Разработка приемного датчика эллиптической формы для специализированного магнитно-резонансного томографа с полем 0.4 Тесла

Автор: Баязитов Альфис Альбертович, Фаттахов Я.В., Хундиряков В.Е.
Журнал: Научное приборостроение @nauchnoe-priborostroenie
Рубрика: Работы с конференции
Статья в выпуске: 1 т.29, 2019 года.
Бесплатный доступ
Абота посвящена математическому расчету, разработке конструкции и измерению радиочастотных характеристик опытного образца приемного датчика для специализированного магнитно-резонансного томографа. Представлены результаты математического моделирования однородности поля для приемного датчика в зависимости от его конструктивных особенностей. Проведен сравнительный анализ результатов двух видов контуров - цилиндрической и эллиптической формы. По результатам моделирования собраны экспериментальные образцы приемного датчика, и представлены результаты измерений их радиочастотных характеристик.
Мрт, расчет распределения магнитного поля, датчик "кисть", приемный датчик
Короткий адрес: https://sciup.org/142218198
IDR: 142218198 | УДК: 53.087.47 | DOI: 10.18358/np-29-1-i9298
Design of an elliptical coil for a specialized magnetic resonance scanner with a 0.4 Tesla field
The work is devoted to mathematical calculation, development of designs measurement of radio frequency characteristics of the coil for a specialized magnetic resonance scanner. The results of mathematical modeling of the field homogeneity, for the receiving coil, are presented depending on its design features. A comparative analysis of the results of two types of contours are made: cylindrical and elliptical. Based on the results of the simulation, experimental samples of the receiving coil are manufactured and the results of measuring their radio-frequency characteristics are presented.
Текст научной статьи Разработка приемного датчика эллиптической формы для специализированного магнитно-резонансного томографа с полем 0.4 Тесла
Разработка приемного датчика, описанная в данной статье, ориентирована на использование в специализированном малогабаритном травматологическом томографе с напряженностью поля 0.4 Тл на постоянном магните. Так как данный тип томографа отличается от крупногабаритных "на все тело человека" размерами своего магнита, соответственно это накладывает определенные требования на приемо-передающую систему.
Данные аппаратные комплексы имеют ряд преимуществ: они мобильны и могут быть установлены на грузовой транспорт, оборудованный под медицинские цели. Специализированные томографы можно использовать для медицинских исследований суставов человека, а также в сфере научных исследований мелких животных или промышленных исследований кернов. Они не требуют водяного или гелиевого охлаждения, что существенно уменьшает сложность и стоимость его обслуживания.
В работе в качестве прототипа мы взяли датчик цилиндрической формы. Расчеты проводились с учетом теории распределения магнитных полей по закону Био—Савара—Лапласа [1] и теории получения наилучшей однородности распределения радиочастотного поля от катушек Гельмгольца [2] и катушек Бэйкера [3]. В работе проводилось математическое моделирование приемного датчика. С учетом полученных результатов были собраны опытные образцы и проведены экспериментальные измерения однородности магнитного поля вдоль основных осей, а также измерены радиочас- тотные характеристики датчиков.
КОНСТРУКТИВНЫЕ ОСОБЕННОСТИ ДАТЧИКОВ
Одна из конструктивных особенностей специализированного малогабаритного травматологического томографа заключаются в том, что область, в которой располагается приемно-передающая система, мала и составляет 210 мм. Для исследования объектов различных размеров создаются несколько сменных узкопрофильных приемных датчиков. Если в крупногабаритных томографах расстояние между передающим контуром и приемным датчиком составляет порядка 300–500 мм, то в малогабаритных томографах приемный датчик и передающий контур расположены на расстоянии порядка 5 мм. То есть в малогабаритных томографах каждая сменная узкопрофильная приемно-передающая система обязательно включает в себя приемный датчик и передающий контур в одном корпусе. В таких системах передающий контур располагается ближе к магниту и дальше от "области интересов", а приемный датчик располагается внутри передающего контура, ближе к "области интересов". Учитывая вышеперечисленные особенности томографа, следует, что конструкция данного типа приемно-передающей системы накладывает некоторые ограничения, которые стоит учитывать при расчетах и непосредственной разработке таких систем. Данный тип конструктивной особенности может приводить к взаимным влияниям контуров, что также следует учитывать.
Рассматривая конструктивные особенности приемных систем, их можно разделить на контур цилиндрической формы (который ориентирован на прием сигнала в области крупных суставов, в дальнейшем будем именовать его датчиком "Сустав") и контур эллиптической формы (ориентирован на прием сигнала от малых суставов, таких как кисть руки, его мы будем именовать датчиком "Кисть"). У каждого датчика есть "области интересов"— область, в которой датчик принимает ЯМР-сигнал, т.е. в этой области датчик должен обеспечивать однородный прием радиочастотного сигнала. Рассматривая геометрическое положение датчика относительно томографа и его основные оси приема, следует указать, что ось Z направлена вдоль постоянного поля магнита B 0 , ось Y направлена вертикально вверх, а ось X — вдоль кисти руки. Длина датчика вдоль его основной оси X не должна превышать 200 мм.
Разрабатываемый датчик "Кисть", как и датчик "Сустав", являются датчиками объемного типа. Преимущество датчика "Кисть" в том, что он имеет меньший размер по сравнению с датчиком "Сустав", за счет чего увеличивается величина принимаемого сигнала от исследуемого объекта.
Важной характеристикой приемного датчика является однородность радиочастотного поля, влияющая на корректное отображение структуры объекта в получаемых изображениях. Однородность поля связана с конфигурацией катушек. Оценка относительной неоднородности распределения магнитного поля от контура с током как в экспериментах, так и математических моделях оценивались по формуле [4]
t ( В . - В ) 2
A 1 = 1 ________________________
5 В = -—=—, (1)
В где δВ — велина неоднородности поля в заданной области, Вi — значение величины индукции магнитного поля (сигнала) в i-й точке наблюдения, В — среднее значение индукции магнитного поля (сигнала), n — общее число точек в заданной облати. Область интересов, в которой производилась оценка однородности магнитного поля по формуле (1) следующая: вдоль оси Х — 150 мм, вдоль оси Y — 100 мм, вдоль оси Z — 60 мм. Hеоднородность радиочастотного поля должна составлять менее 10 %.
Также важным параметром, который влияет на величину сигнала, является добротность контура. Она связана с шириной полосы частот контура и зависит в свою очередь от числа витков, индуктивности контура и толщины проводника. Выбор шага между витками влияет на габаритные разме- ры контура. Также от шага зависит индуктивная и "паразитная" (нежелательная) емкостная составляющие контура. С уменьшением шага емкостная составляющая контура увеличивается [5, 6].
При конечной настройке на рабочую частоту в приемную систему включается дополнительный контур для отстройки резонансной частоты основного приемного контура во время действия передающего импульса [6].
В ходе экспериментов для измерения радиочастотных характеристик различных конфигураций приемного датчика нами использовался специальный зонд [7]. Зонд имитирует сигнал ("Эхо") в ЯМР-эксперименте.
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ
При разработке конфигураций датчиков активно применяются методы математического моделирования [8]. Математическое моделирование магнитных полей от контуров с током проводилось с помощью среды программирования "maple", имеющейся в свободном доступе. Для расчета индукции магнитного поля использовался закон Био—Савара—Лапласа для "тонкого" провода [1]:
B = ^ °L Jd r , 4 π r 2
где B — индукция магнитного поля, µ 0 — магнитная постоянная, I — ток в проводнике, r — длина радиус-вектора.
В математических моделях величина тока была постоянной и равно 5 мкА. В реальном эксперименте в катушках приемного датчика наводится э.д.с. В экспериментах по математическому моделированию решается обратная задача — в моделируемой катушке протекает ток заранее заданной величины, создавая магнитное поле, которое рассчитывается по формуле (2). В работе проводилось математическое моделирование приемных катушек и расчет объемного распределения магнитного поля при варьировании параметров контуров (рис. 1).
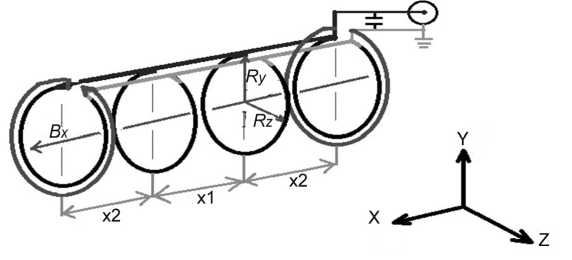
Рис. 1. Схема датчика с 6 витками
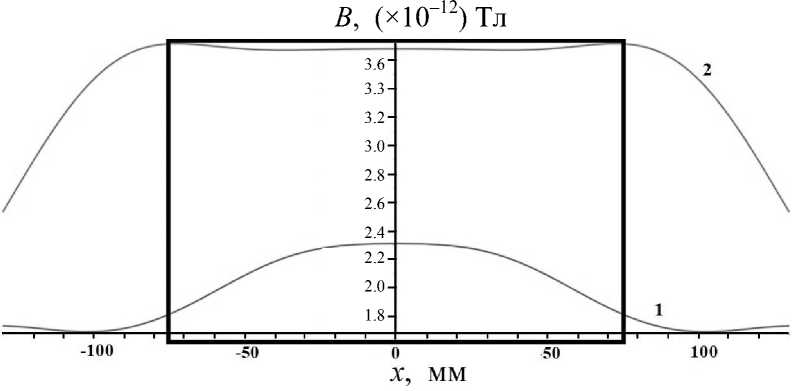
Рис. 2. Расчет распределения индукции магнитного поля вдоль оси X ( y = 0 мм, z = 0 мм) от 4 витков (1) и от 6 витков (2) для оптимальных значений параметров контура
B, (×10–12) Тл

Рис. 3. Расчет распределения индукции магнитного поля от контура с 6 витками вдоль оси X, при Ry = 80 мм для
-
1) Rz = 70 мм, x1 = 45 мм, x2 = 60 мм;
-
2) Rz = 60 мм, x1 = 40 мм, x2 = 60 мм;
-
3) Rz = 50 мм, x1 = 35 мм, x2 = 60 мм;
-
4) Rz = 40 мм, x1 = 35 мм, x2 = 50 мм
x, мм
На рис. 1 представлен общий вид датчика, где параметры x1 и x2 — расстояния между соседними витками датчика. Параметры Rz и Ry — полуоси эллипса. При Rz = Ry производилось моделирование датчика цилиндрической формы. В датчике с 4 витками вторые (внешние) кольца на краях контура отсутствуют.
Hа первоначальном этапе в работе оценивалась однородность поля для цилиндрического датчика с 4 витками как основа для сравнения при дальнейшем увеличении числа витков до 6 с последующей оптимизацией, а затем переходом к эллипсу.
Hа рис. 2 представлены результаты математического моделирования контура цилиндрической формы с 4 и 6 витками. Данные графики представлены для моделей контуров с оптимизированными параметрами x1 и x2, при которых размер датчика не выходит за пределы 200 мм и на графиках наблюдается наилучшая однородность. Из графиков на рис. 2 видно, что область однородности расширяется с переходом от 4 к 6 виткам. Дальнейшее увеличение числа витков приводит к увеличению области однородности, но одновременно — к увеличению размеров датчика, что неприемлемо для данного типа томографов. На рисунках черной рамкой обозначена область интереса, в которой проводилась оценка неоднородности поля вдоль оси графиков.
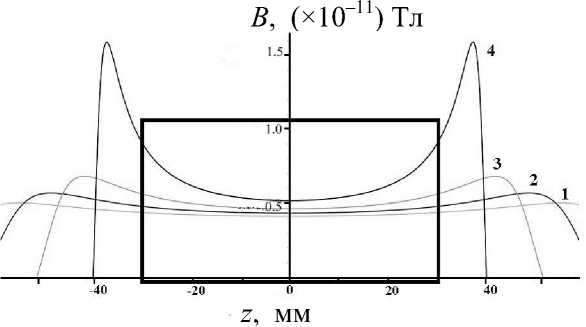
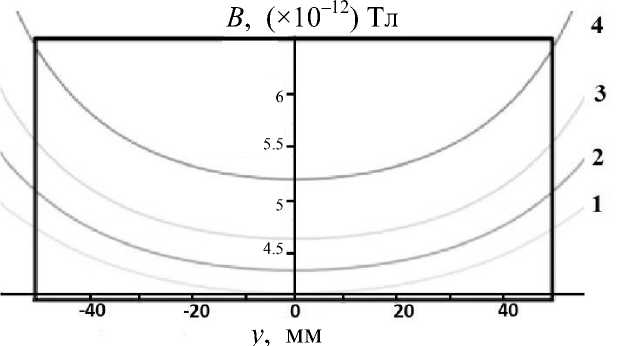
Рис. 4. Расчет распределения индукции магнитного поля от контура с 6 витками вдоль оси Z со сдвигом плоскости наблюдения по оси X на 70 мм от начала координат, при Ry = 80 мм для
-
1) Rz = 70 мм, x1 = 45 мм, x2 = 60 мм;
-
2) Rz = 60 мм, x1 = 40 мм, x2 = 60 мм;
-
3) Rz = 50 мм, x1 = 35 мм, x2 = 60 мм;
-
4) Rz = 40 мм, x1 = 35 мм, x2 = 50 мм
Рис. 5. Расчет распределения индукции магнитного поля вдоль оси Y со сдвигом плоскости наблюдения по оси X на 70 мм от начала координат, при Ry = 80 мм для 1) Rz = 70 мм, x1 = 45 мм, x2 = 60 мм;
-
2) Rz = 60 мм, x1 = 40 мм, x2 = 60 мм;
-
3) Rz = 50 мм, x1 = 35 мм, x2 = 60 мм;
-
4) Rz = 40 мм, x1 = 35 мм, x2 = 50 мм
Оптимальные значения параметров расположения витков (рис. 2) для катушки с 4 витками: Ry = Rz = = 80 мм, x1 = 70 мм, x2 = 60 мм, δВ x = 0.0344; на краях датчика ( x = 70 мм, z = 0 мм) δВ y = = 0.00175; для 6 витков: Ry = Rz = 80 мм, x1 = = 50 мм, x2 = 70 мм, вдоль оси X δВ x = 0.00452, δВ y = 0.00701; на краях датчика ( x =70 мм, z = = 0 мм) δВ y =0.00607. С учетом данных результатов мы остановились на контуре с 6 витками и перешли непосредственно к моделированию эллиптических контуров. В математических моделях параметр Ry оставался постоянным, равным 80 мм, т.е. высота датчика составляет 160 мм. Каждый график, представленный на рис. 3 и 4, соответствует различным значениям параметра Rz , для каждого из которых кострукция была оптимизирована по параметрам x1 и x2.
На рис. 4 приведены графики для контуров с параметрами, аналогичными рис. 3, но плоскость наблюдения сдвинута на край области интересов.
С учетом рассмотренных моделей были рассчитаны однородности поля в заданной области по формуле (1). Конструкция с параметрами Ry = 80 мм, Rz = 60 мм, x1 = 40 мм, x2 = 60 мм, однородность δВx = 0.012 является лучшей по однородности графика 2 на рис. 3; аналогично однородности поля вдоль Y и Z осей в центре датчика для данной конструкции равны δВy = = 0.009, δВz = 0.01. На рис. 4 и 5 плоскость расчета распределения поля была смещена от центра датчика в положение на границе области интереса. График 2 на рис. 4 соответствует варианту датчика с аналогичными параметрами Ry, Rz, x1, x2, указными выше, имеет однородность поля вдоль оси Z, равную δВz = 0.06. График 2 на рис. 5 с параметрами Ry, Rz, x1, x2 аналогично рис. 4 имеет однородность поля вдоль оси Y, равную δВy = 0.05. Данные результаты отвечают наилучшему варианту однородности поля с соответствующими параметрами контура.
РЕЗУЛЬТАТЫ ИЗМЕРЕНИЙ И ОБСУЖДЕНИЕ
В модели расчет проводился для бесконечно тонкого витка по постоянному току. В макетах проявляются некоторые эффекты, не учтенные в модели. На основе проанализированных данных однородности поля множества математических моделей контура по каждому из трех параметров
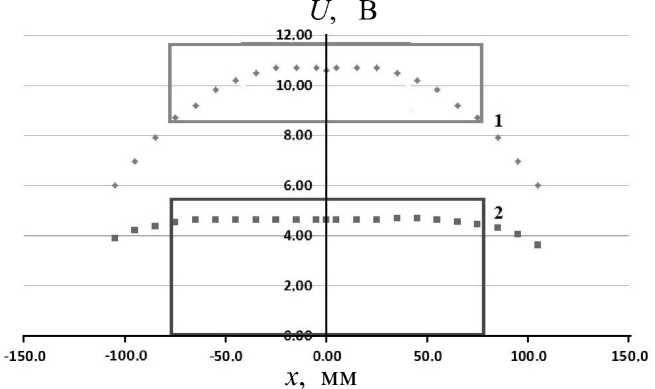
Рис. 6. Измерения сигнала вдоль оси X в области интересов от реального контура.
-
1 — распределение сигнала от контура эллиптической формы, 2 — распределение сигнала от контура цилиндрической формы. Рамкой показана область интереса
Rz , x1, x2 мы выбрали оптимальные значения параметров контура и впоследствии собрали макеты цилиндрического и эллиптического приемных контуров. В экспериментах с реальными макетами дополнительные манипуляции выбора ширины витка влияют на его активное сопротивление, что в свою очередь влияет на величину тока, протекающего в витке. Таким образом можно проследить связь экспериментальных результатов с теоретическими.
В ходе макетирования провели физическое моделирование вблизи выбранных модельных параметров и экспериментальные измерения распределения сигнала вдоль оси X, основной оси приема. Толщина медной ленты для проводника выбиралась из соображения величины скин-слоя на рабочей частоте и равна 100 мкм [6]. Макет с наиболее однородным распределением приема сигнала соответствует параметрам цилиндрического датчика, состоящего из 6 витков: R = 80, x1 = 40, x2 = 80, ширина 20 мм, и параметрам эллиптического датчика, состоящего из 6 витков: Ry = 80, Rz = 60, x1 = 45, x2 = 60, ширина ленты — 10 мм.
На рис. 6 представлены результаты экспериментов по измерению распределения сигнала в области интереса от собранных макетов датчиков эллиптической и цилиндрической формы. Также были измерены радиочастотные параметры датчиков:
-
• рабочая частота приемной системы f = = 17.510 МГц;
-
• параметры цилиндрического контура: Q = 70, U = 4.63 В, δВ x = 0.012;
-
• параметры эллиптического контура: Q = = 170, U = 10.7 В, δВ x = 0.039;
где Q — добротность датчика, U — амплитуда сигнала.
При переходе от контура цилиндрической формы к эллиптической амплитуда сигнала увеличилась в 2.5 раза. Как мы и ожидали, имело место небольшое увеличение неоднородности поля, при том что она оставалась в допустимых приделах 10%. Использование конфигураций контура эллиптической формы целесообразно с точки зрения применения для исследования кистевых суставов человека.
ЗАКЛЮЧЕНИЕ
В данной статье описано исследование и разработка системы "приемного контура эллиптической формы" и сравнение его результатов с контуром цилиндрической формы для специализированного малогабаритного магнитно-резонансного томографа с индукцией магнитного поля 0.4 Тл. Основная ось приема датчика направлена вдоль оси X. Приемно-передающая система ограничена размерами 210 мм, В корпусе датчика должны располагаться сначала передающий контур, внутри него — приемный контур с зазором минимум в 5 мм. Контуры, описанные в данной статье, имеют объемную форму. Датчик эллиптической формы является более специализированным, чем датчик цилиндрической формы и предназначен для исследования кисти руки. Датчик цилиндрической формы — датчик общего назначения, предназначенный для исследования крупных суставов до 150 мм в диаметре.
Описаны методы оценки качественных параметров приемных контуров в настроечном режиме работы.
Оценивая результаты экспериментального измерения сигнала можно сказать, что для исследования малых объектов, таких как кисть человека, целесообразнее применять датчик эллиптической формы т.к. он имеет бóльшую чувствительность по величине принимаемого сигнала, чем датчик цилиндрической формы.
Список литературы Разработка приемного датчика эллиптической формы для специализированного магнитно-резонансного томографа с полем 0.4 Тесла
- Парселл Э. Электричество и магнетизм. Т. 2. М.: Наука, 1971. 444 с.
- Barker J.R. New coil systems for the production of uniform magnetic fields//J. Sci. Instrum. 1949. Vol. 26. Р. 213-215.
- Barker J.R. The magnetic field inside a solenoid//British journal of applied physics. 1950. Vol. 1, no. 3. P. 65-67.
- Корн Г., Корн Т. Справочник по математике. М: Наука, 1977. 630 с.
- Баязитов А.А., Панкратов А.С., Сайкин К.С. Разработка квадратурного датчика "почки" для низкополевого МР-томографа//Сб. ст. "Структура и динамика молекулярных систем". Йошкар-Ола, Уфа, Казань, Москва, 2009. Вып. XVI, ч. 3. С. 264.
- Баязитов А.А., Чумаров П.И., Фаттахов Я.В. Приемный радиочастотный квадратурный датчик "Шея" для магнитно-резонансного томографа//ПТЭ. 2018. Т. 61, № 4. С. 125-131.
- Ред Э. Справочное пособие по высокочастотной схемотехнике: схемы, блоки, 50-омная техника. М.: Мир, 1990. 47 c.
- Cassidy P.J., Grieve S., Clarke K., Edwards D.J. Electromagnetic characterization of MR RF coil using the transmission-line modeling method//Magnetic resonance materials in physics, biology and medicine (magma). 2002. Vol. 14, no. 1. P. 20-29 DOI: 10.1007/BF02668183
