Решение задачи динамики сильно вязких несжимаемых сред и его приложение к моделированию напряженно-деформированного состояния тектоносферы Земли

Автор: Косыгин Владимир Юрьевич, Пятаков Юрий Владиславович
Журнал: Вычислительная механика сплошных сред @journal-icmm
Статья в выпуске: 4 т.4, 2011 года.
Бесплатный доступ
Получено решение фундаментальной системы уравнений динамики сильно вязких однородных несжимаемых сред, позволившее перейти от неоднородной системы уравнений к вычислению интегралов определенного вида при достаточно общих ограничениях на характер распределения внешних сил. Как частный случай, построено аналитическое решение задачи определения напряжений и деформаций в тектоносфере, создаваемых вязким аномальным по плотности включением (в виде многогранника) в гравитационном поле Земли. Используемое предположение о том, что вмещающая среда и включение имеют одинаковую вязкость, ограничивает область практического применения найденных результатов, но не умаляет их теоретического значения.
Тектоносфера, неоднородность, вязкость, уравнения динамики, скорость, давление, гравитационное поле, многогранник
Короткий адрес: https://sciup.org/14320579
IDR: 14320579 | УДК: 539.374
Solution of the problem of dynamics of highly viscous, incompressible media and its application to modeling the stess-strain state of the Earth's tectonosphere
The fundamental system of dynamic equations that describe highly viscous, homogeneous incompressible media has been solved. This allows us to make the transition from the non-uniform system of equations to the calculation of integrals of a certain type under rather general restrictions on the character of distribution of external forces. As an example, an analytical solution has been found for the problem of deformations and stresses in tectonosphere caused by the action of a viscous, abnormal in density, inclusion (in the form of polyhedron) in the Earth's gravitational field. The medium and inclusion are assumed be of identical viscosity, which restricts the applicability of the obtained results, but does not lessen their theoretical importance.
Текст научной статьи Решение задачи динамики сильно вязких несжимаемых сред и его приложение к моделированию напряженно-деформированного состояния тектоносферы Земли
с вязкостью n ~ 1019...10 24 Паю. С учетом этих обстоятельств движения тектоносферы могут быть описаны уравнением Навье–Стокса в приближении малых чисел Рейнольдса (Rе << 1) и уравнением неразрывности [1–3], которые в этих условиях существенно упрощаются и в векторной форме имеют следующий вид:
-V p (x) + nV2u (x) + H (x) = 0, (1) V u (x ) = 0. (2)
Здесь x — радиус-вектор расчётной точки среды (в дальнейшем для краткости будем называть его расчетной точкой x или просто точкой x ); u ( x ) — вектор мгновенной скорости смещения среды в расчётной точке x ; p ( x ) — давление в точке x ; H ( x ) — вектор массовой силы в точке x , отнесённый к единице объёма; η — коэффициент динамической вязкости среды; V — дифференциальный оператор «набла»; V 2 — дифференциальный оператор «лапласиан».
В подобной постановке решены, как численно , так и аналитически, многие задачи, составляющие основу гидродинамической теории смазки и имеющие большое значение в химической технологии, в биологических и других приложениях. При этом точные аналитические решения получены лишь для случаев, когда границы сред представляются поверхностью или системой поверхностей относительно простой геометрической формы (плоскостью, цилиндром, сферой, эллипсоидом и так далее), что существенно упрощает реализацию задачи. Однако при изучении напряжений, деформаций и мгновенных скоростей вязкого смещения среды в тектоносфере Земли использование этих результатов ограничивается сложностью форм и неоднородностью строения реальных моделей тектоносферы.
В данной работе рассматривается решение фундаментальной системы уравнений динамики сильно вязких сред, соответствующей системе уравнений (1), (2), которое в целом ряде случаев позволяет получить конечный аналитический вид решения задачи для более сложных моделей строения различных областей тектоносферы Земли.
-
2. Постановка задачи
-
3. Решение задачи
Требуется найти решение системы уравнений (1), (2) для некоторой произвольной ограниченной области V ( V с E 3 , E 3 — трехмерное евклидово пространство). Рассматривая область сколь угодно большой ( V > E 3 ) , предположим, что искомые функции u ( x ) и p ( x ) удовлетворяют условиям на бесконечности:
U ( x ) = O ( x| - 1 ) , p ( x ) = O ( x| - 2 ) при |x| >^ ( г = 1,2,3 ) , (3) где |x| = ^x ^ + x 22 + x 32 — норма точки x , x 1 , x 2, x 3 — её координаты в декартовой системе Ox 1 x 2 x 3 ; u ( x ) — z- я компонента вектора u ( x ) . Допустим также, что функция H ( x ) непрерывна вместе со своими первыми производными в некоторой ограниченной области D с V , а вне её H ( x ) ^ 0 . Иными словами, H ( x ) есть финитная функция с носителем supp H ( x ) = D . Кроме того, будем считать, что области D и V ограничены кусочно-гладкими поверхностями 5 D и 9 V .
Получим формальное решение задачи. Для этого возьмём дивергенцию от обеих частей уравнения (1) и, учитывая уравнение (2), будем иметь
V (-V p (x) + n-V2u(x) + H (x))=-Ap (x) + n-V2 (Vu(x))+V H (x) = -V2 p (x)+V H (x) = 0
или
V 2 p ( x ) = -V ( - H ( x )) . (4)
Уравнение (4) является уравнением Пуассона относительно функции давления p ( x ) . Так как выражение V ( - H ( x )) в правой части равно нулю вне области V вследствие финитности функции H ( x ) , а область V ограничена кусочно-гладкой поверхностью 5 V , то решение этого уравнения, удовлетворяющее при |х| ^ да условиям (3) , можно записать в виде
p ( x ) = -y ( 4 n ) J [v H ( X )/ R ( x , X ) ] d - V , (5)
V где R(x,X)= |x - X|; d§V — элементарный объём, содержащий переменную интегрирования X = (^1, ^2, 4;), 4i — значения её координат.
Учитывая тождество
У R (x, X ) = v2 R (x, X)/2, уравнение (5) можно переписать в виде p (x ) = -У (8n)V2 JR (x, X )V H (X )dV. (6)
V
Здесь и в дальнейшем, там, где под операторами V 2 и V стоит функция двух переменных x и ξ , дифференцирование будем осуществлять только по переменной x .
Подставляя (6) в уравнение (1), получим
V 2
У( 8 п ) V J R ( x , X ) V H ( X ) dV + p- u ( x ) V
= - H ( x ) .
Уравнение (7) также является уравнением Пуассона относительно функции, представленной выражением под лапласианом. Так как функция H ( x ) в правой части равна нулю вне области V , а искомая функция удовлетворяет условиям (3) на бесконечности, то решение уравнения (7) можно записать в виде
-
У ( 8 n ) V j R ( x , X ) V H ( X ) dV + n- u ( x ) = 1/ ( 4 n ) J [ H ( X )/ R ( x , X ) ] d ^ V .
VV
Отсюда найдем выражение для функции u ( x ) :
u ( x ) = У( 4 nn ) J [ H ( X )/ R ( x , X ) ] d ^ V - У( 8 nn ) v J R ( x , X ) V H ( X ) d ^ V . (8)
VV
Преобразовав второй интеграл в правой части (8) по формуле Гаусса–Остроградского, получим:
u ( x ) = 1 ( 4 nn ) J [ H ( X )/ R ( x , X ) ] dV - 1 ( 8 nn ) v J H ( X ) V R ( x , X ) dV -
VV
-
- 1 ( 8 nn ) v J H ( X ) n ( X ) R ( x , X ) d , S .
d V
Здесь n ( X ) — единичный вектор внешней нормали к поверхности 5 V в текущей точке X ; d ^ S — элемент 5 V , содержащий точку X .
Так как интеграл по 5 V в правой части (9), вследствие финитности H ( x ) , равен нулю, выражение для функции u ( x ) приобретает следующий окончательный вид:
u ( x ) = у ( 4 nn ) J [ H ( X )/ R ( x , X ) ] d , V - У ( 8 nn ) v J H ( X ) V R ( x , X ) d ^ V . (10)
VV
Выражения (6), (10) являются формальным решением системы уравнений (1), (2).
Представим теперь эти выражения в проекциях на оси системы координат Ox 1 х 2 х 3 :
e,(x)-V(4nn)J[Hj^MR(x,^)]dV-1 (8™1)£JHi^-TR2^)dV (j = 1,2,3),(11)
V i=1 V p (x) = -1 (4n)vJ[H (5) R-1 (x,5)] dV = -1/ (4л)£ Aj Hj(^) R (x,5) dV,(12)
V j=1 dXj V где Hj (5) — j-я компонента вектора массовых сил H(5).
Рассмотрим частный случай, а именно действие единичной сосредоточенной силы, приложенной в начале координат и направленной по оси Ox i . Данную силу можно трактовать как распределение массовых сил, определяемых следующей формулой [4]:
H , ( 5 ) = 8 „ 8 ( 5 ) ( i , j = 1,2,3 ) .
Здесь 5j — символ Кронекера, 5(5) — обобщённая 5 -функция Дирака от векторного аргумента. Подставив (13) в (12), получим pi (x)=-1 (4п) t^ f 8, -8(5) ■ R-1 (x,5)ds V=-1 (4n) 8R ' (x,0) (i = 1,2,3) (14)
j-=1 dxj V dxi и аналогично после подстановки (13) в (11):
. , , \ 5 j , d2 R ( x , 0 )
( i , j = 1, 2, 3 ) .
и (x) = V(4 др ) J -1 (8 др )---------
А ’ ’ R ( x , 0 ) /V ’ d x i dx j
Здесь u j ( x ) — j -я компонента вектора скорости u 1 ( x ) ; u 1 ( x ) и p i ( x ) — скорость и давление, обусловленные действием единичной сосредоточенной силы, направленной по оси Ox i и приложенной в начале координат. В общем же случае, когда сосредоточенная сила приложена не в начале координат O , а в произвольной точке 5 , выражения (14), (15) принимают вид:
u i ( x , 5 ) = g j ( x , 5 )/й , где g j ( x , 5 ) = -У( 8 п ) d R ( x5 ) + У ( 4 п )3- , (16)
d X j d X i r ( x , 5 )
p i ( x , 5 ) =- v ( 4 n)d x - [ R c x : 5 ) ] • (17)
Формулы (16), (17) представляют собой решение так называемой фундаментальной системы уравнений [5], отвечающей системе (1), (2):
pi (x, 5 ) + n2u1 (x, 5 ) + 5( x - 5) i = 0, ui( x, 5 ) = 0, где i — i-й орт декартовой системы координат Ox 1 х2 х3. Это решение, как несложно заметить, удовлетворяет условиям:
u j ( x , 5 ) = O ( R - 1 ( x , 5 ) ) , p i ( x , 5 ) = O ( R "2 ( x , 5 ) ) при R ( x , 5 ) ^« .
Поскольку по условиям задачи внешние силы H ( x ) распределены в ограниченном объёме D , где D с V , решение системы уравнений (1), (2) можно записать в виде:
u ( x ) = (V n ) J G ( x , 5 ) • H ( 5 ) dV , (18)
D
p ( x ) = J P ( x , E ) • H ( E ) d , V , (19)
D где G(x, E) — симметричная квадратная матрица третьего порядка, элементами которой являются величины gj (x, E), представленные формулой (16), а
P ( x , E ) = ( p 1 ( x , E ) , p 2 ( x , E ) , P 3 ( x , E ) ) — трёхмерный вектор, компоненты которого p‘ ( x , E ) определяются выражением (17). При этом в окрестности бесконечно удалённой точки решения (18), (19) удовлетворяют условиям:
u i ( x ) = O ( |x |-1 ) , p i ( x ) = O ( |x |-2 ) при |x | >^ .
Несложно показать, что если граница 5 D объёма D является достаточно гладкой и удовлетворяет условиям А.М. Ляпунова [6], а функция H ( x ) непрерывна по Гельдеру [7] в области D c параметром а (0 <а< 1), то полученное решение (18), (19) системы уравнений (1), (2) существует и единственно. Однако из-за ограничения объёма статьи доказательство этого факта здесь опускаем.
-
4. Формулировка задачи моделирования тектоносферы
Выберем декартову систему координат Ox1x2x3 таким образом, чтобы ось Ox3 была направлена вертикально вниз. Возьмём в качестве неограниченной области V с E3
полупространство x 3 > 0. Будем полагать также, что плоскость x 3 = 0 совпадает с поверхностью Земли (выпуклостью земной поверхности пренебрегаем), а ось Ox 3 , следовательно, направлена к центру Земли перпендикулярно её поверхности. В этом же направлении, как известно, действует вектор силы тяжести g = g • i3 , где g = |g| = 9,8 м • с - 2, а i3 — орт оси Ox 3. Кроме того, предположим, что полупространство x 3 > 0 (толща Земли) заполнено сильно вязкой однородной (в смысле вязкости) несжимаемой средой, и движение этой среды происходит в однородном гравитационном поле Земли. При этом вектор массовых сил H ( x ) определим выражением H ( x ) = р ( x ) • g = р ( x ) • g • i3 = H 3 ( x ) • i3 , где Н 3 ( x ) — компонента вектора H ( x ) , направленная по оси Ox 3, р ( x ) — плотность среды.
Положим р ( x ) = р 0 ( x ) + Ар ( x ) , где под р 0 ( x ) понимается некоторое механически равновесное распределение плотности Земли [8, 9], изменяющееся только вдоль оси Ox 3 ( р 0 ( x ) = р 0 ( x 3 ) ), а под Ар ( x ) понимается так называемое аномальное распределение плотности. Равновесному распределению плотности отвечают следующие выражения для вектора мгновенной скорости смещения среды u 0 ( x ) и равновесного давления p 0 ( x ) :
x 3
u0(x) = 0, p0 (x) = J gр0 (E3)dE3. Так как распределение плотности р(x) отлично от равновесного р0 (x), то и давление p(x) также будет отличным от равновесного давления p0 (x). Назовём аномальным давление Аp(x) , вычисляемое с помощью выражения
А p ( x ) = p ( x )- p 0 ( x ) . (20)
Аналогично обозначим как A u ( x ) аномальную скорость смещения среды:
A u ( x ) = u ( x ) - u 0 ( x ) . (21)
Отсюда p (x) = p o(x) + Дp (x), u(x) = Uo(x) + Au(x).(22)
Запишем выражение для массовых сил H ( x ) более подробно, с учётом того, что р ( x ) = Р о ( x ) + Др ( x ) :
Н ( x ) = р( x )• g • i3 =(ро ( x ) + Др( x ))• g • i3 = Ро ( x )• g • i3 + Др( x )• g • is .
Полагая H 0 ( x ) =р 0 ( x ) ^ g - i s и Д Н ( x ) = ДР ( x ) • g • i3 , запишем выражение (23) в виде:
Н (x) = Но (x) + ДН (x),(24)
откуда
АН(x) = Н(x)-Но (x),(25)
где Н о ( x ) назовём равновесным, а Д H ( x ) — аномальным распределением массовых сил.
Подставив выражения (22), (24) для функций p ( x ) , u ( x ) и H ( x ) в уравнения (1), (2), получим новую систему
-
-V (Дp (x)) + nV2 (Au (x)) + АН (x) = о,(26)
-
V (Дu (x )) = о,(27)
-
5. Решение задачи моделирования
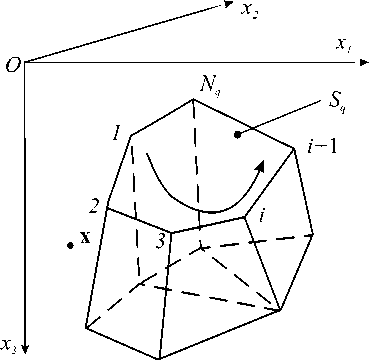
Рис. 1. Многогранник DQ ( Sq – q -я грань многогранника, x – расчётная точка; стрелкой показано направление обхода точек грани при нумерации)
из рассмотрения которой видно, что здесь, в отличие от системы (1), (2), вместо функций p ( x ) , u ( x ) и H ( x ) присутствуют их аномалии Д p ( x ) , Д u ( x ) и Д H ( x ) , понимаемые в смысле выражений (20), (21) и (25). Так как в дальнейшем изложении всегда вместо функций р ( x ) , p ( x ) , u ( x ) , H ( x ) будем рассматривать их аномалии, то значки аномальности Д опускаем. С учётом этого система уравнений (26), (27) становится совпадающей по виду с системой (1), (2), но под p ( x ) , u ( x ) , Н ( x ) понимаются уже не сами эти функции, а их аномалии. На основании вышеизложенного решение такой системы определяется соотношениями (18), (19), в которых полагается Н ( x ) = p ( x ) • g 43, где р ( x ) — аномальная плотность, а Н ( x ) — аномальные массовые силы.
При проведении численных расчётов любое аномальное по плотности геологическое тело (любую неоднородность тектоносферы) удобно аппроксимировать с помощью системы элементарных тел (многогранников), имеющих постоянные значения аномальной плотности р(x). Покажем, что компоненты скорости смещения среды и давление, обусловленные влиянием таких тел в гравитационном поле Земли, могут быть выражены в явном виде. Для этого рассмотрим многогранник произвольной формы, расположенный в полупространстве x3 > о (Рис. 1). Обозначим его как DQ, где Q —
Q число граней Sq, а dDQ = ^ Sq — поверхность, q=1
ограничивающая DQ . Грань Sq представляет собой плоский многоугольник, имеющий Nq вершин. При этом вершины такого многоугольника считаются пронумерованными в положительном направлении, если при движении по ограничивающей его ломаной линии дSq область Sq остается слева.
Аномальную плотность ρ многогранника DQ будем считать постоянной.
Тогда, при условиях, сформулированных в предыдущем разделе статьи, соотношения (18), (19), дающие общее решение задачи, преобразуются к виду:
u j ( x ) = P" g f g" ( x ^ ) ' h ( 5 ) d 5 V , n D Q
P ( x ) = P- g f P 3 ( x , 5 ) • h 3 ( 5 ) d 5 V ( j = 1, 2, 3 ) .
D Q
Подставив в (28) выражение для g j ( x, ^ ) из (16), получим:
uj
( x )=^ f g j ( x , 5 ) d t V -8 nnJ
DQ
n D
Q
д2 R (x,5) , 5/3 , 1
---(-^ d 5 V + [ —--- d 5 V = д x 3 д x j ^ 4n D R (x, 2) ^
l g f 8 пП д D Q
Y( 5 ^^ 5 S +^ (
1 d ξ V ,
R ( x , 2 )
где у (5) — косинус угла между осью Ox3 и вектором внешней нормали к дdq , а интеграл dξV представляет собой гравитационный потенциал однородного
DQ R ( x , ^ )
многогранника; его аналитическое выражение приведено в работах [10, 11].
Для расчета первого интеграла в правой части (29) воспользуемся вспомогательными ортогональными системами координат O2q 22 2q, связанными с гранями Sq многогранника DQ соотношениями
( 5 q ) T = м q ( 5 - x ) T, 5 q = (y , 2 2 , 2 f ) ( q = 1,..., Q ) . (30)
Здесь T — знак операции транспонирования; M q — ортогональная матрица преобразования (30), такая, что в новой системе координат плоскость, несущая грань Sq , имеет уравнение 2 2 = const, а угол между осями O 2 2 и Ox 3 не превышает п/2. Если в системе координат Ox 1 x 2 x 3 грань S q задается уравнением A q x 1 + B q x2 + C q x3 + D q = 0, то выражение для ортогональной матрицы М q имеет вид:
М q =
— B2 D 2 /( Г 2^2 й
- A q CD q К r q R q D . 1) A q C q R q C q
A q D q /( r . D . I)
- B q CD qk RM
B q C q R q C q
r q C q D q r q R q D q C q R q
где r q = 7 Aq + B q ,
R q = AA + + Bq 2 + C q . Очевидно, что имеют место и обратные к (30) преобразования координат:
( 5 - x ) T = M T ( 5 q ) T. (31)
Применяя соотношения (30), первый интеграл в правой части (29) преобразуем к виду:
f y ( 5 )^ R 2-x , 5 ) d . S = ]T Y q |5 j Z x L d 2 q d 2 2 ( j = 1,2,3 ) , (32)
д D Q д2 j q = 1 s q R ( x , 5 )
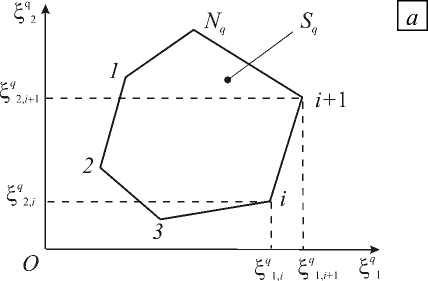
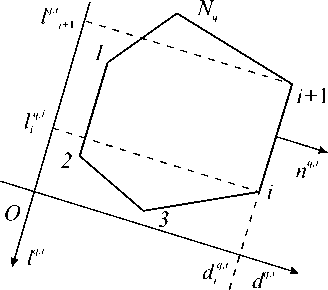
Рис. 2. Грань Sq многогранника DQ в связанной с ней ( а ) и во вспомогательной ( б ) системе координат
б
где у q = C q / ^ q — косинус угла между положительным направлением оси Ox 3 и вектором внешней нормали к грани S q многогранника D Q . Расположение грани S q в координатной плоскости O E q E q системы координат O E q E q E q приведено на рисунке 2, а .
Используя соотношения (31), определим интеграл в правой части (32):
E- x
jjqq qqqqqq
J Е 1 Е 2 m j 1 J Rd Е 2 m j 2 J Rd E 1 + m j 3 E 3 Q q ( X ) ,
Sq R ( X, ^ ) gSq gSq где R = R(x,E) = R(Eq) = J(Eq) + (Eq) + (Eq) , m‘q — элементы матрицы МT = m'q , 123, jk qjk
( j , k = 1,2,3 ) , а Q q ( x ) = J ( 1 R ) d E q d E q представляет собой потенциал грани S q .
S q
Величина R = ^( E q ) + ( E q ) + ( E 2 )
является инвариантной относительно ортогонального
J Rd E q a s q
преобразования координат системы OEq Eq, поэтому вычисление интегралов и J Rd Eq в правой части (33) удобнее выполнять во вспомогательной координатной
8Sq системе Ol4, idq, ', получаемой поворотом системы OEq Eq вокруг ее начала O таким образом, чтобы направление оси Od q,i совпало с направлением вектора внешней нормали nq’' к i-му отрезку ломаной 5Sq, соединяющему '-ю и (i + 1)-ю вершины многоугольника Sq (Рис. 2, б). При этом координаты точек отрезка оси Od q,i сохраняют постоянство (df, i = const), а значения lq, i и dq, i определяются по формулам l* ,'= mq;-Eq + mqa-Eq, dq ,‘= mqi E + mn-E?, ■ Здесь m« =(E^1,-Eu+1) Jk, mq, =(E!i-Eq,i.i)/k, m q1i=-(E2,i-E2.,+.)/k, m*!i=(E*,i-E*i+1) /k,
k=^Ei
-E q, + 1 ) 2 + ( E 2, i -E q , i . i ) 2,где E q , i , E q,
— координаты i -й вершины многоугольника
S q ( i = 1,..., N q + 1 ), E q Nq + 1 =E 1 q 1, E q , Nq + 1 = E q , 1, а компоненты вектора нормали n q , i связываются со вспомогательными координатами следующими формулами: n , ' = - ( E 2, i -E 2, i + 1)/ k , n q , ' = ( E q , , -E q , i . 1)/ k .
Тогда в новой системе координат первый интеграл в правой части (33) определится следующим образом:
N q ^ q , . + 1
J Rd eq = Z J Rd eq,
SSq ' ' 52,, qq,
52,+i l2i+i qi где
J Rd52 = nqi J (jqlqi)2 +(d,,)2 +(yq)2diq4 = n^{R• iq, +1 (d,,)2 +(yq)2 lln(R+lqi)} eq,, У 2
l qi = i qi p i = iq,‘
Аналогично находим интеграл J Rd y q .
a S q
На основании формул (29)–(34) получим аналитическое представление для компонент U j ( x ) вектора мгновенной скорости смещения среды u ( x ) :
j ’b-S
Q N q qq ,
Z r q Z q = 1 i = 1
- m^

- Rqlq,'+[(d ^ +(5q )2
/<•-/-
+ i q ,i
q
+m4 Qq +5j3 •y3 Q (x)
( j = 1,2,3 ) ,
где выражение для потенциала Q q ( x ) q -й грани Sq многогранника D Q имеет вид [10, 11]:
Q N q R q - i q,i ( i q - i>q i q,i i q - i' y q i q, A
Q, ( x ) = Y Y i q,! In ——— +5 q arctg i + 1 3 — arctg — 1-- arctg i . 3 + arctg— q V 7 Z = 1 Z ‘ R i + i q , I d q , ' R + d^ q ,1 ddf , ‘Rqi ddi ,1 J
Подставив в формулу для давления из (28) выражение (17) для p 3 ( x,^ ) и приняв во внимание, что Q ( x ) = [— d ^ q d ^ q , найдем выражение для давления p ( x ) :
q R 12
Sq
/ \ _ Рg f d 1 ,УК Jt! Jt! _ Pg V v f d ^qd5q - Pg Vv О M p ( x )= d/ e\d 51 d52d53 = о ZY ql р/ e\ л ZY qQ q (x) .
4 n D Q d x 3 R ( x , ^ ) 8 nn q : 1 q S q R ( x , ^ ) 4 n q = 1
Компоненты тензора напряжений вычислим по формулам
T j ( x ) = n ( d ui ( . x )/d x j +d u j ( x )/d x ) - 5 j P ( x ) ( г , j = 1,2, 3 ) .
-
6. Результаты
Полученные в явном виде выражения характеристик геомеханического состояния сплошной сильно вязкой несжимаемой среды (35)–(38) использовались далее для расчета напряжений и векторного поля мгновенных скоростей смещения в тектоносфере Земли при наличии в ней некоторого аномального включения.
На рисунке 3 приводятся результаты вычисления вертикальной и тангенциальной компонент тензора напряжений, а на рисунке 4 — поле мгновенных скоростей смещения среды, обусловленных влиянием аномального тела, представляющего собой горизонтальную призму с сечением в форме равнобедренного треугольника. Вязкости вмещающей среды и самого тела считались постоянными и равными п = 10 19 Па • с, плотность аномального тела равнялась р = 20 кг/м3 . Горизонтальное основание призмы располагалось на глубине 380 км перпендикулярно направлению вектора ускорения силы тяжести g . Размеры призмы составляли: 500 км по оси Ох 1 , 250 км по оси Ох 3 , 1000 км по оси Ох 2 (ось Ох 2 перпендикулярна плоскости рисунка и направлена от зрителя). Вычисления характеристик среды проводились в плоскости симметрии аномальной призмы ( х 2 = 0).
О 100 200 300 400 500 600 700 800
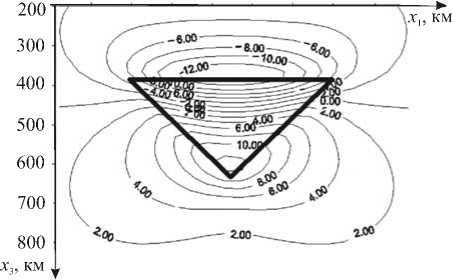
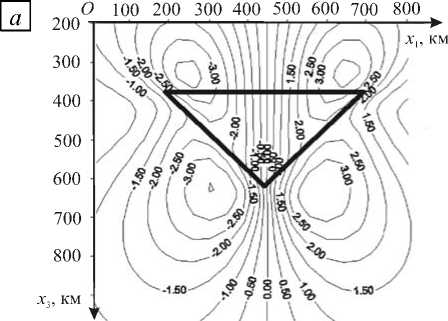
Рис. 3. Изолинии вертикальной τ 33 ( а ) и тангенциальной τ 13 ( б ) компонент тензора напряжений (МПа),
б
возникающих в тектоносфере при наличии в ней призматического аномального включения
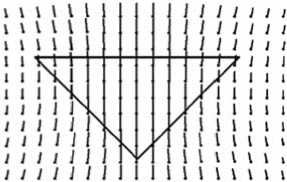
Рис. 4. Распределение векторов мгновенной скорости смещения u ( x ) среды, имеющей вязкость η = 1019Па ⋅ с ; u max = 8,7 м/год
-
7. Заключение
Используя различные композиции из элементарных аппроксимирующих тел (многогранников) можно со сколь угодно большой точностью построить модель тектоносферы Земли и рассчитать ее напряженно-деформированное состояние. Так как в данной работе решение задачи получено в конечном виде, его точность будет зависеть только от точности аппроксимации, погрешности исходных данных и ошибок округления. Однако предположение однородности по вязкости у аномального по плотности включения и вмещающей его среды — тектоносферы в определенной мере сужает область практической применимости полученных результатов. Вместе с тем аналитическое решение подобной задачи имеет и самостоятельное теоретическое значение.
Список литературы Решение задачи динамики сильно вязких несжимаемых сред и его приложение к моделированию напряженно-деформированного состояния тектоносферы Земли
- Артюшков Е.В. Геодинамика. -М.: Наука, 1979. -328 с.
- Лойцянский Л.Г. Механика жидкости и газа. -М.: Наука, 1970. -904 с.
- Ландау Л.Д. Лифшиц Е.М. Гидродинамика. -М.: Наука, 1986. -736 с.
- Новацкий В. Теория упругости. -М.: Мир, 1975. -872 с.
- Ладыженская О.А. Математические вопросы динамики вязкой несжимаемой жидкости. -М: Наука, 1970. -288 с.
- Гюнтер Н.М. Теория потенциала и ее применение к основным задачам математической физики. -М.: Изд-во технико-теоретической литературы, 1953. -416 с.
- Ильин В.А., Позняк Э.Г. Основы математического анализа. -М.: Наука, 1973. -Ч. 2. -448 с.
- Серкеров С.А. Теория гравитационного и магнитного потенциалов. -М.: Недра, 1990. -304 с.
- Косыгин В.Ю. Гравитационное поле и плотностные модели тектоносферы Северо-Запада Тихого океана. -Владивосток: ДВО АН СССР, 1991. -201 с.
- Старостенко В.И. Гравитационное поле однородных n-угольных пластин и порождаемых ими призм: обзор//Физика Земли. -1998. -№ 3. -С. 37-53.
- Страхов В.Н., Лапина М.И. Прямые задачи гравиметрии и магнитометрии для произвольных однородных многогранников//Изв. АН СССР. Физика Земли. -1982. -№ 4. -С. 45-67.
