Решение проблем достоверности реализации производственного участка в VR-тренажёре

Автор: Кузнецов А.В., Костырев К.М., Алексеев А.С., Клименко К.В.
Журнал: Технико-технологические проблемы сервиса @ttps
Рубрика: Организационно-экономические аспекты сервиса
Статья в выпуске: 1 (71), 2025 года.
Бесплатный доступ
Внедрение VR-технологий сталкивается с определёнными сложностями, такими как необходимость создания универсальных тренажёров, учитывающих уникальные характеристики каждого производства. Ограничения в графике и физике, а также трудности в точной визуализации реальных процессов могут привести к недостаточному пониманию обучаемыми условий работы. При этом не меньшее значение имеет и правильное проектирование сценария и концепции тренажёра, механик взаимодействия с виртуальной средой. Примером успешного применения VR-тренажёра является проект, разработанный для учебного центра ООО «Газпром трансгаз Томск» для организации подготовки специалистов по обслуживанию газоперекачивающих агрегатов. Тренажёр включает интерактивные модули, позволяющие отрабатывать навыки в безопасной среде, а также эффективно оценивать результаты работы обучающихся специалистов. В статье рассмотрены использованные приёмы проектирования и механики взаимодействия с виртуальной средой.
Виртуальная среда, компьютерный тренажёр, механика взаимодействия, речевой ввод, подготовка кадров, нефтегазовое дело
Короткий адрес: https://sciup.org/148331291
IDR: 148331291 | УДК: 004.946
Solving problems of reliability of the implementation of the production site in the VR simulator
The introduction of VR technologies faces certain difficulties, such as the need to create universal simulators that take into account the unique features of each production. Limitations in graphics and physics, as well as difficulties in accurately visualizing real-world processes, can lead to a lack of understanding of working conditions by trainees. At the same time, the correct design of the simulator scenario and concept, as well as the mechanics of interacting with the virtual environment, is equally important. An example of successful application of a VR simulator is a project developed for the Gazprom Transgaz Tomsk LLC training center for the organization of training specialists in the maintenance of gas pumping units. The simulator includes interactive modules that allow you to practice skills in a safe environment, as well as effectively evaluate the results of the work of trained specialists. The article discusses the design techniques used and the mechanics of interacting with a virtual environment.
Текст научной статьи Решение проблем достоверности реализации производственного участка в VR-тренажёре
Использование тренажёров с виртуальной реальностью (VR) в профессиональной подготовке специалистов становится всё более важным инструментом в современном образовательном процессе. Эти технологии обеспечивают более глубокое погружение, создавая условия, которые кажутся приближенными к действительности.
Несомненно, это помогает специалистам лучше адаптироваться к реальным производственным процессам. Погружение в виртуальную среду способствует более глубокому пониманию задач и процессов, так как обучаемый может взаимодействовать с объектами и оборудованием, почти также, как и в реальной жизни.
EDN MCUTKC
Учитывая, что работа на производстве часто связана с рисками, особенно для новичков, особенно важно, что VR-тренажёры позволяют отрабатывать навыки без угрозы для здоровья и безопасности оборудования. Ошибки в виртуальной среде не приводят к реальным негативным последствиям, но, в то же время, позволяют оценить риски их наступления, что делает обучение более комфортным и эффективным.
Использование реального оборудования и материалов для обучения может оказаться довольно дорогостоящим, и в этом случае, именно виртуальные инструменты позволят сократить затраты на обучение. Кроме того, виртуальные сценарии можно легко масштабировать и адаптировать под разные задачи, многократно повторять сложные сценарии, что способствует лучшему запоминанию и отработке навыков. Если говорить об интересе обучающихся к технологии в целом, можно заключить, что интерактивность и вовлечённость в процесс обучения повышают мотивацию и интерес к изучению профессиональных навыков будущих специалистов.
Однако, существуют определённые сложности и проблемы на пути применения VR-технологий. Каждое производство уникально, и создание универсальных VR-тренажёров может оказаться достаточно сложной задачей. Необходимо учитывать множество факторов, таких как характеристики оборудования, особенности протекания технологических процессов и даже человеческий фактор. Кроме того, даже самые современные VR-технологии всё ещё имеют ограничения в плане графики, физики и взаимодействия с объектами.
Не менее серьёзна и проблема проектирования и визуализации сценариев работы на производственном участке. Не всегда удаётся достаточно точно воссоздать все нюансы реального производственного процесса в виртуальной среде. Это может привести к тому, что специалисты не получат полного представления о реальных условиях работы или приобретут недействительный опыт, который, в свою очередь может привести к опасным инцидентам.
Попробуем представить какие активности или инструменты могут потребоваться для реализации тренажёра, обеспечивающего подготовку специалистов к работе на реальном производственном участке. При разработке виртуального тренажёра, так как мы в любом случае не в состоянии абсолютно точно повторить механику и ощущения, имеющиеся в действительности, мы будем вынуждены прибегать к неким условностям. Реализация тех или иных механик будет варьироваться в зависимости от приоритетной задачи и возможностей виртуальных технологий.
Например, мы понимаем, что обучающийся должен каким-то образом получить информацию о той задаче, которую ему необходимо выполнить. В реальности такую информацию может предоставить непосредственный руководитель или коллега. С ней также можно ознакомиться, изучая регламентирующую документацию. Каким образом подобную активность можно было бы реализовать в виртуальных инструментах? Самым простым вариантом было бы текстовое описание задания. Его можно отображать на элементах интерфейса или с помощью виртуальных приспособлений, таких как журналы или экран электронных планшетов или ПК.
Сложнее было бы реализовать естественное общение с виртуальными руководителями или коллегами. Во-первых, это потребует, как минимум создать такую виртуальную модель человека и сделать для неё реалистичные анимации движений тела и мимики лица. Именно неестественность человеческих движений и эмоций будет наиболее заметной. Во-вторых, не менее сложная задача обеспечить удобный и функциональный интерфейс для ведения диалога с таким виртуальным персонажем [1]. Но, в то же время, именно такой сценарий взаимодействия будет наиболее реалистичным.
В таблице 1 перечислены возможные механики получения заданий пользователем виртуального тренажёра. Механики сгруппированы по категориям и для них даны краткие пояснения.
Реальные задачи, выполняемые работниками, не всегда локализуются на небольшом ограниченном участке территории. Необходимо перемещаться между производственными помещениями, доставлять оборудование к месту работы и т.п. В общем, требуется перемещаться на определённые и не всегда короткие расстояния. При этом такое перемещение может занимать определённое время, которое на первый взгляд не имеет никакой учебной ценности. Конечно, в виртуальной реальности есть способы сократить такие временные затраты, например используя технику телепортирования (мгновенного перемещения к заданной позиции). Однако, здесь стоит задуматься, не будет ли такое упрощение тем самым фактором, который заставит обучающегося приобрести ложное представление о времени, необходим для выполнения работ.
Кроме того, не менее важно контролировать не только сам факт, но и процесс перемещение по площадке. Могут существовать ограничения для нахождения человека в рабочей зоне во время работы оборудования, запрет на перемещение по коммуникациям и трубопроводному оборудованию, перемещения бегом или прыжки с высоты и т.п. Подобные действия в реальности могут привести к травмированию или повреждению оборудования или коммуникаций. Таким образом, исключив факт перемещения по локации, мы исключим и возможность освоить такой необходимый навык как соблюдение техники безопасности.
Таблица 1 – Механики получения задания в виртуальном тренажёре
|
Категория |
Тип |
Комментарий |
|
1. Интерактивные интерфейсы |
A. Виртуальные панели и экраны |
Указания или описание задания появляются на интерактивных дисплеях или панелях управления внутри виртуальной среды |
|
B. Меню на запястье/в воздухе |
Пользователь активирует интерфейс на руке или перед собой, чтобы выбрать и ознакомиться с заданием |
|
|
2. Физические носители заданий |
C. Виртуальные документы |
Задание передаётся через «бумажные» документы, плакаты или иные виртуальные объекты (например, чек-лист для проверки оборудования) |
|
D. AR-подсказки |
Информация о задании проецируется на реальные объекты через смешанную реальность |
|
|
3. Контекстные подсказки в среде |
E. Подсветка объектов |
Важные элементы (кнопки, рычаги, инструменты) подсвечиваются, тем самым указывая цель |
|
F. Динамические метки |
Текстовые или графические метки появляются рядом с объектами, с которыми необходимо провести те или иные действия |
|
|
4. Голосовые инструкции |
G. Инструктор-аватар |
Виртуальный персонаж (начальник, коллега) ставит задачу, имитируя живое общение |
|
H. Голосовой помощник |
Виртуальный собеседник (AI-система, рация) озвучивает цели и подсказки |
|
|
5. Сценарные события |
I. Экстренные ситуации |
Задание генерируется автоматически, например при инициации аварии (пожар, утечка газа и т.п.) |
|
J. Квестовая логика |
Последовательные указания формируются при взаимодействии с окружением |
|
|
6. Адаптивные системы |
K. Динамические задания |
Алгоритмы меняют сложность и тип заданий, анализируя ошибки или успехи пользователя |
|
L. Ситуативное обучение |
Система предлагает задания, соответствующие текущему контексту (например, если пользователь взял инструмент, появляется подсказка по его использованию) |
|
|
7. Мультиплеерные механики |
M. Кооперативные задания |
Задачи ставятся отдельным участникам или всей команде через голосовой/текстовый чат или специальный интерфейс |
|
N. Ролевое распределение |
Участники получают разные задачи в зависимости от роли (оператор, руководитель, техник) |
Традиционно одна из самых сложных для реализации в VR-тренажёрах – взаимодействие с объектами и оборудованием. Пользователь также как и в реальности должен иметь возможность брать предметы, двигать их или переключать (изменять их состояние). Вопрос, как именно это можно реализовать? Вероятно, придётся использовать кнопки на контроллерах и отслеживание жестов рук [3]. Но этого может оказаться недостаточно. Механика захвата объектов тоже должна быть реализована, и сделать это можно по-разному, например, дистанционно, когда объект можно взять на расстоянии, или только при касании и т.п. После непосредственно захвата объекта с ним могут и должны происходить какие-то манипуляции: вращение, перемещение или даже масштабирование, если это необходимо. Хорошим дополнением была бы и обратная связь через вибрацию контроллеров, чтобы ощутить контакт, а также звуковая или световая сигнализация. Ещё один немаловажный аспект взаимодействия – это способ ввода данных обучающимся. Каким образом он сообщает о результатах работы, выполненных измерениях или обнаружении тех или иных неисправностей или отклонений. Это могут быть отметки в «бумажном» или электронном чек-ли-сте, внесение числовых данных с помощью виртуальной клавиатуры или что-то подобное. Один из наиболее реалистичных сценариев – голосовые сообщения, воспринимаемые виртуальным собеседником. Связь с ним может осуществляться посредством рации или прямого общения.
То есть при разработке необходимо решить вопросы именно тех активностей, которые имеют место в реальности. И наиболее подходящей была бы реализация механики достаточно близко повторяющую реальную механику [2]. В таблице 2 даны возможные механики для реализации взаимодействия с виртуальными объектами. Механики сгруппированы по категориям и для них даны краткие пояснения.
И, наконец, тренажёр не был бы тренажёром, если бы учащийся не имел возможности оценить результаты своей работы, ознакомиться и проанализировать ошибочные действия и выполнить ряд попыток улучшить свои показатели. Для этого, как минимум, необходимо проинформировать о детальном ходе работу обучающегося, указать позиции, где требуется внимание и приложение дополнительных усилий. Полезным было бы получить общую оценку результативности и индивидуальные оценки для составляющих всего перечня действий (или отдельных модулей, если таковые имеются).
Давайте рассмотрим, каким образом подобные механики могут быть применены на практике. В период с 2023 по 2024 гг. Отдел цифровых образовательных ресурсов Томского политехнического университета выполнил разработку виртуального тренажёра «ГПА-32 «Ладога» Проверка готовности к пуску» для учебных задач университета и ООО «Газпром трансгаз Томск». Тренажёр предназначен для профессиональной подготовки и повышения квалификации специалистов, обучающихся по образовательным программам, в состав которых входит раздел «Устройство функционирование и обслуживание ГПА-32 «Ладога».
Таблица 2 – Механики взаимодействия с виртуальными объектами
|
Категория |
Опция |
Комментарий |
|
I. Захват и манипуляция объектами |
A. Физический захват |
Использование контроллеров или отслеживания рук для “хватания” объектов (кнопка/триггер). |
|
B. Дистанционный захват |
Захват объектов на расстоянии с помощью лучей или магнитных эффектов. |
|
|
C. Двуручное взаимодействие |
Совместное использование обеих рук (удержание ящика одной рукой, открытие другой). |
|
|
II. Инструменты и использование предметов |
D. Активация инструментов |
Нажатие триггера для использования оружия, кисти или молотка |
|
E. Сложные механизмы |
Взаимодействие с рычагами, кнопками или панелями |
|
|
III. Перемещение и навигация |
F. Телепортация |
Указание точки перемещения лучом (используется для комфортного передвижения). |
|
G. Физическое движение |
Ходьба в пределах игровой зоны или использование джойстика контроллера. |
|
|
H. Перенос объектов |
Перетаскивание предметов через среду |
|
|
IV. Интерфейсы и меню |
I. Плавающие меню |
Активация интерфейса на запястье или в воздухе |
|
J. Взаимодействие через взгляд |
Выбор опций фиксацией взгляда |
|
|
K. Голосовые команды |
Управление через голос |
|
|
V. Физика и реализм |
L. Реалистичная физика |
Объекты падают, сталкиваются и разбиваются |
|
M. Деформация и разрушение |
Разрезание веревки, взрыв ящиков или лепка виртуальной глины |
|
|
VI. Обратная связь |
N. Тактильная (вибрация) |
Контроллер вибрирует при касании объекта. |
|
O. Визуальная и аудиальная |
Подсветка при наведении, звуки ударов или скольжения. |
|
|
P. Продвинутые технологии |
Haptic-перчатки (ощущение текстуры) или экзоскелеты (сопротивление). |
|
|
VII. Специальные механики |
Q. Левитация и магия |
Управление объектами силой мысли/жестами |
|
R. Масштабирование |
Изменение размера объектов для детального изучения |
|
|
S. Совместная работа |
Передача предметов другим игрокам в многопользовательском режиме. |
Тренажёр позволяет осуществлять подготовку и оценку способности обучающегося выполнять не только проверку готовности, но также поиск и устранение мелких неисправностей оборудования газоперекачивающего агрегата. Работая над его реализацией, мы постарались спроектировать его на основе вышеизложенных принципов и таким образом, чтобы избежать естественных ограничений или отклонений, которые могут возникать при разработке подобного рода ресурсов.
В состав тренажёра входит 12 интерактивных модулей (кейсов). Для выполнения программы работы с тренажёром необходимо отработать игровой сценарий в каждом из модулей. С перечнем модулей можно ознакомиться в соответствующем разделе виртуального планшета, имеющегося у виртуального аватара пользователя.
Для модулей газоперекачивающего агрегата (отдельных кейсов) реализован механизм формирования тренировочных и экзаменационных сценариев (наличие посторонних предметов, отклонения режимов работы или нарушения целостности оборудования, аварийные ситуации). Работать с тренажёром можно в двух режимах: «Тренировка» и «Экзамен». В первом случае пользователю доступны подсказки и указания на объекты, требующие внимания, вот втором – никакой дополнительной информации не предоставляется.

Рисунок 1 – Общий вид конструкций газоперекачивающего агрегата и виртуального планшета с перечнем модулей тренажёра
Для каждого из режимов работы тренажёра реализован механизм фиксации и подсчёта результатов работы обучаемого по трём параметрам: процент верных отметок в чек-листе, процент выполненных необходимых действий для устранения отклонений, процент найденных и удалённых посторонних предметов. Тренажёр учитывает также соблюдение пользователем техники безопасности, а именно фактов падения с высоты, перемещения по непредусмотренным для этого поверхностям (например, трубам и оборудованию, перилам и крышам и т.п.)
Игровой персонаж в тренажёре имеет визуализацию собственного тела (а не только контроллеров или кистей рук), что позволяет более полно и реалистично ощутить собственные виртуальные габариты и свое положение в виртуальном пространстве. Кроме того, такой подход гораздо лучше воспринимается пользователями не знакомыми с виртуальными технологиями, или имеющими только небольшой опыт в виртуальной реальности.
При перемещении пользователь может произвольно двигаться в любом направлении и поворачиваться вокруг своей вертикальной оси, при этом доступен режим ускоренного перемещения (бегом). Для перемещения по наклонным лестницам и другим поверхностям, расположенным выше уровня пола, не требуются особые навыки, однако, если высота объектов выше определённого уровня или наклон слишком велик, необходимо задействовать одну из кнопок игрового контроллера для выполнения прыжка. Если же требуется перемещаться по вертикальными лестницам, достаточно просто перебирать руками, попеременно “захватывая” и “отпуская” перекладины лестницы (достаточно редкая механика для промышленных тренажёров).
В тренажёре реализовано множество механик взаимодействия с интерактивными объектами, а также для управления перемещением игрового персонажа в виртуальном пространстве. При этом, пользователь в реальном пространстве может находиться как положении стоя, так и сидя. Для взаимодействия с объектами, расположенными низко к полу, их подбора, предусмотрен режим присяда виртуального персонажа. Его можно и не использовать, наклоняясь низко к полу из положения стоя или сидя. Однако, в реальности это может оказаться менее удобным, так как некоторые из элементов запорной арматуры расположены очень низко и над ними зачастую присутствуют другие конструкции, которые не позволяют получить доступ к оборудованию сверху. Для дополнительного удобства для простого захвата предметов реализован режим дистанционного взаимодействия, действующий на расстоянии около полутора метров (то есть на таком расстоянии, в пределах которого человек способен дотянуться до предмета без необходимости перемещения).
Кроме непосредственно захвата и перемещения виртуальных объектов существуют вполне привычные в реальной жизни способы взаимодействия с объектами и получения обратной связи. Например, в обычной жизни нам достаточно легко почувствовать движение воздуха или тепло от нагревательного элемента. Этот эффект можно реализовать и в виртуальной реальности, где, как правило, возможности получения обратной связи ограничены. В тренажёре это реализовано таким образом, что при приближении к зоне предполагаемого движения воздуха (или к зоне выделения тепла) контроллер слегка вибрирует, а вокруг запястья показывается анимация завихрения воздуха. При этом цвет анимированного элемента указывает на предполагаемую ощущаемую температуру (синий – ощущается прохладнее, красный – ощущается теплее).

Рисунок 2 – Механики взаимодействия с интерактивными объектами в тренажёре
При повороте элементов запорной арматуры необходимо достаточно чётко зафиксировать её крайнее положение. В реальности мы физически ощущаем ограничение возможности повернуть колесо или ручку дальше, чем это воз- можно, мы чувствуем и слышим, когда происходит соприкосновение с ограничивающими элементами. В описываемом тренажёре это реализовано, как кратковременная вибрация контроллера и звук фиксации запорной арматуры в крайнем положении.

Рисунок 3 – Взаимодействие c виртуальными объектами
Такое множество возможных механик перемещения в сочетании с достаточно реалистичными моделями оборудования компрессорной станции позволяет с одной стороны наиболее полно ощутить габариты и пространство участка, на котором предстоит в реальности работать специалисту, а с другой, усвоить навыки и приёмы взаимодействия с оборудованием достаточно близко к используемым при реальной работе. Мы стараемся, по возможности, не прививать работнику ложных умений или ожиданий от предстоящей работы на компрессорной станции. Если для работы с оборудованием в реальности необходимо наклониться – этого же требует и механика взаимодействия тренажёра, если для перехода между отсеками необходимо потратить некоторое время – в тренажёре придётся проследовать это расстояние пешком и т.п. Эта же механика предотвращает стремление пользователя двигаться бегом или прыжками по металлическим переходам или трубопроводным конструкциям. Виртуальный персонаж "падает" и остаётся неподвижным в течение нескольких секунд, а система контроля добавляет в отчёт отметку о нарушении техники безопасности, что нивелирует "сэкономленное" время, тем самым приучая пользователя, что в спешка в конечном итоге только вредит.
В тренажёре реализована система задания отклонений от рабочего состояния оборудования и конструкций компрессорной станции. Для всех модулей тренажёра существует специальная математическая модель, позволяющая индивидуально установить допустимые диапазоны (процент неисправностей) для каждого из типов отклонений. Например, процент неисправных металлических конструкций, показаний приборов, доводчиков, пылевых наносов и т.п. Но, как мы с вами понимаем, недостаточно только лишь установить набор таких отклонений, необходимо проконтролировать, что пользователь действительно наблюдал или исправил эти неисправности, прежде чем он сделает отметки в чек-листе и за- вершит работу. Учитывая, что сценарий тренажёра требует научиться выявлять возможные неисправности перед пуском газоперекачивающего агрегата, очень важно не допускать ситуации, когда пользователь просто наугад отмечает позиции в надежде, что общие баллы окажутся выше необходимых для зачёта. Именно поэтому, система подсчёта результата спроектирована таким образом чтобы игнорировать даже верные отметки в чек-листе в том случае, если обучающийся не выполнил необходимых действий для проверки реального состояния проверяемых объектов.
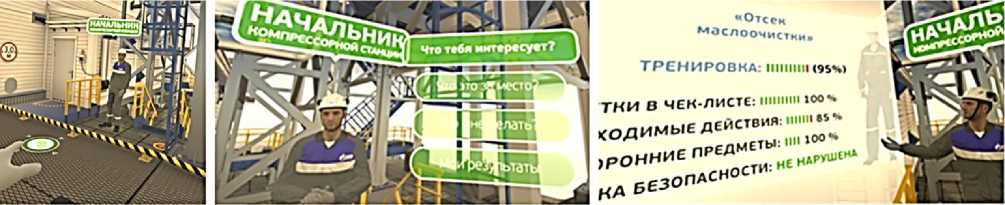
Рисунок 4 – Взаимодействие с неигровым персонажем (начальником компрессорной станции)
Получение результатов работы в модулях тренажёра осуществляется посредством диалога с неигровым персонажем – начальником компрессорной станции. Неигровой персонаж также предоставляет учебную и справочную информации в формате голосовых комментариев или учебных видеолекций по устройству и принципам работы компрессорной станции и агрегатов. Для общения с ним необходимо с помощью виртуальной кисти выбирать варианты возможных фраз диалога на демонстрируемом виртуальном интерфейсе. В зависимости от установленных параметров настроек программы выбрать фразы диалога можно направлением взгляда или с помощью голосового ввода. Для общения голосом необходимо произнести фразу, совпадающую с одним из предложенных вариантом фразы, например, «Что это за место?». Однако, речевой анализатор будет воспринимать и отличающиеся, но совпадающие по смыслу фразы, например, «Где я?» или «Где мы находимся?».
Посредством диалога с неигровым персонажем пользователь может получить информацию о достигнутых результатах. При этом можно получить как общий результат, представляющий среднее значение баллов, полученных после работы с ГПА, так и детальную информацию о результатах работы для последнего посещённого модуля тренажёра с указанием режима работы («Тренировка» или «Экзамен»).
Потребность отрасли в подобных тренажёрах обусловлена целым рядом причин: Подготовка специалистов ООО «Газпром трансгаз
Томск», студентов ТПУ по направлениям нефтегазовой и машиностроительной области и промышленной безопасности; Невозможность реализовать натурный макет газоперекачивающего агрегата (ГПА) в виду его массогабаритных показателей; Возможность реализовать виртуальные модели с необходимыми для учебной задачи особенностями, которые в реальности являются редкими или опасными. Тренажёр позволяет моделировать такие нестандартные ситуации; Необходимость обеспечить самостоятельную подготовку и тренировку учащихся на базе корпоративных образовательных центров и Университета.
Несмотря на существующие проблемы, VR-тренажёры остаются мощным инструментом для профессиональной подготовки. Они позволяют улучшить качество обучения, снизить риски и затраты, а также повысить вовлечённость специалистов. Однако для достижения максимальной эффективности важно учитывать специфику производства и продолжать развивать технологии визуализации, чтобы сделать виртуальные сценарии ещё более реалистичными и полезными.
Применение VR-технологий в корпоративном обучении имеет ряд значительных преимуществ перед традиционными методами подготовки:
Безопасность: возможность проведения тренировок в условиях, максимально приближенных к реальным, без риска для жизни и здоровья работников.
Эффективность: высокая степень погружения в виртуальную среду способствует лучшему усвоению материала и развитию моторики.
Гибкость: возможность настройки различных сценариев и условий работы, что позволяет адаптировать обучение под конкретные потребности каждого работника.
Экономия ресурсов: снижение затрат на приобретение реального оборудования и материалов для практической тренировки.
Мониторинг прогресса: автоматизированная система отслеживания успехов обучающихся, позволяющая оперативно корректировать учебные программы.
На предприятии была создана студия виртуальной реальности, оборудованная современными VR-шлемами и сенсорами движения. Разработка программного обеспечения для тренажеров осуществлялась совместно с ведущими специалистами в области IT Томского политехнического университета и ведущими специалистами производственного отдела по эксплуатации компрессорных станций. Основная цель - создать реалистичную симуляцию рабочих процессов на компрессорной станции, чтобы работники могли отрабатывать необходимые навыки в безопасной среде.
Проект включал участие слушателей 2 групп обучения по программе «Слесарь по ремонту технологических установок» и «Машинист технологических компрессоров» (всего приняло участие 44 чел.). Слушатели прошли предварительное тестирование и оценку уровня подготовленности. В ходе обучения участники выполняли задания:
-
1 . Обход газоперекачивающего агрегата ГПА-32 «Ладога» перед его пуском с отработкой действий и алгоритмов.
-
2 . Замена фильтр-элемента системы подготовки топливного газа на ГПА-32 «Ладога» в многопользовательском режиме (в составе бригады).
Задания различной сложности, моделирующие реальные производственные ситуации. Особое внимание уделялось действиям в чрезвычайных ситуациях, таким как утечка газа или пожар.
Результаты проекта:
-
– высокая эффективность использования VR-технологий. Работники отметили улучшение координации движений, увеличение скорости реакции и повышение уверенности в своих действиях;
-
– повышение качества безопасного выполнения работ на опасном производственном объекте;
-
– развитие уровня профессиональных компетенций в части изучения различных газоперекачивающих агрегатов, с целью взаимозаменяемости и ротации персонала;
-
– повышение уровня коммуникаций работников при выполнении сложных технологических операций;
-
о тработка навыков взаимодействия при выполнении работ в составе бригады;
-
– удаленное знакомство с объектами Общества.
По итогам обучения большинство участников продемонстрировали значительный прогресс в освоении новых навыков и улучшении существующих.
Полученный опыт внедрения VR-технологий открывает широкие перспективы для дальнейшего развития системы корпоративного обучения в ООО «Газпром трансгаз Томск». Среди возможных направлений:
-
1. Расширение ассортимента VR-тренировочных модулей для охвата большего числа технологических процессов.
-
2. Интеграция VR-систем с существующими системами дистанционного обучения и повышения квалификации.
-
3. Создание междисциплинарных учебных курсов, объединяющих теоретические знания и практическое применение через VR-среду.
-
4. Внедрение элементов геймификации для повышения мотивации работников к обучению.
Исследование подтвердило высокую эффективность использования технологий виртуальной реальности в корпоративном обучении персонала
ООО «Газпром трансгаз Томск». Применение VR-тренажеров позволило значительно улучшить качество подготовки персонала, снизить риски аварийных ситуаций и оптимизировать затраты на обучение. Полученные результаты свидетельствуют о больших перспективах данного подхода и открывают новые возможности для совершенствования образовательных программ на предприятии.
