Разработка математических моделей технологического оборудования поворотного лесопогрузчика в режиме подъема груза

Автор: Полетайкин В.Ф.
Журнал: Вестник Красноярского государственного аграрного университета @vestnik-kgau
Рубрика: Технология переработки
Статья в выпуске: 11, 2012 года.
Бесплатный доступ
Статья посвящена разработке математических моделей технологического оборудования поворотного лесопогрузчика, оснащенного комбинированным манипулятором с подвижной в продольновертикальной плоскости колонной. Рассмотрен режим подъема груза при одновременном движении стрелы и подвижной колонны из положения набора груза в транспортное положение.
Лесопогрузчики поворотные, расчетные схемы, динамические системы, математические модели
Короткий адрес: https://sciup.org/14082123
IDR: 14082123 | УДК: 630.377.4
Elaboration of the mathematical models for the rotary logger manufacturing equipment in the mode of load lifting
The article is devoted to elaboration of the mathematical models for the rotary logger manufacturing equipmentfitted out by the combined manipulator with a mobile in the longitudinal-vertical plane column. The mode of the load lifting is considered at simultaneous movement of the lift and the mobile column from the position of the cargo load up (pack, set) in transport position.
Текст научной статьи Разработка математических моделей технологического оборудования поворотного лесопогрузчика в режиме подъема груза
Введение. В лесной промышленности широко применяются машины, у которых в качестве рабочего оборудования установлены комбинированные гидрофицированные манипуляторы. Машины такого типа используются на следующих операциях лесозаготовительного производства: валка, валка-пакетирование, подбор и трелевка ранее поваленных деревьев, штабелевка сортиментов, подача деревьев к сучкорезным устройствам, погрузка сортиментов и т.д. Кроме этого они выполняют различные вспомогательные работы: погрузка и выгрузка стройматериалов (сыпучих грузов) при строительстве дорог, укладка плит на полотно дороги, погрузка пневого осмола, уборка отходов на нижних складах и другие работы. Лесопогрузчики поворотного типа находят широкое применение в лесной промышленности при заготовке древесного сырья в виде сортиментов и хлыстов. Работы по созданию и совершенствованию лесных машин целесообразно проводить на основе изучения динамики элементов конструкции и рабочих режимов. При этом методы математического моделирования являются наиболее эффективными. Исходя из этого, исследования на математических моделях динамики режима движения технологического оборудования с грузом поворотного лесопогрузчика, направленные на обоснование параметров кинематики и конструкции технологического оборудования, следует считать актуальными.
Обоснование расчетной схемы
Расчетная схема системы «технологическое оборудование – груз» представлена на рисунке 1. Рассматриваемый режим может иметь место при работе манипулятора в качестве технологического оборудования лесопогрузчиков, валочно-трелевочных машин, машин для бесчокерной трелевки деревьев и других лесосечных и дорожно-строительных машин.
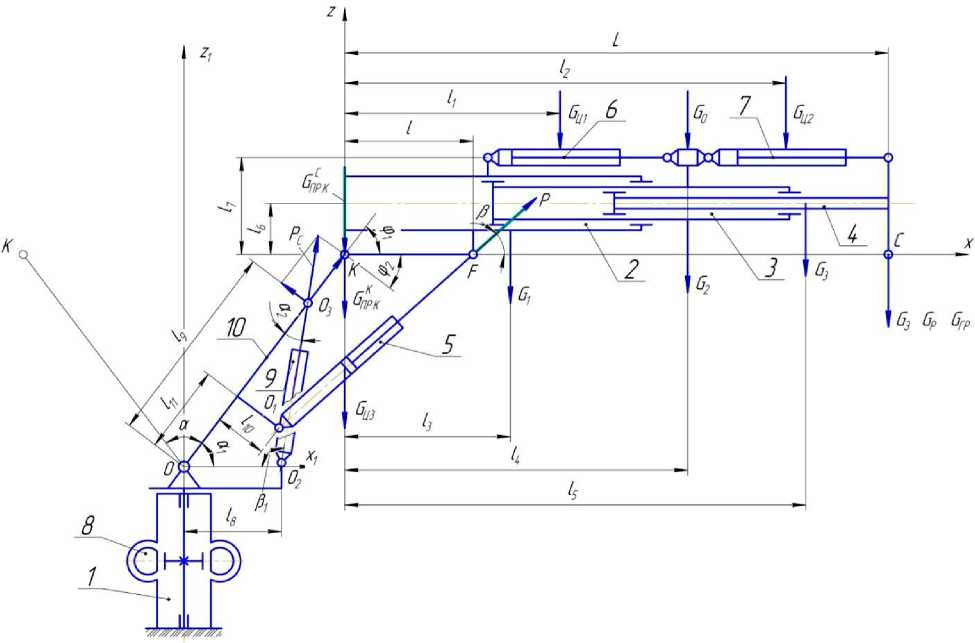
Рис. 1. Расчетная схема системы «технологическое оборудование – груз» (манипулятор с отклоняющейся колонной): 1 – опорно-поворотное устройство; 2–4 – наружная, средняя, внутренняя секции телескопической стрелы; 5 – гидроцилиндр подъема стрелы; 6, 7 – гидроцилиндры МВС;
8 – механизм поворота манипулятора в горизонтальной плоскости; 9 – гидроцилиндр поворота колонны;
10 – колонна; О 1 K = С; ОО 2 = ℓ 8 = C 1
После захвата груза рабочим органом он подтягивается к машине телескопической стрелой втягиванием секций, затем включением гидроцилиндров поворота колонны (МПК) и подъема стрелы (МПС) груз устанавливается в транспортное положение. При этом стрела совершает поворот относительно оси K, а колонна относительно оси О. Угол поворота стрелы φ (относительное движение), угол поворота колонны α (переносное движение). Отсчет начала угла φ от крайнего нижнего положения стрелы; отсчет угла α – от крайнего правого положения колонны.
На рисунке 1 приняты следующие обозначения:
G 1 , G 2 ,G 3 – силы тяжести наружной, средней и внутренней секций стрелы;
G Ц1 ,G Ц2 , G 0 – силы тяжести гидроцилиндров выдвижения секций и механизма выдвижения секций стрелы;
G З , G ГР , G Р – силы тяжести захвата, груза, ротатора;
G Ц3 , G Ц4 – силы тяжести гидроцилиндров поворота колонны и подъема стрелы;
G ПР.С – суммарная сила тяжести элементов конструкции стрелы и груза, приведенная к точке С;
Р, Р С – усилия на штоках гидроцилиндров поворота колонны и подъема стрелы;
L – размер стрелы при втянутых секциях;
ℓ 1 , ℓ 2 , ℓ 3 , ℓ 4 , ℓ 5 – расстояния от оси вращения стрелы K до центров тяжести элементов конструкции; ℓ 6 , ℓ 7 , ℓ 8 , ℓ 9 , ℓ 10 , ℓ 11 – размеры элементов конструкции манипулятора.
Разработка уравнений движения системы «технологическое оборудование – груз»
Стрела совершает вращение в плоскости ZKX, колонна – в плоскости Z 1 OX 1 . Углы поворота α и φ однозначно определяют положения данных элементов системы в плоскостях вращения. При известных размерах стрелы L и колонны L K положение любой точки может быть определено через указанные параметры.
Исходя из этого, систему можно рассматривать как систему с двумя степенями свободы (K = 2) с обобщенными координатами α и φ.
Для составления уравнений движения данной механической системы воспользуемся уравнениями Лагранжа 2-го рода. В соответствии с числом степеней свободы системы записываем два уравнения Лагранжа
Ш—(Э = « • • Х)-(Э =
где Q a, Q ^ - обобщенные силы, соответствующие обобщенным координатама и ф соответственно.
Кинетическая энергия рассматриваемой системы равна сумме кинетических энергий колонны и стрелы, т.е. сумме кинетических энергий в относительном и переносном движении
T = Т 1 + T 2 , (2)
где T 1 – кинетическая энергия приведенной массы колонны вместе с приведенными массами элементов конструкции, смонтированных на ней (гидроцилиндров поворота колонны и подъема стрелы и других частей гидропривода);
T 2 – кинетическая энергия приведенной массы стрелы и груза.
В процессе поворота телескопической стрелы ее секции не выдвигаются, размер стрелы L не изменяется, следовательно, положения центров масс элементов конструкции стрелы относительно оси K (радиусы инерции масс) остаются постоянными. В этом случае с целью упрощения определения кинетической энергии системы массы элементов конструкции телескопической стрелы приводим к точке C – к точке подвеса ротатора к стреле. Массу элементов конструкции колонны приводим к оси крепления стрелы K. При определении приведенной массы элементов конструкции стрелы m ПР.С исходим из условия равенства кинетической энергии приведенной массы сумме кинетических энергий масс, которые она заменяет.
Следовательно
—С7— = 77 • [(^ 1 1 2 + ^ 2 1 2 + ^ з 1 2 + G ц 1 1 2 + Go 1 2 + G p + G з + G rp )]. (3)
2д 2д
Отсюда приведенная к точке C масса стрелы
Или
т ПР . С
G np . С _ G 1 д д
р2 г р2 Г 22 Г 22
• 1 з + _ 2 . 1 4 + _ з • 1 5 + G Ц 1 • 1 1
L 2 д L 2 д L 2 д L 2
I П о 1 2
+7 7^ +
G p +G з + G гр
G Ц 2 д
L2 +
т пр . с _т 1Г 2 + т 2Г Г + т зг 2 + т Ц 1^ 2 + т Ц 2^ 2 + т о г т + т р + т з + т гр • (5)
где m 1 – масса наружной секции стрелы;
-
m 2 – масса средней секции стрелы;
-
m 3 – масса внутренней секции стрелы;
-
m Ц1 , m Ц2 – массы гидроцилиндров механизма выдвижения секций;
-
m 0 – масса механизма выдвижения секций;
-
m Р , m З , m ГР – массы ротатора, захвата, груза.
Приведенная к точке K масса колонны и элементов конструкции, закрепленных на ней может быть определена из следующего выражения:
G ПР . К а2 4 _ G К a2 (0,5L К )2 + 0,5G ц 3 а:2 (0,5 1 )2 + 0,5G ц 4а2 (0,5 1 8 )2 2д 2д 2д 2д '
При составлении выражения (6) исходим из допущения о том, что силы тяжести гидроцилиндров GЦ3 и GЦ4 равномерно распределены между стрелой и колонной, а так же между колонной и основанием опорно- поворотного устройства; точки их приложения находятся, соответственно, 0,5ℓ и 0,5ℓ8 от оси крепления стрелы к колонне – точка K.
Из выражения (6) приведенная к точке K масса колонны и элементов конструкции равна
Gк (0,5Lк)2 0,5Gц3 (0,51)2 0,5Gц4 (0,5Lк)2 Gк „ .^Gц3 12 , 1 nr 12
-
mПР.К = — ■—2— + —— •-^ +---—2---= 0,25у + o,125— •-T ++0,125mц4 ■-2,(7)
-
9 L к 9 L к 9L к 9 9 L к LL
или mПРк = 0,25 mк + 0,125mц3 ■ — + 0,125mц4 ■ l|.
. L К
В соответствии с (2) кинетическая энергия системы
Т = Ti + Т2 = " + 2 (mпрс ]£ + Io ф2} ,(9)
где I0 - момент инерции колонны относительно оси О;
-
1 С - центральный момент инерции стрелы в сборе;
У ас - скорость абсолютного движения точки С - точки приведения массы стрелы.
Применим теорему о сложении скоростей, в соответствии с которой абсолютная скорость точки С равна геометрической сумме ее переносной и относительной скоростей:
Уа2с = Уе2 + Vr2c + 2Уес ■ Угс cos у, где Уес , Vrc - скорости переносного и относительного движения точки С;
-
у - угол между направлениями векторов переносного и относительного движения точки С.
На рисунке 2 показана схема для определения скорости абсолютного движения точки С - У ас - точки приведения массы стрелы и груза.
У ес = ОС ■а. ; Угс = L ■ ф .
Из треугольника ОКС
ОС 2 = L 2 K + L 2 — 2L к ■ L cos(фн + ф) .
Из этого же треугольника L ^ = L2 + ОС 2 — 2L^ ОС■ cos С .
Из рисунка 2 следует, что углы у и С равны, как углы со взаимно перпендикулярными сторонами. Следовательно, cos С = cos у =
l2 + ос 2 -С К
2L*OC .
Скорость абсолютного движения
Уа 2 = а2 ■ ОС 2 + ф2 ■ L 2 + 2а ■ ф ■ L^ ОС ■ cos у.
Выразим cos у = cos С через cos(ф Н + ф) .
L2 + ОС —Lm L2 + L +L2 —2L« ■L■COS(ф|-|+ф)—L2 L2 —L/cLI4
cos у = -------- К =---- К------к-----Н—1-—- =1----— I ■ cos(фн + ф) .
-
’ 2L^OC 2L^OC L L-OC J
После подстановки получим:
-
Уа2 = а2 ■ ОС2 + ф2 ■ L2 + 2а ■ ф ■ L ■ ОС ■ [L—-—| ■ cos(фн + ф).(10)
L L^OC
С учетом (10) выражение кинетической энергии принимает вид
Т =
m пр . к -L^a2 + m пр ,с-ОС2-а2 ^ ш пр .с^Ф2 2 2 2
[ LrOC i]'ras(^ + ф )+ '-^
+ m ПР . с • L • ОС • а • ф •
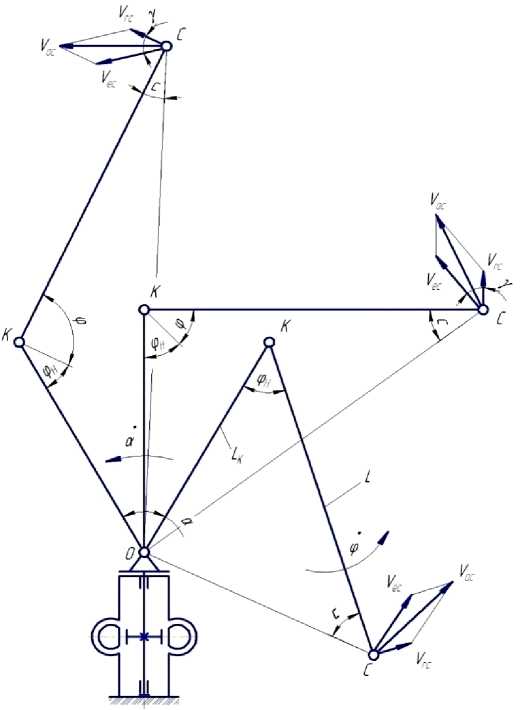
Рис. 2. Схема для определения скорости абсолютного движения точки С при одновременном движении стрелы и колонны: φ н – начальный угол между осями стрелы и колонны; φ – угол поворота стрелы (относительное движение); а - угол поворота колонны (переносное движение); а, ф - угловые скорости колонны и стрелы
Разработка моделей движения системы «технологическое оборудование – груз»
Комбинированными манипуляторами с отклоняющимися колоннами и телескопическими стрелами оснащаются машины для заготовки древесного сырья в виде сортиментов (форвардеры, харвестеры, машины для штабелевки сортиментов, лесопогрузчики). Для погрузки хлыстов и деревьев с кроной с помощью таких машин требуются специальные захваты с устройствами для устранения явления «кострения» деревьев. Такие захваты для оснащения лесопогрузчиков с комбинированными манипуляторами не выпускаются, что затрудняет использование их на погрузке длинномерного древесного сырья. Исходя из этого, при составлении уравнений движения рассматриваемой системы упругие и демпфирующие свойства груза не учитываем.
Дифференцируя выражение кинетической энергии (11) по составляющим уравнений Лагранжа (1), по- лучаем уравнение движение в следующем виде:
4L 2 -L K 1L1 ф [ L-ОС \
• соз(ф н + ф} -
m пр . к ' L K' а + m пр . с . ' ОС 2 ' а + m пр . С ' ОС ' L'
-т пр . с ■ ОС • L - ф2 • [ ^LoCr ] • 5т(ф н + ф } = Q a .
(т пр . с I? + 1 с } ф + т пр . с ■ ОС • «• L • [^ ОССт ] • со5( ф н + ф } = Q ^ .
Определение обобщенных сил Qф и Qa, соответствующих обобщенным координатам системы ф и а
Для определения обобщенных сил Q φ и Q α воспользуемся принципом возможных перемещений системы в направлении возрастания обобщенных координат ф и а - Др и Да . При этом при вычислении обобщенной силы Q ф принимаем Да = 0, а при вычислении Q а Д(р = 0. В качестве активных сил принимаются силы тяжести элементов конструкции и груза G i , усилия на штоках гидроцилиндров Р С и Р . Обобщенная сила принимается в виде коэффициента в выражении суммы элементарных работ активных сил в направлении возможного перемещения:
5 А v = Qv • Д ф ; 5 А а = Qa • Д а.
Определим сумму элементарных работ активных сил в направлении обобщенной координаты φ. При этом Др Ф 0, Да = 0.
При определении обобщенной силы Q φ используем выражения (4), (5) приведенной к точке С массы стрелы m пр.с при горизонтальном положении стрелы. Тогда £ 5 А ^ = ( Р1 sin р —т ПР . С gL) Др .
Qv = Р1 sin р-т Пр . с gL .
Определим сумму элементарных работ активных сил и сил тяжести элементов конструкции в направлении обобщенной координаты а. При этом Др = 0; Д а / 0 . В направлении обобщенной координаты а совершают работу активная сила Р С и силы тяжести элементов конструкции стрелы и колонны. С целью упрощения выражения обобщенной силы Q α приведем силы тяжести элементов конструкции стрелы, груза и колонны к точке K. При этом рассматриваем горизонтальное положение стрелы. Приведение сил к выбранным точкам выполняем исходя из условия равенства моментов приведенной силы сумме моментов приводимых сил относительно любой точки на плоскости (теорема Вариньона).
При определении приведенной к точке K силы тяжести стрелы используем выражения приведенной массы стрелы к точке С при горизонтальном положении стрелы (4), (5) m ПР.С .
Составим уравнение моментов приведенной силы тяжести стрелы к точке С G ПР . С и приведенной силы тяжести стрелы к точке К - G ^ . К относительно оси О.
Отсюда G ПР . К
т пр . с g ( L + LK . cos aj = G Пр . K • LK . cos а 1 .
m nPr g(L+LK . cosa-i) m пр . c gL+m пр . c gLK . cosa -
Li p cosa 1
LK cosa 1
. m пр . c gL
LK . cosa 1
+ т ПР . С g .
Определим приведенную к точке К силу тяжести элементов конструкции колонны и гидроцилиндров привода исполнительных механизмов G C , G Ц4 , G Ц3 . При этом воспользуемся выражениями (7), (8) определения приведенной массы указанных элементов конструкции к точке K:
G Пр . к = т пр . к g . (16)
Тогда £ 5 А a = [ Р с • sin а2 • 1 9 - ( G ПР . к + G ПР . к )LK . cos а 1] Да .
Q a = Рс sin а 2 • 1 9 — ( G пр . к + G пр . К } LK - cos а 1 .
Так как переносное движение системы является вращательным и при одновременном вращении колонны и стрелы расстояние ОС (рис. 3) постоянно возрастает, возникает поворотное (кориолисово) ускорение ω С и кориолисова сила инерции F C .
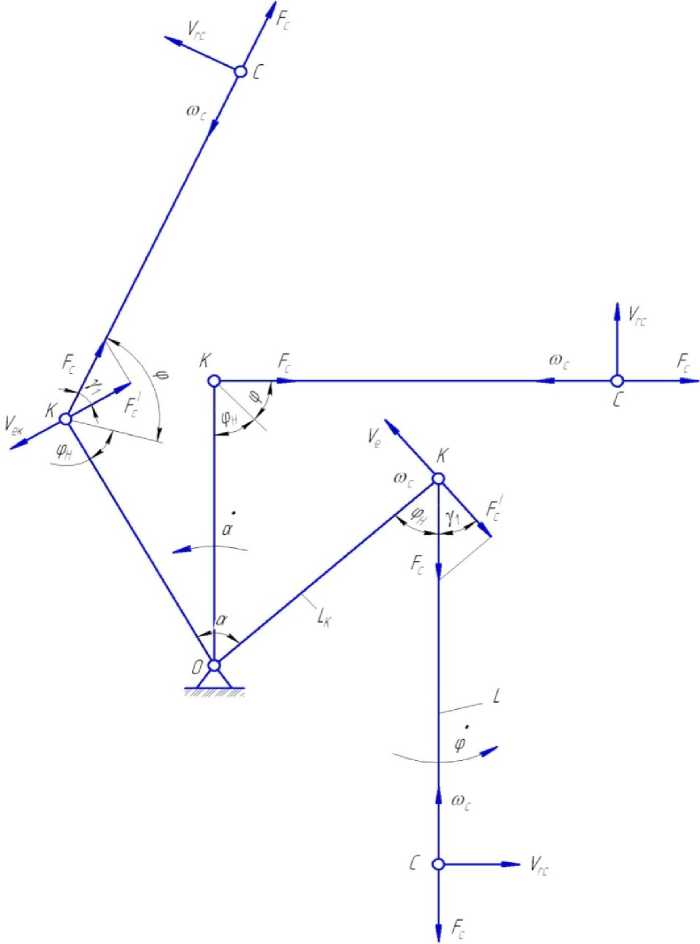
Рис. 3. Схема для определения ускорения кориолиса и кориолисовой силы инерции: ω С – кориолисово ускорение; F C – кориолисова сила инерции; V ℓc, V rc – линейные скорости переносного и относительного движения точки С
Кориолисово ускорение определяется по формуле
а) с = 2d -Vrc = 2d • ф • L .
С учетом момента от кориолисовой силы инерции обобщенная сила принимает вид
Qa = Рс- sin d 2 • 1 9 - ( G ПКр . к + С С . к )LK • cos d i - 2m Пр . c -d -ф -L-L K ■ cos / i . (17)
С учетом выражений (14) и (17) уравнения движения рассматриваемой динамической системы принимают следующий вид:
т пр . К ’ L K • а + т пр . с . • ОС 2 • а + т пр . с • ОС ■ L- ф
'L2 - L К -L L^OC
• cos ( ф н + ф) -
L 2 - L К •L
— т пр . с ■ ОС^ L^ ф2 ■ • sin ( ф н + ф) =
L • ОС
= Р с • sin а2 • 1 9
-
( G Пр . к + G Ср . к )LK . cos a i - 2т пр . с •а •ф -L^L к ■ cos Y i .
(т пр . с L2 + 1 с )ф + т пр . с ■ ОС • a-L-^ ^^^- ]• cos ( ф н + ф) = Р1 sin 0-т пр . с gL. (18)
Заключение. В результате выполненной работы получена система неоднородных дифференциальных уравнений второго порядка, являющихся основой математических моделей лесопогрузчиков поворотного типа при работе в режиме подъема груза. Из уравнений следует, что состояние нагруженности элементов конструкции лесопогрузчика зависит от ряда конструктивных и эксплуатационных факторов.
