Робот-проектант: на пути к реальности

Автор: Боргест Н.М., Власов С.А., Громов аЛ.А., Громов аН.А., Коровин М.Д., Шустова Д.В.
Журнал: Онтология проектирования @ontology-of-designing
Рубрика: Методы и технологии принятия решений
Статья в выпуске: 4 (18) т.5, 2015 года.
Бесплатный доступ
Со времени выхода статьи «Робот-проектант: фантазия и реальность», опубликованной в журнале «Онтология проектирования» №4(6) в 2012 году, прошло ровно три года. В данной статье представлены новые результаты исследований, выполненных в Самарском государственном аэрокосмическом университете имени С.П. Королева, в области автоматизации предварительного проектирования самолета. Основное внимание уделено формализации знаний, проектных процедур и операций в выбранной предметной области, семантическому и математическому моделированию. В качестве семантической основы будущей информационной системы (интеллектуального помощника проектанта) выступает тезаурус предметной области, который является интегратором всех баз данных, знаний, процедур и сценариев проектирования. Существенным развитием в формализации проектных работ является математическое моделирование - симбиоз параметризованных геометрических 3D моделей, статистических и конечно-элементных моделей при оценке аэродинамических нагрузок, прочности и масс конструкции. Особое место в создании робота-проектанта занимает интерфейс, который должен обеспечить конструктора всей необходимой информацией для принятия окончательных решений и «объяснить» при необходимости «свои» рекомендуемые решения. Созданный прототип робота-проектанта в виде демонстрационного образца в сложной, высокотехнологичной и наукоёмкой области позволяет надеяться в будущем на реализацию автоматического проектирования простых конструкций и сокращение времени проектирования традиционных схем артефактов.
Робот-проектант, 3d модель, конечно-элементная модель, тезаурус, самолет
Короткий адрес: https://sciup.org/170178706
IDR: 170178706 | УДК: 629.7.01 | DOI: 10.18287/2223-9537-2015-5-4-429-449
Robot-designer: on the road to reality
Three years have passed since the article “Robot-designer: fantasy and reality” was published in the “Ontology of designing” journal No. 4(6) in 2012. This article aims to summarize the results, achieved in Samara State aerospace university in the field of aircraft preliminary design automation. The emphasis was made on the formalization of knowledge, design scenarios and operations in the chosen engineering domain, semantic and mathematical modelling. A “Preliminary aircraft design” thesaurus serves as a semantic basis for the future software system, acting as an integration backbone for data and knowledge bases, design operations and scenarios. A distinctive progress has been achieved in the field of mathematical modelling - a symbiosis of parameterized geometrical models, statistic and finite-element models for evaluation of aerodynamic loads, structural stress and weight. A specific user interface is being created in order to provide a designer with a comprehensive tool that would give the user the necessary information on the project and, if necessary, to “explain” the decisions, that the system makes, or suggests on its own based on the chosen design scenario. Prototype of the “Robot-designer” system, created as a demo unit in a complex high-tech area, holds out a hope of possibility of full automation in the field of designing structures of traditional forms, reducing time, necessary to design artifacts of traditional schemes.
Текст научной статьи Робот-проектант: на пути к реальности
Интеллектуализация создаваемых машин, появление роботов, беспилотных летательных аппаратов в небе и в космосе, наземных, подземных, надводных и подводных транспортных средств уже ни у кого не вызывает удивление. Проведённый анализ существующих и разрабатываемых систем интеллектуальной поддержки показывает, как стремительно вторгается в нашу жизнь новое поколение машин – интеллектуальных помощников в реализации всё возрастающих потребностей [1]. Крупнейшие технологические и научные центры Америки, Европы и Азии вступили в борьбу за инновационные рынки. Ярким примером поиска прорывных идей и технологий является программа Европейского союза «Горизонт 2020» [2]. До 2020 года 80 млрд. евро в дополнении к частным инвестициям направляются на поддержку работ, которые позволят выйти открытиям и нововведениям из лабораторий в реальный рынок. И «умные» технологии занимают далеко не последнее место в этой гонке.
Амбициозные цели, поставленные перед Самарским государственным аэрокосмическим университетом имени академика С.П. Королева (СГАУ) войти к 2020 году в ведущие мировые научно-образовательные центры, сродни, выражаясь философским языком, трансценди-рованию и предполагают всем причастным к «альма-матер» ставить перед собою не менее амбициозные задачи. Представленные результаты – это фактически продолжение статьи «Робот-проектант: фантазия и реальность», опубликованной ровно три года тому назад в журнале «Онтология проектирования» №4(6) [1]. В новых результатах исследований, выполненных в СГАУ в области дальнейшей автоматизации предварительного проектирования самолета (ППС), упор сделан на стремление «передачи» описанных и формализованных знаний компьютеру, что позволит в чём-то приблизить наши исследования к реальным возможностям их практического использования в будущем.
Основное внимание уделено формализации знаний, проектных процедур и операций в выбранной предметной области (ПрО), семантическому и математическому моделированию. В качестве семантической основы будущего интеллектуального помощника проектанта выступает тезаурус, который является интегратором всех баз данных, знаний, процедур и сценариев проектирования. Формализация проектных работ во многом опирается на математическое моделирование и, в частности, на применение и взаимное дополнение параметризованных 3D моделей, статистических и конечно-элементных моделей при оценке форм и размеров самолёта, аэродинамических нагрузок, прочности и масс конструкций.
Традиционно особое место в создании человеко-машинных систем и робота-проектанта, в частности, занимает интерфейс, который должен обеспечить конструктора всей необходимой информацией для принятия окончательных решений и «объяснить» при необходимости «свои» рекомендуемые решения, получаемые на основе «зашитых» в его память знаний. Созданный прототип робота-проектанта в сложной, высокотехнологичной и наукоемкой области в виде демонстрационного образца позволяет надеяться в будущем на реализацию автоматического проектирования простых конструкций и сокращение времени проектирования традиционных схем различных артефактов.
1 Формализация знаний
Системы, моделирующие накопленные знания, находят всё более широкое применение в промышленных системах поддержки проектирования. Как правило, знания в ПрО уже доступны пользователям в форме технических инструкций, справочников, чертежей и опыта специалистов. Однако, проблема перевода имеющихся знаний в форму, пригодную для машинной обработки, всё ещё актуальна и зачастую препятствует практической реализации систем интеллектуальной поддержки. Мировой опыт создания систем формализации знаний показывает, что разработка подобных программных продуктов, как правило, сталкивается с двумя основными дилеммами [3].
Проблема одного эксперта. Зачастую «движущей силой» проекта является конкретный специалист высокой квалификации, который выполняет большую часть работ по моделированию знаний, относящихся к проекту. Однако, при увеличении объема проектных данных возникает необходимость распределения работ, что, с одной стороны, позволяет снизить нагрузку на ключевого специалиста, а с другой, приводит к риску понижения качества информационной модели. Эта проблема дополнительно усугубляется тем, что не все современные системы поддержки проектной деятельности обладают функционалом распределённой работы над проектом, что создаёт дополнительные риски при реализации проектов. Таким образом, существует дилемма выбора между единоличным и распределённым процессом работы над проектом.
Проблема гибкости инструмента . Современные инструменты формализации знаний, как правило, предназначены для решения узких задач в ПрО, что делает их малоприменимыми для формализации знаний о проекте в целом. Кроме того, знания могут находиться в различных формах в виде таблиц, текста или алгоритмов. Расширение функциональных возможностей программного продукта в области формализации знаний, как правило, приводит к увеличению сложности его использования, что в свою очередь приводит к уменьшению эффективности работы. Таким образом, возникает дилемма выбора между максимально продуктивным и максимально универсальным инструментом.
Для того чтобы сохранить и передать накопленный опыт и знания, человек традиционно выстраивает целую образовательную систему по подготовке специалистов. В отличие от человека, «научить» машину сложнее, так как современные компьютеры пока не обладают образным мышлением, не владеют естественным языком. Поэтому наши знания о ПрО и процессах в них необходимо адаптировать под язык машин.
Стоящая задача по имитации деятельности проектанта предполагает не только описание самих проектных операций и выполняемых процедур, но и перевод их на формальный язык действий. Так, начальная фаза любого предпроектного исследования предполагает изучение с одной стороны прошлого опыта, свойств и параметров уже созданных артефактов; с другой стороны, важно оценить каковы же результаты новых исследований в различных областях, которые могут оказать влияние на параметры будущего проекта.
В концептуальном проектировании самолета такие исследования проводятся на основе изучения трендов, построения статистических моделей. Для формализации этого процесса создаётся и актуализируется база данных по самолётам, двигателям, аэродинамическим профилям, авионики и проч. Определяются на основе опыта наиболее востребованные и влияющие зависимости искомых параметров, которые «помогают» проектанту в оценке и принятии решений. Все эти действия описываются, протоколируются и в дальнейшем формализуются.
До недавнего времени трудно формализуемые задачи, например, как автоматическое построение на геометрической модели сетки конечных элементов, в большей степени уже подвластны создаваемым программным комплексам.
Добившись в ряде областей формализации знаний через выявленные законы, физические и эвристические закономерности, для дальнейшей трансляции знаний компьютеру на первый план встала задача семантической согласованности данных.
2 Семантическое моделирование 2.1 Тезаурус предметной области
Тезаурус ППС используется в качестве семантической основы и интегратора всех компонент разрабатываемой информационной системы (ИС) «Робот-проектант» (РП). Создание тезауруса, как разновидности онтологии, начинается с выделения области и определения границ ПрО. Глобальной ПрО является самолетостроение, локальной – этап ППС [4]. Общая терминология ПрО ППС, включённая в тезаурус, основана на Авиационных правилах, учебниках и учебных пособиях, терминологических словарях, справочниках, энциклопедиях, научных публикациях и технических отчетах по ПрО ППС [5-10].
Онтология в виде тезауруса даёт в явном виде информацию, необходимую для понимания места термина в терминологической системе, представляет собой полное семантическое окружение каждого термина, связанного семантической сетью. Онтологический подход к изучению и исследованию ПрО даёт возможность просмотреть всю совокупность слов, которыми может быть описана искомая тема, при этом обозревая в явном виде интересующее его семантическое окружение. Терминологическая база и методы её расширения могут изменяться как во время создания, так и во время использования тезауруса, поэтому для определения информационных материалов о ПрО учитывается актуальность источников и сценарии использования онтологии. При создании тезауруса для ИС РП применялась следующая последовательность использования источников информации:
-
1) Авиационные правила, Единая система конструкторской документации,
терминологические ГОСТы;
-
2) профильные учебники, тематические словари и энциклопедии;
-
3) специализированные монографии, научные отчёты, статьи в научных журналах и трудах профильных конференций.
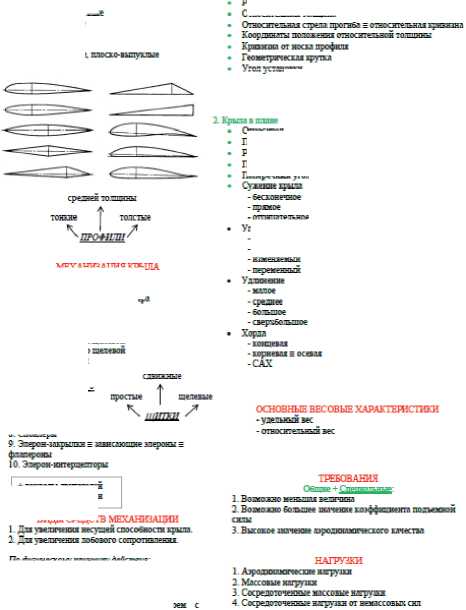
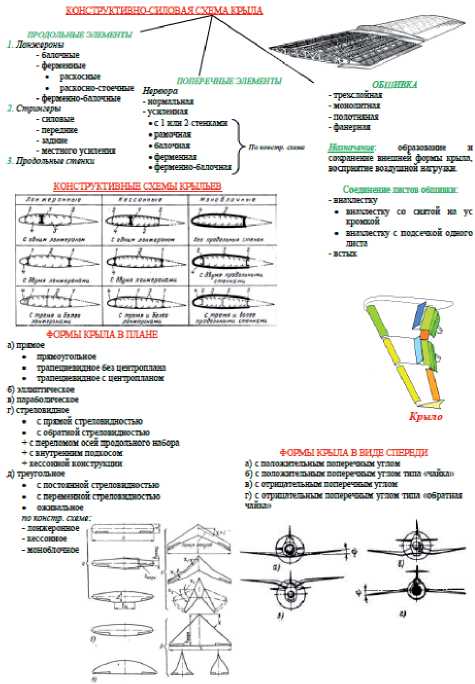
Исходной основой для описания агрегатов самолета, как части ПрО, являются обобщённые данные, которые формируются в привычном для инженера виде, например, как это представлено на рисунке 1.
6 S-образные
ГЕОМЕТИНЕСКИЕ ХАРАКТЕИКТ/КИ
Размер хорды
Огносите.тьнал 70ЛД1НЕ!
ТИПОВЫЕ ПРОФИЛИ КРЫЛА
1 Дюяко-ньптуклые
2 Носовой литок = Ejrок Крюгерг
- р рдк IWBHUH
• оттлонвемый
5 Тормозные пита
6 Элероны
' Изтериепторы
8 Спойлеры
4 Закрылок
• джухшелевон
Угол установки
ВИДЫ СРЕДСТВ МЕХАНИЗАЦИИ
По фызичегхам} гриапуг, Otic wue
Ди утр-*» т енил пограничник споем
Рисунок 1 – Пример описания параметров крыла самолёта в удобном для инженера виде1
- Е»СИХХ»^)ЕЧНЫе
-
2 Чечезипесёрозные
-
3 Ромбовидные
-
4 ЗСзооиндные
Относительна! птагта лк крыта
Полуразмах крыла
Поперечный угол крыла = угол поперечного V крыла
• отрюдтельмое гол стреловидности
МЕХАНИЗАЦИЯ КЖГА ". Предкрылок
- изменкемый
- пждолы двигателей
Фрагмент формализованного описания этой части ПрО, касающийся крыла самолёта, в онтологическом редакторе «Protégé», представлен на рисунке 2. Использование тезауруса позволяет не только получить наиболее полное описание характеристик исследуемого объекта – самолёта, но и семантически увязать все проектные операции и процедуры с базами данных и знаний в исследуемой ПрО. Практическая реализация семантической увязки параметров между программными модулями в РП осуществляется с помощью созданных таблиц в MS Excel. Пример фрагмента такой таблицы представлен на рисунке 3.
1 При подготовке исходной информации для тезауруса ПрО целесообразно включать не только устойчивые, общепринятые термины, но и устаревшие и жаргонные. Например, «главная нога» шасси.
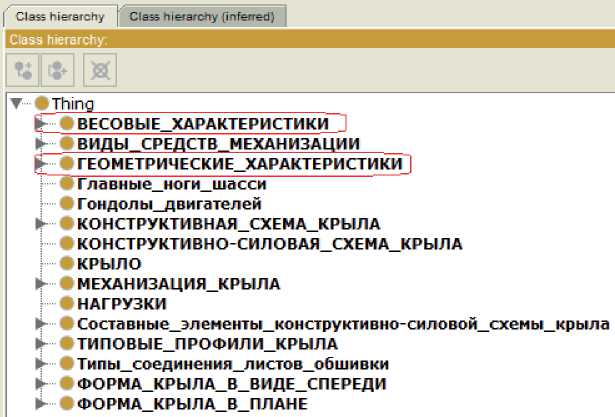
Рисунок 2 – Фрагмент тезауруса ПрО ППС, описывающего крыло самолёта
|
107 |
• Тип ПрофИЛЯ |
5 |
|
ЮБ |
• s-образный |
|
|
109 |
• Выпукло-вогнутый |
|
|
110 |
• Двоя ко-вы пулы й |
7 |
|
111 |
а Двоя ко-вы пулы й симметричны й |
8 |
|
112 |
- Двояко-выпулый несимметричный |
9 |
|
113 |
• клиновидный |
|
|
114 |
■ Ламинарный |
10 |
|
115 |
• плоско-выпуклый |
11 |
|
116 |
■ Ромбовидный |
12 |
|
117 |
• суперкритический |
13 |
|
11В |
• Чечевицеобразный |
|
|
119 |
® Форма в виде спереди |
14 |
|
120 |
а с отрицательным поперечным углом |
15 |
|
121 |
а с положительным поперечны м углом |
16 |
|
122 |
• Типа 'обратная чайка' |
— |
|
17 |
||
|
123 |
уТипа 'чайка* |
|
|
124 |
• Форма в плане |
18 |
|
123 |
- Готическое |
19 |
|
125 |
• параболическое |
20 |
|
127 |
• Прямое |
— |
|
12В |
- Прямоугольное |
21 |
|
129 |
• Трапециевидное без центроплана |
22 |
|
130 |
а Трапециевидное с центропланом |
23 |
|
131 |
• Стреловидное |
24 |
|
132 |
а С обратной стрез-оБидностью |
|
|
133 |
а с прямой стреловидностью |
25 |
|
134 |
■ Треугольное |
26 |
|
135 |
а С постоянной стреловидностью |
27 |
|
135 |
а с переменной стреловидностью |
— |
|
2S |
||
|
137 |
• Оживальное |
|
|
13В |
• Эллиптическое |
29 |
- Геометрические параметры крыла в плане
+ Относительная площадь
+ Площадь я Полуразмах
ЯПоперечный угол
Я Размах
= Сужение яБесконечное я Отрицательное я Прямое
- Угол стреловидности
±Изменяемый
Я Малый ffi Нулевой яПеременный
-Удлинение я Большое я Малое я Сверхбольшое
ЯСреднее
=| Хорда яконцевая я Корневая я Осевая
±САХ
Рисунок 3 – Фрагмент сводной таблицы геометрических параметров и характеристик крыла
-
2.2 Базы данных и знаний прошлого опыта
Базы данных (БД), создаваемые для информационного обеспечения проектантов самолётов, плохо описываются реляционной моделью, но на практике в силу удобного инструментария используют именно такую структуру и соответствующие СУБД.
Статистика по выпущенным ранее самолётам позволяет получать зависимости параметров и характеристик от тех или иных интересующих проектанта факторов. Если в качестве фактора (аргумента) принять текущее время, то можно наглядно графически показывать динамику изменения параметров по годам выпуска прототипов. Обычно для получения прогноза достаточно интерполяцией ретроспективного ряда выявить основную тенденцию изменения параметра и экстраполяцией распространить эту тенденцию на перспективу. Важно выявить зависимости параметров не только от времени, но и от факторов, которые напрямую влияют на удовлетворение всех требований ТЗ и имеют физически обоснованную связь. В автоматическом режиме РП может принять решение о выборе значения параметра, например стреловидность крыла, по следующим сценариям, ориентируясь на:
-
• тренд значений стреловидности крыла по годам;
-
• физическую зависимость выбранного параметра от других параметров и характеристик самолёта;
-
• значение параметра выбранного прототипа [10].
РП позволяет пользователю самому выбирать значение параметра, используя те же стратегии, что и для автоматического режима.
В действующем прототипе РП реализована БД, работающая совместно с системами поиска и извлечения информации. К информации, хранящейся в базе знаний РП, предъявлялись следующие требования:
-
• достоверность конкретных и обобщённых терминов, имеющихся в БД;
-
• релевантность или семантическое соответствие информации, то есть не только оценка степени соответствия, но и степени практической применимости соответствующих данных;
-
• исключение противоречий, контроль правильной интерпретации терминов.
Использование тезауруса позволяет получить наиболее полное описание характеристик исследуемого объекта - самолёта и помочь в изучении данной ПрО в случае использования ИС в образовательных целях.
3 Сценарии проектирования
В качестве ПрО для РП выбрано ППС. С одной стороны, это сфера деятельности, которая всегда требовала творческих решений, с другой - она достаточно хорошо формализована. Результатом работы РП является модель самолёта. Стадия ППС включает разработку общей концепции проектируемого объекта, составление моделей элементов объекта, подготовку технико-экономического обоснования, формирование задания на проектирование.
Описание объекта включает его конструктивную схему, приближённые оценки массы, габаритных размеров и энергопотребления.
РП - это компьютер с периферийными устройствами, инструментарии, включающие в себя машинные языки описания, систему управления БД (СУБД), CAD-системы, редакторы онтологий и базу знаний, как совокупность тезауруса, БД, правил и процедур, со сценариями проектирования. Укрупнённая структурная схема РП представлена на рисунок 4.
РП может работать в автоматическом режиме или же в режиме интеллектуального помощника проектанта-человека, при этом степень участия человека в проектировании не является постоянной величиной и зависит от желания пользователя. Иными словами, для каждого пользователя предварительно или динамически в процессе работы создаётся сценарий общений, включающий в себя степень автоматизации процесса проектирования, выбор предпочтительных устройств ввода-вывода данных, необходимость выполнения тех или иных этапов проектирования. Таким образом, сценарий и сам вид интерфейса РП зависят от предпочтений конкретного пользователя.
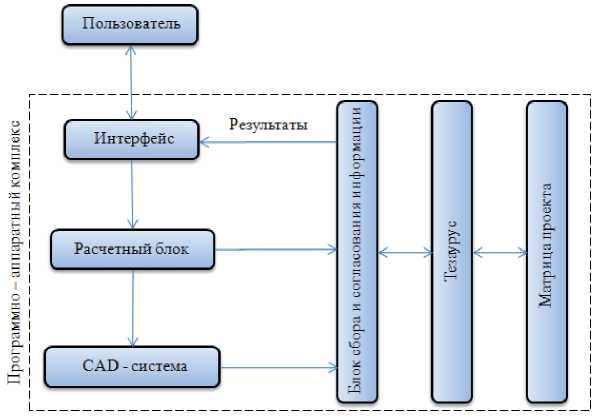
Рисунок 4 - Структурная схема робота-проектанта
Задача аналитического проектирования самолёта осуществляется на основе математической модели, которая характеризуется совокупностью внешних параметров (требований технического задания на проект самолета: параметры целевой нагрузки; потребная дальность полета; крейсерская скорость; класс аэродрома базирования и т. д.); и совокупностью внутренних параметров (параметры самолёта, определяемые в процессе решения задачи: взлётная масса, удельная нагрузка на крыло, стартовая тяговооружённость, аэродинамические характеристики, раз- меры самолёта и его агрегатов, со став и параметры оборудования и систем и т. д.), а так же целевой функцией (критерием или критериями эффективности), позволяющей выбрать среди альтернативных проектов наи- лучший.
Разрабатываемый РП в силу программно-аппаратных ограничений не способен самостоятельно синтезировать принципиально новые варианты конструктивно-силовой схемы, поэтому система использует те варианты схем конструкций, которые предварительно были в ней описаны.
РП позволяет провести анализ ряда вариантов схем и компоновок самолета и самостоятельно или, если требуется, на основе диалога с проектантом, выбрать вариант, наиболее полно отвечающий заданным техническим требованиям.
РП имеет модульную схему - отдельные подзадачи (например, определение удлинения крыла или его массы) решаются обособленными подпрограммами, выполнение которых инициируется роботом по заданной логике.
Совокупность используемых в решении конкретной задачи расчётных модулей формирует сценарий расчёта. Он зависит от типа решаемой задачи, степени вовлечённости человека в процесс работы робота-проектанта, а также от выбранного метода расчёта.
Вычисление параметров будущего самолёта производится отдельными расчётными модулями, которые получают необходимую информацию из матрицы проекта и возвращают в неё результат своей работы. Выполнение конкретного модуля инициируется при условии достаточности входных данных для этого модуля, при этом входом одних модулей может являться выход других. Выполнение независимых модулей может идти параллельно.
Сценарий проектирования воспроизводит последовательность действий проектанта, фактически является формализацией методики ППС, описанной в [10]. Фрагменты сценария взаимодействия пользователя с интеллектуальной системой, построенной на основе промышленной САПР, для ППС представлены в виде диаграммы на рисунке 5. На основе подробного описания всех действий проектанта разрабатывался интерфейс поддержки принятия решений РП самолёта и, в частности, схема увязки расчётных модулей и сценарный план проектирования.
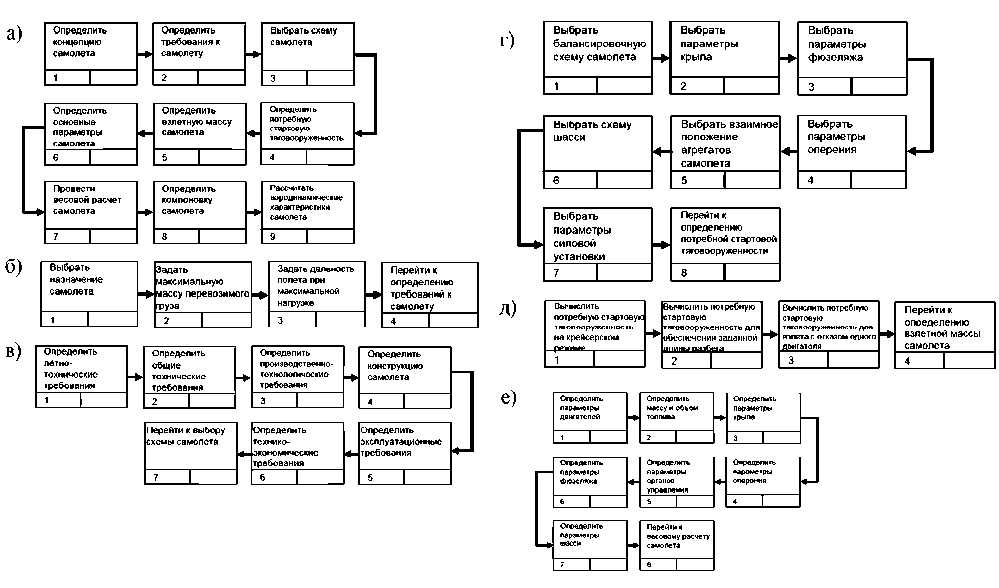
а - пример общего сценария; б, в, г - определение концепции самолёта;
д – определение тяговооружённости самолёта; е – определение основных параметров самолёта
Рисунок 5 – Фрагменты сценария взаимодействия пользователя с роботом-проектантом
4 Математическое моделирование
Математическая модель в разработанном программном комплексе РП основана на так называемой технологии быстрых расчетов [11-15]. Была использована схема исследования поведения объекта, состоящая из нескольких этапов.
На первом этапе строится модель изучаемого объекта в виде функциональной зависимости y = F ( x ), где переменная x описывает сам объект и задаёт условия его функционирования, а значение y - есть некоторая характеристика объекта при заданных условиях функционирования. Функция F является неизвестной. Как правило, существует некоторое количество измерений Ф = { y i = F ( x i ), i = 1, 2, ...} , полученных в результате натурных или вычислительных экспериментов. По известному множеству Φ с использованием математических методов анализа и обработки данных строится «суррогатная» модель - функция y = FS ( x ), значения которой принимаются в качестве приближённого значения характеристики y для объекта с описанием x .
Далее к построенной суррогатной модели применяются математические методы решения экстремальных и оптимизационных задач, которые требуют проведения расчётов с помощью функции y = FS(x) на множестве данных x, существенно превышающем множество имеющихся измерений. Если в задачах расчёта характеристик объектов в качестве входных данных ещё возможно использование детального описания геометрии объекта (например, в задачах аэродинамического проектирования самолета CFD-коды (Computational fluid dynamics) используют описания поверхности самолёта, получаемые из CAD-систем), то решение задач оптимизации функций, зависящих от тысяч аргументов, является весьма трудоёмким. В этих задачах размерность аргументов функций аппроксимации является существенным ограничи- вающим фактором. Поэтому одной из самых важных задач является задача снижения размерности описания объекта [11-14].
В настоящей работе в качестве целевой функции, а также в качестве функциональных ограничений, рассматриваются суррогатные модели или аппроксиматоры. Входными данными аппроксиматоров являются геометрическое описание самолёта и его основные лётнотехнические параметры. Геометрическое описание самолёта задаётся с использованием сравнительно небольшого числа интегральных геометрических характеристик - параметров модели, которые отражают наиболее существенные свойства самолёта и традиционно используются экспертами и инженерами на этапе предварительного проектирования. Такой подход существенно сокращает размерность описания объекта, обеспечивая при этом степень детальности, достаточную для предварительной оценки параметров и характеристик самолёта.
-
4.1 Геометрическая модель
В работе использован метод, позволяющий создавать геометрические модели самолета в автоматическом режиме при помощи технологии параметрического моделирования. Любой процесс проектирования как совокупность методов анализа и синтеза включает в себя набор правил и методов. Они могут быть обобщены и реализованы программными средствами в некую свёртку, условно называемую «параметрическим шаблоном». При использовании шаблонов проектировщику требуется лишь ввести входные данные. На выходе строятся целые конструкции по заложенным в шаблоне знаниям и алгоритмам решения задач. Шаблоны дают возможность однажды созданные алгоритмы применять повторно к другим построениям, получая при этом новый результат. Схема данного подхода представлена на рисунке 6. Все шаблоны разработаны с использованием языка Visual Basic Script (VBS) и внутреннего языка САПР CATIA.
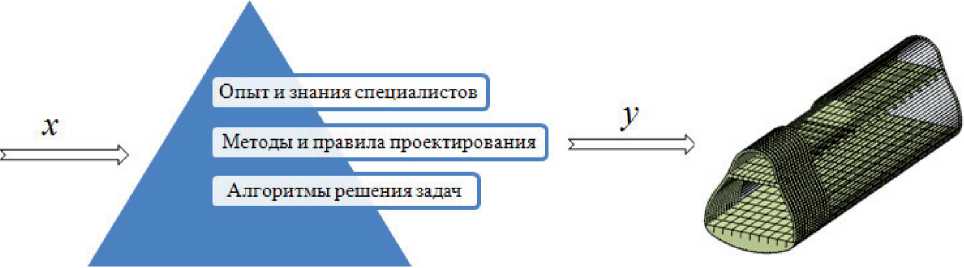
Рисунок 6 - Процесс проектирования при помощи параметрических шаблонов
Построенная геометрическая 3D модель самолёта, примеры которой представлены на рисунках 7 (внешние виды самолётов) и 8 (конструктивно-силовая и объёмная компоновка самолёта), может быть использована в качестве основы для последующего инженерного анализа в CAE–системах, а также для физических экспериментов на твёрдотельной модели, полученной на 3D–принтере (рисунок 9).


б)
-
а) -3D модель тяжёлого транспортного самолёта; б) - 3D модель лёгкого регионального самолёта Рисунок 7 - Примеры выполненных проектов самолетов в среде РП
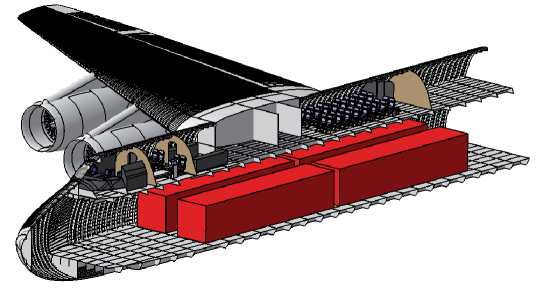
Рисунок 8 – 3D модель конструктивно-силовой и объёмной компоновки транспортного самолёта в препарированном виде (пример)

Рисунок 9 – Испытание твёрдотельной модели (масштаб 1:100) транспортного самолёта в аэродинамической трубе
-
4.2 Инженерный анализ
Анализ и оптимизация элементов конструкции самолёта реализуются в расчётном модуле РП. Расчёты ведутся по методу конечных элементов в интегрированном в среду РП программном комплексе [13]. Описание же геометрических параметров модели происходит в графическом модуле РП. Такой подход имеет очевидные ограничения, поскольку физическое описание модели основывается на конечно-элементной (КЭ) модели, в которой топологические отношения не могут быть изменены в процессе расчёта. Тем не менее, в практических задачах расчёта конструкций большинство физических свойств КЭ модели прямо или косвенно связаны с иерархической топологией геометрических элементов. Свойства компонентов хранятся в геометрической модели, а свойства КЭ наследуются непосредственно из сетки КЭ модели.
Процесс КЭ моделирования, анализа и оптимизации элементов конструкции самолета является итеративным. Схема процесса представлена на рисунке 10.
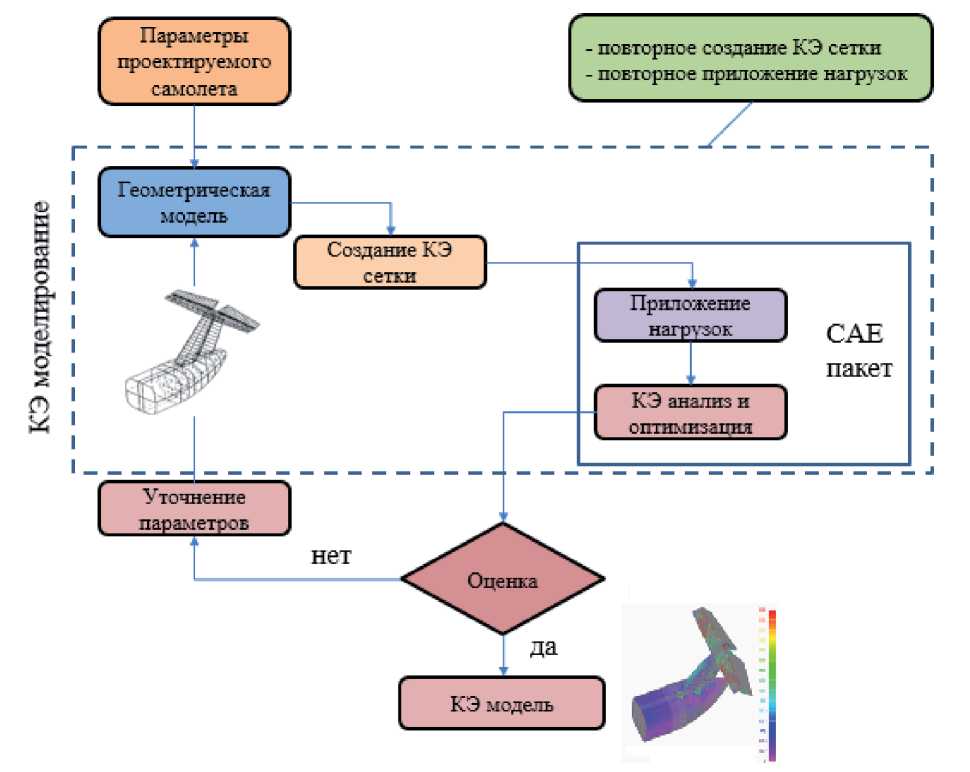
Рисунок 10 - Схема реализованного в РП процесса конечно-элементного моделирования
Таким образом, в соответствии с представленной схемой, при изменении геометрии происходит соответствующее обновление свойств КЭ модели.
При проектировании элементов конструкции крыла требуются параметрические шаблоны лонжеронов, нервюр, стрингеров и обшивок, опирающиеся на базовые плоскости крыла и скелетную модель. Скелетная модель является своеобразной основой модели крыла. Она яв- ляется частью многоуровневой абстракции геометрической модели, состоящей из плоскостей, точек, линий, сплайнов, поверхностей и множества других геометрических элементов в САПР CATIA. При создании скелетной модели используется методика параметрических шаблонов. САПР CATIA позволяет осуществлять полное геометрическое описание скелетной модели в автоматическом режиме. В процессе параметрического проектирования расположение новых или аналогичных частей может быть осуществлено путём изменения исходных данных и изменения параметров шаблона.
Геометрические характеристики конструкции крыла определяются с учётом элементов внутренней компоновки крыла, их пространственного расположения, габаритов, конструктивно-силовой схемой, расположением лонжеронов, нервюр, стрингеров и т. д. На рисунке 11 представлен пример скелетной параметрической модели крыла.
Для решения задачи автоматизации прочностного расчёта самолёта на основе параметризованной модели агрегатов самолёта необходимо установление параметрической ассоциативной связи между геометрической и КЭ моделями.
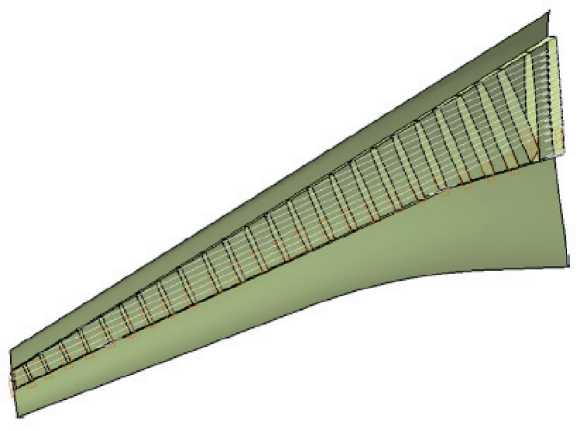
Рисунок 11 - Скелетная параметрическая модель крыла
При создании КЭ сетки на пересечении двух конструктивных элементов должно обеспечиваться правильное сочленение смежных участков поверхностей. Это является необходимым условием для того, чтобы гарантировать совпадение узлов конечных элементов, лежащих на линии пересечения, т.е. узлы конечных элементов от двух компонентов должны быть совпадающими.
Таким образом, для того, чтобы создать корректную КЭ модель, необходимо произвести дискретизацию геометрической модели.
Целью дискретизации являются топологические преобразования для создания общих ребер, точек и ли- ний скелетной модели. Для этого производится сегментация участков поверхностей на линиях их пересечения. Такие кривые называют граничными линиями поверхностей, разделяющими поверхности на небольшие участки, называемые геометрическими элементами сетки.
Применяемая в ИС РП КЭ модель включает в себя два типа элементов: одномерные и двумерные. Процесс генерации сетки происходит по схеме, описанной в работе [13]. Пример сгенерированной таким образом геометрической сетки представлен на рисунке 12.
Правила для определения свойств элементов конструкции крыла описываются следующим образом:
<свойства> :: = (... <типы элементов конструкции>, <типы элементов>, <свойства материала>, <физические свойства>);
<типы элементов конструкции> :: = (<пластина >, <стержневой элемент>, <оболочки>...);
<типы элементов> :: = (
-
<свойства материала> :: = (<алюминиевые сплавы>, <титановые сплавы>, <магниевые сплавы>, <легированные стали>, <композиционные материалы>...);
<физические свойства> :: = (<толщина>, < площадь поперечного сечения>, <координаты>...).
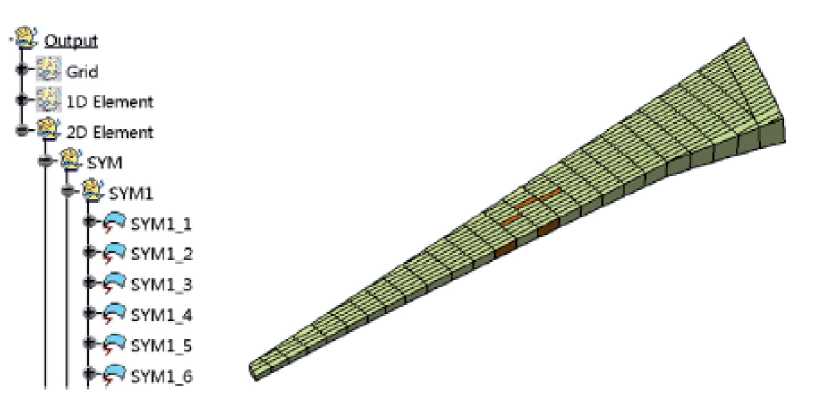
Рисунок 12 – Геометрическая сетка крыла
В соответствии с характером силовой работы элементов конструкции самолета, типы КЭ выбираются на основе следующих допущений. Пояса лонжеронов, пояса нервюр и стрингеры воспринимают осевые усилия, вызванные изгибающими моментами, представляются как стержневые одномерные элементы. Элементы конструкции, воспринимающие поперечные нагрузки, представляются двумерными элементами (пластины, мембраны).
На рисунке 13 представлен фрагмент КЭ модели с различными свойствами. Результат расчёта КЭ модели крыла представлен на рисунке 14.
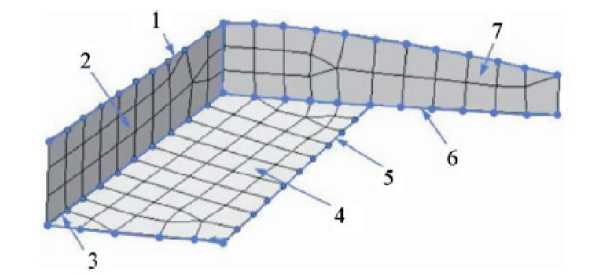
1 – стержневой элемент верхнего пояса лонжерона, 2 – элемент типа пластина стенки лонжерона, 3 – стержневой элемент нижнего пояса лонжерона, 4 – элемент типа пластина нижней обшивки, 5 – стержневой элемент стрингера, 6 – стержневой элемент нижнего пояса нервюры,
7 – элемент типа пластина стенки нервюры
Рисунок 13 – Фрагмент КЭ модели
На практике автоматизация выбора типа КЭ (пластина, стержень) осуществляется в зависимости от типов геометрических элементов (поверхность, кривая).
Для каждого конструктивного элемента должно создаваться, в зависимости от характера его силовой работы, индивидуальное свойство, и задача должна рассматриваться как оптимизационная, с возможностью использования динамично изменяющихся входных параметров.
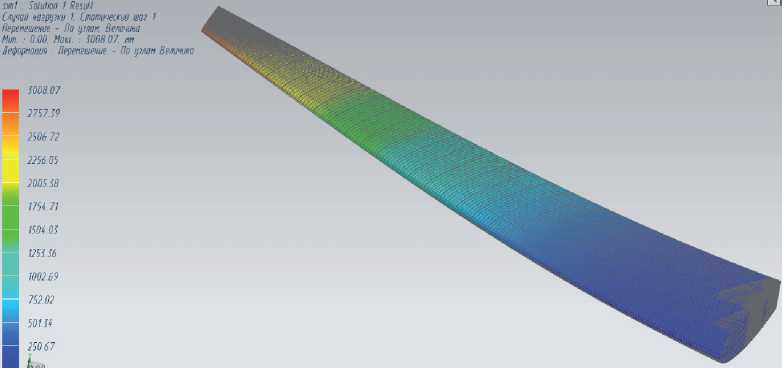
Рисунок 14 – Результат прочностного анализа КЭ модели крыла (деформация крыла от воздушной нагрузки)
В то же время оптимизация размеров и оптимизация формы представляют разные процессы. Оптимизация размеров ведётся средствами КЭ анализа. При этом обновляются лишь физические свойства КЭ модели, без изменения параметров геометрической модели. Задача оптимизации формы решается средствами геометрического моделирования САПР CATIA.
Геометрическая модель циклично обновляется после прохождения итераций оптимизации КЭ модели, и так происходит до тех пор, пока результаты оптимизации не будут удовлетворять выбранным критериям.
Информация о КЭ модели выводится отдельным файлом - информационным списком. Такой файл содержит сведения о типах конечных элементов, номерах элементов, номерах узлов, физических свойствах материалов.
-
4.3 Аэродинамическая оценка
Задача автоматизации аэродинамической оценки решается схожим образом с задачей автоматизации инженерного анализа. Для того, чтобы автоматизировать процессы, необходимые для выполнения аэродинамической оценки, написаны соответствующие макросы на языке программирования Visual Basic.
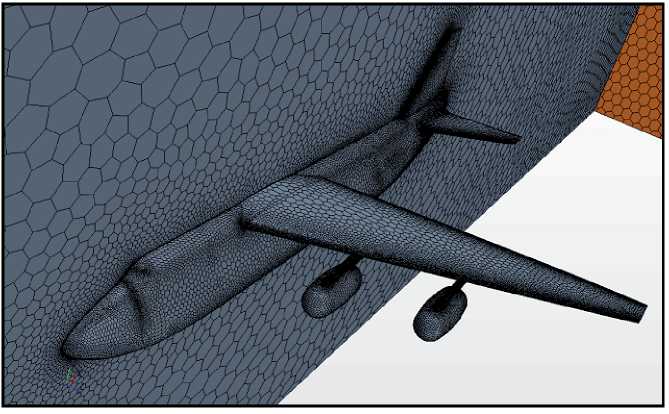
Рисунок 15 - Модель самолёта в расчётной области
Структурная сетка, используемая при расчёте, создаётся при помощи программы ANSYSTM ICEM CFD при помощи макроса. Макрос загружает файл исходной геометрии, созданной ранее в САПР CATIA, и ранее сгенерированная сетка автоматически экспортируется в CFD-решатель, используемый для выполнения аэродинамических расчётов.
На рисунке 15 представлена модель самолёта в расчётной области. Сетка моделируется с различными уровнями плотности (один уровень -в области следа от тела модели, другой - вокруг самого тела модели).
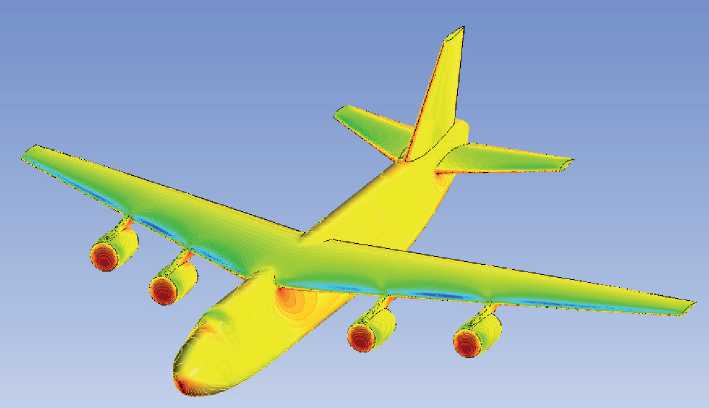
Рисунок 16 – Пример демонстрации распределение давления на внешней поверхности транспортного самолёта
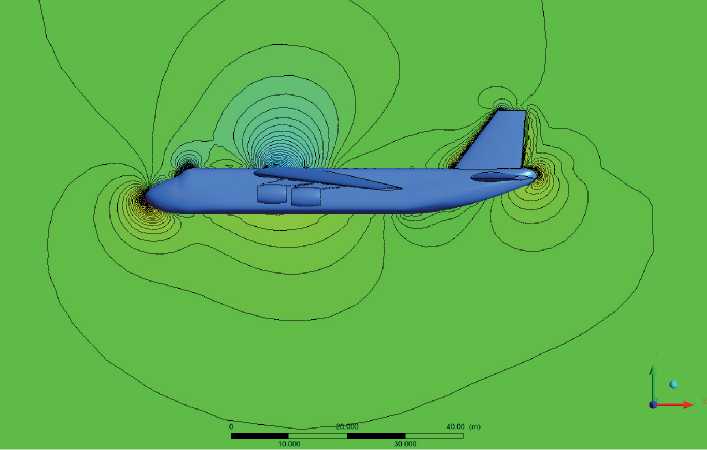
Рисунок 17 – Пример распределение давления в плоскости симметрии транспортного самолёта
В связи с нетриви-альностью задачи комплексной численной оценки аэродинамических характеристик всего самолёта и ограниченным вычислительными мощностями первого демонстрационного прототипа РП принято решение временно ограничиться двумерной задачей обтекания профиля крыла в районе средней аэродинамической хорды (САХ).
Задача моделирования турбулентных течений решается с использованием уравнений На-вье-Стокса при помощи метода конечных объёмов.
На рисунках 16 и 17 приведены примеры результатов аэродинамических расчётов транспортного самолёта на дозвуковых скоростях полёта. В частности, показано распределение воздушного давление внешние поверхности самолёта. Результаты таких расчётов позволяют торые в сочетании с другими видами нагрузок необходимы анализа и проведения проектных прочностных исследований.
определить значения аэродинамической нагрузки на конструкцию, ко-для проведения инженерного
В процессе аэродинамического расчёта определяются значения коэффициентов подъёмной силы C ya , аэродинамического сопротивления C xa и давления C p на разных углах атаки и при разных числах Маха. Далее эти результаты передаются в матрицу проекта для сравнения и корреляции результатов расчётов, выполняемых другими методами в расчётном блоке РП
[5, 16].
5 Интерфейс интеллектуального помощника проектанта
Пользовательский интерфейс ИС РП должен содержать необходимые инструменты и типы модели, подходящие под задачи пользователя. Из всего спектра возможных методов, применимых для моделирования изделия в рамках CAD системы, наиболее перспективным представляется онтологический подход, в рамках которого становится возможным обеспечение семантической наследуемости модулей интерфейса в рамках единой онтологической модели жизненного цикла изделия.
Взаимодействие пользователя с ИС в её интерфейсе описывается средствами сценария, в котором фиксируется форма диалога, регламентирующая последовательность транзакций и вид обмена сообщения между РП и пользователем. В зависимости от используемых средств, сценарий может быть представлен в виде графа переходов конечного автомата, либо в виде совокупности фреймов. Совокупность сценариев диалога (как статических, так и динамических) хранится в соответствующих библиотеках и представляет собой модель общения, реализуемую пользовательским интерфейсом ИС.
Интерфейс ИС рассматривается как инструмент, который способен осуществлять поддержку таких действий, как проектирование, разработка, отображение и изменение объектов в графически-ориентированной среде.
-
5.1 Экранные формы интерфейса «Робота-проектанта»
Интерфейс ИС РП (рисунок 18) состоит из нескольких основных экранов: сценарного плана проектирования («таймлайн»), интерактивного экрана изменения проектных параметров, матрицы проекта и окна предварительного просмотра модели.
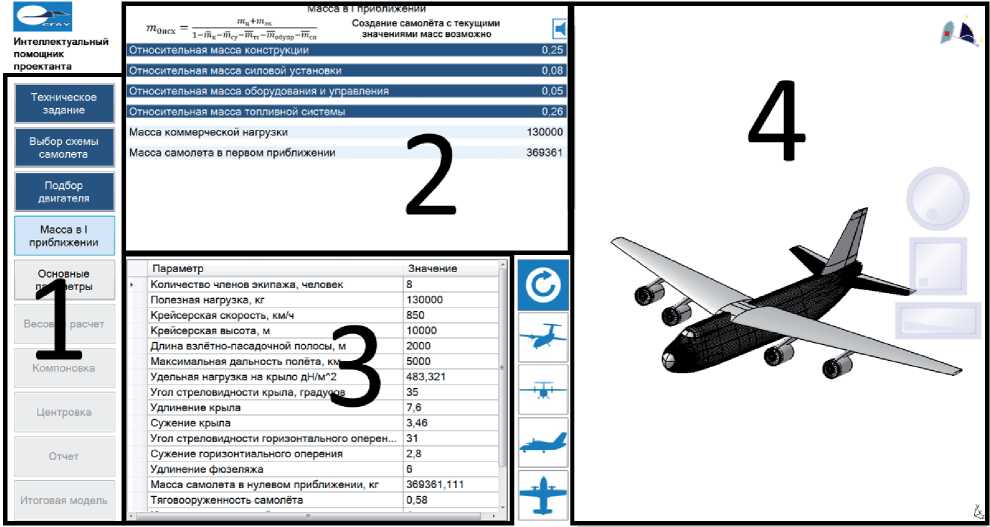
1 - сценарный план проектирования; 2 -интерактивный экран изменения проектных параметров;
3 - матрица проекта; 4 - окна предварительного просмотра модели
Рисунок 18- Внешний вид интерфейса ИС РП
Таймлайн служит для описания процесса проектирования самолёта. Каждый пункт таймлайна представляет отдельный вычислительный модуль, отвечающий за выполнение некоторого набора проектных процедур.
Интерактивный экран изменения проектных параметров содержит модули, отвечающие за ввод или коррекцию проектных параметров проекта.
Матрица проекта служит для демонстрации пользователю сводной информации по ключевым проектным переменным проекта. Изменяя проектные параметры на текущем этапе сценария, пользователь может в реальном времени контролировать влияние внесённых изменений на результат расчёта: в табличной форме в матрице проекта и визуально, на экране предварительного просмотра модели.
-
5.2 Концепция управления CAD-системой с использованием клиент-серверного приложения
В качестве примера применения технологии удалённого доступа рассмотрено удалённое управление параметризованной моделью транспортного самолета, созданной в CAD CATIA, при помощи мобильного устройства на базе ОС Windows. Удалённо варьируя проектные параметры самолёта, описанные в матрице проекта, пользователь получает возможность осуществлять перестроение трёхмерной геометрической модели без необходимости непосредственного взаимодействия с CAD системой.
Экран клиентского приложения на начальном этапе проработки состоит из массива названий полей и полей ввода значения. Серверная часть приложения получает запрос от клиента, обрабатывает его, связывается с БД и отправляет обратно ответ клиенту. В качестве БД использована база проектных параметров тяжелого транспортного самолета, интегрированная в РП [1]. БД выполнена в системе MS Excel и связана с параметризованной моделью. Сохранение БД запускает регенерацию модели по актуализированным данным, включая выбор и расчёт проектных параметров, не определённых пользователем на этапе ввода данных.
Для написания серверной части приложения был выбран объектно-ориентированный язык C#. В БД хранятся как редко изменяемые данные (архивы, справочные данные, типовые проектные решения), так и сведения о текущем состоянии различных версий выполняемых проектов. Как правило, БД работает в многопользовательском режиме, с её помощью осуществляется информационный интерфейс (взаимодействие) различных подсистем САПР.
Удалённый доступ к интерфейсу системы реализуется с целью упрощения взаимодействия пользователя с системой проектирования, повышения доступности благодаря возможности доступа с мобильных устройств (планшетных компьютеров и телефонов).
6 Демонстрационный экземпляр
Для демонстрации результатов, полученных в процессе создания РП, был изготовлен демонстрационный экземпляр интерактивного макета автоматизированной системы проектирования летательных аппаратов на базе выставочного киоска с сенсорным управлением (рисунок 19). Работа демонстрационного образца сопровождается аудио и визуальными подсказками, которые позволяют взаимодействовать с системой пользователям, не являющимся специалистами в области авиастроения. Демонстрационный экземпляр предназначен для экспонирования на выставках и презентациях. В силу ограниченного количества времени, доступного в формате презентации, сценарии расчёта, заложенные в демонстрационный образец, рассчитаны на большую степень автоматизации, что, с одной стороны, позволяет сократить время, необходимое для создания проекта, а с другой – помочь пользователю, слабо знакомому с процессом проектирования самолёта, достичь результата.

Рисунок 19 - Внешний вид демонстрационного образца ИС «Робот-проектант»
Заключение
Результаты, полученные при создании прототипа РП в области ППС, демонстрируют реализуемость интеллектуальных помощников в области конструирования сложных технических артефактов. Представленный прототип позволяет пользователю, незнакомому с CAD-системами, успешно создавать трёхмерные модели самолёта и его агрегатов, а также их различные представления, в автоматическом режиме осуществляя комплекс действий, которым обычно занимается конструктор. Полученный результат позволяет надеяться на активное использование РП как интеллектуальных помощников в реальной практике проектирования.
Представленные результаты являются частью работ, выполняемых по теме: «Разработка новых концепций, методов и технологий проектирования, производства и эксплуатации агрегатов и систем перспективных авиационных комплексов» в рамках Программы повышения конкурентоспособности Самарского государственного аэрокосмического университета имени академика С.П. Королёва (национальный исследовательский университет) среди ведущих мировых научно-образовательных центров на 2013–2020 гг.
Список литературы Робот-проектант: на пути к реальности
- Боргест, Н.М. Робот-проектант: фантазии и реальность/Н.М. Боргест, А.А. Громов, А.А. Громов, Р.Х. Морено, М.Д. Коровин, Д.В. Шустова, С.А. Одинцова, Ю.Е. Князихина//Онтология проектирования. -2012. -№4(6). -c. 73-94.
- Horizon 2020 -The EU Framework Programme for Research and Innovation. -http://ec.europa.eu/programmes/horizon2020/what-horizon-2020.
- Lidwell, W. Universal Principles of Design, Revised and Updated: 125 Ways to Enhance Usability, Influence Perception, Increase Appeal, Make Better Design Decisions, and Teach through Design./Lidwell, W., Holden, K., Butler, J. -Rockport Publishers. 2010. -272 p.
- Авиационные правила. Часть 25. Нормы летной годности самолетов транспортной категории -Режим доступа: http://meganorm.ru/Index2/1/4293795/4293795750.htm.
- Егер, С.М. Проектирование самолётов/С.М. Егер, В.Ф. Мишин, Н.К. Лисейцеви др. -М.: Машиностроение, 1983.-616 с.
