Разработка системы автоматизации экспериментальных исследований

Автор: Снежко В.Л., Палиивец М.С., Подобный А.В.
Журнал: Международный журнал гуманитарных и естественных наук @intjournal
Рубрика: Технические науки
Статья в выпуске: 10-2 (73), 2022 года.
Бесплатный доступ
В статье рассматриваются процесс разработки системы автоматизации экспериментальных исследований на примере машины постоянного тока - универсального коллекторного двигателя. Разработана структура автоматизированной системы научных исследований (АСНИ), и более детально рассмотрены способы реализации отдельных компонентов. Также разработана модульная структура стенда, и способы связи его составных компонентов. Практически реализован испытательный стенд.
Автоматизация, научные исследования, универсальный коллекторный двигатель, модульные системы, 3d-моделирование
Короткий адрес: https://sciup.org/170196538
IDR: 170196538 | DOI: 10.24412/2500-1000-2022-10-2-118-120
Problems of automation of experimental research
The article discusses the process of developing an automation system for experimental research on the example of a DC machine - a universal collector motor. The structure of the automated system of scientific research (ASRS) has been developed, and the methods for implementing individual components have been considered in more detail. A modular structure of the stand has also been developed, as well as methods for connecting its constituent components. Practically implemented test bench
Текст научной статьи Разработка системы автоматизации экспериментальных исследований
Для проведения экспериментальных исследований разработаем автоматизированную систему, которая будет состоять из двух основных подсистем:
-
1. Лабораторная установка;
-
2. Автоматизированное рабочее место (APM) исследователя.
Лабораторная установка – это объект, над которым требуется установить телемеханический контроль и управление. В данном случае это лабораторный стенд с установленным на него универсальным коллекторным двигателем (УКД). Этот узел будет являться источником всей получаемой телемеханической информации.
APM – автоматизированное рабочее место, позволяющее исследователю использовать функции автоматизирования. APM является пунктом управления. APM базируется на ЭВМ, представляя из себя независимый программно-технический комплекс, позволяющий в диалоговом режиме обрабатывать получаемую с объекта информацию, передавая в устройства вывода в наиболее удобном для пользователя виде (графическом, табличном, и т.д.)
Подсистемы САИ взаимодействуют друг с другом по проводным каналам связи.
Лабораторная установка представляет собой лабораторный стенд с установленным на него УКД, чья модель была спроектирована в трехмерном виде, программном комплексе САПР – SolidWorks [1], (рис. 1).
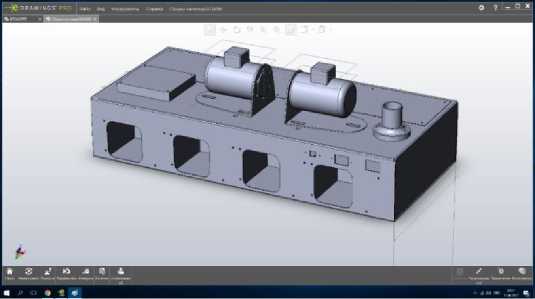
Рис. 1. Модель лабораторного стенда в SolidWorks
Чтобы осуществлять необходимый контроль, телеметрию и управление, необходимо использовать различные датчики, и источники энергии [2]. Оптимальным решением будет закрепление за каждым таким объектом своего, индивидуальное микроконтроллерного устройство, которое называется Slave [3].
К Slave могут подключаться датчики для измерения токов, напряжений, температуры и др. Также на его цифровые входы заводятся положения состояний различных реле. К нему могут подключаться источники тока и напряжений, характеристиками которых необходимо управлять дистанционно [4]. В задачи Slave входит опрос всех подключенных к нему датчиков и сохранение этой информации у себя в памяти. Каждое новое показание каждого датчика записывается в память микроконтроллера с привязкой по времени специальной меткой. Каждый Slave имеет набор команд, при получении которых он обязан выполнить определенное действие (выставить необходимый уровень тока или напряжения), поэтому это подчиненный (ведомый) микроконтроллер.
Главным управляющим центром лабораторного стенда является микроконтроллерное устройство под названием Master. Данный микроконтроллер является управ- ляющим. Он отвечает за опрос каждого из Slave. Именно на Master приходят управляющие команды из APMа. Master формирует весь информационный поток для отправки в ПУ APMа. В задачи Master также входит синхронизация по времени всех “подчиненных”.
На лабораторном стенде существует своя локальная сеть. Сеть должна обеспечивать хорошую помехоустойчивость, высокую скорость передачи данных и, по возможности, максимальную простоту исполнения. В рамках этой сети необходима организация связи между узлами Master и Slave для обеспечения функционирования лабораторного стенда. Для этого нужно выбрать интерфейс связи и протокол передачи данных. В качестве интерфейса связи был выбран RS-485 – стандарт физического уровня для асинхронного интерфейса. А в качестве протокола связи – Modbus RTU, основанный на клиент-серверной архитектуре. Этот протокол был создан фирмой Modicon, для работы с микропроцессорными устройствами, и на данный момент, благодаря своим качествам, широко используется в промышленности для организации связи электронного оборудования [5]. Макет лабораторного стенда на стадии разработки показан на рис. 2.
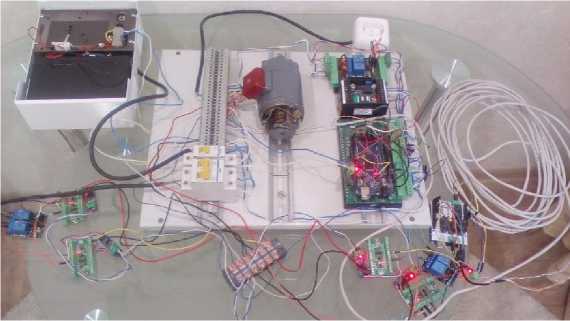
Рис. 2. Испытательный стенд
Интерфейс RS-485 – наиболее распространенный промышленный стандарт. Он использует двунаправленный сбалансированный канал передачи. Интерфейс позволяет многоузловые соединения, позволяя создавать системы с количеством элемен- тов до 32 с удаленностью до 1200 м. Если использовать повторители, то можно повысить дальность передачи на дополнительные 1200 м или использовать дополнительные 32 элемента. При помощи данного интерфейса достигается транслиро- вание данных со скоростью до 10 Мбит/с, при этом предельно возможная дальность будет непосредственно зависеть от того, с какой скоростью транслируется информация. Стандарт RS-485 может поддерживать полудуплексную связь, которая позволяет передачу и прием информации по одной витой паре проводников с разделением по
Связь в системе организована по технологии Master-Slave (главный-подчиненный), где Master может начать передачу (сделать запрос), а устройства Slave отправляют запрашиваемые данные или производят предписанные действия. Slave может отправлять сообщение только ответ на запрос, направленный именно времени. ему.
Список литературы Разработка системы автоматизации экспериментальных исследований
- Алямовский, А.А. SolidWorks 2007/2008. Компьютерное моделирование в современной инженерной практике. - СПб, 2008.
- Ильин, В.А. Телеуправление и телеизмерение. - М.: Энергоиздат, 1992. - 560 с.
- Кондратьева О.В. Применение возможностей нечетких множеств для решения задач прогнозирования и оптимизации / О.В. Кондратьева, М.В. Петухова, Е.В. Щедрина // Международный журнал гуманитарных и естественных наук. - 2022. - № 3-3 (66). - С. 169-172.
- Хаханина Т.И., Инверсионно-вольтамперометрический аналитический контроль наносодержаний ртути в системах городского водоснабжения / Т.И. Хаханина, И.Н. Петухов, Н.Ю. Кузьмичев, О.В. Кольцова // Природообустройство. - 2013. - № 4. - С. 27-32.
- Gerin M. Руководство по организации сети Modbus. Выпуск № 8. - Schneider Electric, 2007. - 95 c.
- Митюшкин, К.Г. Телеконтроль и телеуправление в энергосистемах. - М.: Энергоатомиздат, 1990. - 314 с.
