Разработка стенда для испытания системы управления беспилотным зерноуборочным комбайном

Автор: Годжаев Захид Адыгезалович, Крюковская Наталья Сергеевна, Сенькевич Сергей Евгеньевич
Рубрика: Расчет и конструирование
Статья в выпуске: 3 т.20, 2020 года.
Бесплатный доступ
В настоящее время робототехника стремительно развивается и охватывает все больше сфер человеческой деятельности, в том числе и сельское хозяйство. Приоритетным направлением развития производства сельскохозяйственных мобильных энергосредств (МЭС) является их роботизация и возможность выполнять свои задачи без участия человека, то есть создание беспилотных МЭС. МЭС становится беспилотным при оснащении его системой автоматического управления. Прежде чем устанавливать систему управления на МЭС, необходимо разработать алгоритмы управляющего воздействия и реакции системы управления на возможные варианты событий при работе МЭС на полях. Также необходимо выполнить отладку системы управления, выявить ошибки в работе и устранить их. Для этого рационально создать специализированные стационарные стенды, имитирующие реальные условия работы беспилотных зерноуборочных комбайнов. Для того чтобы разработанная конструкция стенда была оптимальной, составлена многокритериальная задача оптимизации конструкции с четырьмя входными и семью выходными параметрами, представляющими критерии качества функционирования стенда. На основании решения задачи оптимизации конструкции разработаны концепция стенда для испытания системы управления беспилотным зерноуборочным комбайном, гидравлическая схема стенда и его конструкция. В статье представлена 3D-модель стенда, выполненная в программе «КОМПАС-3D», на основании которой разработан комплект конструкторской документации для изготовления опытного образца стенда. Для имитации воздействия почвы различных типов на ведущие и поворотные колеса комбайна разработаны математические модели, которые используются для подачи управляющего сигнала на порошковые электромагнитные тормоза и на регуляторы расхода с электронным пропорциональным управлением.
Гидравлический стенд для испытаний, система управления, беспилотный зерноуборочный комбайн, многокритериальная задача оптимизации
Короткий адрес: https://sciup.org/147233485
IDR: 147233485 | УДК: 629.053 | DOI: 10.14529/engin200301
Unmanned combine harvester control system test stand development
Nowadays the robotics is in rapid evolution and encompasses more and more fields of human activities including agriculture. The priority growth area in production of agricultural mobile power units (AMPU) is the robotic automation thereof and making them capable to perform their duties without human involvement, i. e., creation of unmanned AMPUs. An AMPU becomes unmanned when equipped with an automatic control system. Before mounting the control system on AMPUs, system control algorithms and responses to eventual event scenarios when working in field should be developed. The control system should also be tested and tuned up; operational errors should be found out and corrected. So it seems reasonable to create special permanent stands simulating actual conditions for operating unmanned combine harvesters. To make the developed stand constructional design optimal, a multi-objective task has been drawn up to optimize the design consisting of four input and seven output parameters representing the quality criteria of the stand operation. The concept of the unmanned combine harvester control system test stand, its hydraulic system and structure have been developed based on the constructional design optimization solution results. The article presents the stand 3D model made with “COMPAS-3D”, taken as the basis for development of the engineering documentation package required to make a stand prototype. To simulate the various soil action on the combine harvester drive and swivel wheels, numerically simulated models have been developed used to transmit the control signal to the magnetic powder brakes and electronic proportionally controlled flow rate regulators.
Текст научной статьи Разработка стенда для испытания системы управления беспилотным зерноуборочным комбайном
Введение. Постоянный рост численности населения Земли и глобальная экономическая нестабильность способствуют тому, что вопросам продовольственной безопасности стало уделяться особое внимание. Беспилотная сельскохозяйственная техника поможет значительно повысить эффективность фермерских хозяйств. Это объясняется тем, что беспилотная техника сможет работать на полях круглосуточно без снижения производительности и качества. Применение беспилотных полевых роботов особенно важно при выполнении работ, сопровождающихся запыленностью, загазованностью, сильной вибрацией, высоким уровнем шума, использованием химических средств и удобрений, а также на работах с короткими агротехническими сроками их выполнения. Согласно мнению экспертов, создание беспилотных зерноуборочных комбайнов сократит потери при уборке зерновых на 30–40 % [1–5].
Для того чтобы сельскохозяйственная техника стала беспилотной, ее необходимо оснастить системой автоматического управления. Система управления устанавливается на зерноуборочный комбайн и выполняет следующие задачи:
-
– управление комбайном на основе сведений о его текущем положении, параметрах и режимах движения в пределах заданных границ поля;
-
– коррекция траектории движения комбайна при встрече с естественными или искусственными препятствиями на поле;
-
– мониторинг объектов сельскохозяйственной техники и ведение базы навигационных данных [6–10].
Прежде чем установить систему управления на комбайн, необходимо разработать алгоритмы управляющего воздействия, а также алгоритмы и параметры реакций системы управления на разного рода условия и обстоятельства, возникающие при работе зерноуборочного комбайна в поле. Разработанные алгоритмы следует испытать и выявить некорректность работы системы управления с целью дальнейшего устранения ошибок и отладки. Рационально для этих целей использовать специализированные стационарные стенды. Стенды должны имитировать реальные условия работы беспилотных зерноуборочных комбайнов с максимальной точностью.
Цель исследования . Разработать стенд для испытания системы управления беспилотным зерноуборочным комбайном.
Материалы и методы. Разработка конструкций и схем стенда напрямую связана с конкретными особенностями моделируемого объекта – зерноуборочного комбайна. При этом должно применяться элементное подобие модели и объекта, т. е. каждому значимому компоненту объекта в условиях рассматриваемой задачи должен соответствовать определенный компонент модели. Стенд должен имитировать особенности работы зерноуборочного комбайна с сохранением логической структуры работ и их последовательности выполнения во времени. Поэтому стенд должен содержать следующие основные компоненты: раму; блоки имитаций привода ведущих колес комбайна, поворотных колес комбайна, воздействия почвы на ведущие и поворотные колеса комбайна, подъема и опускания жатки; гидравлическую насосную станцию; пульт управления, комплект датчиков для контроля работы узлов стенда испытуемой системой управления; устройство регистрации информации
В качестве объекта для установки системы управления выбран зерноуборочный самоходный селекционный комбайн Wintershtiger Classic (рис. 1). Комбайн предназначен для прямого ком-байнирования (прямая уборка) зерновых колосовых, зернобобовых и других культур с делянок III и IV этапов работ в селекции, сортоиспытании и первичном семеноводстве на равнинных полях с уклоном до 8 градусов.
Было принято решение, что стенд будет представлять собой масштабную модель комбайна, используемого в качестве объекта для разрабатываемой системы управления. Поскольку приводная мощность не оказывает влияния на реакцию системы управления, то является возможным применение на стенде гидростатической трансмиссии в два раза меньшей мощности относительно мощности гидростатической трансмиссии комбайна. Это позволит, соответственно, снизить вес стенда и его энергопотребление.

Рис. 1. Зерноуборочный комбайн Wintershtiger Classic
Результаты и обсуждение. Выбор оптимальной конструкции стенда является решением многокритериальной задачи с множеством входных и выходных параметров, представляющих собой критерии качества функционирования стенда [11–14]. Входными параметрами будут являться:
-
1) Х1 – имитация воздействия почвы на ведущие колеса комбайна;
-
2) Х2 – имитация воздействия почвы на поворотные колеса комбайна;
-
3) Х3 – имитация препятствий;
-
4) Х4 – имитация поля с хлебостоем.
Выходные параметры:
-
1) Y1 – курсовая устойчивость при имитации прямолинейного движения комбайна;
-
2) Y2 – курсовая устойчивость при имитации поворота комбайна в конце гона с постоянным радиусом;
-
3) Y3 – точность изменения угла поворота колес при имитации поворота комбайна в конце гона и объезда препятствий;
-
4) Y4 – точность изменения угла наклона имитатора жатки;
-
5) Y5 – точность требуемой скорости имитации движения комбайна;
-
6) Y6 – время остановки ведущих колес при имитации торможения комбайна;
-
7) Y7 – стоимость комплектующих стенда и его эксплуатации.
Блок-схема стенда как объекта управления представлена на рис. 2.
Многокритериальная задача оптимизации конструкции стенда записывается в виде:
г Y1 = f1(X1,X2,X3,X4)i
Y2 = f 2 (X1,X2,X3,X4)
Y3 = f3(X1,X2,X3,X4)
Y4 = / 4 (X1,X2,X3,X4)
^ opt.
Y5 = f5(X1,X2,X3,X4)
Y6 = f6(X1,X2,X3,X4)
_Y7 = f7(X1,X2,X3,X4).
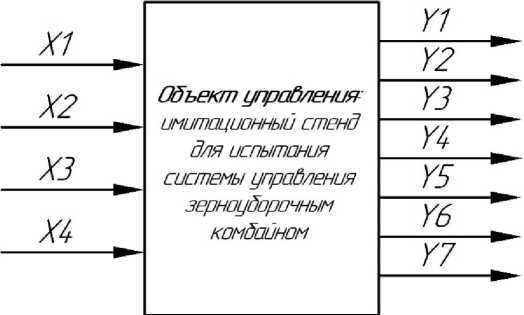
Рис. 2. Блок-схема стенда как объекта управления: Х1, Х2, Х3, Х4 – входные варьируемые параметры; Y1, Y2, Y3, Y4, Y5, Y6, Y7 – выходные параметры отклика
Для контроля выходных параметров Y1, Y2 и Y3 (курсовая устойчивость при имитации прямолинейного движения и поворота комбайна в конце гона с постоянным радиусом и точность изменения угла поворота колес при имитации поворота комбайна в конце гона и объезда препятствий) на стенде необходимо использовать датчики поворота имитатора поворотных колес комбайна, данные с которых должны передаваться испытуемой системе управления беспилотным зерноуборочным комбайном и анализироваться ей. При несоответствии значений выходных параметров требуемым нормальной реакцией испытуемой системы управления является подача управляющих сигналов для соответствующей корректировки траектории имитации движения комбайна.
Отклонение комбайна от курса происходит в результате возмущающего воздействия на его колеса дорожного покрытия [15, 16]. Это воздействие имеет случайный характер, и для его описания используется спектральная плотность, соответствующая приведенным автокорреляционным функциям и полученная в результате прямого преобразования Фурье [17]:
Sfa^f " R(t)cos(tit)dt = ^i(A1^4 + A2 f ^ ^ - '- J , л] 0 л\ 1ы2+а ^ 2 (ы2-а ^ -р ^ )+4а ^ ы2),
где R(t) – корреляционная функция; А 1 , А 2 , α 1 , α 2 , β – коэффициенты аппроксимации автокорреляционной функции (табл. 1); ω – частота колебаний, 1/с; σ z – среднеквадратическое отклонение высоты неровностей от нулевого значения.
Реализация случайной функции, описывающей высоту неровностей поверхности в произвольный момент времени:
Ую=<(t) ^А1^2|^
A2s^ 2a2a2jh+A2^ 2a2a2jh 8г+2а28+а 2 +р 2
■ J«22+Pi^
где ^(t) - дискретный белый шум; h - шаг интегрирования; s - оператор дифференцирования.
Спектральная плотность (2) в диапазоне частот, ограниченном частотой ω max , будет обеспечиваться с необходимой точностью при условии выполнения неравенства:
Таблица 1
Коэффициенты аппроксимации автокорреляционной функции некоторых типов микропрофиля сельскохозяйственных полей и дорог [18]
|
Поверхность |
σ z , см |
А 1 |
А 2 |
α 1 , 1/м |
α 2 , 1/м |
β , 1/м |
|
Грунтовая дорога |
2,12 |
– |
1,0 |
– |
0,58 |
0,63 |
|
Пропашное поле |
2,15 |
– |
1,0 |
– |
0,57 |
0,59 |
|
Стерня пшеницы |
2,4 |
– |
1,0 |
– |
0,42 |
0,29 |
|
Стерня колосовых культур |
3,26 |
0,9 |
0,1 |
0,7 |
0,2 |
1,57 |
Ш0 > 2^ max ,
где ω 0 – частота Шеннона.
Частота Шеннона для основных технологических процессов почвообработки, 1/с [18]:
Шо < 25,
При подстановке значений коэффициентов аппроксимации из табл. 1 и значений частоты Шеннона (5) в уравнение (3) получаются сигналы возмущающих воздействий на стенде Х1 (имитация воздействия почвы на ведущие колеса комбайна) и Х2 (имитация воздействия почвы на поворотные колеса комбайна), имитирующие воздействие различных типов поверхностей на ведущие и поворотные колеса комбайна.
Для контроля выходного параметра Y4 (точность изменения угла наклона имитатора жатки) на стенде должен применяться датчик наклона имитатора жатки или датчик, измеряющий изменение высоты определенной точки имитатора жатки над уровнем пола цеха. Входящий сигнал Х4 (имитация поля с хлебостоем) на стенде имитирует высоту хлебостоя и влияет на изменение угла наклона имитатора жатки. Современные технологии позволяют имитировать хлебостой программными средствами. Испытуемая система управления зерноуборочным комбайном считывает и анализирует сигналы Х4 и Y4. При несоответствии значений угла наклона имитатора жатки высоте хлебостоя в конкретный момент времени испытуемая система управления подает корректирующий сигнал.
Контроль выходного параметра Y5 (точность требуемой скорости имитации движения комбайна) на стенде выполняется с помощью датчиков, измеряющих частоту вращения имитаторов ведущих колес комбайна. При выявлении отклонений от требуемых значений испытуемая система управления подает соответствующий сигнал на элементы стенда, отвечающие за регулировку частоты вращения имитаторов ведущих колес комбайна.
Входящий параметр Х3 (имитация препятствий) задается программными средствами или посредством обработки изображений, полученных с видеокамер испытуемой системы управления. Система управления беспилотным зерноуборочным комбайном должна распознавать различные препятствия, представляющие опасность во время работы комбайна. Такими препятствиями являются камни, столбы линий электропередач, люди, животные, другая техника. При обнаружении препятствия система управления должна изменить траекторию имитации движения комбайна с целью объезда препятствия, а при необходимости еще и снизить скорость движения (вращения имитатора ведущих колес комбайна).
Непосредственно разработку конструкции стенда можно разделить на несколько этапов:
-
1) разработка гидравлической схемы стенда [19];
-
2) подбор элементной базы стенда;
-
3) подбор и сравнительная оценка необходимых датчиков;
-
4) проработка схемы размещения компонентов стенда относительно друг друга и на раме стенда;
-
5) разработка алгоритмов и методик испытаний системы управления на стенде;
-
6) выполнение оценки технико-экономических показателей разработанного стенда.
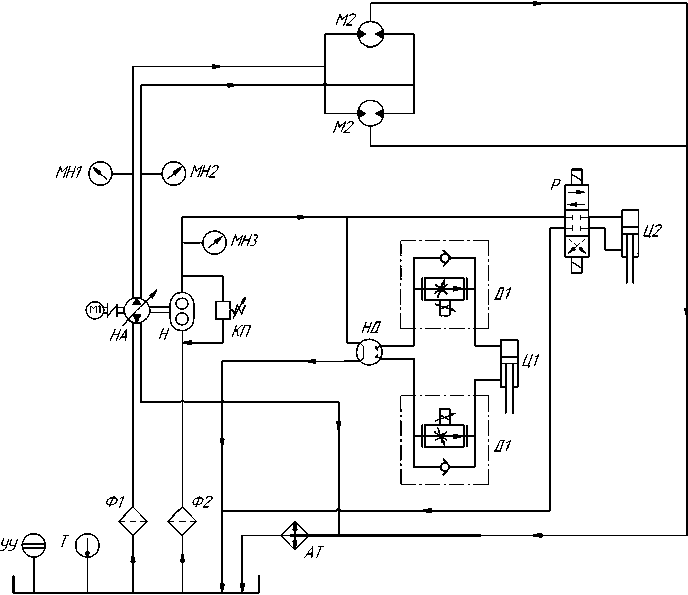
Гидравлическая схема соединений гидрокомпонентов представлена на рис. 3.
Общий вид стенда (3D-модель, выполненная в программе «КОМПАС-3D») представлен на рис. 4. Стенд состоит из рамы сварной конструкции – 1, на которой смонтированы основные компоненты стенда: два блока имитации привода ведущих колес комбайна – 2, блок имитации системы поворота комбайном – 3, блоки имитации воздействия почвы на ведущие колеса – 4 и на поворотные колеса – 5 комбайна, блок имитации подъема и опускания жатки – 6, насосная гидравлическая станция – 7, электрический шкаф – 8 и стойка управления – 9.
Почва воздействует на колеса комбайна стохастически. Поэтому для имитации воздействия почвы на поворотные колеса комбайна (нагрузки в рулевом управлении) был принят способ дросселирования рабочей жидкости на рабочих линиях насос-дозатора. При этом изменение давления масла должно приближенно имитировать воздействие почвы на колеса. Подобное дросселирование может обеспечить только регулятор расхода с электронным пропорциональным управлением, позволяющий изменять давление масла в широких пределах за короткий промежуток времени.
Для имитации воздействия почвы на ведущие колеса комбайна используются порошковые электромагнитные тормоза, задача которых состоит в подтормаживании валов гидромоторов. Устройство порошкового тормоза позволяет регулировать (изменять) силу торможения, тем самым обеспечивая имитацию воздействия на ведущие колеса почвы различного типа.
Стенд предназначен для испытания системы управления беспилотным комбайном. Поэтому на раме стенда предусмотрены места для крепления элементов системы управления: нейросетевых вычислителей – 10, видеокамер – 11, подруливающего устройства – 12, привода задатчика оборотов – 13.
Стенд имеет разъем для подключения к нему ноутбука с установленным на него специальным программным обеспечением. Программное обеспечение содержит 3D-изображение поля с отражением препятствий и характера хлебостоя, а также обеспечивает отображение результатов испытаний системы управления беспилотным комбайном и их сохранение на жесткий диск ноутбука.
Для проверки адекватности работы испытуемой системы управления в конструкцию стенда входят следующие датчики:
-
1) датчик крутящего момента М40-60 (ООО «ТИЛКОМ») – 2 шт. (для контроля крутящего момента, возникающего на валах гидромоторов блоков имитации привода ведущих колес комбайна и частоты их вращения в результате подтормаживания, обеспечиваемого порошковыми тормозами, имитирующими воздействие почвы на ведущие колеса);
-
2) датчик ДПДЗ 2112-1148200 (АО «АВТОВАЗ») – 2 шт. (для контроля угла поворота имитаторов поворотных колес и угла подъема и опускания имитатора жатки);
-
3) датчик давления NAT8252.84.2517.32 (Trafag Sensors & Controls) – 3 шт. (для контроля давления в магистралях высокого давления (на выходах гидронасосов), 0 ... 400 бар.
Также стенд оснащен дополнительными датчиками для контроля системы управления стендом за его работой:
-
1) датчик уровня масла марки ПДУ-1.1 – 2 шт. (контроль уровня масла в гидравлическом баке);
-
2) датчик температуры ОВЕН ДТС 054-50М.В3.60/1 (ООО «ОвенКомплектАвтоматика») – 1 шт. (контроль температуры в гидравлическом баке);
-
3) термостат OMT T04-М22х1.5 (OMT S.p.A) – 1 шт. (контроль включения в работу теплообменника при превышении температуры масла значений более 50.. ,70 ° С).
На разработанный стенд получен патент № 2728860 [20].
Б
Рис. 3. Схема гидравлическая стенда для испытаний системы управления беспилотным зерноуборочным комбайном: АТ – агрегат теплообменный ГСТ; Б – бак гидравлический; Д1 – регулятор расхода двухлинейный прямого действия с электронным пропорциональным управлением; КП – клапан предохранительный; М1 – электродвигатель; М2 – гидромотор аксиально-поршневого типа нерегулируемый; МН1, МН2, М3 – манометр; НШ – насос шестеренный; НА – насос аксиально-поршневого типа регулируемый; НД – насос-дозатор; Р – гидрораспределитель с электроуправлением; Т – датчик температуры; УУ – указатель уровня в баке; Ф1 – фильтр всасывающий ГСТ; Ф2 – фильтр всасывающий;
Ц1, Ц2 – гидроцилиндр
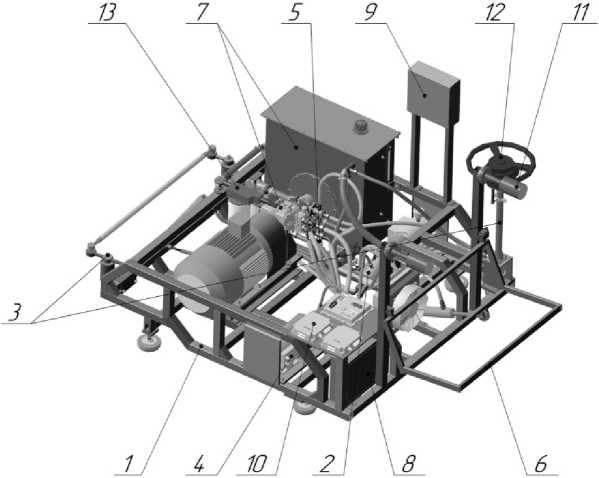
Рис. 4. Общий вид стенда для испытания системы управления (СУ) беспилотным комбайном: 1 – рама; 2 – блок имитации привода ведущих колес комбайна; 3 – блок имитации системы поворота комбайном; 4 – блок имитации воздействия почвы на ведущие колеса; 5 – блок имитации воздействия почвы на поворотные колеса; 6 – блок имитации подъема и опускания жатки; 7 – насосная гидравлическая станция; 8 – электрический шкаф; 9 – стойка управления; 10 – нейросетевой вычислитель СУ;
11 – видеокамера СУ; 12 – подруливающее устройство СУ; 13 – привод задатчика оборотов СУ
Заключение. В результате выполненной работы:
-
1) разработаны математические модели, позволяющие имитировать на стенде воздействие почвы (микропрофилей сельскохозяйственных дорог и полей различного типа) на ведущие и поворотные колеса комбайна.
-
2) разработана концепция стенда, подобрана компонентная база и разработана гидравлическая схема соединений стенда.
-
3) выбраны функциональные параметры и разработана конструкция стенда для испытания системы управления беспилотным зерноуборочным комбайном.
Работа выполнена при финансовой поддержке Минобрнауки России в целях достижения результатов проекта по лоту шифр № 2019-05-576-0001 (шифр заявки 2019-05-576-0001-234). Соглашение № 075-15-2019-1692 от 06.12.2019 г. Уникальный идентификатор проекта RFMEFI60419X0225.
Список литературы Разработка стенда для испытания системы управления беспилотным зерноуборочным комбайном
- Колчин, Н.Н. Задачи и проблемы возрождения отечественного сельскохозяйственного машиностроения / Н.Н. Колчин, В.Н. Зволинский // Тракторы и сельхозмашины. – 2020. –№ 1. – С. 77–81. DOI: 10.31992/0321-4443-2020-1-77-81.
- Артеменко, М.Н. Тенденции развития беспилотных роботизированных комплексов. Опыт отечественных и зарубежных производителей / М.Н. Артеменко, П.А. Корчагин, И.А. Тетерина // Вестник Сибирского государственного автомобильно-дорожного университета. – 2019. – № 4 (68). – С. 416–430.
- Analysis of main tasks of precision farming solved with the use of robotic means / V. Nguyen, Q. Vu, O. Solenaya, A. Ronzhin // Zavalishin's reading: materials of the 12th international scientifictechnical conference on electromechanics and robotics. – 2017. – P. 02009. DOI: 10.1051/matecconf/201711302009.
- Bechar, A. Agricultural robots for field operations / A. Bechar, C. Vigneault // Part 2: Operations and systems. Research Paper. – 2017. – Vol. 153. – P. 110–128. DOI: 10.1016/j.biosystemseng.2016.11.004.
- Development of Robot Combine Harvester for Beans using CAN Bus Network / M. Saito, K. Tamaki, K. Nishiwaki et al. // Horticulture and Post Harvest Industry: Materials of the 4th IFAC Conference on Modelling and Control in Agriculture, Espoo, Finland. – 2013. – P. 148–153.
- Tsarev, Y. Automatization of settings of working organs of technological process of combine harvester / Y. Tsarev, E. Adamcikova, M. Najie // Icmtmte 2018: Materials of the 2018 international conference on modern trends in manufacturing technologies and equipment, Matec WEB of Conferences. Sevastopol, EDP Sciences. – 2018. – P. 5–19. DOI: 10.1051/matec-conf/201822405019.
- Serebrenny, V. Approaches to the robotization of agricultural mobile machines / V. Sereb-renny, M. Shereuzhev, I. Metasov // Zavalishin's readings: Materials of the 13th international conference on electromechanics and robotics, Matec WEB of Conferences, St. Petersburg, EDP Sciences – 2018. – P. 3–14. DOI: 10.1051/matecconf/201816103014.
- Калачин, С.В. Алгоритм управления режимами работы машинно-тракторного агрегата / С.В. Калачин // Тракторы и сельхозмашины. – 2019. – № 3. – C. 45–50. DOI: 10.31992/0321-4443-2019-3-45-50.
- Скворцов, Е.А. Необходимость инновационного развития сельского хозяйства на основе применения робототехники / Е.А. Скворцов, Е.Г. Скворцова, А.А. Орешкин // Вестник Всероссийского научно-исследовательского института механизации животноводства. – 2016. – № 1 (21). – C. 85–90.
- Design and implementation of unmanned agricultural machinery / R. Jang, F. Kasimov, D. Zhang, K. Kaliyeva // IOP conference series: materials science and engineering: Materials of the 2019 international conference on intelligent control, measurement and signal processing, ICMSP 2019, Xi'an, Institute of Physics Publishing. – 2020. – P. 012032. DOI: 10.1088/1757-899X/799/1/012032.
- A Software system to solve the multi-criteria optimization problem with stochastic constraints/ L.M. Bohdanova, L.V. Vasilyeva, D.E. Guzenko, V.M. Kolodyazhny // Cybernetics and Systems Analysis, Springer New York Consultants Bureau. – 2018. – Vol. 54, № 6. – P. 1013–1018. DOI: 10.1007/s10559-018-0104-2.__
- Гарина, С.В. Оптимизация многокритериальных решений / С.В. Гарина, Б.М. Люпаев, М.Б. Никишин // Вестник Мордовского университета. – 2015. – Т. 25, № 4. – С. 12–17. DOI: 10.15507/0236-2910.025.201504.012.
- Simulation of the dynamic processes of a low-capacity combine harvester movemen / Z. Godzhaev, S. Senkevich, V. Kuzminу et al. // 2019 topical problems of green architecture, civil and environmental engineering, TPACEE 2019: Materials of the E3S WEB of conferences, Moscow, EDP Sciences. – 2020. – P. 06009. DOI: 10.1051/e3sconf/202016406009.
- Ghosh, D. A new Pareto set generating method for multi-criteria optimization problems / D. Ghosh, D. Chakraborty // Operations Research Letters. – 2014. – Vol. 42, Iss. 8. – P. 514–521. DOI: 10.1016/j.orl.2014.08.011.
- Бойков, В.П. Улучшение курсовой устойчивости тракторов «Беларус» / В.П. Бойков, А.И. Бобровник, С.А. Дорохович // Наука и техника. – 2016. – Т. 15, № 3. – С. 183–192.
- Таричко, В.И. К вопросу о динамической нагруженности несущих конструкций специальных колесных шасси / В.И. Таричко, П.И. Шалупина // Вестник концерна ВКО «Алмаз-Антей». – 2019. – № 4 (31). – С. 73–83.
- Лурье, А.Б. Статическая динамика сельскохозяйственных агрегатов / А.Б. Лурье – Л.: Колос, 1970. – 370 c.
- Бровцин, В.И. Моделирование микропрофиля поверхности полей и дорог / В.И. Бровцин // Технологии и технические средства механизированного производства продукции растениеводства и животноводства. – 2015. – № 86. – С. 59–68.
- Проектирование гидравлических систем машин: учебное пособие для студентов вузов по специальностям «Гидравлические машины, гидроприводы и гидропневмоавтоматика», «Автоматизация технологических процессов и производств» / Г.М. Иванов, С.А. Ермаков, Б.Л. Коробочкин, Р.М. Пасынков. –М.: Машиностроение, 1992. –224 с.
- Патент 2728860 РФ. Стенд для имитационного испытания системы управления беспилотным зерноуборочным комбайном / З.А. Годжаев, А.В. Дунаев, А.В. Лавров и др.; заявитель и патентообладатель ФГБНУ ФНАЦ ВИМ. –№ 2020107178, заявл. 17.02.2020; опубл. 30.07.2020, Бюл. № 22.__
