Разработка основных этапов методики выбора проектных параметров подрессоренных систем автотранспортного средства

Автор: Волченко Татьяна Сергеевна, Шефер Леопольд Анатольевич
Рубрика: Расчет и конструирование
Статья в выпуске: 11 (144), 2009 года.
Бесплатный доступ
Разработана методика выбора проектных параметров механических систем, работающих в условиях динамических нагрузок, которая позволит построить наиболее оптимальную систему подрессоривания автотранспортного средства. Суть методики заключается в том, чтобы, исходя из условий эксплуатации и назначения проектируемого агрегата, установить наиболее приемлемые параметры жесткости и демпфирования с целью обеспечения удовлетворительного уровня вибрации и долговечности системы, снижения динамических нагрузок на ее элементы, а также выполнения различных условий, связанных непосредственно с проектируемой системой и условиями ее работы.
Динамическая система автотранспортного средства, микропрофиль дороги, спектральное воздействие
Короткий адрес: https://sciup.org/147151458
IDR: 147151458 | УДК: 29.113
Development of the basic stages of methods of choosing the project parameters of vehicle sprung systems
The methods of choosing the project parameters of mechanical systems, working in conditions of dynamic load, which will allow building the most optimal system of vehicle springing is developed. The main point of these methods is to choose the most acceptable parameters of rigidity and damping by taking into account the operation conditions and the purpose of the projected device in order to provide the satisfactory level of vibration and long-life of the system, decreasing the dynamic loads on its elements, and fulfilling various conditions connected with the projecting system and the conditions of its work.
Текст научной статьи Разработка основных этапов методики выбора проектных параметров подрессоренных систем автотранспортного средства
Одним из определяющих параметров при проектировании несущих систем автотранспортного средства является плавность хода, которая должна в первую очередь обеспечивать удовлетворительное физиологическое состояние водителя, среднюю скорость и безопасность движения автомобиля, долговечность его агрегатов. Чтобы проанализировать плавность хода, необходимо обеспечить качество подрессоренной системы автотранспортного средства, которое определяется подрессоренной и неподрессоренной частями автомобиля, подвеской и шинами.
Таким образом, одна из важнейших задач проектирования автомобиля - проектирование его системы подрессоривания, основной частью которой является подвеска. Главные элементы подвески - упругий и демпфирующий элементы и направляющее устройство. Проектная задача заключается в том, чтобы, исходя из условий эксплуатации и назначения автомобиля, установить наиболее приемлемые параметры жесткости и демпфирования с целью обеспечения удовлетворительной плавности хода и долговечности автотранспортного средства, снижения динамических нагрузок на его элементы и на дорогу, по которой оно движется, а также обеспечения максимально возможных устойчивости и управляемости.
Методика расчета представлена на примере автомобиля КАМАЗ 5308, который перевозит груз максимальным весом 7,65 т по дорогам I—III категории с капитальными дорожными одеждами. Вид покрытий: цементобетонный монолитный, железобетонный или асфальтобетонный; расчетная скорость на этих дорогах составляет 50-135 км/ч, допускаемая нагрузка на дорогу - не более 10 т. Примем, что колесная формула проектируемого автотранспортного средства 4x2.
Для поиска оптимальных параметров подвески автомобиля, в первую очередь необходимо определить, какое количество осей должно иметь проектируемое автотранспортное средство, а также его базу L, то есть расстояние между этими осями.
Расчет и конструирование
После того, как определена колесная база автомобиля и установлено, что нагрузка на дорогу со стороны передней и задней осей не превышает допустимую установленными нормами, анализируется одномассовая схема системы подрессоривания на одной опоре. Такая система позволяет рассчитать жесткостные и демпфирующие параметры без учета влияния неподрессоренных масс и определить основные значения промежутков оптимальных параметров жесткости и демпфирования. После того, как эти промежутки определены, необходимо произвести их уточнение исходя из ряда условий.
В первую очередь это условие влияния неподрессоренных масс на вертикальные колебания системы, где рассматривается двухмассовая схема динамической системы (рис. 1, а). Это позволит уточнить промежуток значений жесткости ср и демпфирования кр, а также определить наиболее приемлемое значение жесткости шин cw.
Далее нужно перейти к анализу одномассовой системы на двух опорах (рис. 1, б). Данный этап необходим для определения степени влияния запаздывания между осями автомобиля на величины жесткостных и демпфирующих параметров системы подрессоривания.
Во время движения автомобиля по неровной дороге, может произойти пробивание подвески. Для того чтобы избежать этого, необходимо найти вероятность ее пробивания также для каждой конкретной схемы и при различных скоростях движения. Спектральная плотность динамического хода колеса равна [1]:
8ДЮ)Ци^ЦХи, где Sq(co) - спектральная плотность микропрофиля, |^у(/щ)| = |1-И^,(/<у)| - передаточная функция от микропрофиля дороги к колесу, W/ico) - передаточная функция вертикальных колебаний автомобиля, to - частота процесса. Величина Sf(®) характеризует влияние скорости движения автомобиля, характеристики рессор и амортизаторов, и дорожных условия на динамический ход колеса. Дисперсия динамического хода колеса
1 ”
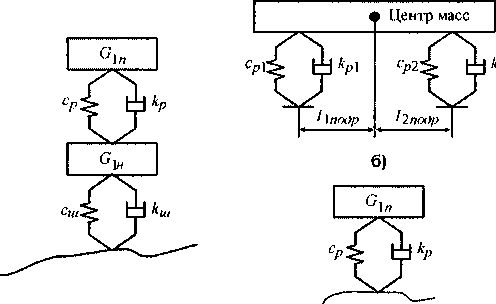
Рис. 1. Расчетные схемы динамической системы
= - f-S*(a^dco, вероятность пробивания подвески е 2 Л
Р(/д >/,)=", ^2^»1,
Ы2тг Of где Jd - конструктивный динамический ход колеса, который выбирают в зависимости от допускаемого значения вероятности пробивания подвески при расчетном режиме.
Если при полученных значениях параметров системы подрессоривания вероятность пробивания подвески высо- ка, то нужно либо увеличивать конструктивный динамических ход с помощью увеличения до рожного просвета, либо менять параметры подвески.
Следующий необходимый этап - определение вероятности отрыва колеса от грунта. Число отрывов определяется следующим образом:
1 ^р 2<т ---е * 2тг ст где о-р
= 1 fs-/^
о
=1 tspw®
- дисперсия скорости изменения нагрузки;
8р(ю) = \ср-ОХн®2 +i®kp
~(ср + icokp)Wz(ia)')\ Sq(cd) - энергетический спектр реакции грун та; G1H - вес неподрессоренных частей груженого автомобиля.
Волченко Т.С., Шефер Л.А. Разработка основных этапов методики выбора проектных параметров подрессоренных систем автотранспортного средства
Последним пунктом необходимо произвести построение нагрузочной характеристики упругого элемента - линейной зависимости вертикальной нагрузки на колесо Р: от массы подрессоренной части подвески и прогиба hz, которые измеряют в центре пятна контакта. Нагрузочная характеристика изменяется по закону показательной функции при Pz >Pzcm [3]:
Р; = Р=^т exp
^ -h.- cm h:cm
При этом она обеспечивает постоянную частоту собственных колебаний для небольших значений перемещений независимо от статической нагрузки. Необходимость построения нагрузочной характеристики упругого и демпфирующего устройств заключается в том, что, исходя из ее анализа, можно выяснить потребность в установке дополнительного корректирующего упругого элемента. Такой элемент позволит снизить амплитуду колебаний, а также обеспечит более быстрое их затухание, что приведет к снижению уровня вибрации.
Определим основные промежутки оптимальных значений параметров жесткости и демпфирования для передней подвески автомобиля КАМАЗ 5308. Согласно предложенной выше методике начнем с геометрического анализа системы подрессоривания, то есть с определения базы автомобиля. В нашем случае база автомобиля - это расстояние от передней до задней оси, так как проектируемый автомобиль имеет колесную формулу 4x2. Число осей увеличивают с целью повышения грузоподъемности при заданной нагрузке на ось, а также улучшения плавности хода и проходимости. Главным условием определения базы служат нормы распределения осевых нагрузок (табл. 1), которые направлены на обеспечение удовлетворительных тягово-сцепных свойств грузовых автомобилей.
Таблица 1
Распределение осевых нагрузок у грузовых автомобилей, %
|
Группа автомобиля и нагрузка на ось/тележку, кН |
Колесная формула |
Нагрузка, приходящаяся на ось автомобиля полной массы |
Нагрузка, приходящаяся на ось снаряженного автомобиля |
|||
|
переднюю |
заднюю |
переднюю |
заднюю |
|||
|
1 |
60/110 |
4x2 |
24...30 |
70...76 |
45...49 |
51...55 |
|
6x4 |
25...28 |
72...75 |
42...47 |
53...58 |
||
|
2 |
80/140 |
4x2 |
25...31 |
69...75 |
46...53 |
47...54 |
|
6x4 |
22...24 |
76...78 |
33...44 |
56...67 |
||
|
100/180 |
4x2 |
33...38 |
62...67 |
51...58 |
42...49 |
|
|
6x4 |
23...29 |
71...77 |
41...47 |
53...59 |
||
Известно, что, проектируя автомобиль с минимально возможной колесной базой, мы можем уменьшить его массу и угол поворота. Поэтому рекомендуется размещать узлы и агрегаты по возможности ближе к передней части автотранспортного средства.
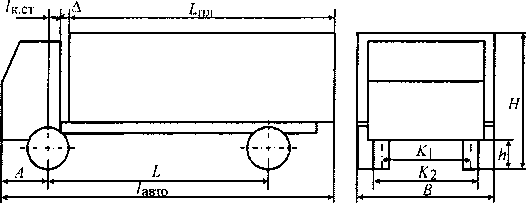
Рис. 2. Схема основных компоновочных параметров грузового автомобиля
Основными компоновочными параметрами грузового автомобиля являются (рис. 2): габаритная длина /авто = 9,65 м, габаритная высота Н, габаритная ширина В = 2,47 м, передний свес А = 1,27 м, расстояние от оси переднего моста до задней стенки кабины /к ст = 0,75 м, зазор между каби- ной и платформой А = 0,075 м, длина платформы £пл = 7,4 м, колесная база автомобиля L, дорожный просвет h = 0,2 м, колея передних колес Кл = 2 м, колея задних колес
Кг = 1,9м. Также согласно стандарту СЭВ, установлены значения минимального угла въезда и минимальной высоты буфера: у > 25°, hx = 0,6 м. В табл. 2 приведены основные размерные параметры компоновки грузовых автомобилей. Как видим, соответствующие величины проектируемого автомобиля удовлетворяют установленным стандартам (отмечены жирным шрифтом в табл. 2) [4].
Расчет и конструирование
Таблица 2
Основные размерные параметры компоновки грузовых автомобилей
|
Схема компоновки автомобиля |
Полная масса автомобиля, т |
А, м |
^К.СТ» М |
ЬПл^ |
Кх, м |
Л2, м |
h, м |
|
4x2, кабина над двигателем |
до 6,5 |
0,85...1,25 |
0,4...0,9 |
1,3...1,5 |
1,6...1,8 |
1,4...1,7 |
0,16... 0,195 |
|
6,5-12,0 |
1,15...1,4 |
||||||
|
12,0 -16,0 |
1,25...1,45 |
0,24...0,65 |
1,7...2,0 |
1,6...1,9 |
0,2... 0,25 |
||
|
более 16,0 |
1,35...1,5 |
0,2...0,5 |
1,8...2,05 |
1,7...1,9 |
0,245... 0,3 |
Значение колесной базы автотранспортного средства определяется из условия равенства нулю суммы моментов относительно переднего моста:
где G, - масса агрегатов автомобиля, /, - координаты центров тяжести агрегатов, G,p - масса груза, 1гр - координата центра тяжести груза, Gizp - нагрузка от задней оси груженого автомобиля на дорогу, GlH - задняя осевая нагрузка от неподрессоренных масс. В результате расчетов получено, что L = 5,43 м. Отношение длины платформы к колесной базе проектируемого автомобиля L^l Ь = 1,4/ 5,43 = 1,4 соответствует установленным нормам (см. табл. 2).
Определив колесную базу, можно рассчитать следующие величины:
Yg, I,
G2ch = ~ 3’53 т (47% полной массы автомобиля) - нагрузка на дорогу от задней оси снаряженного автомобиля;
GXra=Ga ~G2ch = 3,87 т (53% полной массы автомобиля) - нагрузка на дорогу от передней оси снаряженного автомобиля, где Ga - масса снаряженного автомобиля;
G-33% 15-33% с „ _
СХгр= 1009х = 1009х = 5 т - сгрузка на дорогу от передней оси груженого автомобиля (33% полной массы автомобиля);
G2ep = G-G12p —15 — 5 = 10т - нагрузка на дорогу от задней оси груженого автомобиля (67% полной массы автомобиля), где G - полная масса автомобиля;
I = 0,344 ■ 106 кг-м2; £у =1,1 - момент инерции и коэффициент распределения подрессоренных частей груженого автомобиля.
Исходя из полученных результатов компоновки видно, что проектируемый автомобиль обладает хорошей проходимостью, так как коэффициенты сцепного веса снаряженного автомобиля k Реакции на левое и правое колеса передней оси груженого автомобиля: R]n = R^ = 2,1-104Н. Реакции на левое и правое колеса задней оси груженого автомобиля R2n = R2л = 4,4-104 Н. Определив базу автотранспортного средства, проведем анализ непосредственно системы подрессоривания. Эта система представляется как распределенная масса, которая в процессе своего движения по дорогам любого типа совершает вертикальные, продольно-угловые и поперечно-угловые колебания на двух или более упругих опорах - неподрессоренных массах, в которые входят упругое и демпфирующее устройство и шины, обладающие определенной жесткостью и демпфированием. Для того чтобы определить первоначальные значения промежутков оптимальных коэффициентов жесткости ср и демпфирования кр, необходимо проанализировать одномассовую систему подрессоривания (рис. 1, в). Рассматривать такую систему необходимо как для передней, так и для задней подвесок. Анализ проводится на основе исследования уравнения среднего Волченко Т.С., Шефер Л.А. Разработка основных этапов методики выбора проектных ________________________параметров подрессоренных систем автотранспортного средства квадратического отклонения на экстремум. Это означает, что, определив амплитудно-частотную характеристику вертикальных колебаний системы 1 1 ус1й2(а0-й)У ^a^G)1 где ati=cp,GXn; ax=kp)GXn; G\„ - приведенная подрессоренная масса, расположенная над передними подвесками груженого автомобиля, а также спектральную плотность дорог I-III типов 5Д®) = ^, (1) (О необходимо составить выражение для дисперсии ускорений вертикальных колебаний: (2) о В представленных выше формулах v - скорость движения автомобиля, S™ - спектральная плотность воздействия для III типа дорог, Do - коэффициент, который зависит от состояния дорожной поверхности (т. е. от уровня спектральной плотности воздействия), значения Do в зависимости от уровня спектральной плотности представлены в табл. 3. Отметим, что в случае, когда рассматривается одномассовая система (см. рис. 1, в), необходимо уточнить спектр возмущений в высокочастотной области [2]: 8™(®) = ^ —^у (3), Щ 02 + ®3 где ®3 = ^/о, -<у2 - частота среза, Гц; ®х = v ■ ^, ®2 = v ■ Л2 - дорожные частоты, Гц, 2] и 22 - коэффициенты дорожных частот. Значение частоты среза также зависит от состояния дорожной поверхности (см. табл. 3). Таблица 3 Значения параметра О» частоты среза шз Значение Do, м Значение о3, Гц Примечание 10~4 0,0316 Очень малый уровень спектральной плотности 2,08хЮ”3 1,596 Малый уровень спектральной плотности 3,16хЮ"3 3,16 Средний уровень спектральной плотности Для дорог Ш-го типа со средним уровнем спектральной плотности выражение дисперсии амплитуд вертикальных колебаний одномассовой системы имеет вид: Df=— Ш(®)\28™(<^® = D0v®3 cp®3 (^ + GXncp) + ^>2 ^„kp GXn®3+cp-vkp®3 Согласно нормам VDI ощущения человека во время колебаний оцениваются по ускорениям при частотах ®0= 0,5...5 Гц. Следовательно, число колебаний в минуту варьируется в промежутке 30 п = — ®0 =47,746...4,775, а статический прогиб упругих элементов находится в пределах 25 fcm= — = 1,097...0,011 м. п Исходя из этого, можно установить, что жесткость упругого элемента может принимать следующие значения: с = ^ = 1,912-104...1,912-106Н/м, где Ра, - вертикальная статическая нагрузка на переднее колесо от массы подрессоренной части автомобиля. Для скорости автомобиля v=19 м/с наиболее оптимальное значение жесткости находится в промежутке ср = 1,442 • 1О5...2,47 • Ю5 Н/м, так как эти значения дают величины собственных час- Расчет и конструирование тот колебаний подрессоренных масс р, =1,3.„1,7 Гц. Данные значения входят в требуемый диа пазон частот собственных колебаний для грузовых колесных машин, который составляет р^ =1,3... 1,7 Гц. Рассмотрим величины, соответствующие границам диапазона оптимальных коэффициентов жесткости: с1р = 1,442 • 105 Н/м, с” =2,47-105 Н/м. Оптимальные значения коэффициента демпфирования, соответствующие ранее найденным оптимальным значениям коэффициента жесткости, найдем из условия равенства нулю частной производной по кр от дисперсии амплитуд вертикальных колебаний (2). Рис. 4. Зависимость средних квадратичных значений ускорений вертикальных колебаний одномассовой системы от сопротивления амортизаторов при скорости 19 м/с: 1 - значение жесткости с„-1,442-105 Н/м; 2 - значение жесткости ср-2,47-105 Н/м Из рис. 4 видно, что при увеличении жесткости рессор возрастает и величина средних квадратичных значений ускорений, при этом построенные кривые имеют четкий минимум. В связи с этим можно сделать вывод о том, что при установке амортизатора с сопротивлением, значительно меньшим оптимального, значения средних квадратичных ускорений будут возрастать, что не желательно. Установка амортизатора с сопротивлением большим оптимального даст не только увеличение средних квадратичных ускорений, но и приведет также к большому расходу мощности двига- теля, в результате амортизаторы будут перегреваться. Отметим также, что увеличение жесткости рессор приводит к увеличению сопротивления амортизатора, а при большей жесткости даже не значительные изменения демпфирования приводят к серьезному увеличению значений/).. Таким образом, выберем промежуток значений демпфирования, соответствующих установленному промежутку значений жесткостей кр= 2,248 • 104...3,051 • 104 Нс/м (см. рис. 4). Проанализируем, как влияет изменение скорости движения автомобиля на зависимость ТА(кр) (табл. 4). Таблица 4 Влияние изменения скорости движения автомобиля на величину СКЗ вертикальных колебаний автомобиля Скорость движения автомобиля Граничные значения промежутка к„ Граничные значения промежутка с„ Та v1 = 19 м/с к\ =2,248-104 Н-с/м Ср = 1,442 ■ 105 Н/м Та’ =1,539 м/с2 к" =3,051-104 Н-с/м с" =2,47-105 Н/м 1—п о =1,851м/с2 v1 = 38 м/с g= 2,248-104 Н-с/м 4 =1,442-105 Н/м ТА =2,117 м/с2 к" =3,051-104 Н-с/м с" =2,47-105 Н/м /------II V11 д/А ’ =2,618 м/с2 Исходя из данных табл. 4 и рис. 4 можно сделать вывод, что увеличение скорости влечет за собой увеличение величины ^[D^. Существуют нормы, которые ограничивают величины средних квадратичных значений ускорений. Р.В. Ротенберг на основании анализа ускорений головы человека при различных режи мах движения предложил предельные значения ^Du , ^Dy , ^D^ , которые приведены в табл. 5. Согласно ОСТ 37.001.291-84 «Технические нормы плавности хода» эти значения уточнены для движения автотранспортного средства по конкретному типу дорог (табл. 6). Таким образом, /----I,v* /----уст ।-----П,*п /----уст ^D5 < ^D, и ^Dj < ^D^ , а оптимальное значение сопротивления амортизатора ос тается неизменным. Волченко Т.С., Шефер Л.А. Разработка основных этапов методики выбора проектныхпараметров подрессоренных систем автотранспортного средства Таблица 5 Таблица 6 Предельные знач эния средних квадратичных ускорений Предельные технические нормы плавности хода грузовых автомобилей Режим движения Та ТА Тип дороги Корректированные значения виброускорений на сиденье, не более в характерных точках подрессоренной части, м/с2 Медленная ходьба 1,0 м/с2 0,6 м/с2 0,5 м/с2 Обычная ходьба 2,5 м/с2 1,0 м/с2 0,7 м/с2 ^кор, м/с2 м/с2 ТА^’ м/с2 Непродолж. бег 4,0 м/с2 2,0 м/с2 1,0 м/с2 далее проанализируем влияние ухудшения типа дорожной поверхности на зависимость ^(кр) (табл. 7). I I 1,00 0,65 0,65 <1,30 II 1,50 1,00 0,80 <1,80 III 2,30 1,60 1,60 <2,70 Таблица 7 Изменение зависимости ^D^^kp) при условии движения автомобиля по дорогам I, II, III типов V, м/с В», м й>з, Гц Для граничного значения жесткости Ср =1,442-105Н/м Для граничного значения жесткости с” = 2,47-Ю5Н/м Гр, Н-с/м 1-------1 7 ’м/с ^ Н-с/м ^D;: , м/с2 19 ю~4 0,0316 2,4983-Ю4 3,305-10"3 3,2688-Ю4 3,782-Ю"3 2,08-10’3 1,596 2,4156-Ю4 0,699 3,2022-Ю4 0,818 3,16-1 О*3 3,16 2,248-Ю4 1,54 3,0511-Ю4 1,851 38 -II- -II- -II- 4,674-Ю~3 -11- 5,348-Ю-3 0,989 1,157 2,177 2,618 Исходя из данных табл. 7, можно сделать заключение о том, что ухудшение дорожного полотна приводит к увеличению значения Та", однако, при возможных скоростях движения грузового автомобиля величина ^57 не превосходит установленного стандартами максимума. Таким образом, определили основные промежутки оптимальных значений параметров ср = 1,442 • 1О5...2,47 • 105 Н/м и кр = 2,248 • 1О4...3,О51 • 104 Н-с/м. Стоит отметить, что применение изложенной выше методики даст возможность более обоснованно рассчитывать упругие и демпфирующие элементы систем подрессоривания, на стадии проектирования машины увеличить ресурс автомобиля в целом и отдельных его агрегатов в частности, а также максимально снизить вибронагрузки на водителя и пассажиров, что приведет к более комфортной эксплуатации проектируемого автотранспортного средства.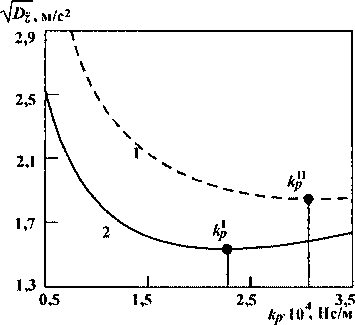
Список литературы Разработка основных этапов методики выбора проектных параметров подрессоренных систем автотранспортного средства
- Силаев, A.A. Спектральная теория подрессоривания транспортных машин//A.A. Силаев. -М.: Изд-во «Машиностроение», 1972. -190 с.
- Хачатуров, А. А. Динамика системы дорога-шина-автомобилъ-водитель/A.A. Хачатуров, В.Л. Афанасьев, B.C. Васильев. -М.: Машиностроение, 1976. -536 с.
- Полунгян, A.A. Проектирование полноприводных колесных машин//A.A. Полунгян. -М.: Изд-во МГТУим. Н.Э. Баумана, 2000. -637 с.
- Высоцкий, М.С. Грузовые автомобили. Проектирование и основные конструкции/М.С. Высоцкий, Л.Х. Гилелес, С.Г. Херсонский. -М.: Машиностроение, 1995. -256 с.
