Разработка программно-технического компонента геоинформационной системы для мониторинга экологичности воздушного пространства

Автор: Хейло А.Ю., Хаустов И.А., Рылев С.С.
Журнал: Вестник Воронежского государственного университета инженерных технологий @vestnik-vsuet
Рубрика: Информационные технологии, моделирование и управление
Статья в выпуске: 3 (77), 2018 года.
Бесплатный доступ
В статье рассматривается актуальная проблема загрязненности атмосферного воздуха продуктами техногенного характера, негативно влияющими на экологию окружающей среды и представляющие угрозу для дальнейшего развития человечества и его существования. Одной из задач при решении обозначенной проблемы является своевременный, достоверный и оперативный контроль загрязненности окружающего воздушного пространства. Традиционные средства контроля, как правило, имеют серьезные ограничения в плане применения их над труднодоступными территориями. Кроме того, главными недостатками существующих на данный момент систем экологического мониторинга окружающей среды, способных производить пробоотбор в труднодоступных зонах воздушного пространства являются большая масса и низкая ветроустойчивость конструкций пробоотбора. В работе рассматривается беспилотный летательный комплекс, отличительной особенностью которого является применение автоматизированных пробоотборников, обладающих малыми габаритами и массой. Рассмотрены конструктивные особенности применяемых пробоотборников и комплекс технических средств для управления беспилотным летательным устройством в различных режимах.
Пробоотбор, окружающая среда, геоинформационная система, система управления, экология
Короткий адрес: https://sciup.org/140238688
IDR: 140238688 | DOI: 10.20914/2310-1202-2018-3-92-96
Development of the software and hardware component of the geographic information system for monitoring the environmental friendliness of the airspace
The article deals with the actual problem of air pollution by man-made products that have a negative impact on the environment and pose a threat to the further development of mankind and its existence. One of the tasks in solving this problem is timely, reliable and operational control of pollution of the surrounding air space. Traditional means of control tend to have serious limitations in their application over hard-to-reach areas. In addition, the main drawbacks of the currently existing environmental monitoring systems capable of sampling in hard-to-reach areas of airspace are the large mass and low wind resistance of sampling structures. The paper deals with an unmanned aerial system, a distinctive feature of which is the use of automated samplers with small dimensions and weight. The design features of the used samplers and a set of technical means for controlling an unmanned aerial device in different modes are considered.
Текст научной статьи Разработка программно-технического компонента геоинформационной системы для мониторинга экологичности воздушного пространства
DOI:
Атмосферный воздух – это исключительная среда, которая обеспечивает существование жизни на Земле. Сохранение чистоты воздуха и его естественного состава – важнейшая задача, которая стоит перед современным научным сообществом и перед человечеством в целом. В этой связи чрезвычайно важно своевременно и достоверно осуществлять мониторинг экологичности окружающего воздушного пространства. Особенно это актуально в условиях действующих производств, деятельность которых связана с различными побочными негативными воздействиями на экологию прилегающих территорий. Однако такой мониторинг не всегда удается производить имеющимися традиционными средствами контроля, (наземного базирования, переносными, портативными – предназначенные для контроля загрязненности воздуха в приземном слое1), некоторые из них представляют собой переносные портативные лабораторные комплексы.
Зачастую локальный экологический мониторинг требуется осуществлять над труднодоступными территориями (территории промышленных производств, воздушное пространство над хвостохранилищами и отстойниками, пересеченная местность и др.) [1, 2]. В этой связи рассматривается беспилотный программноаппаратный комплекс, как элемент геоинформа-ционной системы, позволяющий осуществлять пробоотбор, а в перспективе анализ воздуха на содержание вредных примесей в атмосфере.
Устанавливают три категории постов наблюдений за загрязнением атмосферы: стационарный, передвижной и маршрутный [3]. В работе рассматривается маршрутный пост, который предназначен для регулярного отбора проб воздуха в фиксированной точке воздушного пространства при наблюдениях с фиксацией геолокационных данных. Маршрутный пост представляет собой беспилотный летательный аппарат (БПЛА), который выступает в качестве передвижного оборудования [5–10].
Конструкция и функциональные возможности
Большое значение для обеспечения повышенных функциональных возможностей, имеют конструкционные особенности используемого пробоотборника, установленного на БПЛА. Существующие аналоги маршрутных постов отличаются большой парусностью проботборных устройств [4], что позволяет использовать их только в безветренную погоду, либо в условиях, близких к идеальным – при слабом стабильном ветре.
Уменьшение массы, парусности конструкции позволяют расширить пространство, потенциально доступное для отбора проб, и использовать БПЛА в погодных условиях, далеких от идеальных. В настоящей работе это достигается благодаря принципиально новому устройству пробоотборника.
Для проведения дистанционного отбора проб воздуха используется специализированный комплекс, состоящий из:
-
• БПЛА;
-
• механизма отбора проб;
-
• системы управления с функцией беспроводной передачи данных, что дает возможность выполнять полет как в автоматическом, так и в ручном режиме.
БПЛА с необходимым оборудованием выполняет полет по заранее заданному маршруту (рис. 1), осуществляет отбор проб в определенных точках (их координаты определяются на стадии обсуждения технического задания и вносятся в программу полета) и доставляет их на базу. Полет маршрутного поста обычно проходит в автоматическом режиме, но при необходимости оператор может перейти на ручное управление и выполнить корректировку маршрута.

Рисунок 1. Маршрут полета и точки отбора проб воздуха
Figure 1. Flight route and air sampling points
Механизмы отбора проб воздуха установлены на раме квадрокоптера, по одному на каждый луч рамы. Для обеспечения полетных функций маршрутного поста и специальных функциональных возможностей – как элемента геоинформационной системы, конструкция включает устройство навигации, полетный контроллер и бесколлекторные электроприводы (рисунок 2).
-GPS closed. закрытый Пробоотборник Sampler open. открытый
Flight
Полетный controller
Servo
Сервопривод '
Бесколлекторный Non-collector двигатель engine
Рисунок 2. Маршрутный пост для мониторинга экологичности воздушного пространства
Figure 2. Route the post to monitor the environmental performance of the airspace
Конструкция пробоотборника представлена на рисунке 3. Шток 1 впаян в две круглые плиты. Верхняя плита 2 выполняет роль заглушки, нижняя 3 осуществляет функции заглушки, ограничителя движения штока и держателя адсорбирующей таблетки 4 .
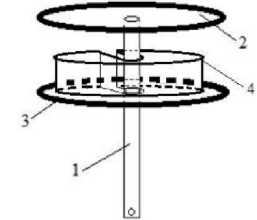
Рисунок 3. Подвижный механизм отбора проб воздуха
Figure 3. The movable selection mechanism of the air samples
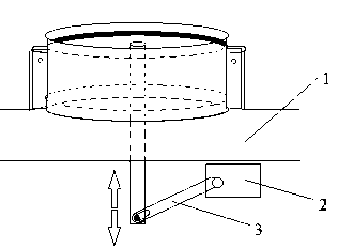
Рисунок 4. Схема механизма пробоотбора воздуха
-
Figure 4. Scheme of the mechanism of air sampling
Рабочий цилиндр (рисунок 4) фиксируется на луче рамы БПЛА 1 , который также является направляющим элементом для штока. Сервопривод 2 связанный со штоком посредством рычага, приводит его в движение, рычаг 3 преобразует вращательное движение сервопривода в возвратно-поступательное. Перемещение штока даёт возможность окружающему атмосферному воздуху 1 (рисунок 5), нагнетаемому винтами квадрокоптера, проникать в рабочий цилиндр, в котором на нижней плите штока располагается адсорбер 2 (адсорбирующая таблетка).
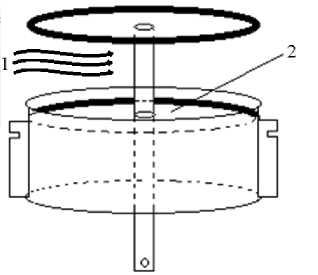
Рисунок 5. Механизм отбора проб в момент пробоотбора
Figure 5. Sampling mechanism at the time of sampling
При завершении сбора проб рабочий цилиндр отсоединяется вместе с конструкцией штока и отправляется в лабораторию.
Описание комплекса программнотехнических средств маршрутного поста
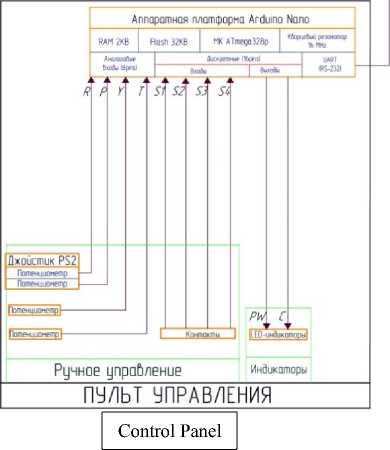
Система управления маршрутным постом сконфигурирована на основе аппаратной платформы семейства микроконтроллеров Arduino. В частности, микроконтроллер UNO R3 предназначен для осуществления полетных функций БПЛА (рисунок 6) и управления системой пробо-отбора в автоматическом и ручном дистанционном режиме. Система управления полетной функцией БПЛА включает набор датчиков, позволяющих производить геолокацию устройства в пространстве. Система обеспечения геолокации включает модуль GPS GY-NЕО6МV2, ультразвуковой дальномер HC-SR04 со встроенным АЦП, барометр GY-68 (со встроенным микроконтроллером ВМР180), модуль гироскопа и акселерометра GY-521 МРU6050, предоставляют возможность задания и контроля маршрута передвижения.
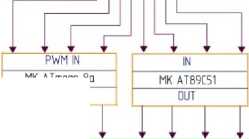
В ручном дистанционном режиме управление сервоприводами осуществляется нажатием на соответствующие кнопки на пульте управления (контакты S1-S4), управляющие сигналы с которых передаются на вход дискретно-цифрового преобразователя микроконтроллера Arduino Nano. Управление полетной функцией в ручном дистанционном режиме осуществляется посредством набора потенциометров, сигналы с которых непосредственно поступают на аналого-цифровые преобразователи контроллера.
Связь между пультом и беспилотным летательным маршрутным постом осуществляют радиомодули HC-12 на основе трансивера SI4463 и микроконтроллера SТМ8. Информация, поступающая на радиомодуль с пульта управления, передается по интерфейсу UART (RS232), далее трансивер SI4463 осуществляет передачу данных по радиоканалу на частоте 433 МНz на радиомодуль объекта управления.
Получив управляющую информацию, микропроцессор микроконтроллера объекта управления обрабатывает полученные данные и подает управляющие воздействия на дискретные выходы микроконтроллера, сигналы с которых поступают на сервоприводы SG-90, оснащенные обратной связью для точной установки углового положения ротора сервопривода и систему управления бесколлекторными электроприводами.

Аппаратная платформа Arduino UNO R3
GPS-нодуль GY-NfO6MV2 МК NE0-6M Е7
Датчик |ZL
Цифровой
?GPCMFrp 3Y-h“
МК ВМР180 U
Датчик ]
Модуль гироскопа и акселерометра GY-521 MPU6O5O МК MPU6050 ] ~
Ритмики 16шт! 1
Цифробой датчик расстояния пХ I"
Датчики
RAM 2КВ | Host! 32КВ | "^
бчй# !6pnsl
АГтеда328р
Оссдрепные ПСрпУ
НК Д[тедп 8а
РИМ OUT
Исполнительные механизмы
Бесколлекторные
Зб игате ли___
А2212 1OOOKV
БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ МАРШРУТНЫЙ ПОСТ
Unmanned aerial Routing Post
Рисунок 6. Коммуникационная схема информационных потоков в системе управления
Figure 6. Communication scheme of information flows in the control system
Заключение
Разработан пилотный образец автоматизированной системы пробоотбора воздуха – составной элемент геоинформационной системы контроля степени и состава загрязнений воздушного пространства. Реализация системы пробоотбора в пилотном образце позволяет увеличить пространство, возможное для отбора проб воздуха, и сделать устройство менее
Список литературы Разработка программно-технического компонента геоинформационной системы для мониторинга экологичности воздушного пространства
- Израэль Ю.А. Экология и контроль состояния природной среды. Л.: Гидрометеоиздат, 1979. 376 с.
- Израэль Ю.А. Глобальная система наблюдений. Прогноз и оценка окружающей природной среды. Основы мониторинга//Метеорология и гидрология. 1974. № 7. С. 3-8.
- ГОСТ 17.2.3.01-86. Охрана природы (ССОП). Атмосфера. Правила контроля качества воздуха населенных пунктов. М.: Стандартинформ, 2005. 4 с.
- Scentroid: Flying laboratory. URL: http://scentroid.com/scentroid-sampling-drone/
- Jamal A.P.D.S.Y. Use of Remote Sensing and Geographic Information System for the Classification of Agricultural Land Uses and Land Cover in the Al-Sad Al-Adhim sub District-Iraq//Alustath Journal. 2018. V. 2. №. 225. P. 245-273.
- Hadjadj K., Djouama A., Ettoumi F.Y. Point-to-point FTTH supervision using geographic information system tool//Modelling, Identification and Control (ICMIC): 8th International Conference on, IEEE, 2016. P. 150-154.
- Марлей В.Е., Плотников С.Н., Резников В.А. Специализированные библиотеки фрагментов алгоритмических сетей для автоматизации разработки алгоритмических моделей.//Вестник ВГУИТ. 2015. № 3. С. 97-102.
- Malekmohammadi B., Blouchi L. R. Ecological risk assessment of wetland ecosystems using multi criteria decision making and geographic information system//Ecological Indicators. 2014. V. 41. P. 133-144.
- Wu H. et al. An innovative approach to managing demolition waste via GIS (geographic information system): a case study in Shenzhen city, China//Journal of Cleaner Production. 2016. V. 112. P. 494-503.
- Mollalo A. et al. Geographic information system based analysis of the spatial and spatio temporal distribution of zoonotic cutaneous leishmaniasis in Golestan Province, north east of Iran//Zoonoses and public health. 2015. V. 62. №. 1. P. 18-28.
