Разработка роботизированного кормораздатчика для обеспечения сбалансированного рациона кормления крупного рогатого скота

Автор: Цыпленков М.В., Довлатов И.М.
Журнал: Агротехника и энергообеспечение @agrotech-orel
Рубрика: Технологии и средства механизации сельского хозяйства
Статья в выпуске: 3 (36), 2022 года.
Бесплатный доступ
Роботизированный кормораздатчик используется на фермах с крупным рогатым скотом. Это автономное устройство, которое автоматически перемещается по ферме и выполняет функцию приема, смешивания корма и автоматическую выдачу дозированной кормовой смеси крупному рогатому скоту. Применение роботизированного кормораздатчика для приготовления качественного и сбалансированного рациона позволит реализовать оптимальный режима кормления, снизит риск заболевания крупного рогатого скота, уменьшит расходы на обслуживающий персонал и облегчит человеческий труд. Целью исследования обзор конструкции и описание функций роботизированного кормораздатчика. В данной работе проведен анализ основных конструктивных элементов современных кормораздатчиков. В процессе анализа было проведено теоретическое исследование и описание основных конструктивных элементов, которые должен иметь роботизированный кормораздатчик. Описывается алгоритм работы роботизированного кормораздатчика. Изображена схема работы роботизированного кормораздатчика, осуществляющего контроль качества приготовленной смеси и раздачу качественной кормовой смеси крупному рогатому скоту, а также детально описан принцип работы процессов кормораздатчика и их взаимодействий.
Роботизированное кормление, роботизированный кормораздатчик, мобильный робот, молочное животноводство, мясное животноводство, содержание животных, сбалансированное питание, оптимальный рацион
Короткий адрес: https://sciup.org/147239796
IDR: 147239796 | УДК: 636.084.74:621.865.8
Development of a robotic feeder to provide a balanced diet for cattle
A robotic feeder is used on farms with cattle. This is an autonomous device that automatically moves around the farm and performs the function of receiving, mixing feed and automatically issuing a dosed feed mixture to cattle. The use of a robotic feeder for the preparation of a high-quality and balanced diet will make it possible to implement the optimal feeding regime, reduce the risk of cattle disease, reduce the cost of maintenance personnel and facilitate human labor. The purpose of the study is to review the design and description of the functions of the robotic feeder. In this study, an analysis of the main structural elements of modern feeders is carried out. During the analysis, a theoretical study was carried out and a description of the main structural elements that a robotic feeder should have. The algorithm of operation of the robotic feeder is described. A diagram of the operation of a robotic feeder is shown, which controls the quality of the prepared mixture and distributes a high-quality feed mixture to cattle, and also describes in detail the principle of operation of the feeder processes and their interactions.
Текст научной статьи Разработка роботизированного кормораздатчика для обеспечения сбалансированного рациона кормления крупного рогатого скота
Введение. На сегодняшний день в молочном животноводстве одной из самых актуальных проблем является обеспечение крупного рогатого скота сбалансированным рационом питания с оптимальными свойствами. При кормлении разных групп крупного рогатого скота (возраст, лактация, порода и т.д.) необходимо соблюдать правильную дозировку питательных веществ, своевременное и сбалансированное кормление дойных коров является важным фактором для производства качественного молока и повышения производительности коров [1]
Процесс кормления молочного стада, является самым трудозатратным процессом на фермах с крупным рогатым скотом
На долю раздачи кормов приходится до 30...40% трудозатрат по уходу за животными. Наиболее перспективной схемой кормления крупного рогатого скота является одновременная, дозированная раздача необходимых питательных кормов и лекарственных добавок в виде сбалансированной кормовой смеси, которую необходимо тщательно перемешать. Это позволит повысить продуктивность на 12...15%, исключить потери и порчу компонентов кормовой смеси [2]. Также обеспечивается стабильное протекание процесса переваривания кормов по всему пищеварительному тракту без колебаний величины кислотности рубца [3]. Результаты исследований свидетельствуют о том, что редкое и обильное кормление, а также неправильно составленный рацион приводят к снижению кислотности рубца, его закислению и сильному ухудшению здоровья, приводя к значительным экономическим убыткам.
Применение роботизированного кормораздатчика позволит снизить расходы на зоотехника и ветеринара, автоматизация кормления позволяет хозяйству на 90% ограничить человеческий труд, снизить затраты обслуживающему персоналу, повышаются надои за счет лучшей поедаемости и усвояемости кормов на 17% [4].
Учитывая вышесказанное, для повышения производительности молочного и мясного стада, повышения качества молока, уменьшения времени на операции приготовления и раздачи корма, а так же снижение затрат на обслуживающий персонал и лечение скота – необходимо разрабатывать роботизированные кормораздатчики, которые будут обеспечивать крупный рогатый скот качественным, сбалансированным рационом и оптимальным режимом питания [5].
Материалы и методы исследования. Материалами для исследований по анализу роботизированного кормораздатчика являются техническая документация по эксплуатации кормораздатчиков, а также исследования и опыт эксплуатации роботизированного кормораздатчика «vector».
Результаты исследования. На сегодняшний день существует много технических устройств, выполняющих функцию автоматической раздачи корма крупному рогатому скоту, некоторые из них изображены на рисунке 1. Было проанализировано множество современных кормораздатчиков, однако для определения основных конструктивных элементов роботизированного кормораздатчика рассмотрим конструкцию двух наиболее популярных ближайших кормораздатчиков [6].
Одним из ближайших аналогов является роботизированный кормораздатчик, разработанный фирмой «LELY». Конструкция роботизированного кормораздатчика «LELY VECTOR» представлена на рисунке 2. Роботизированный кормораздатчик «LELY VECTOR» имеет бункер 1, в который загружают корм и питательные добавки, смешивающий шнек 2, выгрузное окно 3, через которое осуществляется раздача приготовленной кормовой смеси. Бункер 1 находится на мобильной платформе 4, под которой располагаются электропривода с колесами. На мобильной платформе 4 установлена резиновая юбка 5.

Рисунок 1 – Современные миксеры кормораздатчики
Снаружи бункера располагается блок управления 6. Для ориентации по ферме система навигации «LELY VECTOR» использует ультразвуковые и лазерные датчики, которые определяют положение кормораздатчика по металлическим полосам, специально смонтированным в полу фермы.
Рисунок 2 – Конструкция роботизированного кормораздатчика «LELY VECTOR»
Рассмотрим конструкцию самого распространенного раздатчика кормов на территории РФ. СРВ-6В «ХОЗЯИН» — это неавтоматизированный раздатчик прицепного типа, который работает от вала отбора мощности [7]. Кормораздатчик СРК-6В «ХОЗЯИН» с функцией смесителя предназначен для доизмельчения, смешивания и раздачи полнорационной кормовой смеси крупному рогатому скоту в кормушки и на кормовой стол. Конструкция кормораздатчика СРК-6В представлена на рисунке 3.
Рисунок 3 – Конструкция кормораздатчика СРК-6В «ХОЗЯИН»
1 – бункер; 2 – шиберная заслонка ; 3 – гидравлический цилиндр ; 4 – мост; 5 – дышло; 6 – ступенька ; 7 – опорная пятка; 8 – тормоз; 9 – противорез; 10 – устройство для контроля количества загружаемых компонентов; 11 – пневматический тормоз; 12 – привод шнека; 13 – выгрузное окно; 14 – прицепной механизм.
Проанализировав конструкцию аналогов роботизированного кормораздатчика, можно выявить его основные конструктивные элементы. Основными конструктивными элементами роботизированного кормораздатчика являются: мобильная платформа, система хранения смешивания и раздачи кормовой смеси, интеллектуальная система и система питания.
Мобильная платформа используется для перемещения роботизированного кормораздатчика по ферме [8]. Мобильная платформа состоит из металлического корпуса, снизу которого устанавливаются колеса из литой резины вместе с электроприводами, на которых установлена тормозная система.
Система хранения, смешивания и раздачи кормовой смеси, выполняет функцию приема корма с дополнительными лекарственными добавками, функцию приготовления кормовой смеси и дозированную раздачу корма крупному рогатому скоту. Основной элемент системы — это металлический бункер. Бункер — сварная конструкция, состоящая из днища и боковых стенок которая имеет овальную форму в горизонтальной плоскости и коническую в вертикальной плоскости. Внутри бункера устанавливается стальной шнек. Шнек предназначен для измельчения и смешивания кормовых компонентов и подачи их к выгрузному окну. В центр бункера снизу устанавливается привод шнека.
Выгрузное окно имеет шиберную заслонку, которая при помощи электропривода выполняет функцию регулирования выдачи кормовой смеси крупному рогатому скоту. Под бункером стоит взвешивающая система, состоящая из набора тензодатчиков, управляющего контроллера и коммутационных связей.
Интеллектуальная система состоит из системы навигации, системы технического зрения и блока управления [9]. Система навигации состоит из набора лазерных датчиков или ультразвуковых датчиков расстояния, расположенных на корпусе роботизированного кормораздатчика [10]. Интеллектуальная система навигации позволит роботизированному кормораздатчику свободно перемещаться по ферме в отличии от ближайшего аналога, а также избегать препятствия. Внутри блока управления находятся микрокомпьютер и контроллер, которые управляют приводами роботизированного кормораздатчика, датчиками и его работой в целом.
Система питания имеет корпус, в котором находятся несколько аккумуляторов и блок питания. Корпус системы питания имеет разъем для зарядки роботизированного кормораздатчика на зарядной станции.
Разработка алгоритмов работы позволяет описать и структурировать процессы, выполняемые роботизированным кормораздатчиком. Алгоритм работы роботизированного кормораздатчика представлен на рисунке 4.

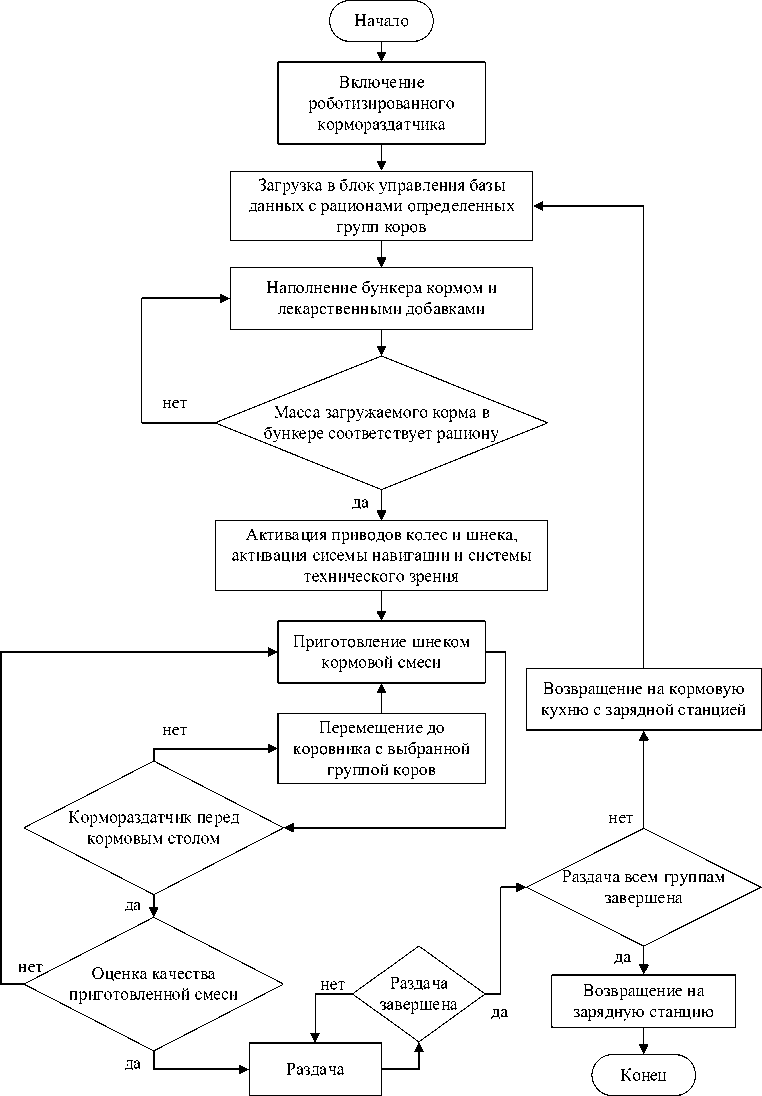
Рисунок 4 – Алгоритм работы роботизированного кормораздатчика
Данный алгоритм отображает технологический процесс работы роботизированного кормораздатчика, выполняющего функции приготовления и раздачи кормовой смеси разным группам крупного рогатого скота. Уникальность алгоритма заключается в контроле качества приготовленной смеси. Роботизированный кормораздатчик начнет раздачу после того, как убедиться, что кормовая смесь в бункере имеет необходимую консистенцию.
Для представления основного принципа работы систем и их взаимодействий, а также описания процессов выполняемых роботизированным кормораздатчиком и функций его основных конструктивных элементов были разработаны две схемы приготовления и раздачи кормовой смеси изображенные на рисунках 5 и 6.
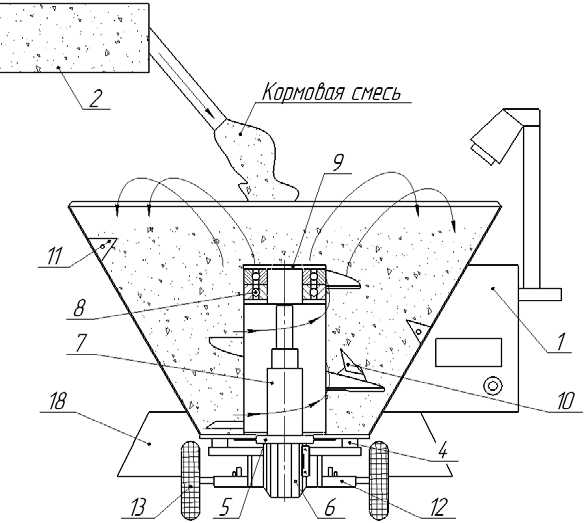
Рисунок 5 – Технологическая схема приготовления корма роботизированным кормораздатчиком
Процесс работы роботизированного кормораздатчика начинается с загрузки в блок управления 1 базы данных с рационами и режимами питания определенных групп коров. Технологическая схема раздачи приготовленной кормовой смеси роботизированным кормораздатчиком представлена на рисунке 6.
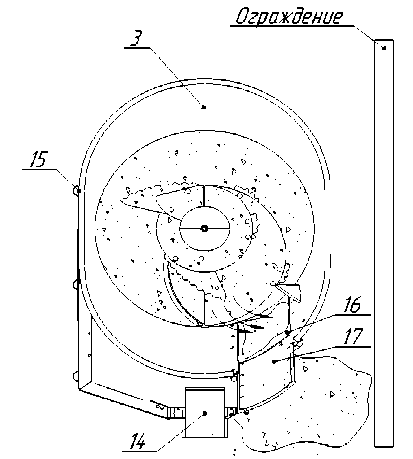
Рисунок 6 – Технологическая схема раздачи приготовленной кормовой смеси
Процесс работы роботизированного кормораздатчика начинается с загрузки в блок управления 1 базы данных с рационами и режимами питания определенных групп коров. База данных загружается из общей базы рационов фермы, составленной зоотехниками. После, в установленное время начинается процесс загрузки кормов из трубопровода 2 (силос, сенаж, стебельчатые корма, концентраты и минералы) и лекарственных добавок в бункер 3 кормораздатчика [11]. Технология кормления состоит из ряда операций: выгрузки сенажа из хранилищ, транспортировки корма к кормораздающим устройствам, дозирования комбикорма, смешивания все компонентов корма и раздачи [12].
Контроль процесса загрузки кормов осуществляется системой взвешивания роботизированного кормораздатчика. Система взвешивания состоит из набора тензодатчиков 4 установленных под дном бункера, управляющего контроллера и коммутационных связей. Взвешивающая система определяет массу загружаемого в бункер корма, после достижения определенного значения массы корма, на кормовую кухню поступает сигнал остановки процесса выгрузки кормов. После окончания процесса загрузки, блок управления отправляет сигнал активации системы навигации и системы технического зрения.
Привод 5 расположен в нижней части бункера и состоит из электродвигателя 6, планетарного редуктора 7 и подшипниковой опоры 8. Привод передает крутящий момент измельчающему шнеку 9. Для резания в разных плоскостях и доизмельчения кормовой массы, по всей длине витка измельчающего шнека установлены ножи 10 серповидной формы с волнистой кромкой лезвий. Загружаемая сверху кормовая масса затягивается перемешивающим шнеком и измельчается с помощью установленных на нем ножей. Кормовая масса приподнимается вертикальным шнеком вверх, а затем свободно сползает вниз по коническим стенка бункера. Зазор между шнеком и стенками бункера обеспечивает качественное приготовления загружаемых кормовых компонентов без повреждения их структуры, слипания или образования комков. В результате выполнения этой технологической операции происходит быстрое перемешивание кормовых составляющих и получается рыхлая однородная кормовая смесь. Для ускорения процесса измельчения, а также предотвращения проворачивания кормовой смеси и наматывания длинноволокнистых кормов на шнек в бункере кормораздатчика устанавливаются два контрножа 11. Контрножи выдвигаются за счет линейных приводов, установленных снаружи бункера.
Параллельно с процессом перемешивания кормовой смеси роботизированный кормораздатчик начинает перемещение. Движение кормораздатчика осуществляется за счет приводов 12, установленных на его колесах 13. Перед началом движения система технического зрения в виде камеры 14, установленной на бункере, считывает начальную метку, из которой получает информацию о своем местоположении и траектории движения до цели(коровника). Также система технического зрения осуществляет контроль за качеством приготовленной смеси. Для получения снимков видеосенсором, во время процесса смешивания останавливается шнек, далее система технического зрения при помощи нейронной сети обрабатывает эти данные и получает информацию о качестве приготовленной смеси. Исходя из полученных результатов регулируется скорость смешивающего шнека или если смесь имеет качественную структуру, то процесс приготовления останавливается. При перемещении до коровника роботизированный кормораздатчик избегает препятствия используя датчики расстояния 15.
Добравшись до точки назначения, роботизированный кормораздатчик используя систему технического зрения должен считать финальную метку и получить информацию о своем местоположении и начале кормового стола. Перед началом раздачи кормораздатчик проверяет качество кормовой смеси в бункере и начинает раздачу только после завершения процесса приготовления. Раздача кормовой смеси осуществляется с помощью шнека, который направляет кормовую массу в сторону выгрузного окна 16. Дозирование кормовой смеси регулируется за счет положения шиберной заслонки 17, скорости вращения шнека и скорости движения кормораздатчика, для регулирования этих параметров в блок управления поступает информация полученная от тензодатчиков, о количестве выданной смеси. После раздачи кормовой смеси всем группам коров, кормораздатчик может выполнять функцию подвигания корма благодаря обтекаемой форме корпуса 18. Во время работы роботизированный кормораздатчик контролирует уровень заряда аккумулятора и при необходимости возвращается на зарядную станцию для заярядки.
Заключение. Процесс кормления занимает 36% затрат времени и физического труда, являясь одним из самых трудоёмких и время затратных процессов на молочной ферме. Автоматизация процесса кормления при использовании роботизированного кормораздатчика повысит продуктивность молочного стада на 20%, улучшит качество молочной и мясной продукции более чем на 10%, уменьшит время приготовления до 30% и повысит качество кормовой смеси. Применение роботизированного кормораздатчика для приготовления качественного и сбалансированного рациона позволит реализовать оптимальный режима кормления, снизит риск заболевания крупного рогатого скота, уменьшит расходы на обслуживающий персонал и облегчит человеческий труд.
Проведено исследование основных конструктивных элементов роботизированного кормораздатчика. Рассмотрев конструкции более 6 аналогов, были выбраны два ближайших аналога роботизированного кормораздатчика, а именно «LELY VECTOR» и «СРВ-6В ХОЗЯИН». Анализ конструкции двух ближайших аналогов позволил выявить основные конструктивные элементы, которые должен иметь роботизированный кормораздатчик это: система хранения смешивания и раздачи кормовой смеси, интеллектуальная система, которая состоит из системы навигации, системы технического зрения и блока управления, а также система питания.
Разработанный алгоритм позволяет описать и структурировать технологические процессы работы роботизированного кормораздатчика, выполняющего функции приготовления и раздачи кормовой смеси разным группам крупного рогатого скота.
Разработана схема работы роботизированного кормораздатчика, дающая представление об основном принципе работы систем и их взаимодействий. Описано более 15 процессов выполняемые роботизированным кормораздатчиком от начала загрузки кормовой смеси в бункер до раздачи приготовленной кормовой смеси крупному рогатому скоту.
Список литературы Разработка роботизированного кормораздатчика для обеспечения сбалансированного рациона кормления крупного рогатого скота
- АГРОВЕСТНИК Полноценное кормление молочного скота – основа реализации генетического потенциала продуктивности. URL:–https://agrovesti.net/lib/tech/feedingtech/polnotsennoe-kormlenie-molochnogo-skota-osnova-realizatsii-geneticheskogo-potentsialaproduktivnost.html (дата последнего обращения 14.06.2022).
- Мороз, М.Т. Оптимизация кормления — основной фактор повышения продуктивности и продолжительности жизни животных. / М.Т. Мороз // Зоотехния. 2008. - №10.- С. 25-26.
- Максимюк, Н.Н. Физиология кормления животных: Теории питания, прием корма, особенности пищеварения / Н.Н. Максимюк, В.Г. Скопичев. – СПб.: Лань, 2004. – 256с.
- Дорохов А.С., Никитин Е.А., Павкин Д.Ю. Колесные роботизированные технические средства: опыт и перспективы использования на животноводческих комплексах // Техника и оборудование для села. 2022. № 4 (298). С. 16-21.
- Никитин Е.А. Система роботизированного обслуживания кормового стола на животноводческих комплексах // Техника и оборудование для села. 2020. № 6 (276). С. 26-30.
- Брагин А.Ю. Мобильные кормороздатчики на молочных фермах // ЗНАНИЯ МОЛОДЫХ – БУДУЩЕЕ РОССИИ Материалы XVIII Международной студенческой научной конференции: Сборник научных трудов. Киров, 2020. С. 164-167.
- Кузин Д.В., Королев В.А. Автоматизированный кормораздающий транспорт для фермерских хозяйств // Инновации в сельском хозяйстве. 2015. № 1 (11). С. 53-57.
- Рудзик Э.С., Довлатов И.М., Павкин Д.Ю. Автоматизация сельскохозяйственных помещений // Инновации в сельском хозяйстве. 2018. № 1 (26). С. 51-57.
- Кирсанов В.В., Павкин Д.Ю., Никитин Е.А., Кирюшин Е.А. Применение систем технического зрения для диагностики качества кормов КРС // АГРАРНАЯ НАУКА ЕВРО-СЕВЕРО-ВОСТОКА. 2021. № 5. С. 770-776.
- Кирсанов В.В. Павкин Д.Ю., Никитин Е.А., Довлатов И.М. Методика оптимизации параметров машинного кормления крупного рогатого скота // Агроинженерия. 2021. Т. 1. № 1. С. 10-14.
- Купреенко А.И., Исаев Х.М., Михайличенко С.М. Применение информационных технологий в современном сельском хозяйстве // Новые информационные технологии в образовании и аграрном секторе экономики: сб. материалов I междунар. науч.-практ. конф. Брянск, 2018. С. 11-16.
- Grothmann A., Nydegger F., Häußermann A., Hartung E. Automatic Feeding System (AFS) - Potential for Optimisation in Dairy Farming. Landtechnik. 2010. N 2 (65). p. 129-131.
