Рекурсивная фильтрация данных в системе синхронизации приемника-компаратора сигналов ГЛОНАСС/GPS

Автор: Акулов В.В., Пихтелев А.И.
Журнал: Физика волновых процессов и радиотехнические системы @journal-pwp
Статья в выпуске: 4 т.20, 2017 года.
Бесплатный доступ
Проведен анализ работы системы синхронизации приемника-компаратора сигналов ГЛОНАСС/GPS с рекурсивной фильтрацией данных о расхождении эталонной и формируемой шкал времени.
Приемник-компаратор, система синхронизации, сигналы глонасс/gps, рекурсивная фильтрация
Короткий адрес: https://sciup.org/140256025
IDR: 140256025
The recurrent filtering of dates in a synchronization system of the receiver-comparator of GLONASS/GPS signals
The analysis of the working of the synchronization system of the receiver-comparator of GLONASS/GPS signals with recurrent filtering of dates about a divergence of a reference and forming time scales was taken.
Текст научной статьи Рекурсивная фильтрация данных в системе синхронизации приемника-компаратора сигналов ГЛОНАСС/GPS
Приемники-компараторы сигналов спутниковых радионавигационных систем (СРНС) ГЛО-НАСС/GPS использую т ся для измерения относительной погрешности по частоте и синхронизации частоты и шкалы времени (ШВ) удаленных высокоточных стандартов частоты и времени (СЧВ).
Система синхронизации (СС) приемника-компаратора определяет его точностные характеристики в основных режимах работы: синхронизация частоты и ШВ внутреннего опорного генератора (ОГ) с частотой и ШВ Госэталона (UTC) по сигналам СРНС; определение относительной погрешности по частоте высокостабильного ОГ.
-
1. Постановка задачи
В основе принципа действия прибора лежит фазово-временной метод (ФВМ) определения относительной погрешности по частоте внутреннего или внешнего высокостабильного ОГ - измерение приращения (набега) разности фаз во временной области сигналов местной ШВ, формируемой из частоты встроенного или внешнего ОГ, и сигналов эталонных меток времени 1 Гц, формируемых по результатам приема и обработки сигналов СРНС ГЛОНАСС/GPS, и автоматической синхронизации по данным сравнения частоты и ШВ местного (встроенного рубидиевого или внешнего) генератора по эталонному сигналу.
Данные об отстройке частоты, полученные ФВМ за интервалы времени между коррекциями частоты, являются исходными для СС частоты подстраиваемого ОГ, а также служат для расчета величины временной коррекции ШВ приемника-компаратора по тому или иному алгоритму работы.
В [1; 2] были рассмотрены различные алгоритмы работы СС приемника-компаратора. В разработанной АО «ФНПЦ «ННИПИ «Кварц» имени А.П. Горшкова» модификации приемника-компаратора ЧК7-56 реализован алгоритм, по которому величина очередной временной коррекции основной ШВ приемника-компаратора за время измерения Тизм . определяется с учетом тренда измеряемого в приборе расхождения между формируемой ШВ приемника-компаратора и ШВ СРНС.
На практике выдаваемая ЧК7-56 ШВ после обработки, хотя и укладывается в гарантируемые пределы отклонения от ШВ UTC ± 50 нс, но имеет достаточно большие сдвиги, обусловленные прежде всего как сдвигами ШВ с радионавигационного приемоизмерительного (РНПИ) модуля за счет, например, смены видимой группировки навигационных космических аппаратов, так и сдвигами самой системной ШВ СРНС.
Целью данной работы является исследование возможности рекурсивной фильтрации экспериментальных данных о расхождении эталонной ШВ и ШВ приемника-компаратора, вывод и анализ выражений для оценки ее эффективности по СКО в зависимости от выбираемого параметра рекурсивного фильтра.
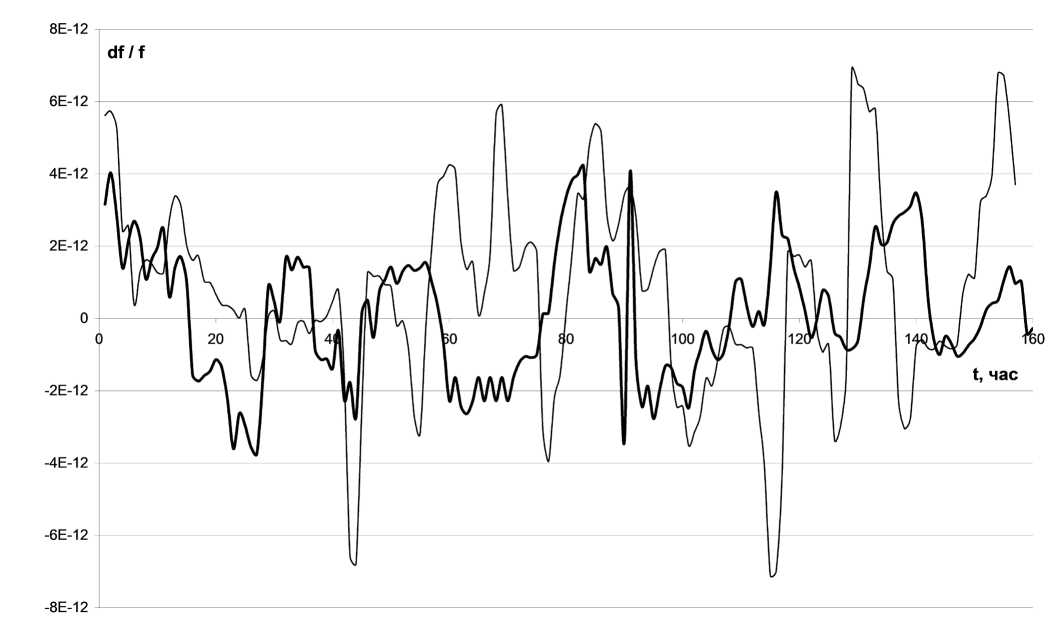
Рис. 1. График зависимости текущих данных о расхождении эталонной ШВ, приведенной к ШВ UTC(SU), и ШВ приемника-компаратора в относительных отстройках по частоте, измеренных за 1 ч, без использования алгоритма рекурсивной
–12
фильтрации (тонкая линия) и с использованием алгоритма рекурсивной фильтрации (толстая линия) при СКО ж = 2,76 • 10 ;
к = 0,3; СКО„ = 1,82 • 10 12 ; СКО„ = 1,84 • 10 12
у y теор .
-
•50 J---------------------------------------------------------------------------------------------------------------------------
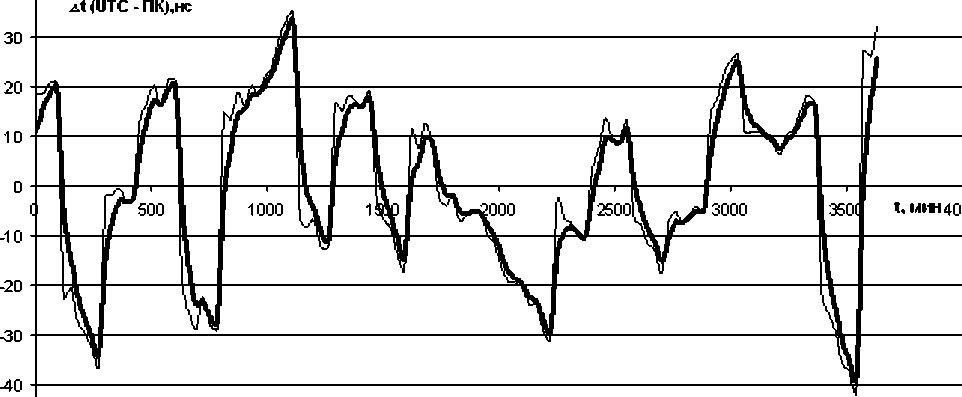
- Рис. 2. График зависимости исходных (тонкая линия) и рекурсивно-усредненных (толстая линия) текущих данных о расхождении эталонной ШВ, приведенной к ШВ UTC(SU), и ШВ приемника-компаратора при СКОх = 18,4 нс; к = 0,4; СКО„ = 16 нс; СКО„ = 11 нс 2. Анализ алгоритма и оценка погрешности синхронизации
у y теор .
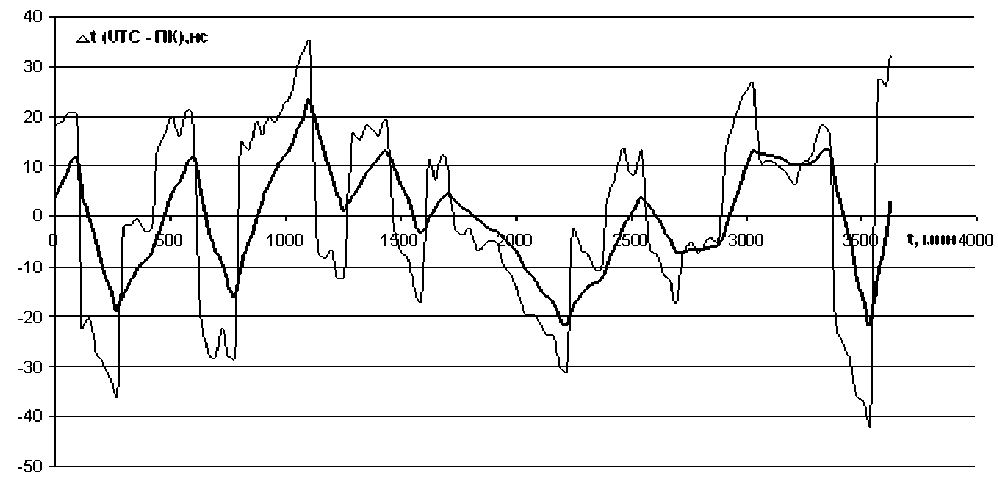
Рис. 3. График зависимости исходных (тонкая линия) и рекурсивно-усредненных (толстая линия) текущих данных о расхождении эталонной ШВ, приведенной к ШВ UTC(SU), и ШВ приемника-компаратора при СКО х = 18,4 нс; к = 0,8; СКО у = 10 нс
2 22 2 2
о,, + к о = (1 - к) о-р yn yn-1 xn
Фильтрация экспериментальных данных осуществлялась по рекурсивному выражению:
где о = СКО ; о = СКО . ynynxnxn
Считая далее, что при больших значениях n
о = о = о , а о = о , из (4) следует: y n y n - 1 y , x n x ,
У п = кУ п - 1 + ( 1 - к ) x n
где y n - усредненное значение текущих данных о расхождении эталонной ШВ и ШВ приемника-компаратора; x n - текущее значение данных о расхождении эталонной ШВ и ШВ приемника-компаратора; к - параметр рекурсивного фильтра, 0 < к < 1.
Известно [3], что такой фильтр эквивалентен RC-фильтру с коэффициентом передачи
о У
( 1 - к ) 2 2 1 + к 2 ° x
- T к = e т ,
где Т — период дискретизации, с; т — постоянная фильтра, с.
Из (2) следует, что
T
т = - .
ln k
Предполагая, что каждое значение yn при большом значении n и малых значениях k яв-
Очевидно, что выражением (5) можно пользоваться только при малых значениях k , так как при больших k существенное значение имеет взаимозависимость случайных величин в формуле (1), что приводит к необходимости вычисления ковариаций указанных величин. Последнее на практике не всегда возможно, так как требует знания совместных распределений вероятностей.
После обработки экспериментальных данных по выражению (1), изменяя параметр k по минимуму СКО обработанных данных, можно выбрать его наиболее приемлемое значение, а из выражений (2) и (3) - оптимальное соотношение Т и т .
ляется почти независимым от предыдущего значения y n - 1 , а в большей степени зависит от значения хn , которое, в свою очередь, является независимым от значения хn –1, что определяется взаимонезависимостью положений метки времени с РНПИ модуля сигналов СРНС в каждую секунду, и применяя оператор вычисления дисперсии к выражению (1) получим:
3. Результаты обработки экспериментальных данных
На рис. 1–4 представлены результаты обработки экспериментальных данных при различных значениях k и соответствующих значениях СКО.
Как видно из графиков, вычисленные значения СКО уменьшаются с возрастанием к ( к < 1,
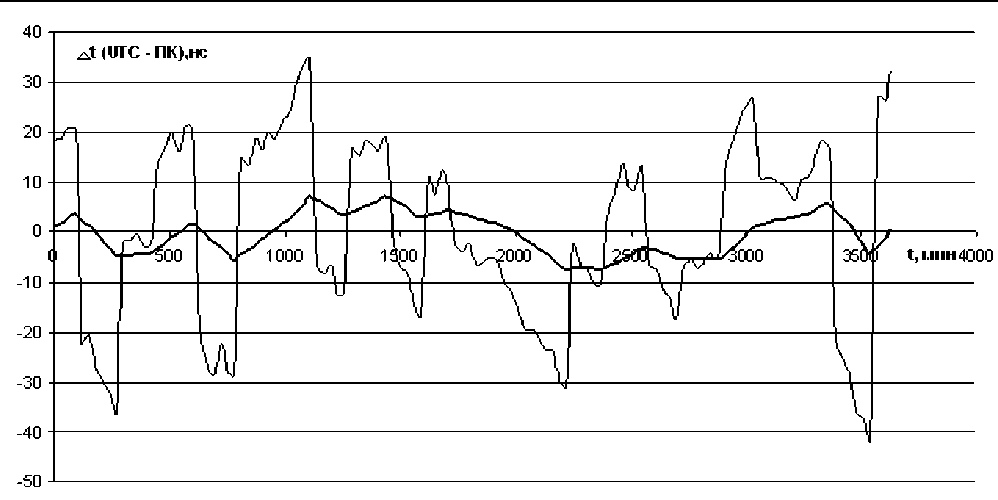
Рис. 4. График зависимости исходных (тонкая линия) и рекурсивно-усредненных (толстая линия) текущих данных о расхождении эталонной ШВ, приведенной к ШВ UTC(SU), и ШВ приемника-компаратора при СКО х = 18,4 нс; к = 0,95; СКО у = 4,1 нс
рис. 3), но при этом из практических соображений, согласно (2), т не должно быть очень большим, а должно составлять 1–3 суток.
Результаты работы позволяют не только на практике использовать полученные после обработки усредненные экспериментальные данные, как более точные, для оценки качества изготавливаемых приемников-компараторов, но позволяют улучшить параметры выдаваемой приемником-компаратором ШВ, если использовать указанный рекурсивный алгоритм в системе синхронизации приемника-компаратора при выдаче данных на коррекцию ШВ и частоты.
Заключение
Проведен анализ работы алгоритма синхронизации ШВ разработанного в АО «ФНПЦ «ННИ-ПИ «Кварц» имени А.П. Горшкова» приемника-компаратора сигналов СРНС ГЛОНАСС/GPS с эталонной ШВ, приведенной к ШВ UTC(SU) с использованием рекурсивной фильтрации данных об их расхождении. Получена оценка погрешности синхронизации ШВ с учетом рекурсивного усреднения. Получены соответствующие реализациям значения СКО и даны рекомендации по оптимальному выбору параметров указанного алгоритма.
Список литературы Рекурсивная фильтрация данных в системе синхронизации приемника-компаратора сигналов ГЛОНАСС/GPS
- Приемник-компаратор сигналов ГЛОНАСС/GPS для автоматизированных систем поверки высокостабильных генераторов / В.В. Акулов [и др.] // Информационно-измерительные и управляющие системы. 2005. Т. 3. № 6. С. 21-26.
- Алгоритмическое обеспечение системы синхронизации шкалы времени приемника-компаратора сигналов ГЛОНАСС/GPS / В.В. Акулов [и др.] // Труды XIII Международной научно-технической конференции RLNC-2007. Воронеж, 2007. Т. 3. С. 1904-1909.
- Бокс Дж., Дженкинс Г. Анализ временных рядов // Прогноз и управление. Вып. 1. М.: Мир, 1974.
