 5.Визуализация оценки производительности модели модифицированной модели во время обучения
F i g. 5. Visualization of the modified model performance during training
128 Технологии, машины и оборудование
Использование расширенного модуля агрегации признаков BiFPN совместно с дополнительным выходным уровнем P2 позволило повысить эффективность обнаружения мелкомасштабных объектов. Данный эффект проявился в увеличении значения метрики Recall при одновременном сохранении стабильных значений Precision, что указывает на улучшенный баланс между полнотой и точностью детекции [18; 19].
Для количественной оценки различий между базовой и модифицированной архитектурами был выполнен статистический анализ показателей Precision, Recall и F1. Полученные результаты показали снижение числа ложных срабатываний (FP) и пропусков (FN) в диапазоне от 18 до 24 % в зависимости от используемой вычислительной платформы. Выявленные различия являются статистически значимыми (p < 0,05), что подтверждает устойчивость предложенной архитектуры к аппаратным ограничениям и ее повышенную чувствительность к мелкомасштабным признакам фитопатологических поражений.
Экспериментальная проверка работоспособности системы проводилась как на офлайн-тестовой выборке, так и в условиях реальных полетов БПЛА. Тестовый набор включал 1 124 изображения, полученных при высоте съемки 5–10 м в различных условиях освещенности (рис. 6), с равномерным распределением образцов между классами бурой и желтой ржавчины.

a)
b)
Р и с. 6. Фотографии детектирования:
a) на высоте 5 м; b) на высоте 10 м
F i g. 6. Examples of disease detection in wheat crops: a) imaging at an altitude of 5 m; b) imaging at an altitude of 10 m
Для оценки качества работы системы были рассчитаны метрики (Precision, Recall, F1, IoU) по бурой и желтой ржавчине для базовой и модифицированной моделей (табл. 3, 4) [20].
Т а б л и ц а 3
T a b l e 3
Оценка точности и локализации модели YOLOv5s на встраиваемых платформах
Evaluating the accuracy and localization of the model YOLOv5s on embedded platforms
|
Платформа / Platform |
Точность / Accuracy (%) |
Точность (бур.) / Accuracy (brown rust) |
Полнота (бур.) / Recall (brown rust) |
F1-мера (бур.) / F1-score (brown rust) |
Точность (желт.) / Accuracy (yellow rust) |
Полнота (желт.) / Recall (yellow rust) |
F1-мера (желт.) / F1-score (yellow rust) |
IoU (среднее) / IoU (mean) |
|
Jetson TX2 |
95,30 |
0,925 |
0,935 |
0,930 |
0,937 |
0,927 |
0,932 |
0,765 |
|
NavQ Plus |
91,65 |
0,902 |
0,890 |
0,896 |
0,881 |
0,902 |
0,891 |
0,715 |
|
Raspberry Pi 4 |
79,50 |
0,803 |
0,765 |
0,784 |
0,776 |
0,822 |
0,798 |
0,685 |
Т а б л и ц а 4
T a b l e 4
Оценка точности и локализации модифицированной модели на встраиваемых платформах Evaluating the accuracy and localization of the modified model on embedded platform
|
Платформа / Platform |
Точность / Accuracy (%) |
Точность (бур.) / Accuracy (brown rust) |
Полнота (бур.) / Recall (brown rust) |
F1-мера (бур.) / F1-score (brown rust) |
Точность (желт.) / Accuracy (yellow rust) |
Полнота (желт.) / Recall (yellow rust) |
F1-мера (желт.) / F1-score (yellow rust) |
IoU (среднее) / IoU (mean) |
|
Jetson TX2 |
97,81 |
0,973 |
0,983 |
0,978 |
0,983 |
0,973 |
0,978 |
0,820 |
|
NavQ Plus |
95,25 |
0,966 |
0,949 |
0,957 |
0,950 |
0,966 |
0,958 |
0,790 |
|
Raspberry Pi 4 |
84,87 |
0,860 |
0,813 |
0,836 |
0,826 |
0,870 |
0,847 |
0,740 |
Результаты экспериментальной оценки показали, что модифицированная архитектура обеспечивает устойчивый рост показателей точности и полноты распознавания для обоих классов заболеваний на всех исследуемых вычислительных платформах. Наиболее выраженный эффект зафиксирован при работе на платформе Raspberry Pi 4: для класса бурой ржавчины значение Precision увеличилось с 0,803 до 0,860, а Recall – с 0,765 до 0,813, что указывает на снижение ложных срабатываний и пропусков объектов.
Улучшение интегральной метрики F1 также носит систематический характер. Так, при детекции желтой ржавчины значение F1 на платформе Jetson TX2 возросло с 0,932 до 0,978, а на NavQ Plus – с 0,891 до 0,958, что свидетельствует о более сбалансированном соотношении между точностью и полнотой распознавания в условиях ограниченных вычислительных ресурсов.
Дополнительным подтверждением повышения качества пространственной локализации объектов является рост среднего значения метрики IoU. Для платформы Jetson TX2 данный показатель увеличился с 0,765 до 0,820, для NavQ Plus – с 0,715 до 0,790, а для Raspberry Pi 4 - с 0,685 до 0,740. Наблюдаемая динамика подтверждает эффективность предложенных архитектурных решений, направленных на улучшение детекции мелкомасштабных фитопатологических признаков.
Сравнительный анализ матриц ошибок, представленных на рисунках 7 и 8, выполненный для трех вычислительных платформ, позволил выявить общие закономерности поведения моделей и платформо-зависимые особенности их работы в различных вычислительных средах.
130 Технологии, машины и оборудование
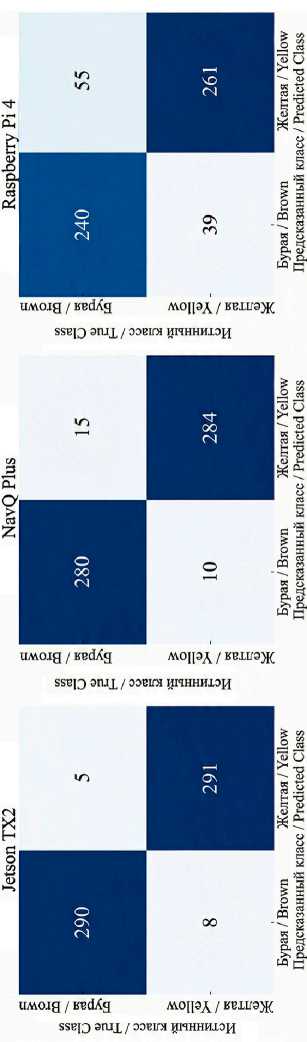
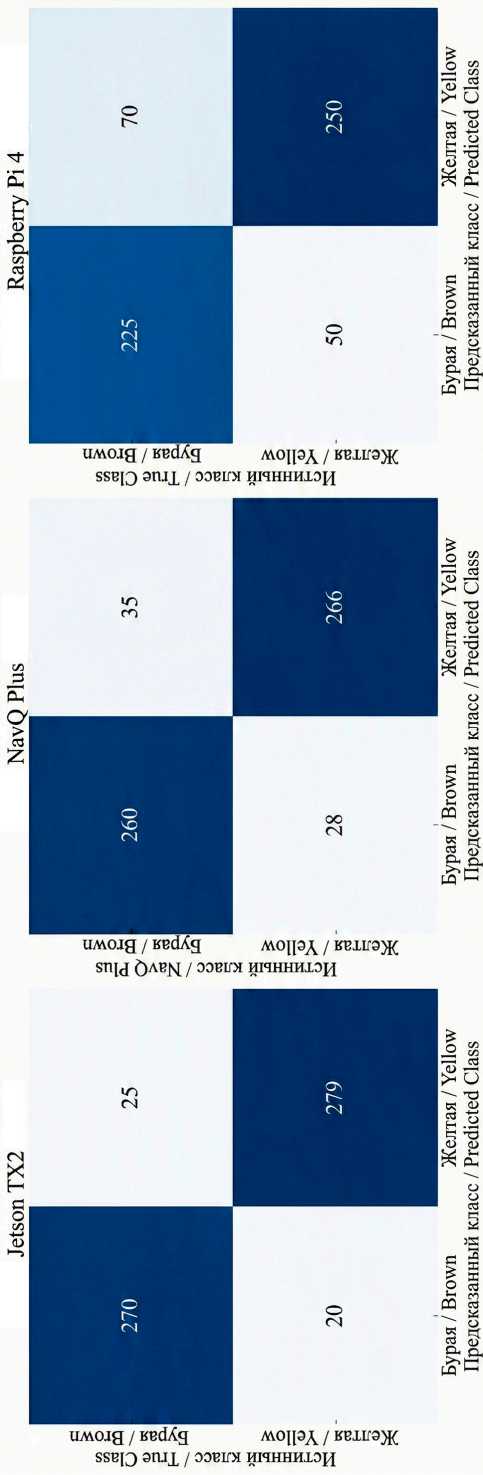
Анализ матриц ошибок продемонстрировал, что предложенная модифицированная архитектура обеспечивает существенное сокращение межклассовых ошибок, выражающихся в ложных срабатываниях (FP) и пропусках (FN), на всех исследуемых вычислительных платформах. На платформе Jetson TX2 суммарное количество ошибок снизилось с 45 (25 FP и 20 FN) до 13 (5 FP и 8 FN). Аналогичная тенденция зафиксирована для NavQ Plus, где общее число ошибок уменьшилось с 63 до 26, а также для Raspberry Pi 4, на которой показатель снизился со 120 до 94.
Полученные результаты свидетельствуют о том, что реализованные архитектурные модификации способствуют повышению устойчивости нейросетевой модели к ограничениям аппаратных ресурсов и обеспечивают улучшенные обобщающие свойства при эксплуатации в различных вычислительных средах [21].
Сводные показатели производительности, энергопотребления и энергоэффективности исследуемых моделей приведены в таблице 5.
Т а б л и ц а 5
T a b l e 5
Показатели производительности и энергоэффективности базовой модели YOLOv5s на различных встраиваемых платформах
Performance and energy efficiency indicators of the baseline model YOLOv5s on various embedded platforms
|
Модель/Платформа / Model/Platform |
FPS (кадров/с) / FPS (frames per second) |
Энергопотребление, Вт / Power consumption, W |
FPS/Вт / FPS/W |
|
YOLOv5s/TX2 |
14,3 |
12 |
1,2 |
|
Модиф. YOLO/TX2 / Modified YOLO/TX2 |
16,8 |
12 |
1,4 |
|
YOLOv5s/NavQ |
10,5 |
5 |
2,1 |
|
Модиф. YOLO/NavQ / Modified YOLO/NavQ |
13,6 |
5 |
2,7 |
|
YOLOv5s/RPi 4 |
5,0 |
4 |
0,5 |
|
Модиф. YOLO/RPi 4 / Modified YOLO/RPi 4 |
6,8 |
4 |
1,7 |
Сопоставление с базовой архитектурой YOLOv5s показало, что предложенная модифицированная модель обеспечивает увеличение частоты обработки кадров в диапазоне 17–36 % без роста энергопотребления. На платформе NavQ Plus значение FPS возросло с 10,5 до 13,6 FPS, при этом показатель энергоэффективности увеличился с 2,1 до 2,7 FPS/Вт, что свидетельствует о более рациональном использовании вычислительных и энергетических ресурсов.
Аналогичная тенденция зафиксирована и для платформы Raspberry Pi 4, где производительность повысилась с 5,0 до 6,8 FPS, а энергоэффективность – с 0,5 до 1,7 FPS/Вт. Данный прирост соответствует примерно трехкратному увеличению энергоэффективности, что подтверждает целесообразность архитектурной оптимизации модели для эксплуатации на маломощных вычислительных платформах.
Полученные значения F1, IoU, FPS и FPS/Вт демонстрируют взаимосвязанное улучшение точности и энергоэффективности предложенной архитектуры. Наблюдаемый рост F1 сопровождается пропорциональным увеличением FPS/Вт,
^® ИНЖЕНЕРНЫЕ ТЕХНОЛОГИИ И СИСТЕМЫ Том 36, № 1. 2026 что подтверждает достижение поставленной цели – оптимизации детектора под условия ограниченных вычислительных ресурсов без потери точности.
Достигнутые улучшения обусловлены комплексной архитектурной оптимизацией, включающей использование облегченных сверточных блоков GhostConv, C3Ghost и MBConv, интеграцию механизмов внимания SE и CBAM, а также применение расширенной схемы агрегации признаков BiFPN с дополнительным выходным уровнем P2. Совокупность указанных решений позволила повысить энергоэффективность и устойчивость работы модели, а также улучшить точность классификации и локализации объектов при одновременном снижении общего числа параметров сети.
Результаты сравнительной оценки предложенной модели и существующих подходов представлены в таблице 6. Анализ показывает, что разработанная архитектура обеспечивает более высокие показатели точности и локализации при существенно меньших вычислительных и энергетических затратах, что делает ее пригодной для применения на энергоограниченных встраиваемых платформах в задачах оперативной фитопатологической диагностики.
Т а б л и ц а 6
T a b l e 6
Сравнительная характеристика существующих моделей детекции и классификации болезней растений
Comparative characteristics of existing models for plant disease detection and classification
|
Модель / Model |
Тип задачи / Task type |
Показатели качества / Performance indicators |
Реальное время / Real-time |
Встраиваемые платформы / Embedded platforms |
Источник / Reference |
|
MS-Net |
Классификация / Classification |
Высокая точность ~99,8 % / High accuracy ~99.8% |
Нет / No |
Нет / No |
[6] |
|
RTR_Lite_ MobileNetV2 |
Классификация / Classification |
Точность до 97 % / Accuracy up to 97% |
Да / Yes |
Нет / No |
[7] |
|
YOLOv5-KE |
Детекция / Detection |
AP ~93,9 % / AP ~93.9% |
Нет / No |
Нет / No |
[4] |
|
MCD-YOLOv5 |
Детекция / Detection |
F1 ~88 % / F1 ~88% |
Нет / No |
Нет / No |
[5] |
|
LightMixer |
Классификация / Classification |
До 99 % при малом размере / Up to 99% with compact size |
Да / Yes |
Нет / No |
[8] |
|
GVC-YOLO |
Детекция / Detection |
mAP@0,5:0,95 ~90,3 % / mAP@0.5:0.95 ~90.3% |
Да / Yes |
Да / Yes |
[12] |
|
Предлагаемая модель / Proposed model |
Детекция / Detection |
F1 до 0,978; IoU до 0,82 / F1 up to 0.978; IoU up to 0.82 |
Да / Yes |
Да / Yes |
– |
Большинство известных моделей, особенно высокоточных классификаторов (MS-Net, LightMixer), не поддерживают локализацию очагов поражения.
Vol. 36, no. 1. 2026 ENGINEERING TECHNOLOGIES AND SYSTEMS .^Ts Другие, такие как YOLOv5-KE и MCD-YOLOv5, хотя и решают задачи детекции, не приспособлены к исполнению на маломощных устройствах. Модель GVC-YOLO демонстрирует сбалансированность, однако уступает предложенному решению по F1 и энергоэффективности.
Предложенная архитектура сочетает точность, энергоэффективность и применимость в реальном времени, что позволяет рассматривать ее как научно обоснованную и технологически реализуемую основу для создания интеллектуальных систем агромониторинга.
ОБСУЖДЕНИЕ И ЗАКЛЮЧЕНИЕ
Сопоставление количественных результатов с исходными целями исследования показывает, что повышение точности детекции напрямую коррелирует с ростом энергоэффективности и устойчивости инференса на встраиваемых вычислительных устройствах, что подтверждает эффективность предложенных архитектурных решений при реализации onboard-систем реального времени. Впервые для задач onboard-диагностики заболеваний растений в настоящей работе реализована комплексная интеграция облегченных сверточных блоков GhostConv и MBConv, а также модулей внимания SE и CBAM, что позволило существенно повысить чувствительность модели к мелкомасштабным признакам фитопатологий при одновременном снижении вычислительной и энергетической нагрузки.
Предложенная архитектура нейросетевого детектора на основе модифицированной версии YOLO демонстрирует высокий потенциал применения в задачах точечной детекции фитопатологий на встраиваемых платформах. Разработанная система продемонстрировала F1-меру = 0,978, средний IoU = 0,82, производительность до 16,8 FPS на Jetson TX2 и 13,6 FPS на NavQ Plus при энергоэффективности до 2,7 FPS/Вт – сопоставимы или превосходят аналогичные показатели современных решений, представленных в научной литературе. Эти значения подтверждены статистически (p < 0,05) и свидетельствуют о существенном повышении эффективности по сравнению с базовой моделью YOLOv5s.
Практическая реализация разработанной системы открывает возможность внедрения алгоритмов точечной детекции заболеваний растений непосредственно на борту БПЛА [22]. Это обеспечивает автономную диагностику фитопатологий без необходимости передачи данных на удаленные серверы, а также создает предпосылки для интеграции с системами прецизионного внесения средств защиты растений. Полученные результаты имеют как научную, так и прикладную ценность для развития технологий точного земледелия.
В дальнейшем предполагается развитие архитектуры в направлении муль-титасковой модели, способной одновременно классифицировать тип болезни, локализовать очаги поражения и прогнозировать динамику их распространения. Отдельный интерес представляет интеграция трансформерных блоков и муль-тиспектральных сенсоров, что позволит повысить устойчивость модели к шуму и улучшить интерпретируемость результатов.
