Роботизация как метод повышения безопасности строительного производства

Автор: Шагина Екатерина Сергеевна
Журнал: Строительство уникальных зданий и сооружений @unistroy
Рубрика: Безопасность строительного производства
Статья в выпуске: 6 (21), 2014 года.
Бесплатный доступ
Строительство является одной из ведущих сфер экономической деятельности. С каждым днем увеличивается разнообразие выполняемых строительных проектов, возрастает сложность самого строительства. Строительные работы, как правило, отличаются повышенной сложностью и опасностью производства работ, а также монотонностью, что представляет особую трудность для рабочих. В то же время успешность любого строительного проекта определяется тремя показателями: стоимость, качество, сроки. Для повышения значений этих показателей необходимо совершенствование технологии и организации строительного производства на основе прогрессивных отечественных и зарубежных технологий. Одной из таких технологий является роботизация, которая позволяет ускорить процесс строительства, повысить качество и безопасность выполняемых работ, а также сократить долю ручного труда. В статье рассматривается повышение безопасности строительного производства путем внедрения роботов.
Строительство, автоматизация, роботизация, строительный робот, травматизм в строительстве, безопасность строительногопроизводства
Короткий адрес: https://sciup.org/14322126
IDR: 14322126 | УДК: 69
Robotics as a method of improving the safety construction production
Текст обзорной статьи Роботизация как метод повышения безопасности строительного производства
Актуальной проблемой в большинстве стран мира является производственный травматизм как следствие несчастных случаев и аварий. Охрана труда в строительстве – это взаимосвязь социальноэкономических, законодательных, технических, гигиенических и организационных мероприятий [13, 4446,57]. Основной её целью является ограждение здоровья строителей от несчастных случаев и профессиональных заболеваний, а так же обеспечение благоприятных условий труда для повышения производительности и качества выполняемых работ [13, 44-45, 46]. Сложность строительного производства, разнообразие технологических операций и особые условия их выполнения обусловливают низкий уровень комплексной механизации и автоматизации строительных процессов, что особенно резко проявляется в связи с необходимостью увеличения объема, повышения качества строительства и снижения его себестоимости.
Важную роль в строительной индустрии призвана сыграть роботизация отдельных видов операций. Анализ основных видов строительных работ показывает, что на современной стадии развития робототехники могут быть автоматизированы многие из них. Высвобождая рабочих, занятых физическим трудом и прежде всего на опасных, утомительных и неквалифицированных работах, промышленные роботы позволяют более рационально использовать трудовые ресурсы и дают не менее важный для нашего общества социальный эффект. Росту производительности труда также способствует повышение качества производства работ и снижение брака при выпуске строительных материалов и изделий вследствие устранения индивидуальных и субъективных факторов. Масштаб строительной отрасли, ее зависимость от ручного труда создают явный экономический потенциал для автоматизации и роботизации строительных процессов [1, 70, 74, 87].
Обзор литературы
С середины 80-х годов ХХ-го столетия задачи роботизации и автоматизации строительных работ становятся в центре внимания ученых и специалистов научно-исследовательских и строительных организаций. Среди них ведущую роль занимают ЦНИИОМТП, ВНИИстройдормаш, МИСИ, ЮРГТУ (НИИ), Слецжелезобетонстрой, Мюнхенский технологический университет. Решение проблемы автоматизации и роботизации строительных операций базируется на трудах ученых Макарова И.М., Фролова К.В., Попова Е.П., Юревича Е.И., Кулешова А.И., Локоты H.A., Ющенко A.C., Тимофеева A.B., Крутько П.Д., Медведева B.C., Подураева Ю.В., Зенкевич С.А., Лохина В.М., Бурдакова С.Ф., Корендясева А.И., Тугенгольда А.К., Жавнер В.Л., Каляева И.А., Петракова В.А. и др., внесших значительный вклад в становление и развитие современных теоретических основ робототехники. Существенный вклад в решение задач роботизации строительных операций внесли ученые Евдокимов В.А., Вильман O.A., Воробьев В.А., Паршин Д.Я., Загороднюк В.Т., Булгаков А.Г., Максимычев О.И., Френкель Г.Ю.,Ткачев С.М., Гудиков Г.Г., Бок Т. и др. Однако, несмотря на широкий спектр научных и проектных разработок в области строительной робототехники уровень автоматизации и роботизации строительных операций остается достаточно низким. Это связано с необходимостью систематизации выполненных исследований и разработок, проведения комплексных научно-исследовательских и опытно-конструкторских разработок [4-9, 29-49, 52,62-63] .
В 2004 году исследованием на тему «Роботизированный комплекс для монтажа крупнопанельных зданий» занимался Ткачев С.М. В диссертационной работе решена научно-техническая задача повышения эффективности и безопасности выполнения монтажных операций в крупнопанельном домостроении путем совершенствования технологии на основе использования роботов и автоматизации производства монтажных работ [52].
В 2006 году в диссертации на соискание ученой степени доктора технических наук на тему «Анализ и синтез робототехнических и мехатронных комплексов для крупнопанельного и монолитного строительства», Паршиным Д.Я. в результате выполненных теоретических и экспериментальных исследований решена научная проблема анализа и синтеза специализированных роботов, робототехнических и мехатронных комплексов для крупнопанельного и монолитного строительства. Решение этой проблемы имеет важное народнохозяйственное значение, поскольку способствует разработке высокоэффективных средств комплексной механизации и автоматизации строительных операций, повышающих производительность и качество выполнение монтажных, отделочных и штукатурных работ, снижающих их трудоемкость, освобождающих людей от вредных и опасных условий работы [40].
Цель исследования
Цель: Исследование возможности повышения безопасности строительного производства путем внедрения роботов.
Задачи :
-
1. Изучение статистики производственного травматизма в строительстве
-
2. Выявление функциональных возможностей и особенностей современных строительных роботов
-
3. Формулирование основных задач роботизации технологических процессов в строительстве
Анализ производственного травматизма в строительстве
Строительство по условиям труда относится к потенциально опасным отраслям производства. Временный характер рабочих мест, необходимость выполнения значительных объемов работ на высоте, в сложных климатических условиях, в условиях действующего производства приводят к появлению большого числа опасных и вредных факторов, представляющих потенциальную угрозу для жизни и здоровья работающих и окружающих лиц, что вызывает необходимость повышенного внимания к вопросам охраны труда [2, 3, 15].
Согласно анализу аварий в процессе строительства зданий и сооружений, произошедших в последнее время, проведенному Департаментом мониторинга и взаимодействия с органами государственной власти Национального Объединения Строителей НОСТРОЙ [43] показал, что аварийность и травматизм в строительстве, как и число погибших при этом, растет с каждым годом (таблицы 1 и 2).
Таблица 1. Сравнительный анализ аварийности и травматизма в строительстве по годам наблюдения [43]
|
Период |
Аварийность |
Травматизм |
|||||
|
всего |
происш. |
аварий |
всего |
погибло |
травма |
||
|
2010 год |
всего |
96 |
40 |
56 |
127 |
56 |
71 |
|
ежемес. |
19,2 |
8 |
11,2 |
25 |
11 |
14 |
|
|
2011 год |
всего |
187 |
103 |
84 |
264 |
135 |
129 |
|
ежемес. |
15,6 |
8,6 |
7 |
22 |
11 |
11 |
|
|
2012 год |
всего |
257 |
130 |
127 |
325 |
169 |
156 |
|
ежемес. |
30 |
14 |
16 |
45 |
22 |
23 |
|
Таблица 2. Статистика гибели и травматизма на строительных объектах в 2013 году (по состоянию на 30 ноября 2013 года) [43]
|
№ п/п |
Виды аварий |
Всего пострадало |
|||||||||||
|
в 2013 году |
За последний полный месяц наблюдения |
||||||||||||
|
Строители |
3-и лица |
Строители |
3-и лица |
||||||||||
|
погибло |
травмир. |
всего |
погибло |
травмир. |
всего |
погибло |
травмир. |
всего |
погибло |
травмир. |
всего |
||
|
1 |
Аварии с механизмами |
32 |
25 |
57 |
0 |
0 |
0 |
6 |
5 |
11 |
0 |
0 |
0 |
|
2 |
Пожар |
32 |
19 |
51 |
1 |
0 |
1 |
1 |
0 |
1 |
0 |
0 |
0 |
|
3 |
Обрушение конструкций |
30 |
33 |
63 |
5 |
4 |
9 |
7 |
6 |
13 |
1 |
2 |
3 |
|
4 |
Обрушение строит. лесов |
3 |
19 |
22 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
|
5 |
Обрушение кровли |
2 |
13 |
15 |
1 |
1 |
2 |
0 |
5 |
5 |
0 |
0 |
0 |
|
6 |
Обрушение ограждений |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
|
7 |
Нарушение ТБ |
135 |
69 |
204 |
3 |
2 |
5 |
14 |
12 |
26 |
0 |
0 |
0 |
|
8 |
Взрыв оборудования |
6 |
19 |
25 |
0 |
0 |
0 |
1 |
0 |
1 |
0 |
0 |
0 |
|
9 |
Несчастный случай |
1 |
0 |
1 |
3 |
5 |
8 |
0 |
0 |
0 |
0 |
0 |
0 |
|
10 |
Обвал грунта |
39 |
14 |
53 |
2 |
1 |
3 |
4 |
1 |
5 |
1 |
0 |
1 |
|
11 |
Другие |
8 |
3 |
11 |
1 |
4 |
5 |
1 |
1 |
2 |
0 |
0 |
0 |
|
ИТОГО: |
288 |
214 |
502 |
16 |
17 |
33 |
34 |
30 |
64 |
2 |
2 |
4 |
|
Шагина Е.С. Роботизация как метод повышения безопасности строительного производства. /
Shagina E.S. Robotics as a method of improving the safety construction production. ©
Таблица 2. Продолжение
|
№п/п |
Виды аварий |
в 2012 году |
2013 к 2012 в % отношении по средемесячным показателям |
||||||||||
|
Строители |
3-и лица |
Строители |
3-и лица |
||||||||||
|
погибло |
травми р. |
всего |
погибло |
травми р. |
всего |
погибло |
травми р. |
всего |
погибло |
травмир . |
всего |
||
|
1 |
Аварии с механизмами |
48 |
48 |
96 |
2 |
2 |
4 |
80% |
63% |
71% |
0% |
0% |
0% |
|
2 |
Пожар |
14 |
6 |
20 |
0 |
0 |
0 |
274% |
380% |
306% |
|||
|
3 |
Обрушение конструкций |
42 |
50 |
92 |
3 |
17 |
20 |
86% |
79% |
82% |
200% |
28% |
54% |
|
4 |
Обрушение строит. лесов |
9 |
21 |
30 |
0 |
0 |
0 |
40% |
109% |
88% |
|||
|
5 |
Обрушение кровли |
0 |
0 |
0 |
0 |
0 |
0 |
||||||
|
6 |
Обрушение ограждений |
0 |
0 |
0 |
0 |
2 |
2 |
0% |
0% |
||||
|
7 |
Нарушение ТБ |
98 |
47 |
145 |
0 |
0 |
0 |
165% |
176% |
169% |
|||
|
8 |
Взрыв оборудования |
6 |
38 |
44 |
1 |
2 |
3 |
120% |
60% |
68% |
0% |
0% |
0% |
|
9 |
Несчастный случай |
1 |
0 |
1 |
4 |
5 |
9 |
120% |
120% |
90% |
120% |
107% |
|
|
10 |
Обвал грунта |
17 |
4 |
21 |
1 |
0 |
1 |
275% |
420% |
303% |
240% |
360% |
|
|
11 |
Другие |
16 |
4 |
20 |
1 |
0 |
1 |
60% |
90% |
66% |
120% |
600% |
|
|
ИТОГО: |
251 |
218 |
469 |
12 |
28 |
40 |
138% |
118% |
128% |
160% |
73% |
110% |
|
Шагина Е.С. Роботизация как метод повышения безопасности строительного производства. /
Shagina E.S. Robotics as a method of improving the safety construction production. ©
При этом нельзя признать полностью объективной эту статистику, поскольку не все предприятия участвуют в статотчетности.
При строительстве зданий и сооружений, находясь на самой строительной площадке, рабочие сталкиваются со следующими опасными факторами: наличие движущихся механизмов и машин, повышенный уровень шума, повышенный вибрационный уровень, возможность получения ожога при работе с горячими мастиками или паяльной лампой, опасность поражения электрическим током, физические перегрузки, наличие газоопасных и легковоспламеняющихся веществ, неустойчиво уложенные штабели складируемых изделий, повышенная или пониженная температура воздуха рабочей зоны в зависимости от времени года, опасность падения на скользких полах, подвижные части производственного оборудования, расположение рабочего места на значительной высоте относительно поверхности пола [12, 15, 18-20, 26-28] .
Анализируя данные реестра аварий, основными травмирующими факторами при производстве строительных работ следует считать: пожар, обвал грунта, обрушение строительных лесов, обрушения, падения предметов на человека, машины и механизмы.
К основные причинам производственного травматизма работников строительства относятся:
-
- отсутствие надзора за правильным и безопасным ведением работ;
-
- эксплуатация неисправного оборудования;
-
- грубое нарушение правил требований безопасности;
-
- нарушение технологических регламентов, отсутствие проектов организации строительства, проектов производства работ и другой документации или их некачественная разработка;
-
- работа в тяжелых климатических условиях;
-
- нарушение гигиенических норм (повышенным содержанием в воздухе рабочих зон вредных веществ; недостаточным или нерациональным освещением, повышенными уровнями шума, вибрацией, неблагоприятными метеорологическими условиями, наличием различных излучений выше допустимых значений);
-
- психофизиологический фактор (физические и нервно-психические перегрузки работающего) [48-50, 53-58].
Причина страшной тенденции травматизма кроется, прежде всего, в несоблюдении требований безопасности труда на строительном производстве. Пренебрежение нормами – субъективная причина, зависящая от многих факторов: физического и морального состояния работника, его ответственности, дисциплинированности, внимательности и пр. Одним из факторов снижения субъективизма может служить внедрение роботов и манипуляторов в технологию и организацию строительного производства [14,18].
Опыт применения строительных роботов
Ведущими странами по внедрению роботов в строительство являются Япония, США, Германия, что объясняется значительным увеличением объемов строительства и высоким уровнем социальных требований.
В связи с большой относительной стоимостью средств робототехники первоначальное применение средства роботизации стали находить на специфических дорогостоящих работах: подводное строительство, устройство тоннелей, спецсооружений [64-65, 71,77, 88, 90-91, 96].
Многие фирмы, например, «Фаун» (Германия), «Поклайн»(Франция) оснащают серийные экскаваторы манипуляторным оборудованием.
Для выполнения монтажных, погрузочно-разгрузочных и других работ с массой объекта манипулирования в пределах 100-600кг за рубежом создаются манипуляторы на базе погрузчиков, особенно малогабаритных [66, 68, 72, 78, 80].
Construction of Unique Buildings and Structures, 2014, №6 (21)
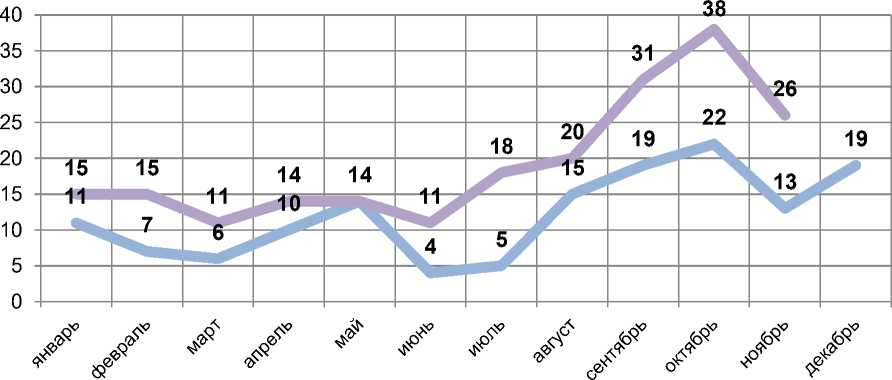
2012 2013
Рисунок 3. Количество пострадавших при нарушении требований безопасности
Из зарубежных фирм, специализирующихся на разработке и внедрении средств роботизации в строительстве, так же можно отметить следующие: «Тойн» (Финляндия), «Мук» (Швейцария), «Брок» (Швеция), «Лоудалл» (Англия) и др. Роботы фирм «Тойн» и «Мук» используются на земляных работах, «Лоудалл» - на погрузочно-разгрузочных работах, «Брок» - на реконструкции. Шведские фирмы «Атлас Копко» и «Брок» стали изготавливать робот для укладки бетона при ремонте дорог [11, 47, 82, 84, 87, 89].
Основной причиной непопулярности подобных технологий в России является то, что стоимость жилья у нас не зависит от себестоимости рабочей силы. Внедрение роботов не решит проблемы роста цен на жилье. Иными словами, в российском строительстве выгоднее использовать труд гастарбайтеров, которые получают гораздо меньшую оплату по сравнению с американскими рабочими [11]. Тем не менее, сегодня некоторые передовые производственные предприятия начинают задумываться о применении технологических роботов. Факторами, сдерживающими применение промышленных роботов в России являются:
-
- отсутствие у российских предприятий не только собственного опыта применения роботов, но даже общего представления о технических и экономических основах роботизированных технологий;
-
- отсутствие у российских предприятий квалифицированных кадров, способных обеспечить эксплуатацию роботов;
-
- отсутствие в России специалистов способных выполнить проектирование роботизированных ячеек и линий, внедрение роботов и технологическую подготовку роботизированного производства.
С решения этих ключевых проблем и следует начинать внедрение и освоение робототехники на строительном производстве.
Обзор современных строительных роботов и их особенностей
На рынке строительной техники в России, появился новый вид машин – строительные роботы. По прогнозам специалистов, уже в скором будущем дистанционно управляемая и автоматическая техника займет место обычной строительной техники [11,24, 42, 73].
Малые габариты и весовые характеристики подобной техники делают удобной и ее транспортировку. Роботом при помощи пульта может управлять всего один квалифицированный оператор. Поэтому подобная технология уместна в ситуациях, потенциально опасных для здоровья рабочих. Анализируя все многообразие строительных манипуляторов и роботов, представленных сейчас на рынке, в зависимости от назначения, технологической и структурной особенности можно разделить на несколько групп.
Первую группу составляют манипуляторы, роботы для выполнения монтажных работ. Средства роботизации этой группы характеризуются широким диапазоном грузоподъемности, мобильности, повышенной точностью позиционирования. В состав этой группы включаются манипуляторы и роботы для монтажа элементов зданий, перегородок, монтажа оборудования и строительных лесов [59, 71, 76].
Вторую группу образуют строительные манипуляторы и роботы для бетонных работ. Эта группа подразделяется на три подгруппы: манипуляторы и роботы для укладки и уплотнения бетонной смеси, средства роботизации арматурных работ на объекте, манипуляционное оборудование для монтажа и демонтажа строительных опалубок [6, 25, 59, 91].
Большую группу строительных манипуляторов и роботов составляют средства роботизации отделочных работ. В состав этой группы включаются манипуляторы и роботы для выполнения малярных, штукатурных, облицовочных работ, нанесения изоляционных мастик на кровли, а также для устройства монолитных полов. Эта группа отличается небольшой грузоподъемностью механизмов, мобильностью конструкций, использования программного управления и необходимостью сенсорных устройств [41, 60, 75, 92-93].
Четвертая группа — это манипуляторы и роботы для производства земляных работ. В эту группу входят многофункциональное манипуляционное оборудование, предназначенное для устройства котлованов, засыпки и уплотнения грунта, прокладки коммуникаций. Оборудование этой группы снабжается дистанционным, программным или комбинированным управлением [9, 61, 66].
В пятую группу входят манипуляторы и роботы для погрузочно-разгрузочных работ. В составе этой группы манипуляторы и роботы различной грузоподъемности для погрузки и разгрузки строительных конструкций и элементов, контейнеров и пакетов, а также мелкоштучных грузов. Такие манипуляторы могут устанавливаться на транспортных средствах, самоходных шасси [16, 67, 83].
На настоящий момент на рынке роботов представлено достаточное количество моделей, выполняющих множество операций при строительстве, реконструкции зданий и сооружений. Эти промышленные образцы способны заменить ручной труд на опасных утомительных работах.
Основные задачи роботизации технологических процессов
Используя отечественный и зарубежный опыт внедрения манипуляторов и промышленных роботов в стройиндустрии, анализируя технологические особенности производства в этой отрасли, а также учитывая большой опыт роботизации в промышленности, можно сформулировать следующие основные задачи роботизации технологических процессов на строительных предприятиях [69, 74, 79, 81, 85-86, 94]:
-
- разработка методик анализа технологии производства строительных изделий и материалов, проведение на их основе обследования предприятий и составление типовых комплексных научно обоснованных планов роботизации отдельных видов технологических процессов;
-
- определение приоритетных технологических операций и внедрение на них выпускаемых промышленностью манипуляторов и роботов;
-
- разработка специальных и специализированных манипуляторов, роботов для стройиндустрии;
-
- проведение работ по унификации и типизации средств робототехники для предприятий стройиндустрии;
-
- разработка технологической оснастки для роботизации производственных операций;
-
- проведение работ по совершенствованию технологических процессов и отдельных его операций с учетом требований автоматизации и роботизации для эффективного их внедрения;
-
- создание и внедрение роботизированных комплексов, участков и линий, разработка типовых компоновочных схем для различных производственных процессов;
-
- подготовка производств к внедрению гибких технологий и создание на их основе гибких производственных систем (линий, участков и цехов);
-
- решение технических и организационных вопросов эксплуатации средств робототехники на предприятиях отрасли.
Заключение
Как показал анализ данных реестра аварий, проводимого Департаментом мониторинга и взаимодействия с органами государственной власти Национального объединения строителей НОСТРОЙ, основной причиной травматизма в строительстве является субъективный фактор [43]. Несоблюдение безопасности труда в строительстве, постоянная подверженность рабочих на стройке опасности ведет к повышению несчастных случаев. В свою очередь изучение рынка строительных роботов зарубежных стран показал, что ручной труд можно роботизировать. Уникальное сочетание компактности и мощности роботов находит свое применение в наиболее тяжелых условиях и труднодоступных местах на стройплощадке, при этом, роботизация даёт значительное сокращение сроков строительства. Не секрет, что появление на свет подобной техники связано, прежде всего, с желанием строителей сократить сроки работ и повысить прибыль. Повышается и безопасность работ. Стоит отметить и такое преимущество роботов и манипуляторов, как бесшумность, экологичность. Поэтому подобная технология весьма уместна в ситуациях, потенциально опасных для здоровья рабочего персонала. Что касается экономической стороны вопроса, то на сегодняшний день в России гораздо выгоднее использовать ручной труд, поскольку стоимость рабочей силы невелика. А с другой стороны, на разработку такой технологии требуется выделение внушительных средств, и это при отсутствии гарантий, что результат может их не оправдать [12, 21,51].
В связи с этим необходимы исследования по разработке и внедрению более совершенных методов и средств предупреждения травматизма в строительстве, особенно при выполнении работ с повышенными требованиями безопасности.
Список литературы Роботизация как метод повышения безопасности строительного производства
- Автоматизации производственных процессов -важнейшая составляющая промышленного производства//Автоматизация в промышленности. 2013. №5. С. 63-65.
- Белякова О.В., Шкрабак Р.В. Безопасность использования подъемно-транспортных механизмов в строительстве и пути ее повышения//Известия Самарской государственной сельскохозяйственной академии. 2012. № 3. С. 126-131.
- Большеротов А.Л. Система и средства управления комплексной безопасностью строительства//В сборнике: Интеграция, партнерство и инновации в строительной науке и образовании сборник трудов Международной научной конференции. 2011. С. 472-476.
- Булгаков А.Г., Бертрам Т., Горчаков В.В., Касаткин А.В. Разработка мобильного робота для технологических процессов в строительстве//Известия высших учебных заведений. Северо-Кавказский регион. Серия: Технические науки. 2011. № 6. С. 20-25.
- Булгаков А.Г., Воробьев В.А. Промышленные роботы. Кинематика, динамика, контроль и управление. Монография Москва, 2008.
- Булгаков А.Г., Паршин Д.Я., Короткий Д.А. Принципы построения информационно-измерительной системы автоматизированной скользящей опалубки на базе промышленной сети PROFEBUS//Изв. вузов. Электромеханика. 2006. № 1. С. 41-44.
- Булгаков А.Г., Рахим Ф.А. Адаптивное нейронечеткое оперативное управление манипуляционным роботом в неизвестной среде//Мехатроника, автоматизация, управление. 2007. № 12. С. 46.
- Булгаков А.Г., Саад Загхлюл С. Ал-Кхаиит Компенсация трения в сочленениях робота-манипулятора посредством системы регулирования на базе нейросети//Известия высших учебных заведений. Электромеханика. 2008. № 6. С. 36-42.
- Булгаков А.Г., Токмаков Г.Е. Мехатронная система для выполнения земляных работ на интеллектуальной строительной площадке//Известия Юго-Западного государственного университета. Серия: Техника и технологии. 2013. № 3. С. 088-100.
- Васьковский А. М. Строительные роботы: реальность и перспективы//Вестник Московского автомобильно-дорожного государственного технического университета (МАДИ). 2012. №2. С. 79а-83.
- Вильман Ю.А.,Степанов М.А. Дистанционно управляемые манипуляторы//Механизация строительства. № 1, 2006 г., С. 3-8
- Образование в сфере техники безопасности в строительстве/Гамаюнова О.С., Ершов В.В., Ильин А.А., Соколов Б.В.//Строительство уникальных зданий и сооружений. 2012. №5. С.31-35.
- ГОСТ 12.0.230-2007 Система стандартов безопасности труда. Системы управления охраной труда. Общие требования.
- Данилов Б.Б., Смоляницкий Б.Н. Методы повышения безопасности некоторых технологических процессов подземного строительства//Известия высших учебных заведений. Строительство. 2012. №4. С. 32-38
- Елин, А. Условия труда и производительность//Охрана труда и социальное страхование. 2008. № 5. С. 6-10.
- Жигалов К.Ю., Сюняев Ш.И. Модели движения строительной техники в процессах автоматизации строительства объектов//Актуальные инновационные исследования: наука и практика. 2013. № 3. С. 5.
- Зарипова В.М., Цырульников Е.С., Киселев А.А. «Интеллект» для развития навыков инженерного творчества//Alma mater (Вестник высшей школы).2012. № 1 (январь). С. 58-61.
- Качество и безопасность строительства: современные принципы технического регулирования и внедрения инноваций//БСТ: Бюллетень строительной техники. 2010. № 12. С. 14-19.
- Киселева А.А. Безопасность высотного строительства//Жилищное строительство. 2006. № 1. С. 6.
- Котельников В.С., Коновалов Н.Н., Шевченко В.П. Оптимизация регулирования и управления в сфере промышленной безопасности и безопасности в строительстве//Законы России: опыт, анализ, практика. 2009. № 9. С. 3-13.
- Кочерга Н.А., Попова М.В. Инновационные технологии будущего//В сборнике: моделирование производственных процессов и развитие информационных систем 2012. С. 67-69.
- Куликова Е.Ю. Концепция управления безопасностью в подземном строительстве//Горный информационно-аналитический бюллетень (научно-технический журнал). 2013. № 11. С. 105-109.
- Максимычев О.И., Остроух А.В. Синтез автоматической системы управления экскаватора, как роботизированного комплекса//Автоматизация и современные технологии 2005. №2.
- Минцаев М.Ш. Комплексная автоматизация процесса возведения монолитных промышленных сооружений (Доклад)//30-я Московская международная выставка «Образование и карьера XXI век». -Москва: Гостиный Двор, 2009.
- Минцаев, М.Ш. Технология монолитного домостроения с использованием несъемной опалубки и возможности ее автоматизации//Вестник МАДИ (ГТУ): вып. 2 (17). Москва: МАДИ. 2009. С. 38-40
- Михина Т.В., Паньков В.В. Краткий обзор динамики и структуры травматизма в российском строительстве//ОТ и ТБ в строительстве. 2009. №4. С.15-19.
- Онищенко В.Я. К вопросу о структуре и классификации рисков//Безопасность жизнедеятельности. 2004. № 9. С. 28-31.
- Орлов Г.П. Порядок аттестации рабочих мест еще не в полном порядке//Охрана труда и техника безопасности в строительстве. 2010. №3.
- Паршин Д.Я. Теоретические основы и практическое применение строительных роботов и мехатронных комплексов. Федеральное агентство по образованию, Гос. образовательное учреждение высш. проф. образования Ростовская-на-Дону гос. акад. с.-х машиностроения. Ростов-на-Дону, 2005. Сер. Строительная робототехника.
- Паршин Д.Я. Динамическое управление движением строительно-монтажных роботов//Изв. вузов. Северо-Кав. регион. Техн. науки. 2006. Приложение №4. С. 10-14.
- Паршин Д.Я. Математическое моделирование движения скользящей опалубки//Электротехника и автоматика в строительстве и на транспорте: Межвуз. сб. науч. ст. РГСУ. Ростов н/Д. 2005. Вып. XIV. С. 3-9
- Паршин Д.Я. Ткачев С.М. Математические алгоритмы управления отделочными и бетоноукладочными роботами//Изв. РГСУ. 2006. №10. С. 299-305.
- Паршин Д.Я., Барщенков А.А., Сморгунова М.В. Автоматическое управление бетоноукладчиком манипулятором//Новые технологии. 2012. № 3. С. 89-95.
- Паршин Д.Я., Булгакова И.Г., Техрани Н. Планирование траектории движения штукатурного робота на основе задания скоростей в опорных точках//Известия высших учебных заведений. Северо-Кавказский регион. Серия: Технические науки. 2005. № 1. С. 11-15.
- Паршин Д.Я., Огородний Д.Н., Шишова Р.Г. Интеграция систем управления строительных холдингов на основе нейросетевой координации//Новые технологии. 2012. № 3. С. 95-101.
- Паршин Д.Я., Цветкова O.JI. Динамические модели отделочных роботов. Математические методы в технике и технологиях -ММТТ-19: Сб. тр. XIX междунар. науч. конф. -Воронеж: Изд-во Воронеж, гос. технол. акад. 2006. Т. 10. С. 219-222.
- Паршин Д.Я., Цветкова О.Л. Динамическая модель штукатурного робота//Изв. РГСУ. 2006. №10. С. 305-308.
- Паршин Д.Я., Цветкова О.Л. Управление движением строительных роботов//Мехатроника, автоматизация, управление. 2007. № S12. С. 13-16.
- Паршин Д.Я., Цветкова О.Л., Степанов Ю.В. Робот для разравнивания штукатурного раствора. Патент на полезную модель RUS 68413 29.05.2007
- Паршин, Д.Я. Анализ и синтез робототехнических и мехатронных комплексов для крупнопанельного и монолитного строительства: дисс. …д-ра техн. наук:16.02.07/Дмитрий Яковлевич Паршин; Новочеркаский Политехнический Институт, 2006.-328с.
- Побегайлов О. А, Кравченко И. В., Кожуховский С. О. Мобильные роботы вертикального перемещения//Инженерный вестник дона. Т. 14. №4. 2010. С.85-95.
- Ковальчук А.К., Кулаков Д.Б., Семенов С.Е. Принципы построения программного обеспечения системы управления антропоморфным шагающим роботом//Автоматизация и современные технологии. 2007. № 2. С. 10-15.
- Реестр аварий, проводимый Департаментом мониторинга и взаимодействия с органами государственной власти Национального Объединения Строителей НОСТРОЙ http://www.nostroy.ru/sitePage.do?name=accidents (дата обращения 15.12.2013)
- СНиП 12-03-2001 Госстрой России Безопастность труда в строительстве часть 1 общие требования
- СНиП 12-04-2002 Госстрой России Безопастность труда в строительстве часть 2 строительное производство
- СП 12-133-2000 Безопасность труда в строительстве. Положение о порядке аттестации рабочих мест по условиям труда в строительстве и жилищно-коммунальном хозяйстве
- Степанов М.А., Хартенштейн К. Краны манипуляторы для строительно-монтажных работ//Подъемнотранспортное дело. 2012. №4. С. 2-5.
- Ступаков А.А. Организация, оборудование и безопасность высотных работ в строительстве и эксплуатации высотных зданий и сооружений//Механизация строительства. 2013. № 12 (834). С. 45-48.
- Сусов В.И. Обеспечение безопасности строительства объектов в стесненных условиях сложившейся городской застройки//Промышленное и гражданское строительство. 2004. № 3. С. 41-42.
- Теличенко В.И. Комплексная безопасность строительства//Вестник МГСУ. 2010. Т. 1. № 4. С. 10-17.
- Тимофеев А.Г. Экономические преимущества применения роботов и тенденции развития мировой экономики//Известия Российского экономического университета им. Г.В. Плеханова.2012. 5. C. 144-159.
- Ткачев, С.М. Роботизированный комплекс для монтажа крупнопанельных зданий: дисс. …к-т техн. наук:05.02.05/Сергей Михайлович Ткачев; Ростовская-на-Дону Государственная Академия Сельскохозяйственного Машиностроения,2004.-146с.
- Томаков М.В. Нормативно-правовая основа системы управления охраной труда и промышленной безопасностью организаций строительства//Известия Юго-Западного государственного университета. Серия: Техника и технологии. 2012. № 2-3. С. 248-252.
- Федорец А. Г. Научно-методические основы управления производственными рисками на рабочих местах//Безопасность в техносфере. 2007. №6. С. 18-27.
- Федорец А.Г. Вероятностно-статистические методы оценки профессиональных рисков//Безопасность в техносфере. 2007. №4. С. 4-12.
- Федорец А.Г. Управление рисками: от оценки травмобезопасности к оценке травмоопасности//Безопасность в техносфере. 2009. №2. С. 25-30.
- ФЗ РФ от 21.07.1997 г. №116-ФЗ «О промышленной безопасности опасных производственных объектов».
- Шубенко Л.В. Методика контроля и оценки рисков на предприятии//Справочник специалиста по охране труда. 2008. № 11. С. 28-38.
- Baeksuk C., Kyoungmo J., Myo-Taeg L. et. al. (2013). Robot-based construction automation: An application to steel beam assembly (Part I). Automation in Construction. 2013. Vol.32. Pp 46-61.
- Bechthold N., Kane A., Michalatos P. (2014). Robotic tile placement: Tools, techniques and feasibility. Automation in Construction. 2014. Vol. 39. Pp. 161-166.
- Bernard L. Th., Richardson P. (2009). Construction engineering robot kit: warfighter experiment. Intelligent Robots and Computer Vision XXVI: Algorithms and Techniques 2009. Pp. 72520J-11.
- Воск Т., Boulgakov A., Parshin D. (2005). Motion Planning of Construction Robots by Optimizing Its Speed//Proc. of the 22-th Intern. Symp. on Autom. and Robot, in Construe. ISARC-2005 (Sept. 2005, Ferrara, Italy). -Ferrara, 2005. Pp. 486-495.
- Воск Т., Boulgakov A., Parshin D. (2003). Motion planning of mounting robots with intelligent control//Proc. of the 20-th Intern. Symp. on Autom. and Robot, in Construe. ISARC-2003 (Sept. 21-24, 2003, Eindhoven, Netherlands). -Eindhoven, 2003. Pp. 127-130.
- Bolger A., Faulkner M., Stein D. et. al. (2010). Experiments in decentralized robot construction with tool delivery and assembly robots. IEEE/RSJ 2010 International Conference on Intelligent Robots and Systems, IROS 2010 -Conference Proceedings 23rd IEEE/RSJ 2010 International Conference on Intelligent Robots and Systems, IROS 2010. Taipei, 2010. Pp. 5085-5092.
- Bosschera P., Williams R.L. IIa, Brysonb L.S. et. al. (2007). Cable-suspended robotic contour crafting system. Automation and Robotics in Construction. 2007. Vol. 17. Issue 1. Pp. 45-55.
- Choi H., Hana C., Leeb K. et. al. (2005). Development of hybrid robot for construction works with pneumatic actuator. Automation in Construction. 2005. Vol. 14. Issue 4. Pp. 452-459.
- Chotiprayanakul P., Liu D.K., Dissanayake G. (2012). Human-robot-environment interaction interface for robotic grit-blasting of complex steel bridges. Automation in Construction. 2012. Vol. 27. Pp. 11-23.
- Chung J., Lee S.H., Yi B.-J. et. al. (2010). Implementation of a foldable 3-dof master device to a glass window panel fitting task. Automation in Construction. 2010. Vol. 19. Issue 7. Pp. 855-866.
- Ekvall S., Kragic D., Jensfelt P. (2007). Object detection and mapping for service robot tasks. Robotica. 2007. Vol. 25. Issue 2. Pp. 175-187.
- Esfahani E.T., Sundararajan V. Using brain-computer interfaces to detect human satisfaction in human-robot interaction. International Journal of Humanoid Robotics. 2011. Vol. 8. Issue 1. Pp. 87-101.
- Gila M., Kanga M., Leeb S. et. al. (2013). Installation of heavy duty glass using an intuitive manipulation device. Automation in Construction. Vol. 35. November 2013. Pp. 579-586.
- Lam C.-P., Chou C.-T., Chiang K.-H. et. al. (2011). Human-centered robot navigation-towards a harmoniously human-robot coexisting environment. IEEE Transactions on Robotics. 2011. Vol. 27. Issue 1. Pp. 99-112.
- Kahane B., Rosenfeld Y. (2004) Balancing human-and-robot integration in building tasks//Computer-Aided Civil and Infrastructure Engineering. 2004. Vol. 19. Issue 6. Pp. 393-410.
- Khoshnevis B. (2004) Automated construction by contour crafting-related robotics and information technologies. Automation in Construction. № 13. 2004. Pp. 5 -19.
- King N., Bechthold M., Kane A. et. al. (2014) Robotic tile placement: Tools, techniques and feasibility//Automation in Construction. 2014. Vol. 39. Pp. 161-166.
- Kyoungmo J., Baeksuk C., Daehie H. (2013) Robot-based construction automation: An application to steel beam assembly (Part II). Automation in Construction. 2013. Vol. 32. Pp. 62-79.
- Lee D., Kim J., Ku N. et. al. (2010) Self-traveling robotic system for autonomous abrasive blast cleaning in double-hulled structures of ships. Automation in Construction. 2010. Vol. 19. Issue 8. Pp. 1076-1086.
- Lytle A.M., Saidi K.S., Bostelman R.V. et. al. (2004). Adapting a teleoperated device for autonomous control using three-dimensional positioning sensors: experiences with the nist robocrane. Automation in Construction. 2004. Vol. 13. Issue 1. Pp. 101-118.
- Mioduser D., Levy S.T. (2010) Making sense by building sense: kindergarten children's construction and understanding of adaptive robot behaviors. International Journal of Computers for Mathematical Learning. 2010. Vol. 15. Issue 2. Pp. 99-127.
- Molfino R.M, Razzoli R.P., Zoppi M. (2008) Autonomous drilling robot for landslide monitoring and consolidation. Automation in Construction. 2008. Vol. 17. Issue 2. Pp. 111-121.
- Nehmzow U., Akanyeti O., Billings S.A. (2010). Towards modelling complex robot training tasks through system identification. Robotics and Autonomous Systems. 2010. Vol. 58. Issue 3. Pp. 265-275.
- Paula G., Kwokb N., Liu D. (2013) A novel surface segmentation approach for robotic manipulator-based maintenance operation planning. Automation in Construction. 2013. Vol. 29. Pp. 136-147.
- Sasaki T., Kawashima K. (2008) Remote control of backhoe at construction site with a pneumatic robot system. Automation in Construction. 2008. Vol. 17. Issue 8. Pp. 907-914.
- Schober T. (2010) Clibot -a rope climbing robot for building surface inspection. Bautechnik. 2010. Vol. 87. Issue 2. Pp. 81-85.
- Seoa J.W., Haasb C., Saidic K.(2007). Graphical modeling and simulation for design and control of a tele-operated clinker clearing robot. Automation in Construction. 2007. Vol. 16. Issue 1. Pp. 96-106.
- Teizer J., Allread B.S., Fullerton C.E. (2010). Autonomous pro-active real-time construction worker and equipment operator proximity safety alert system. Automation in Construction. 2010. Vol. 19. Issue 5. Pp. 630-640.
- Vähäa P., Kilpeläinena P., Järviluomaa M. et. al. (2013). Extending automation of building construction -Survey on potential sensor technologies and robotic applications. Automation in Construction. December 2013. Vol. 36. Pp. 168-178.
- Voronkov D.I., Rutkevich A.V., Shishkin G.V. et. al. (2012). Building communication channels for mobile robot control: the implementation experience. Automation and Remote Control. 2012. Vol. 73. Issue 3. Pp. 596-603.
- Wooa S., Hongb D., Leec W. et. al. (2008). A robotic system for road lane painting. Automation in Construction. 2008. Vol. 17. Issue 2. Pp. 122-129.
- Wu C., Wang L., Liu X. et. al. (2011). Dimension optimization of an orientation fine-tuning manipulator for segment assembly robots in shield tunneling machines. Automation in Construction. Vol. 20. Issue 4. July 2011. Pp. 353-359.
- Yu S., Jang J., Han C. (2007). Auto inspection system using a mobile robot for detecting concrete cracks in a tunnel. Automation in Construction. 2007. Vol. 16. Issue 3. Pp. 255-261.
- Yu S., Ryu B., Lim S. et. al. (2009). Feasibility verification of brick-laying robot using manipulation trajectory and the laying pattern optimization. Automation in Construction. 2009. Vol. 18. Issue 5. Pp. 644-655.
- Yu Y., Kwok N.M., Ha Q.P. (2011). Color tracking for multiple robot control using a system-on-programmable-chip. Automation in Construction. 2011. Vol. 20. Issue 6. Pp. 669-676.
- Yun S.-K., Rus D. (2010). Adaptation to robot failures and shape change in decentralized construction//В сборнике: Proceedings -IEEE International Conference on Robotics and Automation 2010 IEEE International Conference on Robotics and Automation, ICRA 2010. Сер. "2010 IEEE International Conference on Robotics and Automation, ICRA 2010" Anchorage, AK, 2010. Pp. 2451-2458.
- Zavadskas E. (2010). Automation and robotics in construction: International research and achievements. Automation in Construction. 2010. Vol. 19. Issue 3. Pp. 286-290.
- Zhu Z., German S., Brilakis I. (2010). Detection of large-scale concrete columns for automated bridge inspection. Automation in Construction. 2010. Vol. 19. Issue 8. Pp. 1047-1055.
