Разработка системы раннего обнаружения лесных пожаров с использованием беспилотных летательных аппаратов и искусственного интеллекта

Автор: Вычерова Наталия Романовна, Будевич Евгений Артурович, Беляев Андрей Эдуардович
Журнал: Resources and Technology @rt-petrsu
Рубрика: Полная статья
Статья в выпуске: 4 т.19, 2022 года.
Бесплатный доступ
Для большинства стран мира лесные пожары продолжают оставаться серьёзной проблемой. В настоящее время существует множество способов борьбы с ними. В основном направлены они все на снижение ущерба, причинённого пожарами, с использованием методов их раннего обнаружения. По подсчетам Рослесхоза, в среднем размер ущерба от лесных пожаров в год составляет порядка 20 млрд рублей, из них от 3 до 7 млрд - ущерб лесному хозяйству (потери древесины). В статье рассматривается использование беспилотных летательных аппаратов (БПЛА) для регулярного патрулирования потенциально опасных зон распространения огня с использованием преимуществ искусственного интеллекта (ИИ) и возможностью самостоятель-ной обработки полученной информации. Это позволяет БПЛА использовать методы компьютерного видения для обнаружения дыма или огня, на основе информации, получаемой от их видеокамер
Дрон, компьютерное видение, распознавание образов методом опорных векторов (support vector machines
Короткий адрес: https://sciup.org/147240136
IDR: 147240136 | УДК: 681.5 | DOI: 10.15393/j2.art.2022.6523
Development of a forest early detection system fires using unmanned aerial vehicles and artificial intelligence
For most of the world, wildfires continue to bea serious problem. There are now many ways to deal with them, and they are all mainly aimed at reducing the damage caused by fires using early detec-tion methods. According to the estimates of the Federal Forestry Agency, on average, the amount of damage from forest fires per year is about 20 billion rubles, of which from 3 to 7 billion is damage to forestry (wood loss). The article discusses the use of unmanned aerial vehicles (UAVs) for regular pa-trolling of potentially dangerous areas of fire distribution, using the advantages of artificial intelligence (AI) and the ability to self-process the information received. This allows UAVs to use computer vision techniques to detect smoke or fire, based on information received from their video cameras
Текст научной статьи Разработка системы раннего обнаружения лесных пожаров с использованием беспилотных летательных аппаратов и искусственного интеллекта
-
1. Введение
Только в Российской Федерации лесами покрыто почти две трети территории, что на 2021 г. составляет 1,019 млрд га. Из них ежегодно пожарами охвачено от 500 тыс. до 3,5 млн га. С 2019 г. ежегодно высаживается около 1 млн га саженцев за счёт реализации федерального проекта «Сохранение лесов». При этом в Российской Федерации в год регистрируется от 9 до 35 тыс. лесных пожаров, охватывающих площади от 500 тыс. до нескольких миллионов гектаров [8].
-
2. Методы и принципы исследования
-
2.1. Основы системы для раннего обнаружения лесного пожара
-
Количество лесных пожаров за последние десятилетия в мире несколько снизилось, что объясняется ужесточением предпринимаемых мер и внедрением методов их раннего обнаружения. Однако лесные пожары продолжают наносить колоссальный ущерб во всём мире.
Наиболее значимым фактором в борьбе с лесными пожарами является максимально раннее обнаружение признаков огня и быстрота реагирования противопожарных служб. Для раннего обнаружения лесных пожаров предлагается использовать современные технологии: использование двух типов беспилотных летательных аппаратов (БПЛА) — дронов с неподвижным крылом («самолётного» типа) и мультироторных дронов (мультикоптеров).
В основе любого прогноза лежит непрерывное наблюдение за множеством специфических параметров. Наша задача состоит в сокращении количества наблюдаемых параметров, включая зависящие от погодных условий, что позволит уменьшить ошибки. В то же время отобранные параметры должны с высокой точностью коррелироваться с риском возникновения пожара. Для этого целесообразно использовать следующие параметры:
-
■ минимальная суточная температура Тмин;
-
■ максимальная суточная температура Тмакс;
-
■ среднесуточная влажность;
-
■ суточная солнечная радиация;
-
■ среднесуточная скорость ветра;
-
■ суммарное количество осадков.
-
3. Результаты
Указанные параметры используются для прогноза пожароопасности методом опорных векторов ( SVM — Support Vector Machines).
Метод опорных векторов заключается в нахождении точек данных разных классов и рисовании границы между ними. Такие выбранные точки данных называются опорными векторами, а границы — гиперплоскостями. Алгоритмы используют набор математических функций — ядра. Функция ядра состоит в том, чтобы принимать данные в качестве входных и преобразовывать их в требуемую форму. При этом рассматривается каждая пара точек данных до тех пор, пока не найдётся ближайшая пара из разных классов и будет проведена прямая линия (или плоскость) на полпути между ними. Если входные данные линейно разделимы, то решение для гиперплоскости является простым. Но на практике часто области классификации пересекаются, и ни одна прямая плоскость не может выступать в качестве границы. Когда данные линейно неразделимы, методом опорных векторов отображают данные в пространстве более высокой размерности (N-мерного) — пространстве признаков. Эта задача может быть решена с использованием различных нелинейных отображений: полиномиальных, сигмовидных и радиальной базисной функции Гаусса.
После нелинейного преобразования находят линейную разделяющую гиперплоскость в этом новом пространстве признаков. В отличие от других методов модель вероятности и функции плотности вероятности не должны быть заранее известны [20].
Во время стадии изучения методом опорных векторов используют данные обучения для поиска параметров w = [ w 1 w 1 ... W n ] T и b функции решения d ( x , w, b ) представляется:
n d (x, w, b) = wTx + b =
^ wx + b .
i=i
Разделяющая гиперплоскость описывается уравнением d ( x, w , b ) = 0. На этапе тестирования невидимый вектор x создаст выход у в соответствии со следующей индикаторной функцией:
у = sign (d(x, w, b)).
Иными словами, если d ( x,w,b ) > 0, то x принадлежит классу 1, и если d ( x,w, b ) < 0, то x принадлежит классу 2.
Весовой вектор и смещение получаются путём минимизации следующего уравнения:
Ld (a) = 0,SaTHa-fTa (3)
при условиях:
-
ута = 0;
-
а > 0;
где H = y i y j (x i x j ) — матрица Гессе; f — единичный вектор f = [1, 1...1] T .
При наличии значения a oi решение задачи двойственной оптимизации будет достаточно для определения весового вектора и смещения с использованием следующих уравнений:
I
w
^ « oi V i X i=i
b = ^Лу-^А
где N — количество опорных векторов.
Представленный выше линейный классификатор имеет ограничения, поскольку он применим только с линейно зависимыми данными, тогда как на практике часто данные случайны и зависимость у них нелинейная. Нелинейные данные должны быть отображены на новом функциональном пространстве более высокой размерности с использованием подходящей отображающей функция Ф( x ), значительно большей размерности, потенциально бесконечной. Упрощает задачу то, что во всех уравнениях функция представлена только в виде скалярного произведения.
Согласно теории Гильбертова пространства с воспроизводящим ядром [2], которая выходит за рамки настоящей статьи, функция ядра определяется как
K(xt, Xj) = ФО^ )ТФ(хД
Уравнение (3) имеет следующий вид в пространстве признаков:
i
Ld(a) = ^«i- 2 ^ yiyj«i«jK(xi, Xj)(7)
i=i i ,j=i при условии
-
a > 0;
i
-
^ «iVi = 0.
-
3.1. Техническая составляющая системы
i=i
Гиперповерхность в уравнении (1) задаётся в виде нелинейного пространства следующим уравнением:
d(x) = Zi=iyi«iK(Xi, х).
Решение уравнения (7) даёт классификатор с жёсткими границами. В общем, полезно использовать классификатор мягких полей, чтобы сохранить гладкость гиперплоскости и предотвратить стремление « i к бесконечности. Данный классификатор получается с использованием того же процесса минимизации, просто путём добавления ещё одного ограничения к уравнению (7). Ограничение 0 < « i < С, где C определяется пользователем.
Если C стремится к бесконечности, классификатор мягких границ стремится к жёстким границам [1], [5], [7], [18—22].
Системы обнаружения лесного пожара можно реализовать с помощью специализированных камер, способных фиксировать изображение в различных диапазонах спектра шкалы электромагнитных излучений. Самая сложная задача в этом случае — определение места установки видеокамер для лучшего обзора наблюдаемой территории. Поскольку у данных систем есть определённые ограничения из-за статичного положения видеокамер, то в последние годы широкое применение находит использование БПЛА. В предлагаемой системе раннего обнаружения признаков лесных пожаров предусмотрено использование специализированных видеокамер и/или тепловизоров. Кроме этого, БПЛА имеют постоянную двухстороннюю связь с базовой станцией (рисунок 1).

Рисунок 1. Состав системы раннего обнаружения лесных пожаров
-
Figure 1. Composition of the forest fire early detection system
Многие десятилетия БПЛА широко использовались в различных областях (Вооружённых силах, сельском хозяйстве и многих других). В предлагаемой системе раннего обнаружения лесных пожаров предлагается использовать БПЛА двух типов — с неподвижным крылом и мультироторные. БПЛА с неподвижным крылом отличаются рядом преимуществ от дронов других классов, таких как повышенная крейсерская скорость и надёжность, достижение большей высоты полёта и больший обзор наблюдаемой территории. В то же время мультироторные БПЛА способны взлетать и приземляться вертикально при любом типе ландшафта и более экономичны. В настоящее время развиваются также гибридные БПЛА, которые объединяют преимущества обоих [1], [3], [20].
Как видно из блок-схемы, представленной на рисунке 2, система выявляет пожар в три этапа.
Первый этап (выделен синим цветом) осуществляет БПЛА с неподвижным крылом, который для более широкого обзора пролетает на высоте от 350 до 5000 м. При обнаружении подозрения на лесной пожар к выполнению второго этапа приступает получивший сигнал тревоги и координаты района от БПЛА с неподвижным крылом БПЛА мультироторного типа (выделено зелёным цветом), который осматривает подозрительный район с более низкой высоты для подтверждения наличия лесного пожара. Если наличие пожара не подтверждается, то мультироторный БПЛА возвращается на базу. В противном же случае мультироторный БПЛА передаёт сигнал тревоги наземной противопожарной службе (выделено оранжевым цветом), которой продолжает помогать контролировать выявленную область. Таким образом, второй БПЛА позволяет сократить количество ложных определений лесных пожаров, поскольку мультироторные дроны способны летать на более низкой высоте (до 350 м) по сравнению с дронами с неподвижным крылом, что обеспечивает наилучший обзор.
Также оба БПЛА снабжаются специализированными многоспектральными камерами, которые позволяют выполнять полный анализ района, где подозревается пожар. Изображения, захваченные многоспектральными камерами, могут обрабатываться и использоваться для создания нормализованного относительного индекса растительности (NDVI — Normalized Difference Vegetation Index) карты ландшафта. NDVI — простой графический индикатор, который может использоваться для оценок ущерба от пожара [6], [9], [20].
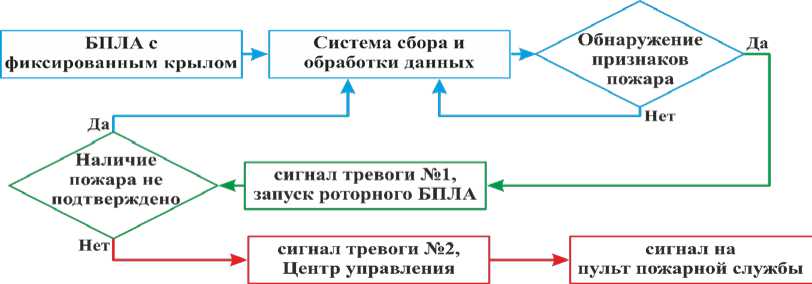
Рисунок 2. Блок-схема операционного принципа ранней платформы обнаружения лесных пожаров
-
Figure 2. Flowchart of the operational principle of the early forest fire detection platform
-
3.2. Реализация системы искусственного интеллекта
Система взаимодействия БПЛА полностью автоматизирована. Для совершенствования указанной системы предлагается задействовать искусственный интеллект, позволяющий БПЛА прогнозировать лесные пожары с использованием нейронных сетей. В настоящее время нейронные сети является достаточно востребованным видом в вычислительных системах из-за их способности «обучаться» выполнить задачи на основе примеров. Нейронные сети вдохновлены биологическими нейронными связями в человеческом мозге.
После проведения анализа рынка БПЛА было решено использовать модель «GAMMA» с неподвижным крылом (рисунок 3), российский многоцелевой беспилотный летательный аппарат, спроектированный компанией «Автономные аэрокосмические системы — Геосервис». Максимальная скорость данного БПЛА составляет 140 км/ч, эффективная дальность полёта составляет 50 км, а максимальная продолжительность нахождения в воздухе — 12 ч, что, в свою очередь, вполне удовлетворяет нашим целям и задачам. Из-за большой высоты полёта БПЛА с неподвижным крылом значительным становится и расстояние камер до земной поверхности, что может при попытках определить наличие лесного пожара приводить к большому количеству ложных тревог. Второй, но уже мультироторный БПЛА необходим для тщательного изучения подозрительного района и сведения к минимуму ложных тревог. Мультироторный БПЛА снабжается более качественной видеокамерой и летит на более низкой высоте для достижения лучшей видимости. Выбор остановили на влагозащищённом БПЛА DJI Matrice 210 (рисунок 4), способном летать в дождь или туман.
Искусственный интеллект стал чрезвычайно популярен в последние годы, поскольку он способен выполнять задачи, присущие человеческому разуму. Искусственный интеллект (машинный интеллект) реализуется с помощью нейронных сетей.
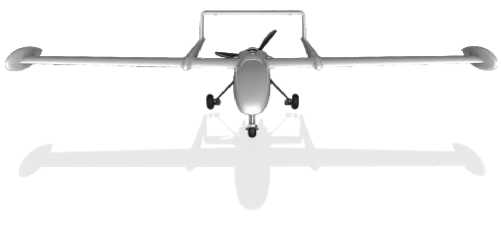
Рисунок 3. БПЛА «GAMMA»

Рисунок 4. DJI Matrice 210
Figure 3. UAV «GAMMA»
Figure 4. DJI Matrice 210
Нейронные сети — это специализированные компьютерные модели, которые можно обучить выполнению различных задач. Они используются для классификации изображений, распознавания речи, перевода текстов и более сложных задач, таких как управление автономными транспортными средствами и т. д. Существует несколько типов нейронных сетей, но наиболее широко используемыми для обнаружения изображений и компьютерного видения являются свёрточные нейронные сети [2], [4], [20]. Они состоят из входного слоя, скрытых слоёв и выходного слоя взаимосвязанных нейронов. В зависимости от количества скрытых слоёв применяются методы машинного обучения (только с одним скрытым слоем) и методы глубокого обучения (с более чем одним скрытым слоем). Например, на рисунке 5 представлена глубокая нейронная сеть, поскольку она имеет два скрытых слоя.
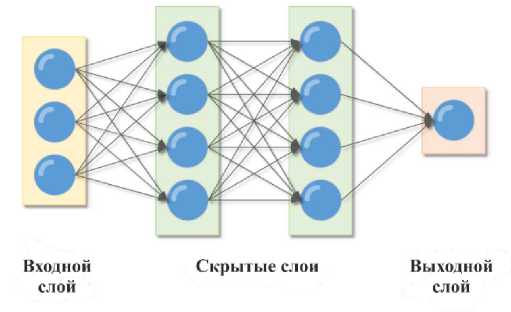
Рисунок 5. Пример нейронной сети глубокого обучения с двумя скрытыми слоями
-
Figure 5. An example of a deep learning neural network with two hidden layers
Входные нейроны представляют собой данные, используемые для обучения. Например, если входной сигнал (вход) представляет собой изображение, входные нейроны могут представлять значения для каждого пикселя. Нейроны, скрытые в средних слоях, обычно служат для математических вычислений. Связи между нейронами уравновешиваются, определяя значимость входного значения.
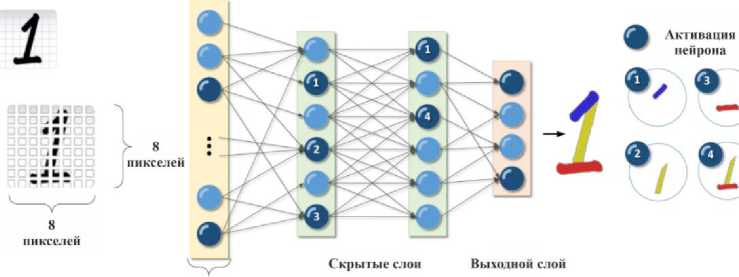
Принцип обнаружения изображения показан на рисунке 6. Этот пример показывает, как нейронная сеть может распознавать цифру на заданном изображении с разрешением восемь на восемь пикселей (столь низкое разрешение приводим для простоты примера). Все пиксели изображения передаются в качестве входных нейронов модели. Уникальность активированного нейрона определяет результат. Перед выполнением таких сложных задач каждую нейронную сеть необходимо обучить. Обучение можно описать как процесс нахождения связей между нейронами, при которых минимизируется функция потерь. Обучение может быть контролируемым и неконтролируемым.
Системы машинного обучения узнают, как комбинировать входные данные для получения полезных прогнозов на основе ранее не публиковавшихся данных. В случае машинного обучения строятся модели, исследуется множество примеров и реализуется попытка найти модель, минимизирующую потери. Потеря определяется как разница между фактическим значением и прогнозируемым выходом. Функция потерь минимизируется за счёт изменения значений весов связей между нейронами. Обучение с учителем можно использовать как для структурированных, так и для неструктурированных данных. Простые алгоритмы машинного обучения хорошо работают со структурированными данными, но когда дело доходит до неструктурированных данных, их производительность, как правило, низкая. Именно здесь нейронные сети оказались настолько эффективными и полезными. Они исключительно хорошо работают с неструктурированными данными. Структурированные данные — это чётко определённые входные данные, которые имеют значимые значения, в то время как неструктурированные данные относятся к таким вещам, как аудио и изображения, где цель состоит в том, чтобы распознать, что находится на изображении или что такое текст (например, обнаружение объекта). Здесь функциями могут быть значения пикселей в изображении, и неясно, что каждый пиксель изображения представлен в изображении, и поэтому это подпадает под неструктурированные данные [5], [7], [10—12], [20].
ВХОДНЫХ нейрона
Рисунок 6. Принцип обнаружения изображения моделью нейронной сети
-
Figure 6. The principle of image detection by a neural network model
Таким образом, система раннего обнаружения лесных пожаров может быть отнесена к категории задач бинарной классификации. Модели классификации изображений относят изображения к одной категории, обычно соответствующей наиболее заметному объекту. В лесу самым заметным объектом может быть дерево, река, куст или даже сам лес. По этой причине классификация изображений как частного решения не может быть эффективной. Присвоение метки моделям классификации изображений может стать сложным и неопределённым. Таким образом, модели обнаружения объектов больше подходят для идентификации нескольких соответствующих объектов на одном изображении или, в нашем случае, только одного дыма.
Есть ещё одно преимущество обнаружения объектов — возможность локализовать объект на изображении. Сравнение между классификацией изображений, обнаружением объектов и сегментацией экземпляров представлено на рисунке 7.

Классификация

Классификация с локализацией

Выделение объектов
Рисунок 7. Сравнение классификации

Пример детализации
изображений, обнаружения объектов и их детализации
-
Figure 7. Comparison of images classifications, objects detection and objects specification
-
3.3. Построение нейронной сети компьютерного видения для обнаружения дыма на изображениях
-
4. Обсуждение и заключение
Для улучшения системы и реализации функции обнаружения дыма на статичных изображениях сначала необходимо обучить нейронную сеть его распознавать, что можно осуществить несколькими методами. Для использования алгоритма обнаружения объектов сначала нужно определить входные данные. Входные данные (набор данных) — набор изображений, на которых присутствует и отмечено задымление. Набор данных должен быть разделён на две части — для обучения и для тестирования. Это основное требование, позволяющее избежать так называемого переобучения. Иногда после обучения нейронные сети очень хорошо работают с обучающими данными (или очень похожими изображениями) и не так хорошо с новыми изображениями. Это называется переоснащением модели [3], [20].
Некорректным подходом является использование всех данных для оценки параметров (обучения алгоритму), потому что тогда не останется данных для тестирования метода, а модель станет переобученной. Повторное использование одних и тех же данных и для обучения, и для тестирования также некорректно, поскольку для оценки модели необходимо знать, как метод будет работать на данных, которые не использовались для его обучения. Оптимальное разделение набора данных — около 75 % изображений для обучения и 25 % для тестирования [13—17], [20].
Система раннего обнаружения лесных пожаров находится в стадии дальнейшего развития. Представленные в статье модели БПЛА в настоящее время уже сняты с производства, но их ещё возможно приобрести. В то же время на смену им приходят всё более и более совершенные модели, значительно растёт список производителей БПЛА. Также немалую роль играет то, что в Российской Федерации в настоящее время оценили значимость беспилотной техники в различных отраслях и предпринимаются меры для расширения отечественного производства.
Предлагаемый подход направлен на то, чтобы улучшить имеющиеся системы обнаружения лесных пожаров и значительно снизить ущерб, вызванный несвоевременным или запоздалым их обнаружением.
Список литературы Разработка системы раннего обнаружения лесных пожаров с использованием беспилотных летательных аппаратов и искусственного интеллекта
- Анализ перспективных физических методов обнаружения возгораний / И. Р. Шегельман, О. Н. Галактионов, А. Ю. Когочев, А. С. Попов // Успехи современного естествознания. 2016. № 12. С. 335—339.
- Бобков А. В. Системы распознавания образов. М.: МГТУ им. Н. Э. Баумана, 2018. 190 с.
- Богуш Р. П., Тычко Д. А. Алгоритм комплексного обнаружения дыма и пламени на основе анализа данных систем видеонаблюдения // Доклады Белорусского государственного университета информатики и радиоэлектроники. 2015. № 6 (92). С. 63—71.
- Гибсон У. Распознавание образов. СПб.: Азбука, 2015. 384 с.
- Кириченко А. А. Основы теории искусственных нейронных сетей. Б. м., 2020. 222 с. URL: rusneb.ru. Текст: электронный.
- Красильников Н. Н. Цифровая обработка 2D- и 3D-изображений. СПб.: БХВ-Петербург, 2011. 608 с.
- Крюкова М. С., Фахми Ш. С. Сегментация полутоновых изображений лесных пожаров на основе дисперсионного анализа // Вестник Санкт-Петербургского университета Государственной противопожарной службы МЧС России: Научно-аналитический журнал. 2019. № 3. С. 103—111.
- Лесные пожары в России. «Антирекорды» и территории распространения // Информационное агентство России «ТАСС»: [сайт]. 2022. URL: https://tass.ru/info/15559017 (дата обращения: 05.09.2022).
- Лукьяница А. А., Шишкин А. Г. Цифровая обработка видеоизображений. М.: Ай-Эс-Эс Пресс, 2009. 518 с.
- Методы искусственного интеллекта в программных приложениях: Лабораторный практикум. Учебное электронное издание сетевого доступа / Б. Г. Ильясов, Е. А. Макарова, Е. Ш. Закиева, Э. Р. Габдуллина. Уфа, 2021. 153 с. URL: www.ugatu.su. Текст: электронный.
- Методы обработки и распознавания изображений лиц в задачах биометрии / Г. А. Кухарев, Н. Л. Щеголева, Ю. Н. Матвеев, Е. И. Каменская. М.: Политехника, 2013. 388 с.
- Никитин А. А., Лиманова Н. И. Процесс распознавания изображения нейронной сетью // Молодой учёный. 2020. № 47 (337). С. 23—25. URL: https://moluch.ru/archive/337/75420/ (дата обращения: 05.09.2022). Текст: электронный.
- Астратов О. С., Смирнов В. М., Филатов В. Н. Обнаружение лесных пожаров по видеоизображениям // Научная сессия ГУАП: Сб. докл. СПб.: ГУАП, 2018. С. 7—11.
- Обработка изображений в прикладных телевизионных системах / О. С. Астратов [и др.]. СПб.: ГУАП, 2012. 272 с.
- Применение алгоритмов анализа изображений для обнаружения пожаров / А. О. Кузнецов, В. М. Мусалимов, А. П. Саенко, К. В. Трамбицкий // Известия высших учебных заведений. Приборостроение. 2012. Т. 55, № 6. С. 51—56.
- Пятаева А. В. Сегментация областей задымления на видеопоследовательности // Сибирский аэрокосмический журнал. 2016. Т. 17, № 3. С. 625—630.
- Система видеомониторинга для обнаружения лесного пожара в районе промышленного предприятия // О. С. Астратов, В. М. Смирнов, В. Н. Филатов, А. В. Митько // Neftegaz.RU: Деловой журнал. 2020. № 2 (98). С. 58—61. URL: https://magazine.neftegaz.ru/articles/ tsifrovizatsiya/527122-sistema-videomonitoringa-dlya-obnaruzheniya-lesnogo-pozhara-v-rayone-promyshlennogo-predpriyatiya/ (дата обращения: 05.09.2022). Текст: электронный.
- Васюков В. Н., Зайцева А. Ю., Бондаренко В. В. Система раннего обнаружения лесных пожаров — архитектура и алгоритмы // Доклады АН ВШ РФ. 2015. № 2 (27). С. 43—56.
- Antoine C. Detection of forest fires using artificial intelligence. Année académique, 2021. 153 p.
- Artificial intelligence for forest fire prediction / G. Sakr, I. Elhajj, G. Mitri, U. Wejinya // Environmental Science, Computer Science 2010 IEEE. ASME International Conference on Advanced Intelligent Mechatronics. 2010. P. 1311—1316.
- Att squeeze u-net: A lightweight network for forest fire detection and recognition / J. Zhang, H. Zhu, P. Wang, X. Ling // IEEE Access, 9. 2021. P. 10858—10870.
- Early Forest Fire Detection Using Drones and Artificial Intelligence / D. Kinaneva, G. Hristov, J. Raychev, P. Zahariev // Conference: 42nd International Convention on Information and Communication Technology, Electronics and Microelectronics (MIPRO). 2019. P. 1060—1065.
