Регулирование угловой скорости шагового двигателя

Автор: Емельянов Р.Т., Аринчин С.А., Турышева Е.С., Макеич В.В.
Журнал: Вестник Красноярского государственного аграрного университета @vestnik-kgau
Рубрика: Технические науки
Статья в выпуске: 11, 2017 года.
Бесплатный доступ
Шаговые электродвигатели, применяемые в приводах машин и механизмов, работают в старт-стопном или непрерывном режиме, ко-гда управляющее воздействие регулирования угловой скорости задается последовательно-стью электрических импульсов. Регулирование угловой скорости по цепи якоря позволяет определить параметры переходных процессов работы шагового двигателя, а также полу-чить качественную картину фазового порт-рета, зависящего от вида исходной характе-ристики нелинейности системы. Это опреде-лило необходимость исследования процесса регулирования угловой скорости шагового дви-гателя по цепи якоря. Для исследования про-цесса регулирования угловой скорости шагово-го двигателя по цепи якоря выполнено мате-матическое моделирование в среде MATLAB* SIMULINK. Математическая модель процесса регулирования угловой скорости по цепи якоря содержит уравнения якорной цепи двигателя, движущего момента для вращательного дви-жения, а также приведенную массу манипуля-тора. В качестве допущений влиянием проти-во-ЭДС пренебрегаем, считая его незначи-тельным. Для настройки регулятора использо-вана операторная форма с обратной по произ-ведению передаточной функции прямой ветви и ветви обратной связи контура регулирова-ния. Результаты исследования показали, что форма колебаний угловой скорости отлична от синусоидальной, и их различие тем больше, чем больше амплитуда колебаний. В силу специфи-ки нелинейных свойств амплитуда колебаний привода растет быстрее, чем амплитуда то-ка. Так как в контуре тока присутствует воз-мущение, а его необходимо выполнить аста-тическим, следовательно, регулятор тока принимается типа пропорционально-интегра-льнодифференциального регулятора. Фазовый портрет исследуемой системы привода ма-нипулятора информации получен по двум ко-ординатам и составил: по оси X - 0,8 мм и оси Y - 2,0 мм. Исследования модели серводвига-теля показали, что эта система является устойчивой.
Регулятор тока, мате-матическая модель, шаговый двигатель, фа-зовый портрет, амплитуда колебаний, структурная схема, синтез, скорость, пере-даточная функция
Короткий адрес: https://sciup.org/140224164
IDR: 140224164 | УДК: 624.096/086:657.892
Regulation of angular velocity of the stepper motor
Stepper motors used in drives of machines and mechanisms, working in start-stop mode or contin-uous mode when control action is the regulation of angular velocity is specified by the sequence of electrical pulses. The regulation of angular velocity along the chain of the anchor allows one to define the parameters of transient operation of stepper motor and also to obtain qualitative picture of the phase portrait depending on the source character-istics of the nonlinearity of the system. The need to study the process of regulating the angular velocity of the stepper motor by varying armature circuit has been identified. To study the process of regu-lating angular velocity of stepper motor by varying armature circuit mathematical modeling in the en-vironment of MATLAB SIMULINK. Mathematical model of the process of regulation of angular ve-locity at anchor chain contains the equation of an-chor chain of the engine, driving torque for rota-tional motion and the weight of the manipulator. As assumptions the influence of back-EMF is neglect-ed, considering it to be insignificant. To configure the controller used in operator form with the in-verse of the product of transfer functions in direct branch and branch feedback loop. As in current loop there is disturbance, and it must be astatic, therefore, the current controller must be propor-tional-integral. The results showed that the shape of the oscillation angular velocity was different from sinusoidal and the difference between them was greater, depending on the amplitude of the oscillations. Due to the nature of nonlinear proper-ties of the amplitude of the drive increases faster than the amplitude of the current. As in current loop there is outrage, and it must be astatic, there-fore, the current controller was adopted, the type of proportional-integral-differential controller. Phase portrait of investigated drive system of the manipulator of the information obtained by two coordinates and to X - axis is 0.8 mm and the Y - axis is 2.0 mm. Research model of serving motor showed that the system was sustainable.
Текст научной статьи Регулирование угловой скорости шагового двигателя
Введение. Шаговые электродвигатели применяются в приводах машин и механизмов, работающих в старт-стопном режиме или в приводах непрерывного движения, где управляющее воздействие задается последовательностью электрических импульсов, например, в манипуляторах. В отличие от сервоприводов шаговые приводы позволяют получать точное позиционирование без использования обратной связи от датчиков углового положения. Регулирование угловой скорости шагового двигателя по цепи якоря позволяет определить параметры переходных процессов работы шагового двигателя, а также получить качественную картину фазового портрета, зависящего от вида исходной характеристики нелинейности системы.
Цель исследования: изучение процесса регулирования угловой скорости шагового двигателя по цепи якоря.
Объект, методы и результаты исследования . Объектом исследований выбран шаговый двигатель манипулятора (рис. 1).
Гибридный двигатель объединяет преимущества первых двух типов двигателей: малый шаг поворота и большой момент. Это двигатель с постоянными магнитами, но с большим количеством полюсов. Количество шагов на оборот пропорционально количеству фаз статора и количеству полюсов (зубцов) ротора. Наиболее распространены шаговые двигатели с числом шагов на оборот от 100 до 500 (3,6– 0,72° на один шаг) [1].
Для исследования динамики шагового двигателя выполнено математическое моделирование процесса регулирования угловой скорости по цепи якоря двигателя в MATLAB*SIMULINK.
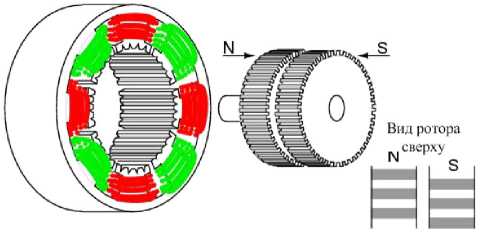
Рис. 1. Конструкция гибридного двигателя
Математическая модель процесса регулирования угловой скорости по цепи якоря приведена в виде уравнений якорной цепи двигателя, движущего момента для вращательного движения, а также приведенную массу [2].
di
U=R^ + L -- -z aLsi , s dt p s q di
-— - z p a Ls iq + zP a^o , s dt
d
sd
U = Rsid + L qs
T da
I— = M - Mr, dt c ,
M =2 z p ^ o i q ,
M с = Rm Иа 1 + f ( mXg + 2 mg^
2( 1 1+ 1^ )
m = тл +2 m ~ +--1 дв , пр 1 2 R 2
валу двигателя; R – радиус колес; m 1 – масса тележки; m 2 – масса колес; a – ускорение.
В качестве допущения принято: влияние про-тиво-ЭДС незначительно. Для настройки регулятора использована операторная форма с обратной по произведению передаточной функции прямой ветви и ветви обратной связи контура регулирования. Инерционность преобразователя невозможно скомпенсировать, поэтому она исключена из синтеза.
Перейдя в операторную форму записи, передаточные функции для контура тока выглядят так:
W nP ( p ) =
K 1/ R я
-------------------------------------.-----------------------------------
(T mn ■ P + 1) (Т я ■ P + 1)
W oc ( P ) = K dm ■
где U d – напряжение двигателя; R s – сопротивление двигателя; id – сила тока двигателя; L – индуктивность обмотки возбуждения; z – приведенное сопротивление; i – сила тока якоря; Uq - напряжение якоря; a - угловая скорость; p0 - угол сдвига фаз; M - нагрузочный момент; Mc – момент сопротивления; m пр – приведенная масса манипулятора; f – коэффициент трения качения колес; I 1 – момент инерции колеса относительно его оси; I дв – момент инерции двигателя; М с – требуемый момент на
Так как в контуре тока присутствует возмущение, то регулятор тока принят ПИ типа. Умножив полученную передаточную функцию на интегратор с постоянной времени T т , получим искомую передаточную функцию:
W pt ( P ) =
(Т я ■ p + 1) ■ R я ,
К S m ■ K mn • T m ' P ’
Передаточная функция всего контура тока:
W KPT ( p )
1/ К d m
TmnTm ■ p2 + T m ■ p + 1’
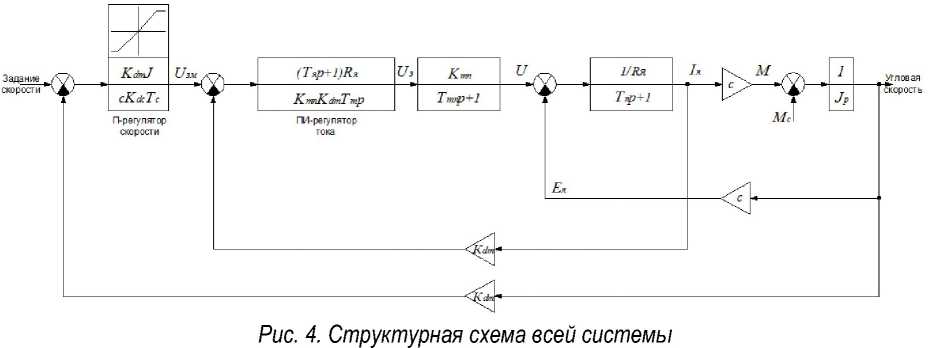
Аналогично выполняется настройка контура регулирования скорости. В итоге получаем передаточную функцию регулятора скорости и структурную схему всей системы целиком [4]:
W PC ( p ) = ^m^ ;
c ⋅ К ∂ cTc
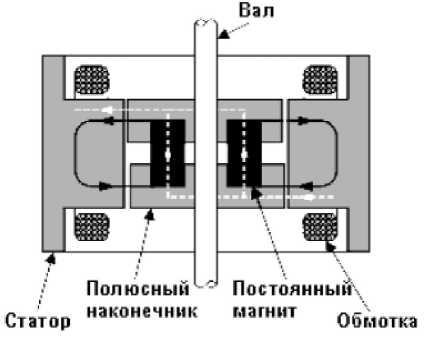
Структурная схема контура регулирования тока приведена на рисунке 2.
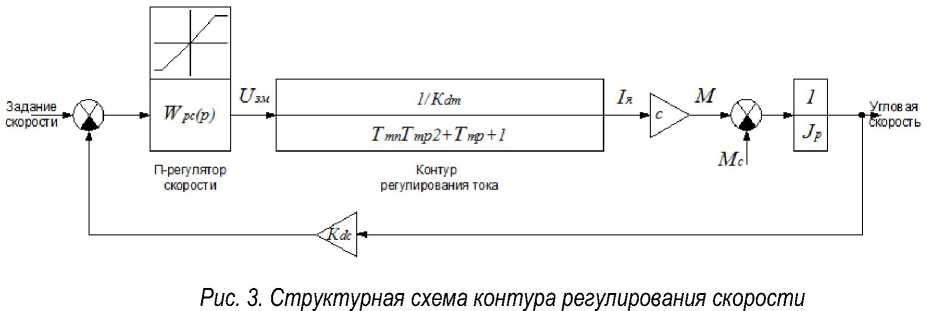
Структурная схема контура регулирования скорости приведена на рисунке 3.
На рисунке 4 приведена структурная схема всей системы.
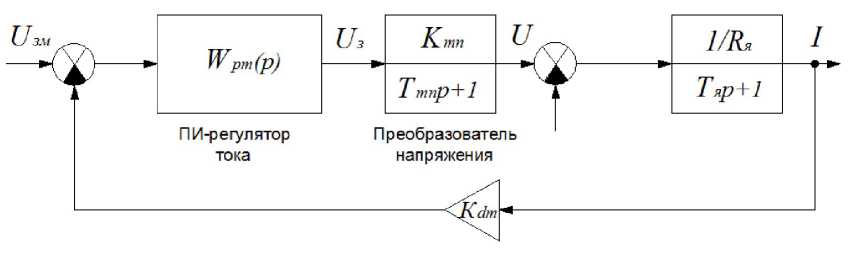
Рис. 2. Структурная схема контура регулирования тока
Реализация математической модели приведена на рисунке 5. Переходные процессы работы шагового двигателя носят колебательный характер.Форма колебаний отлична от синусоидальной, и их различие тем больше, чем больше амплитуда колебаний. В силу специфики нелинейных свойств амплитуда колебаний привода растет быстрее, чем амплитуда тока. Так как в контуре тока присутствует возмущение, а его необходимо выполнить астатическим, следовательно, регулятор тока принимается типа ПИД регулятора.
Для построения фазового портрета для модели серводвигателя использовался узел дифференцирования (du/dt) и узел отображения информации по двум координатам (XY Graph) [5].
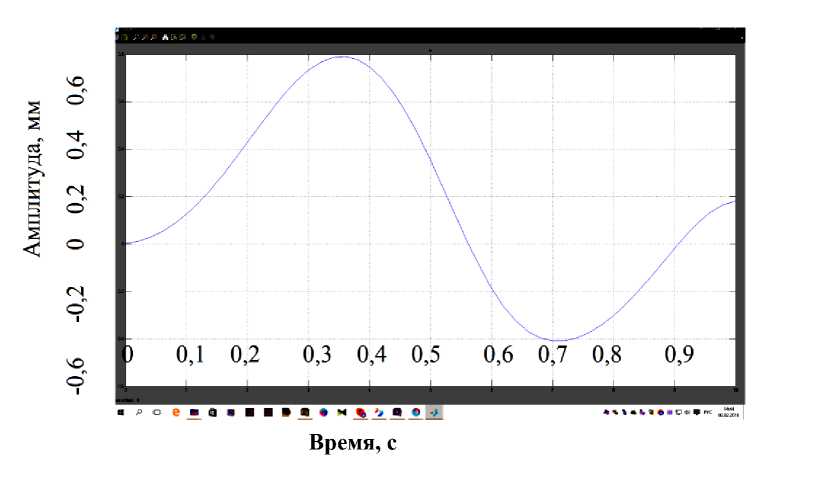
Время, с
0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9
Рис. 5. Переходные процессы работы серводвигателя
Качественная картина фазового пространства исследуемой системы привода манипулятора определяется корнями λ характеристического уравнения. На рисунке 6 приведен полученный узел отображения информации по двум координатам в виде фазового портрета привода
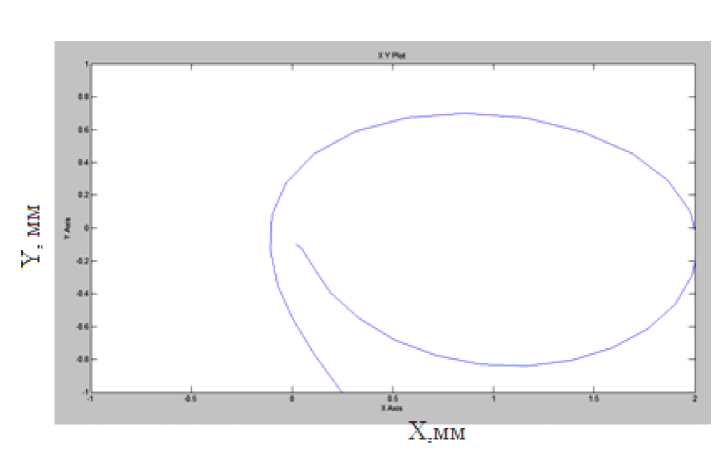
Рис. 6. Узел отображения информации по двум координатам
Заключение:
– математическая модель шагового двигателя позволяет моделировать переходные процессы, связанные с изменением угловой скорости шагового двигателя по цепи якоря;
с шаговыми двигателями. Отображения информации по двум координатам составили: по оси X – 0,8 мм и оси Y – 2,0 мм. Исследования модели серводвигателя показали, что эта система является устойчивой.
– результаты моделирования динамических процессов шагового двигателя установили качественную картину фазового портрета привода манипулятора и степень устойчивости системы по критерию Найквиста.
Список литературы Регулирование угловой скорости шагового двигателя
- Емельянов Р.Т. и др. Моделирование динамики регулируемого гидромотора//Вестн. КрасГАУ. -2014. -№ 8. -С. 181-185.
- Емельянов Р.Т. и др. Управление шаговым двигателем//Вестн. КрасГАУ. -2016. -№ 8. -С. 181-185.
- Скурихин Л.В. Выбор шагового двигателя для дорожного принтера//Молодежь и наука: проспект Свободный: междунар. науч. конф. студентов, аспирантов и молодых ученых . -URL: http://conf.sfu-kras.ru/mn2015/?q=направления-и-секции/строительство-формирование-среды-для-жизни-механизация-и-автоматизация.
- Патент на полезную модель №.153211. Дорожный принтер/Р.Т. Емельянов, А.С. Климов, А.В. Закурдаев, Л.В. Скурихин, О.Л. Климова, Е.С. Турышева; опубл. 10.06.2015, Бюл. № 19.
- Prokopiev A.P., Prokopiev A.P., Ivanchura V.I., Emelianov R.Т. The analytical solution and the dynamic charac-terristics of the system model velocity control vibrating roller//Journal of Si-berian Federal University. Engineering & Technologies 4 (2014, 7). -Р. 482-490.
