Разработка систем планирования пути, облёта препятствий и распознавания лиц для беспилотного летательного аппарата

Автор: Ганеева А.И.
Журнал: Международный журнал гуманитарных и естественных наук @intjournal
Рубрика: Технические науки
Статья в выпуске: 6-1 (93), 2024 года.
Бесплатный доступ
В статье рассматриваются алгоритмы, разработанные для беспилотного летательного аппарата, такие как системы планирования пути, облёт препятствий и распознавание лиц. Данные алгоритмы позволяют расширить функционал использования беспилотного летательного аппарата в гражданских целях для таких задач, как аэрофотосъёмка, доставка товаров, спасение людей, инспекция инфраструктуры и 3D-картографирование. Алгоритмы, использующиеся в беспилотном летательном аппарате, разработаны с использованием микрокомпьютера Raspberry Pi, приложения для записи образов на съёмные носители BalenaEtcher и языка программирования Python.
Беспилотный летательный аппарат, алгоритм
Короткий адрес: https://sciup.org/170205379
IDR: 170205379 | DOI: 10.24412/2500-1000-2024-6-1-202-204
Development of path planning, obstacle avoidance and face recognition systems for an unmanned aircraft
This article discusses algorithms developed for unmanned aerial vehicle, such as path planning systems, obstacle avoidance and face recognition. These algorithms allow the unmanned aerial vehicle to be used for civilian applications for tasks such as aerial photography, goods delivery, human rescue, infrastructure inspection and 3D mapping. The algorithms used in the unmanned aerial vehicle were developed using a Raspberry Pi microcomputer, BalenaEtcher image recording application and Python programming language.
Текст научной статьи Разработка систем планирования пути, облёта препятствий и распознавания лиц для беспилотного летательного аппарата
Алгоритмы планирования пути, облёта препятствий и распознавания лиц включены в программное обеспечение беспилотного летательного аппарата [1].
Основа алгоритмов беспилотного летательного аппарата, это программа Bale-naEtcher по записи образов для съёмных носителей, которые в последствии будут использоваться для микрокомпьютера Raspberry Pi [2, 3].
Данный микрокомпьютер является основой беспилотного летательного аппарата, к которому также подключена камера. С помощью языка программирования Python написаны алгоритмы системы планирования пути, облёта препятствий и распознавания лиц [4].
Программное обеспечение, включающая в себя алгоритмы для беспилотного летательного аппарата, обладает следующими возможностями:
-
- планирование маршрута: система беспилотного летающего аппарата обладает возможностью автоматического определения наилучшего маршрута, учитывая географические особенности местности, закрытые и запретные зоны, дополнительно учитывая погодные условия, высоту, на котором должен работать беспилотный летательный аппарат и прочие факторы, необходимые для корректного планирования маршрута;
-
- облёт препятствий: беспилотный летательный аппарат способен преодолевать препятствия с помощью алгоритма облёта препятствий, работающего в режиме реального времени, который анализирует информацию, получаемую с камер беспилотного летательного аппарата;
-
- распознавание лиц: система беспилотного летательного аппарата использует алгоритмы распознавания лица, работающие на основе алгоритмов машинного зрения и обучения модели машинного обучения на основе набора данных фотографий, которые в последствии будут использованы для анализа людей или объектов, распознанные беспилотным летательным аппаратом;
-
- интеграция навесного оборудования: беспилотный летательный аппарат обладает возможностью поддержки камер, датчиков, и прочего оборудования, которое может использоваться в программном обеспечении беспилотного летательного аппарата для различных задач и целей;
-
- создание отчётов: беспилотный летательный аппарат обладает не только возможностью сохранения промежуточных результатов, но и создавать отчётность о том, какие задачи выполнены, а какие задачи находятся на каком этапе процесса выполнения, а также, при необходимости, в программное обеспечение можно вклю-
- чать и дополнительные пункты для отчётности от беспилотного летательного аппа
рата.
Для визуализации алгоритма работы с беспилотным летательным аппаратом, визуализируем данный процесс при помощи нотации BPMN (рис. 1).
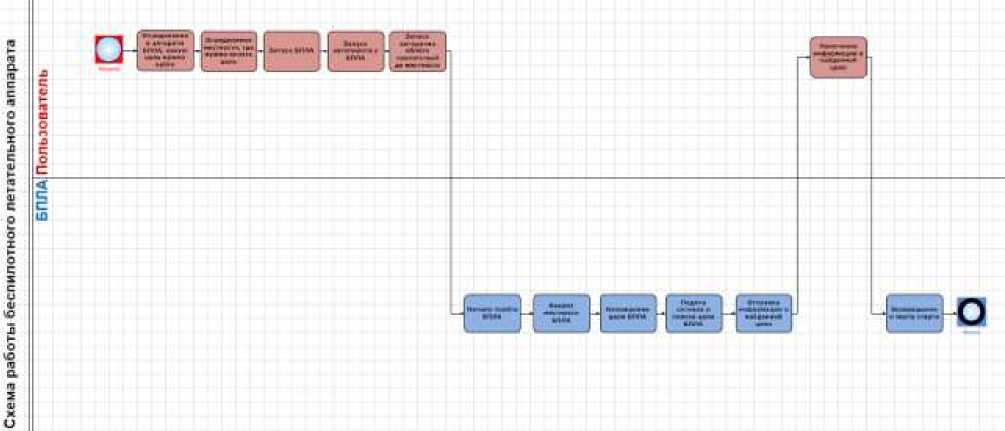
Рис. 1. Алгоритм работы с беспилотным летательным аппаратом
Таким образом, работа с беспилотным летательным аппаратом включает в себя следующие этапы:
-
- определение в алгоритм беспилотного летательного аппарата, какую цель нужно найти;
-
- определение местности, где нужно искать цель;
-
- запуск беспилотного летательного аппарата;
-
- запуск автопилота у беспилотного летательного аппарата;
-
- запуск алгоритма облёта препятствий до местности;
-
- начало полёта беспилотного летательного аппарата;
-
- анализ местности беспилотного летательного аппарата;
-
- нахождение цели беспилотного летательного аппарата;
-
- подача сигнала о поиске цели беспилотного летательного аппарата;
-
- отправка информации о найденной цели;
-
- возвращение беспилотного летательного аппарата к месту старта.
Система планирования пути работает таким образом, что беспилотный летательный аппарат при помощи датчиков и камер собирает информацию о своём место- положении, высоте, окружающей среде, препятствиях, после чего алгоритмы на основе машинного обеспечения позволяют оценить потенциальные препятствия и найти оптимальные маршруты при помощи А* поиска, во время поиска пути также учитывается и расстояние до ближайшего препятствия, скорость, с которым летит беспилотный летательный аппарат, а также ограничения, вложенные в архитектуру беспилотного летательного аппарата. С помощью контроллеров, имеющиеся у беспилотного летательного аппарата, происходит смена траектории пути, которые определили алгоритмы планирования пути.
Алгоритм облёта препятствий работает таким образом, что беспилотный летательный аппарат, при помощи датчиков, получает информацию об окружающей обстановке в режиме реального времени, после чего, полученные данные обрабатываются с помощью машинного зрения и фильтров препятствий, заложенные в алгоритмы беспилотного летательного аппарата, далее, происходит облёт препятствий.
Распознавание лица работает таким образом, что создаётся набор данных для фотографий, в котором определяется объект или лицо, которое должен в последствии обнаруживать беспилотный летательный аппарат. После того, как набор фотографий сделан, модель машинного обучения должна обучиться на обучающем наборе данных, для этого, делается порядка 10 фотографий объекта или лица с разного ракурса при помощи машинного зрения, после чего, модель машинного обучения тренируется, после чего, можно использовать беспилотный летательный аппарат для выполнения поставленных задач распознавания лица или объекта.
Список литературы Разработка систем планирования пути, облёта препятствий и распознавания лиц для беспилотного летательного аппарата
- Об истории беспилотных летательных аппаратов и перспективах их использования в практике спасательных работ. - [Электронный ресурс]. - Режим доступа: https://russiandrone.ru/publications/ob-istorii-bespilotnykh-letatelnykh-apparatov-i-perspektivakh-ikh-ispolzovaniya-v-praktike-spasateln/(дата обращения: 22.06.2024).
- Etcher: преимущества приложения. - [Электронный ресурс]. - Режим доступа: https://etcher-balena.com/(дата обращения: 24.06.2024).
- Raspberry Pi. - [Электронный ресурс]. - Режим доступа: https://ru.wikipedia.org/wiki/Raspberry_Pi (дата обращения: 26.06.2024).
- Язык Python - описание, синтаксис, плюсы и минусы. - [Электронный ресурс]. - Режим доступа: https://pythonchik.ru/osnovy/yazyk-python-opisanie-sintaksis-plyusy-i-minusy?ysclid=lgaisr8n50106742327 (дата обращения 27.06.2024).
