Разработка установки для определения однородности смешивания комбикорма методом цифровой обработки изображений

Автор: Булатов С.Ю., Герасимов Е.А., Малышев Г.С., Тареева О.А.
Журнал: Вестник Омского государственного аграрного университета @vestnik-omgau
Рубрика: Агроинженерия
Статья в выпуске: 1 (53), 2024 года.
Бесплатный доступ
Впервые в инженерно-технической литературе предлагается распределенная система фото/видеорегистрации на базе USB-эндоскопов, предназначенная для научных исследований непрозрачных сыпучих сред. Исходя из специфики съемки в непрозрачной среде, даются требования к системе фото/видеорегистрации и ее компонентам. Кратко изложены возможные системы для распределенной съемки. Описываются технологические новшества в устройстве бытовых USB-эндоскопов, которые позволяют существенно снизить стоимость проектируемой системы. Рассматриваются преимущества предлагаемой системы по сравнению с другими возможными схемами. Дается подробная схема монтажа камер эндоскопов внутри защитных боксов, предлагается оригинальный способ механической защиты кабелей эндоскопа внутри бака с сыпучей смесью. Приводятся фотографии системы фото/видеорегистрации на различных этапах ее монтажа в баке смесителя. Сформулированы рекомендации, позволяющие минимизировать влияние бликов от встроенных осветителей на качество изображения сыпучей среды. Описываются аппаратные и программные средства, необходимые для подключения множества эндоскопов к единой электронно-вычислительной машине. Приводятся образцы изображений, полученных с помощью разработанной системы внутри непрозрачной кормовой смеси. Дается пример практического использования изображений смеси, полученных с помощью системы на базе USB-эндоскопов.
Система видеорегистрации, usb-камеры, коэффициент вариации, кормосмесь, цветовая сегментация
Короткий адрес: https://sciup.org/142240540
IDR: 142240540 | УДК: 631.3
Development of an installation for determining the uniformity of mixed feed by digital image processing
For the first time in the engineering and technical literature, a distributed photo/video recording system based on USB endoscopes is proposed, designed for scientific research of opaque bulk media. Based on the specifics of shooting in an opaque environment, the requirements for the photo/video recording system and its components are given. Possible systems for distributed surveying are briefly described. Technological innovations in the device of household USB endoscopes are described, which significantly reduce the cost of the designed system. The advantages of the proposed system in comparison with other possible schemes are considered. A detailed diagram of the installation of endoscope cameras inside protective boxes is given, an original method of mechanical protection of endoscope cables inside a tank with a bulk mixture is proposed. Photographs of the photo/video recording system at various stages of its installation in the mixer tank are provided. Recommendations are formulated to minimize the effect of glare from built-in illuminators on the image quality of the environment. The hardware and software tools necessary to connect many endoscopes to a single electronic computer are described. Samples of images obtained using the developed system inside an opaque feed mixture are presented. An example of the practical use of images of the mixture obtained using a system based on USB endoscopes is given.
Текст научной статьи Разработка установки для определения однородности смешивания комбикорма методом цифровой обработки изображений
В процессе приготовления комбикормов для сельскохозяйственных животных важно равномерное распределение всех компонентов, а особенно микроэлементов, по всему объему кормосмеси, оцениваемое коэффициентом однородности [1; 2]. Традиционно степень однородности кормосмеси определяют методом отбора проб после смешивания [3]. Однако благодаря современным цифровым технологиям возможна оценка степени распределения компонентов по объему в реальном времени с использованием системы видеорегистрации, смонтированной непосредственно в смесителе.
Информационный поиск показал, что в настоящее время не существует готовых коммерческих решений по обеспечению многоканальной видеорегистрации данных внутри непрозрачных сыпучих сред. Исходя из коммерческих предложений, полученных от фирм, занимающихся внедрением систем видеорегистрации, было установлено, что разработка и монтаж системы из 15 камер внутри бака смесителя обойдется в сумму не меньше 55 тысяч долларов США. Столь внушительная сумма объясняется серьезными трудностями, связанными с монтажом камер внутри непрозрачных сыпучих средств, а также с тем, что камеры должны иметь малые габариты и при этом обеспечивать малые оптические аберрации (искажения).
Учитывая дороговизну предлагаемых коммерческих решений, авторы статьи решили разработать собственную систему видеорегистрации, суммарная стоимость которой не превысила бы 225 000 рублей. В результате было предложено оригинальное инженерно-техническое решение, основанное на использовании дешевых эндоскопов (порядка 3600 рублей за штуку).
Vestnik of Omsk SAU, 2024, no. 1 53) AGROENGINEERING
Материалы и методы
Выбор системы видеорегистрации, пригодной для работы внутри непрозрачной сыпучей среды . Изначально авторы провели информационный поиск, направленный на выявление надежных методов подключения множества камер к одной электронно-вычислительной машине (ЭВМ). В связи со спецификой реализуемого проекта потенциально возможные системы фото/видеорегистрации и их компоненты должны удовлетворять следующим условиям:
-
– системы регистрации должны фиксировать изображение непрозрачных сыпучих сред при монтаже камеры или оптоволоконного световода, идущего к камере, прямо внутри среды. Требование связано с тем, что внутри непрозрачной среды не существует источников света, что делает недопустимым монтаж камер непосредственно внутри смеси: всякое фотоизображение – это результат воздействия отраженных от предмета съемки световых лучей на цифровую матрицу или аналоговую пленку. В непрозрачной среде отсутствуют световые лучи видимого диапазона электромагнитного спектра, что делает невозможным фото и видеорегистрацию. Использование инфракрасных камер недопустимо в связи с потерей информации о цвете различных компонентов смеси. Таким образом, объектив камеры должен быть предварительно смонтирован в герметичном боксе, причем оптическая ось объектива должна проходить через прозрачные участки бокса [4]. В самом боксе или вокруг объектива необходимо предусмотреть источники освещения. Другой вариант – прокладка оптоволоконного световода от места съемки к объективу камеры [5; 6];
-
– объем монтируемой в баке системы видеорегистрации должен быть значительно меньше (минимум в 20 раз), нежели объем бака смесителя. В противном случае система будет существенно влиять на сам процесс перемешивания. Кроме того, крупные габариты защитных боксов значительно усложняют монтаж в баке смесителя;
-
– объектив камеры должен характеризоваться малыми оптическими аберрациями (искажениями) при съемке с малого расстояния (не более 10 см между торцом объектива и прозрачной частью защитного бокса) [7]. Требование связано с тем, что проектируемая система создается с целью полной автоматизации процесса определения качества перемешивания смеси с помощью цифровых методов обработки изображений [8–10]. Данные методы требуют, чтобы увеличение изображения смеси было равномерным по всей информативной части кадра. В противном случае не будет возможности корректно оценить соотношения площадей компонентов смеси, расположенных в различных частях изображения. Под информативной частью кадра понимается та его часть, которая содержит изображения только самой смеси (без засветок и без непрозрачной части бокса);
-
– камеры, которые будут монтироваться внутри среды, должны быть записаны от удаленного источника питания. Питание камеры от внутреннего аккумулятора недопустимо, так как камеры будут располагаться в труднодоступном месте. В связи с этим заряд аккумулятора потребовал бы серьезных временных затрат на демонтаж камеры с последующим изъятием и перезарядкой аккумулятора;
-
– питание камер должно осуществляться по тому же кабелю, по которому происходит передача данных. В противном случае необходимо будет использовать сразу два кабеля на камеру (один питающий, другой для передачи данных), что вызовет дополнительные трудности при монтаже системы;
-
– провода, идущие от камер, должны иметь длину не менее пяти метров, что позволит вывести их из бака смесителя. Использование беспроводных wi-fi камер недопустимо, так как радиосигнал от них будет затухать внутри смеси, а сам металлический бак смесителя хорошо экранирует любое электромагнитное излучение.
Vestnik of Omsk SAU, 2024, no. 1 53) AGROENGINEERING
По результатам поиска была сделана подборка существующих методов подключения множества камер к одной ЭВМ, удовлетворяющих сформулированным выше требованиям:
-
– использование цифровых PoE камер, подключаемых по кабелю Ethernet (под разъем RJ-45) к многопортовому коммутатору (свитчу) [11];
-
– использование цифровых камер с USB-интерфейсом, подключаемых к USB-коммутатору;
-
– использование оптоволоконных световодов, идущих от места съемки к объективу камеры [5; 6].
Рассмотрим все три схемы отдельно, укажем их преимущества и недостатки. Первая схема основана на подключении множества цифровых PoE камер к многопортовому коммутатору (свитчу) [12; 13]. Подключение производится по кабелю Ethernet (под разъем RJ-45). Затем коммутатор подключается к ЭВМ. PoE расшифровывается как Power over Ethernet – дословно «питание через Ethernet». Ethernet кабель – это кабель на базе витой пары UTP, который используется для подключения интернета на обычных персональных компьютерах [14]. Технология PoE позволяет одновременно передавать данные и питать оборудование через кабель связи «витая пара». Отдельного источника питания и соответственно еще одного кабеля к розетке не понадобится. Один кабель решает все вопросы. У видеокамеры PoE есть коннектор RJ-45, и этого разъема достаточно, чтобы подключить ее к коммутатору с помощью кабеля Ethernet. При расстоянии между коммутатором и объектом съемки меньше 100 м соединение с коммутатором происходит напрямую через витую пару UTP, это основное преимущество первой схемы.
Чтобы объединить несколько цифровых камер в единую сеть, используется коммутатор. Данное сетевое устройство также может носить название «свитч». PoE коммутатор – это коммутатор, который передает данные и питание по одному интерфейсу. То есть, чтобы запитать цифровую камеру, достаточно подключить ее к PoЕ разъему switch.
Несмотря на высокое распространение, схема на базе цифровых PoE камер, подключаемых по кабелю Ethernet к PoE коммутатору, не подходит для решения задачи видеорегистрации в силу того, что все камеры, работающие с интерфейсом Ethernet, имеют большие габариты (поперечный размер от 4 см), что затрудняет их монтаж в защитном боксе, о котором говорилось в требованиях к создаваемой системе. В процессе поиска бюджетных малогабаритных камер была найдена мини IP камера Zodikam 180-P (камера имеет квадратное сечение с длиной ребра 40 мм). Однако указанные камеры обладают большой дистанцией фокусировки, поэтому получение резкого изображения в кадре возможно только при использовании защитных боксов большой длины. Для камер больших размеров дистанция фокусировки еще больше возрастает. Монтаж крупногабаритных боксов, рассчитанных под большие камеры с большой дистанцией фокусировки, недопустим, так как бак смесителя по объему должен быть значительно больше (минимум в 20 раз), чем вся система видеорегистрации.
Главное ограничение цифровых PoE камер состоит в их широкоугольности: имеющиеся в продаже дешевые PoE камеры дают сильные искажения изображения (аберрации) при малых расстояниях от торца объектива до объекта съемки. Например, на рис. 1 показано изображение, полученное с помощью IP камеры. Фотография получена с расстояния 10 см от торца объектива. Хорошо проявляется эффект бочкообразной дисторсии [15], когда увеличение в разных частях изображения существенно различается (эффект «рыбьего глаза»). Изображение в центре сильно размыто. Данные эффекты практически исчезают при удалении торца объектива на 20 см от объекта съемки (рис. 2). Но съемка с такого расстояния предполагает установку защитных боксов с размером не менее 20 см вдоль оптической оси объектива. Для большинства баков такая система
Vestnik of Omsk SAU, 2024, no.1 53)
AGROENGINEERING
не будет удовлетворять требованию малости объема по сравнению с объемом самого бака смесителя. Малогабаритные PoE камеры с объективами без значительных аберраций увеличивает смету проекта минимум на порядок, что противоречит идее создания бюджетной системы видеорегистрации. Указанные ограничения делают непригодными PoE камеры для реализации проекта.

Рис. 1 . Бочкообразная дисторсия и размытости при съемке PoE камерой (расстояние от смеси до торца объектива составляет 0 см).
Съемка велась вне бака смесителя

Рис. 2 . Съемка PoE камерой с расстояния 20 см вне бака смесителя
Рассмотрим второй вариант подключения множества камер к одной ЭВМ: использование цифровых камер с USB-интерфейсом, подключаемых к USB-коммутатору. Принципиальная схема подключения для данного варианта практически ничем не отличается от первого, только вместо разъемов RJ-45 будут использоваться USB-разъемы (как в камерах, так и в коммутаторах). До недавних пор основным недостатком систем на USB-интерфейсе являлись существенные ограничения на длину USB-кабеля. Например, для USB 2.0 эта длина составит всего 5 метров. Однако сейчас все чаще для USB 2.0 используются активные USB-кабели, которые могут достигать в длину до 30 метров, что достаточно для реализации настоящего проекта. Важно отметить, что появление таких длинных кабелей с USB-разъемами открывает серьезные перспективы для создания систем наблюдения на USB-камерах.
Сейчас в продаже появились USB-эндоскопы с длиной кабеля до 20 метров, средняя стоимость которых в российских магазинах составляет 3600 рублей. Поэтому нет необходимости делать заказы на зарубежных площадках, доставка с которых занимает порядка месяца. Важнейшее преимущество таких эндоскопов – малые искажения изображения при съемках с малых дистанций (уже при расстоянии 7–8 см до объекта съемки обеспечивается достаточная резкость изображения). Кроме того, камеры эндоскопа имеют диаметр не более 8 мм, что существенно облегчает задачу монтажа этих камер внутри защитных боксов. Наконец, все имеющиеся в продаже бюджетные эндоскопы снабжены кольцевым осветителем на торце объектива, который питается непосредственно по активному USB-кабелю, то есть при монтаже камеры эндоскопа в боксе не надо заботиться об установке источника света. В результате сравнения преимуществ и недостатков USB и PoE систем видеорегистрации был сделан выбор в пользу систем на USB-интерфейсе.
В процессе информационного поиска не удалось найти ни одного источника, где бы описывалась распределенная система видеорегистрации на базе USB-камер для решения исследовательских задач. Вероятно, в данной статье впервые в инженерно-технической литературе предлагается подобная схема.
Vestnik of Omsk SAU, 2024, no. 1 53) AGROENGINEERING
Несколько слов надо сказать о методе, основанном на использовании волоконных световодов [16]. Уникальность оптоволокна в том, что даже если торец оптоволокна находится в непрозрачной среде (кормовой смеси, например), то на другом торце световода все равно будут видны частицы смеси, соприкасающиеся с погруженным торцом световода. Этот эффект объясняется отражением световых лучей: свет, падающий на наружный торец световода, проходит по оптоволокну к погруженному в среду торцу, затем отражается от смеси и возвращается по оптоволокну к открытому концу. То есть наблюдатель будет видеть отраженный от смеси свет. Таким образом, достаточно смонтировать открытый торец световода рядом с объективом камеры и производить съемку открытого торца.
Тем не менее, метод, основанный на использовании оптоволоконных жгутов, несмотря на некоторые его преимущества, не может быть реализован в настоящем проекте ввиду отсутствия готовых коммерческих предложений по оптоволоконным жгутам большого диаметра (более 5 см в поперечном размере), укладывающихся в смету проекта. Кроме того, необходимо подчеркнуть, что открытый торец оптоволокна должен быть освещен, что существенно усложнит сопряжение торца световода с камерой. Поэтому везде в дальнейших исследованиях использовались USB-эндоскопы.
При использовании системы из нескольких USB-камер необходимо иметь USB-коммутатор, чтобы увеличить количество USB-портов на компьютере. Это позволит подключить все необходимые камеры и использовать их одновременно. Но качество записи может снижаться в зависимости от количества камер. Кроме того, некоторые USB-камеры могут потреблять много энергии, что также может влиять на качество записи. В данном случае необходимо использовать активные USB-коммутаторы, которые позволят обойти данную проблему.
Локализация бликов от кольцевого осветителя. Необходимо рассказать о серьезной проблеме, которая присуща методам, предполагающим монтаж камер в защитном боксе, – это отражение источника света от прозрачной стенки защитного бокса. Имеющиеся в продаже камеры с подсветкой практически всегда используют кольцевые светодиодные осветители, расположенные вокруг объектива. Так как оптическая ось объектива должна проходить через прозрачные участки бокса, то на этих участках неизбежно будут возникать блики от осветителя, которые невозможно полностью устранить. Единственный способ – использование белых рассеивателей света с прорезями для объектива: свет осветителя будет падать на рассеиватель, в результате чего зона соприкосновения смеси с прозрачным ограждением будет освещаться рассеянным светом, что значительно уменьшит эффект бликов.
В рассеивателе необходимо предусмотреть отверстие для объектива (диаметр отверстия должен быть меньше диаметра объектива). Сам рассеиватель должен находиться на некотором расстоянии от объектива (в противном случае светодиоды будут просвечивать через рассеиватель), что приведет к ограничению угла обзора. Кроме того, монтаж рассеивателя и подбор расстояния от него до объектива является трудоемкой задачей. Монтаж рассеивателя накладывает жесткие требования на вибро/ударостойкость конструкции, которая предполагает неподвижность элементов системы «объектив – рассеиватель» друг относительно дуга. Даже незначительные сдвиги отверстия рассеивателя в плоскости, перпендикулярной оптической оси объектива, скорее всего приведут к изменению области обзора и появлению бликов от светодиодов. Поэтому на текущем этапе исследований ставилась задача подобрать такую схему монтажа камер, при которой не требуется установка рассеивателя, но при этом влияние бликов на качество изображения будет минимизировано.
Vestnik of Omsk SAU, 2024, no.1 53)
AGROENGINEERING
В случае локализации бликов внутри малой (по сравнению с информативной областью) площади кадра, последующий анализ изображений смеси не будет сопряжен с существенными трудностями. Связано это с тем, что в дальнейшем информация с камер будет анализироваться с помощью нейронных сетей, которые будут сегментировать изображения (выделять на изображении компоненты смеси по какому-либо признаку: цвету, форме, текстуре, размеру). Однако, блики, которые будут присутствовать на изображении в центре прозрачного окна, не столь существенны при сегментации изображений с помощью нейронных сетей. Нейронная сеть в процессе обучения будет выявлять признаки, присущие смеси с различным качеством перемешивания. И для такого обучения достаточно той части изображения, что лежит вне области бликов. Сами блики не несут информации и будут игнорироваться обученной нейронной сетью в процессе распознавания. Но даже если использовать классические методы цифровой обработки изображений [17], то для случая, когда площадь засветки будет много меньше площади информативной части изображения, эти методы не дадут существенной погрешности при определении концентрации компонентов смеси.
То есть важно разработать методику для локализации бликов и засветок внутри малой области кадра. В ходе экспериментов было установлено, что эффекты неравномерности бликов существенно снижаются при использовании плоских прозрачных окон без выпуклостей. На рис. 3 показана съемка в защитном боксе, созданном на базе бытовой банки: в силу технологических особенностей производства дно таких банок не является идеально плоским, что увеличивает площадь бликования. Кроме того, для разных банок будет своя форма бликов, что усложнит обучение нейронной сети и не позволит создать универсальной программы для случая, когда изображение будет обрабатываться с помощью классических методов цифровой обработки.

Рис. 3. Эффект бликования на технологических неровностях на дне бытовой банки

Рис. 4. Локализация бликов в центре плоского стекла (сами блики отличаются строгой геометрией). Видно отражение крышки, состоящей из нескольких кольцевых сегментов
Для выбранных эндоскопов достаточная резкость изображения достигалась при монтаже торца объектива на расстоянии 7–8 см от стекла, поэтому размер защитного бокса также составляет порядка 8 см вдоль оптической оси объектива.
Сформулируем еще раз все рекомендации, выработанные в ходе экспериментальных исследований по монтажу камеры в защитном боксе с источником освещения:
Vestnik of Omsk SAU, 2024, no.1 53)
AGROENGINEERING
-
– в качестве источника освещения может использоваться кольцевой осветитель, расположенный на объективе камеры;
-
– защитный бокс должен иметь чернение на внутренней поверхности;
-
– прозрачная поверхность защитного бокса должна являться плоской и быть перпендикулярной оптической оси объектива;
-
– крышка защитного бокса должна являться плоской и однотонной;
-
– для выбранных эндоскопов расстояние от торца объектива до объекта съемки должно составлять порядка 7–8 см.
Монтаж камеры эндоскопа внутри защитного бокса . Объективы камер монтировались внутри защитного бокса, созданного на базе аквабокса. Данный аквабокс удовлетворяет всем требованиям (за исключением предпоследнего), перечисленным в конце предыдущего пункта. Внешний вид аквабокса показан на рис. 6. Для защиты питающих кабелей от механических повреждений использовались сантехнические пластиковые трубы. На рис. 7 показан пример монтажа трех защитных боксов с камерами для одной из стоек бака смесителя.
Расстояние между камерой и прозрачной частью защитного бокса составляет 7–8 см. Данное расстояние найдено опытным путем с учетом получения четкой картинки и захвата всей площади прозрачной части защитного бокса камерой. Для фиксации камер внутри каркаса из полистирола вырезались уплотнительные цилиндры (рис. 8), диаметр которых незначительно превышал диаметр труб (рис. 7), на которых устанавливались защитные боксы. Для каждой камеры были изготовлены по два уплотнительных цилиндра с разными диаметрами. Высота меньшего цилиндра (для трубы с внутренним диаметром 30 мм) составляла 20 мм, а большего (для муфты с внутренним диаметром 50 мм) – 10 мм.

Рис. 6. Аквабокс для камер, послуживший основой Рис. 7. Пример монтажа трех камер в защитных для изготовления защитного бокса боксах для одной из стоек бака смесителя
В центре каждого уплотнительного цилиндра выполнялось отверстие, диаметр которого соответствовал диаметру камеры. Камера сначала продевалась в отверстие малого уплотнительного цилиндра (рис. 9, а ), цилиндр устанавливался в трубу с диаметром 30 мм. Далее камеру продевали через отверстие большого уплотнительного цилиндра, цилиндр устанавливался в муфту с диаметром отверстия 50 мм (рис. 9).
Vestnik of Omsk SAU, 2024, no.1 53)

Рис. 8 . Внешний вид цилиндров из полистирола

Рис. 9. Размещение камер в уплотнительных цилиндрах (а) и каркасе (б)
AGROENGINEERING

б
Выполнение отверстий в цилиндрах из полистирола в центральной части обеспечивает установку камеры в центре, что позволяет охватить объектив целиком без смещений. Перемещением камеры внутри цилиндров проводилась точная корректировка полноты охвата изображения с обеспечением большей резкости изображения смеси. Добивались, чтобы видеокамера охватывала всю площадь прозрачной части защитного бокса (рис. 10).

Рис. 10. Изображение с видеокамеры с полным охватом прозрачной части защитного бокса
Так как диаметры уплотнительных цилиндров несколько больше внутренних диаметров трубы и муфты, внутри создавалось плотное герметичное соединение, благодаря которому предотвращалось попадание пыли и влаги внутрь бокса камеры. Длина камеры составляет 50 мм, следовательно, совокупная длина цилиндров (30 мм) из полистирола обеспечивала достаточно прочную фиксацию камер в цилиндрах в заданном положении
Vestnik of Omsk SAU, 2024, no.1 53)
AGROENGINEERING
и предотвращала их смещение. Для герметизации боксов камер на муфтах по периметру их контакта был нанесен мягкий пластик из клеевого пистолета.
Монтаж системы видеорегистрации внутри бака смесителя. Для проверки работоспособности предлагаемой системы проводились эксперименты по регистрации состояния сыпучих веществ внутри бака смесителя для кормовых смесей. Для предотвращения перемещения защитных боксов относительно муфт от действия смешиваемых компонентов и вибраций боксы были прикреплены к муфте посредством саморезов (рис. 7, рис. 11).

Рис. 11. Фиксация защитных боксов видеокамер на каркасе

а б
Рис. 12 . Размещение кабелей от камер в каркасе из полипропиленовых труб: а ‒ в разобранном виде; б ‒ в собранном виде
После этого была осуществлена установка труб внутри вертикального шнекового смесителя. Кабели от эндоскопов были помещены в четыре каркаса из полипропиленовой трубы диаметром 50 мм. Основная вертикальная труба крепится вдоль шнека. От нее вдоль радиуса выполнены второстепенные трубы, на которых монтировались камеры.
Vestnik of Omsk SAU, 2024, no.1 53)
AGROENGINEERING
В местах крепления камер на выходах труб монтировались муфты с диаметром 50 мм
(рис. 12).
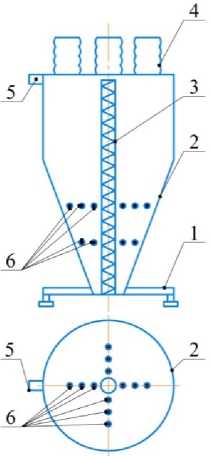
Рис. 13. Схема расположения видеокамер в смесителе:
1 ‒ рама; 2 ‒ корпус; 3 ‒ шнек; 4 ‒ фильтр;
5 ‒ патрубок для шланга дробилки; 6 ‒ видеокамеры
Так как смеситель к основанию сужается, то на самом нижнем ответвлении установлены две камеры, на верхних сечениях – по три. Таким образом, в нижнем сечении установлено суммарно восемь камер, на верхнем – двенадцать. Схема расположения камер внутри смесителя представлена на рис. 13.
Объективы камер, как и защитные боксы, в которых они расположены, направлены не вверх, а под углом 45° относительно вертикали (рис. 7). Это выполнено для того, чтобы смешиваемый материал соскальзывал с прозрачной части защитного бокса в процессе перемешивания, а не оставался на нем. После сборки каркасов и установки на них камер конструкция монтировалась внутри смесителя (рис. 14).

Рис. 14. Общий вид видеокамер внутри смесителя

Рис. 15. Вывод кабелей питания видеокамер из смесителя
Вывод кабелей питания видеокамер осуществлялся через верхнюю часть вертикального смесителя (рис. 15). Дальнейшее подключение кабелей от камер к ПЭВМ через коммутаторы описано в следующей части статьи.
Результаты исследований
Заведение всех кабелей от камер на единый компьютер с помощью коммутаторов . Реализуемый проект предусматривал закупку и монтаж 15 эндоскопов. Все они должны заводиться на единую ЭВМ. Для подобного подключения необходимо ис-
Vestnik of Omsk SAU, 2024, no.1 53)
AGROENGINEERING
пользовать активный коммутатор, который будет питать камеры через свои порты. Такая схема подключения позволяет отказаться от использования дополнительного источника питания для камер наблюдения. С учетом уровня потребляемого тока камер (0,3 А) были выбраны коммутаторы Orico AT2U3-13AB и TP-LINK UH700. Для их подключения на ЭВМ понадобилось два порта USB. Каждый порт указанных коммутаторов выдает ток больше 0,3 А, что достаточно для питания камеры наблюдения. Подключение кабелей, идущих от камер в смесителе, к коммутаторам показано на рис. 16. Слева изображен коммутатор Orico, справа – TP-LINK UH700.

а
Рис. 16. Активные коммутаторы для питания и соединения видеокамер смесителя с ЭВМ: а – коммутатор Orico; б – коммутатор TP-LINK UH700

б
Рабочее место оператора с ЭВМ, к которой подключены активные коммутаторы, показано на рис. 17.
Съем данных с камер осуществлялся с помощью специальной программы, установленной на ноутбук (рис. 18). В качестве ядра программы использовано приложение iSpy, позволяющее выводить данные с камер наблюдения на экран ЭВМ и сохранять эти данные на жесткий диск. Программа управления видеокамерами позволяет проводить съем данных как одновременно со всех установленных видеокамер, так и с отдельно выбранных (рис. 18). Перед проведением опытов видеокамеры были промаркированы (см. регуляторы яркости на левом изображении рис. 16) и соотнесены с видеоокнами, представленными на мониторе ноутбука (рис. 18). Это позволяет иметь представление о местоположении видеокамер внутри смесителя.
Отладка и проверка работоспособности программы фиксации изображений с эндоскопов проводилась на зерне пшеницы. Для этого смеситель наполнялся зерном до уровня, на котором все видеокамеры оказывались закрыты зерном.
После этого в ручном режиме проводилась настройка освещенности каждого бокса, в которых располагались видеокамеры. При этом важно было добиться необходимого баланса света, так как чрезмерная освещенность ухудшала получаемые изображения, уменьшая видимую площадь. С помощью встроенного на эндоскопе регулятора освещения изменялась степень освещенности бокса, что позволило обеспечить необходимое для дальнейшей обработки качество изображений.
Пример анализа изображений, полученных с помощью созданной системы видеорегистрации, представлен на рис. 19.
После монтажа системы видеонаблюдения и загрузки бака смесителя производилось перемешивание зерна и контрольных компонентов трех цветов – красного, зеленого и синего. Пример изображения такой смеси, полученного с помощью одного из эндоскопов предложенной системы, показан на рис. 10. Результат цветовой сегментации
Vestnik of Omsk SAU, 2024, no.1 53)
AGROENGINEERING
изображения показан на рис. 19. Сегментация проводилась на основе цветовой сегментации с использованием цветового пространства Lab [18]. Далее производился подсчет «красных», «зеленых» и «синих» пикселей. Данные значения делились на число пикселей информативной области изображения (число данных пикселей остается неизменным для каждой конкретной камеры), что позволило получить значения концентраций контрольных компонентов в конкретной точке бака смесителя. Под информативной частью понимается та часть изображения, из которой исключены засветки от кольцевого осветителя и область за пределами стекла защитного бокса. В дальнейшем данные по концентрациям в отдельных точках бака использовались для расчета коэффициента вариации смеси [1; 2], что позволило оценить качество ее перемешивания.

Рис. 17. Рабочее место оператора. Слева от ЭВМ размещены коммутаторы, к которым подключены камеры наблюдения

Рис. 18. Программа управления видеокамерами

а б в
Рис. 19 . Результат цветовой сегментации для красного (а), зеленого (б) и синего (в) компонентов смеси
Vestnik of Omsk SAU, 2024, no.1 53)
AGROENGINEERING
Заключение
Предложена не имеющая аналогов бюджетная распределенная система фото/ви-деорегистрации на базе бытовых USB-эндоскопов, предназначенная для научных исследований непрозрачных сыпучих сред. Указанные эндоскопы имеют камеру, обеспечивающую резкость изображения даже на малом расстоянии (7–8 см) от объекта съемки, но сохраняющие при этом малые аберрации (искажения) изображения. Кроме того, эндоскопы снабжены активным USB кабелем длиной до 20 метров, что позволяет монтировать камеру даже в баках с большими габаритами. Малые габариты камеры (не более 8 мм) и наличие встроенного кольцевого осветителя с регулируемым уровнем яркости существенно упрощают монтаж камер внутри защитных боксов малого размера при сохранении приемлемого качества изображения.
В статье сформулированы рекомендации по уменьшению площади засветок и бликов, вызванных отражением света осветителя от прозрачной части защитного бокса. Дешевизна бытовых USB-эндоскопов и активных USB-коммутаторов, предназначенных для подключения множества эндоскопов к единой электронно-вычислительной машине, и наличие бесплатной программы для фиксации изображений с множества камер позволили более чем на порядок сократить расходы на реализацию проекта. В статье подробно описана схема монтажа камер эндоскопов внутри защитных боксов, а также схема сопряжения защитных боксов и сантехнических пластиковых труб, обеспечивающих механическую защиту кабелей эндоскопа внутри бака с сыпучей смесью. Использование цилиндров из полистирола для фиксации камер в муфтах, сопряженных с защитными боксами, позволило отцентрировать камеру и обеспечить ее плотную фиксацию: эксперименты показали, что даже сильные вибрации не приводят к размытости изображения, так как камера эндоскопа сохраняет неподвижность относительно защитного бокса. В то же время камеры эндоскопов достаточно легко перемещаются вручную внутри цилиндров из полистирола, что позволило провести точную корректировку полноты охвата изображения с обеспечением большей резкости изображения сыпучего материала. С помощью созданной системы были получены качественные изображения смеси зерна и контрольных компонентов трех цветов (красного, зеленого и синего) в различных точках баках. На данных изображениях с помощью метода цветовой сегментации будут посчитаны площади (в пикселях) цветовых компонентов, что позволит определить коэффициент вариации, характеризующий качество перемешивания смеси.
Список литературы Разработка установки для определения однородности смешивания комбикорма методом цифровой обработки изображений
- Симачкова М.С. Обоснование структурнологической схемы смесителя кормов // Вестник НГИЭИ. 2020. № 8 (111). С. 5–15.
- Савиных П.А., Турубанов Н.В., Чернятьев Н.А. Экономическое и энергетическое обоснование разработки смесителя компонентов комбикормов // Вестник НГИЭИ. 2023. № 6 (145). С. 7–17.
- Гучева Н.В. Экспериментальные исследования процесса смешивания сыпучих зерновых материалов // Вестник Донского государственного технического университета. 2014. Т. 14. № 3(78). С. 172–177.
- Ландсберг Г.С. Оптика. М.: Физматлит, 2023. 852 с.
- Воробьев С.А., Мировицкая С.Д. Обзор средств автоматизированного проектирования интегрально-оптических элементов // Вестник Московского государственного открытого университета. Москва. Серия: Техника и технология. 2010. № 1. С. 64–72.
- Орлов С.Г., Поллер А.Б., Трушенко Д.Е. Обзор некоторых методов синтеза оптических волноводов с использованием нанотехнологий для информационных, сенсорных и вычислительных систем // Гео-Сибирь. 2007. Т. 4. № 1. С. 199–200.
- Соколов А.Л. Расчет поляризационных аберраций методом поляризационно-волновых матриц // Оптика и спектроскопия. 2007. Т. 103. № 4. С. 657–662.
- Демин О.В., Смолин Д.О. Определение качества смешивания сыпучих материалов // Сборник научных трудов SWorld. По материалам Международной научно-практической конференции «Научные исследования и их практическое применение. Современное состояние и пути развития 2011» / Науч.-исслед. проектно-конструкт. ин-т морфлота Украины [и др.]. Одесса, 2011. С. 73–74.
- Демин О.В., Смолин Д.О. Способ определения качества смеси компонентов, различающихся по цвету // Сборник научных трудов SWorld. Материалы Международной научно-практической конференции «Современные направления теоретических и прикладных исследований 2012» / Науч.-исслед. проектно-конструкт. ин-т морфлота Украины [и др.]. Одесса, 2012. С. 54–56.
- Королев Л.В., Таршис М.Ю. Метод оценки качества смешения сыпучих материалов по распределению частиц в плоском сечении рабочего объема // Изв. вузов. Химия и хим. технология. 2002. Т. 45. № 1. С. 98–100.
- Киричек К. Цифровые технологии в горнодобывающей промышленности и металлургии // Control Engineering Россия. 2022. № 1 (97). С. 50–53.
- Михеев П.А., Сущенко С.П. Анализ загрузки агрегирующего порта коммутатора ЛВС // Вестник Томского государственного университета. Управление, вычислительная техника и информатика. 2010. № 4(13). С. 106–115.
- Аладьев Ю.Ю., Романихин Р.Ю., Зиновьев Д.М., Востоков Н.Г. Анализ пропускной способности и реализация интерфейса удаленного управления параметрами ethernet-коммутатора на базе микросхем 5600вв3т // Вопросы радиоэлектроники. 2017. № 12. С. 97–104.
- Горбачев О. Витая пара: анализ маркировок // Первая миля. 2010. Т. 16. № 1. С. 32–35.
- Кукушкин А.В., Морозов А.Н. Оптическое устройство для пространственного восприятия двумерных данных экспериментально-численной визуализации // Ученые записки ЦАГИ. 2023. Т. 54. № 2. С. 56–66.
- Иванов О.В., Никитов С.А., Гуляев Ю.В. Оболочечные моды волоконных световодов, их свойства и применение // Успехи физических наук. 2006. Т. 176. № 2. С. 175–202.
- Рафаэл С. Гонсалес, Ричард Е. Вудс Цифровая обработка изображений. Москва: Техносфера, 2012. 1105 с.
- Ба Хала А.М.А. Об обнаружении пожаров на изображениях земной поверхности в цветовой модели LAB // Экономика. Информатика. 2021. Т. 48. № 4. С. 831–842.
