Robust Sliding Mode Fuzzy Control of a Car Suspension System

Author: Ayman A. Aly
Journal: International Journal of Information Technology and Computer Science(IJITCS) @ijitcs
Article in issue: 8 Vol. 5, 2013.
Free access
Different characteristics can be considered in a suspension system design like: ride comfort, body travel, road handling and suspension travel. No suspension system can optimize all these parameters together but a better tradeoff among these parameters can be achieved in active suspension system. Objective of this paper is to establish a robust control technique of the active suspension system for a quarter-car model. The paper describes also the model and controller used in the study and discusses the vehicle response results obtained from a range of road input simulations. A comparison of robust suspension sliding fuzzy control and passive control is shown using MATLAB simulations.
Vehicle Dynamics, Active Suspension System, Quarter-Car Model, Sliding Fuzzy Control
Short address: https://sciup.org/15011941
IDR: 15011941
Text of the scientific article Robust Sliding Mode Fuzzy Control of a Car Suspension System
Published Online July 2013 in MECS
The purpose of a car suspension is to adequately support the chassis, to maintain tire contact with the ground, and to manage the compromise between passenger comfort and vehicle road handling, which is important for the safety of the ride. Generally, there are three types of suspension systems, namely, passive, semi-active and active suspensions.
Passive suspensions can only achieve good ride comfort or good road holding since these two criteria conflict each other and necessitate different spring and damper characteristics. While semi-active suspense with their variable damping characteristics and low power consumption, on systems offer a considerable improvement [1-2].
A significant improvement can be achieved by using of an active suspension system, which supplies a higher power from an external source to generate suspension forces to achieve the desired performance. The force may be a function of several variables which can be measured or remotely sensed by various sensors, so the flexibility can be greatly increased.
With rapid advances in electronic technologies [3], the development of design techniques for the synthesis of active vehicle suspension systems has been an active area of research over the last two decades to achieve a better compromise during various driving conditions, [4-9].
Studies have been done based on Linear Gauss Quadratic regulator, such as references [10-12]. Linear Gauss Quadratic method has mature theory base and control algorithm, thus it is widely used in suspension control. It should be pointed out that the design and synthesis of active suspensions can be approached from many ways: Modal analysis, as in [13]; bond graph modeling methodologies, as in reference [14]; fuzzy logic, such as in [15], while each of these approaches can bring some useful perspectives, the present paper will focus on the applications of robust control techniques, and the following work will constitute the trends of the robust system structure and performance potentials.
The aim of this paper is to develop the control algorithms, which can achieve comfort and good handling quality without excessively degrading the body and axle working space.
This paper is organized as follows. In section II, the dynamics of a quarter-car suspension system is explained. Optimal control is designed in section III. Simulations are presented in section IV. At the end, the paper is concluded in section V.
-
II. A Quarter-Car Suspension System
A car suspension system is the mechanism that physically connects the body of the car to their wheels, in other word suspension system isolates the car body from road disturbances and inertial disturbances associated with cornering and braking or acceleration.
Figs. (1, 2) illustrates the quarter–car model of a passenger car that most commonly used for controller design studies of active suspensions [16]. The equations of motion for the car model in the state equation are represented by:
mbzb = fa - k1(zb - zw) - cs(zb - zw) (1)
mwzw = - fa + k1(zb - zw) - k2(zw - zr)
with the following specifications of the suspension system are given in Table 1:
Table 1: quarter car parameters
|
Parameters |
Symbols |
Quantities |
|
Body mass |
m b |
250 kg |
|
Wheel mass |
m w |
50 kg |
|
Stiffness of the body |
K 1 |
16 kN/m |
|
Stiffness of the wheel |
K 2 |
160 kN/m |
|
Stiffness of the damper |
C s |
1.5 kN.s/m |
To transform the motion equations of the quarter car model into a space state model, the following state variables are considered:
Then the motion equations of the quarter car model for the active suspension can be written in state space form as follows:
|
• x = |
A .x +B. f +F. z ar |
(3) |
||||||
|
with |
" 0 |
0 |
1 |
— 1 |
■ 0 " |
|||
|
A = |
0 k 1 — mb k 1 L m w |
0 0 k mw |
0 cs — mb cs ---- - mw |
c 1 s mb c s m w J |
■ , |
10 - 1 L - w J |
||
|
and |
" 0 " |
|||||||
|
F = |
||||||||
X = [ X„ X2, X3, X4]r (2)
where x 1 is body displacement= z b -z w , x 2 is wheel displacement =zw-zr, x3absolute velocity of the body =
-
7 Z ^
-
zb , and x 4 absolute velocity of the wheel = w .

where f a : control force, z r : road input displacement.
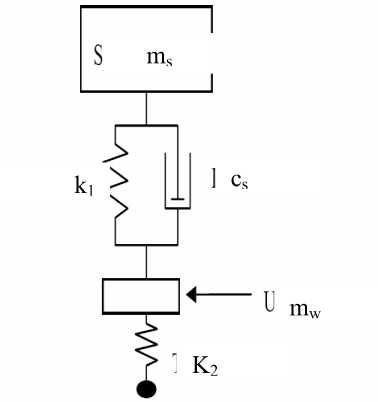
Fig. 2: 2 DOF model
-
III. Suspension Control Development
Fuzzy control systems are rule-based or knowledgebased systems, which have a set of fuzzy IF-THEN rules representing a control decision mechanism to adjust the certain effect coming from the system. Fuzzy controller have succeeded in many practical control problem that the conventional theories have difficulties to deal with. Therefore, the fuzzy control theory was used in this paper. Fig. 3 shows the rule table membership functions of the fuzzy controller.
Fig. 1: quarter car model
NB NS 2E PS PB
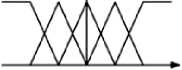
Input
NB NM NS 2E PS PM PB
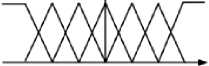
Output
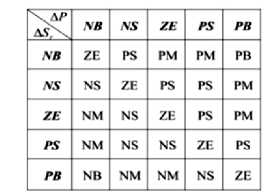
Fig. 3: Membership functions and rule table of fuzzy control
Fuzzy control has been proposed to tackle the problem of car suspension for the unknown environmental parameters. However, the large amount of the fuzzy rules makes the analysis complex. Some researchers have proposed fuzzy control design methods based on the sliding-mode control (SMC) scheme. Since only one variable is defined as the fuzzy input variable, the main advantage of the FSMC is that it requires fewer fuzzy rules than FC does. Moreover, the FSMC system has more robustness against parameter variation. Although FC and FSMC are both effective methods, their major drawback is that the fuzzy rules should be previously tuned by timeconsuming trial-and-error procedures.
Traditional SMC is representing the simpler form of the robust control. Since the system is of the first order, the switching function is selected as:
= - ,
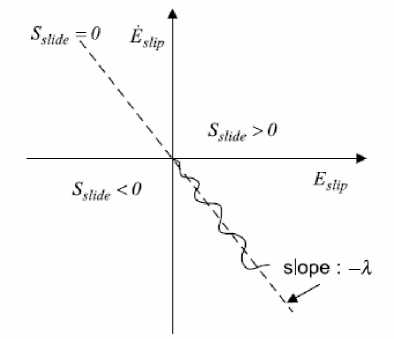
Fig. 4: Phase plane of sliding mode control
Where λr is the reference input wheel slip. The sliding motion occurs when state ( , ̇ ) reaches subspace (a point in this case) defined by s=0 . (see Fig.4 )
The control that keeps the state on the switching subspace is called the equivalent control. Thedynamics in sliding mode can be written as
̇=0
It can be shown that,
S (x,, x2) = x2 + Ax, X > 0
For the convergence conditions:
Ueq = -L '[alX1 + (a2 + X)x2]
where:
a1: –ks/ Ms a2: –bs/ Ms
L: a gain of the control related to Ms
L=√ , bmin: empty vehicle bmax: loaded vehicle
Ug guarantee convergence towards the sliding surface and is defined by following form:
Ug =- L- K .sgn( S )
K is satisfying the sliding condition. When the system state is on the switching subspace, the hitting control is zero. The hitting control is determined by the following reaching condition, where is a strictly positive design parameter:
̇≤- | |
Assume there are n rules in a fuzzy knowledge base and each of them has the following form:
Rule i: if s is S i the u is α i +β i s
Where u is the output variable of the fuzzy system; S are the membership functions and ( α i ,β i ) are singleton control actions. By the method of center of gravity:
∑ ( + )
= ⧸∑
where wi is the firing weight of the ith rule, α=[α1, …., α n ]T, and β =[β 1 , …., β n ]T
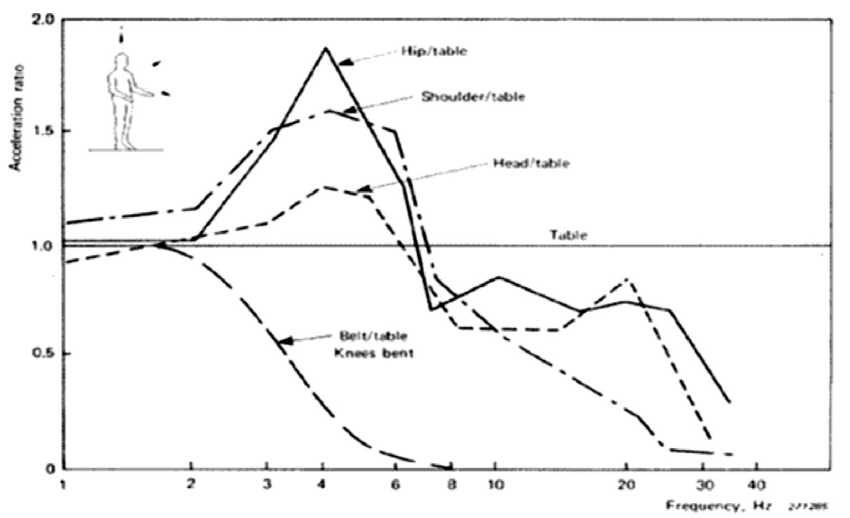
Fig. 5.a: Transmissibility of vertical vibration from table to human body, [17]
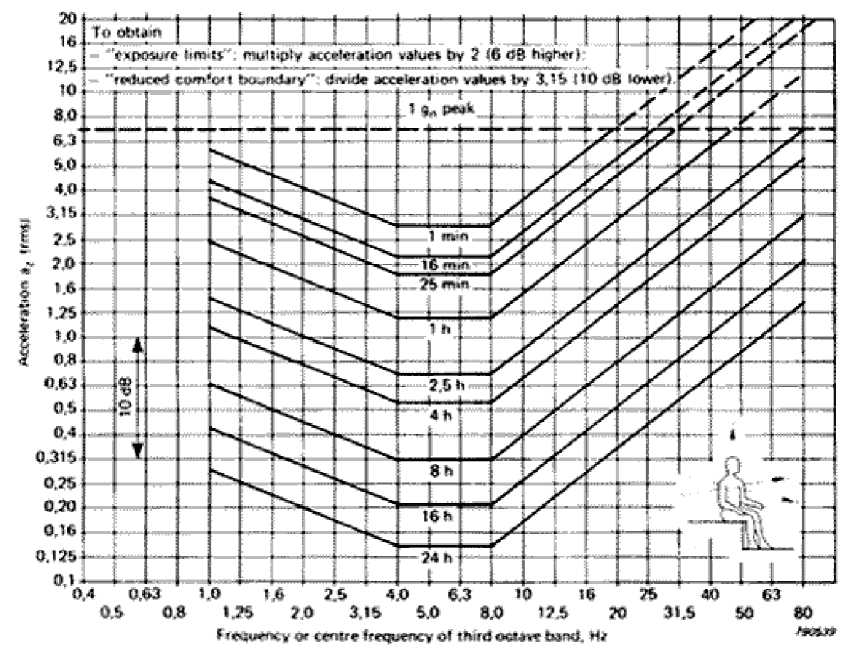
Fig. 5.b: Vertical vibration exposure criteria curves, [17]
-
IV. Simulation Results
The mathematical model of the system and the proposed sliding mode controller as defined in previous equation were simulated on computer by using the MATLAB and SIMULINK software package.
Fig. 3a shows the suspension travel of both the active and passive suspension systems due to a step dump for comparison purposes. Fig. 6 illustrates clearly how the active suspension can effectively absorb early the vehicle vibration at 1.6 sec. while the passive system absorb at 2.25 sec. Moreover the wheel deflection is also smaller in the active suspension system.The body acceleration in the active suspension system is reduced significantly, which guarantee better ride comfort. The corresponding controller effort is illustrated at Fig.7.
Another common road inputs model assumed that the vehicle is to travel at a constant forward speed over
-
i) A random road profile, which is approximated by an integrated white noise input.
-
ii) the road profile w (t) representing a single bump that acts as disturbance, given by cosine function:
w(t ∝ (1+соѕ8 nt )×0․5 ti ≤ t ≤ t2
()={0 otℎerwise
Where α is the height of the bump, t1 and t2 are the lower and the upper time limit of the bump. Figure 8 shows the bump height for 10 cm.
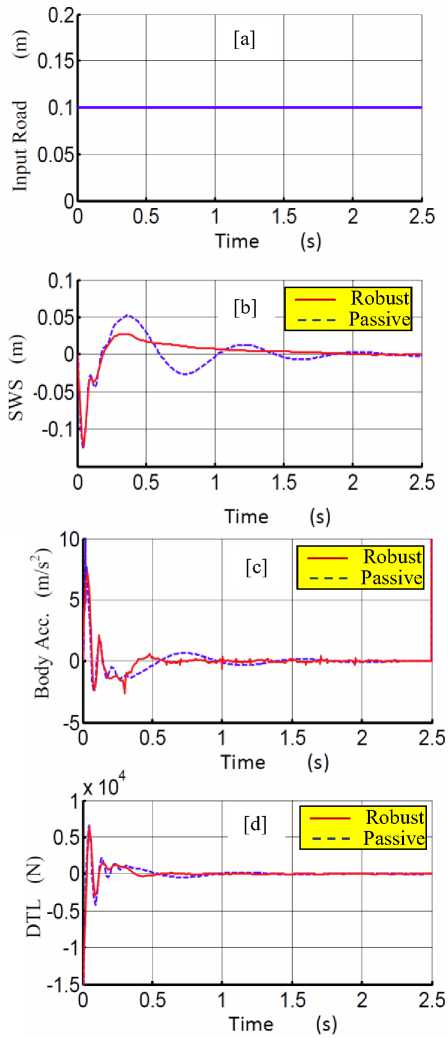
Fig. 6: The response of the suspension system with passive and robust Fuzzy control systems on smooth road
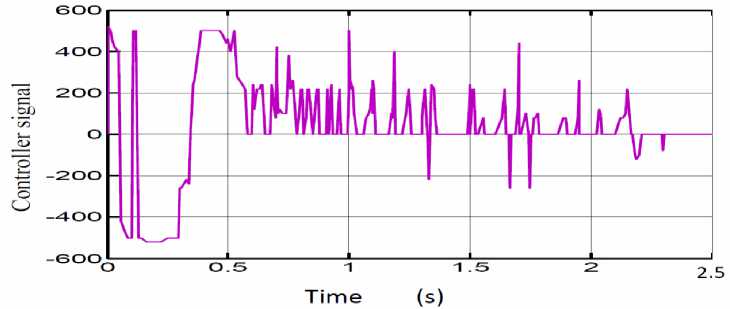
Fig. 7: Fuzzy control signal for smooth road
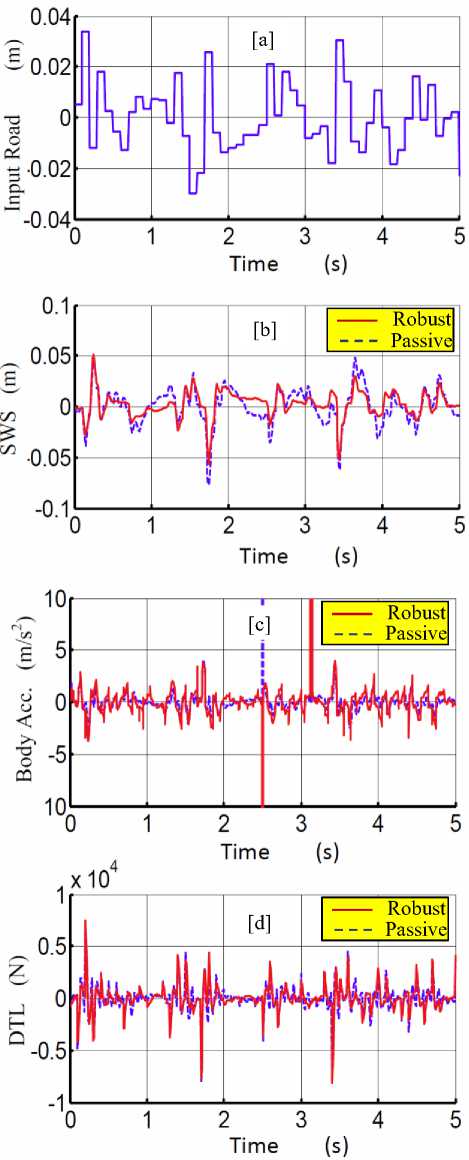
Fig. 8: The response of the suspension system with passive and robust Fuzzy control systems on real road roughness
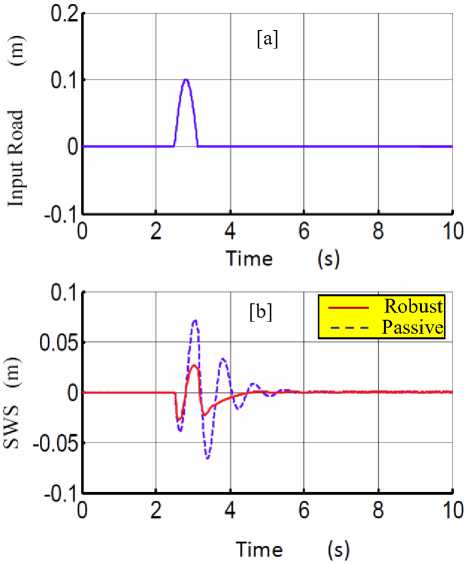
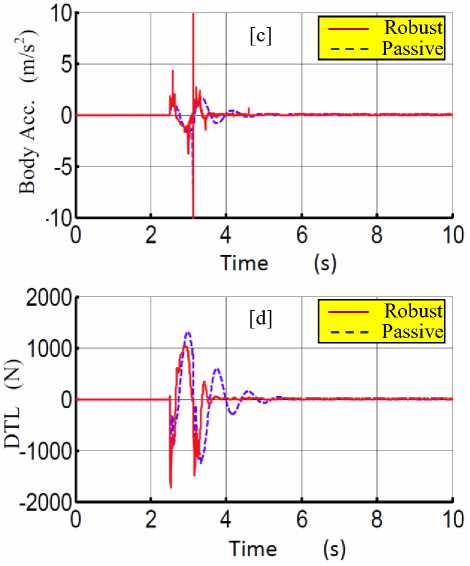
Fig. 9: The response of the suspension system with passive and robust Fuzzy control systems on cosine road profile
In Figs. (8,9) the results confirm the robustness of the proposed designed controller with the different road conditions. Therefore it is clear that the active suspension system improves the ride comfort while retaining the road handling characteristics, compared to the passive suspension system.
-
V. Conclusion
Many different control methods for suspension have been developed and research on improved control methods is continuing. Most of these approaches require system models, and some of them cannot achieve satisfactory performance under the changes of various road conditions, while soft computing methods like fuzzy control don’t need a precise model.
Computer simulations are performed to verify the feasibility of the proposed sliding mode fuzzy controller for the active suspension design by comparing with the passive suspension system. Based on simulation, it can be concluded that the sliding mode fuzzy control of active suspension system performs well as it is preferred to passive suspension system. This designed control is simple and easy to implement.
References Robust Sliding Mode Fuzzy Control of a Car Suspension System
- Hac, A.: Suspension optimization of a 2-dof vehicle model using a stochasticoptimal control technique. Journal of Sound and Vibration. 100(3), 1985, pp 343-357.
- Narendra, K. and K. Parthasarathy, Identification and Control of Dynamical Systems Using Neural Network IEEE Transaction on Neural Network, 1990. 1(1): pp. 4-27. International Journal of Control and Automation Vol. 4 No. 2, June, 2011.
- Barron, M. B. and Powers, W. F., 1996, "The Role of ElectronicControls for Future Automotive Mechatronic Systems,"IEEE/ASME Trans. Mechatronics, Vol. 1, No. 1, pp. 80-88.
- Hrovat, D., and Hubbard, M.: A comparison between jerk optimal andacceleration optimal vibration isolation. Journal of Sound & Vibration, 112, 2 , 1987, pp 201-210.
- Sharp, R.S., and Crolla, D.A.: Road vehicle suspension design - a review.Vehicle System Dynamics, 16, 1987, pp 167-192.
- Yue, C., Butsuen T., and Hedrick, J.K.: Alternative control laws for automotiveactive suspensions, ASME, Journal of Dynamic Systems, Measurement and Control, 111, 1989, pp 286-291.
- Chalasani, R.M.: Ride performance potential of active suspension systems–Part I: Simplified analysis based on a quarter-car model. ASME Monograph, AMD - vol. 80, DSC - vol. 2, 1986, pp 206-234.
- Hac, A., Youn, I., and Chen, H.H.: Control of suspension for vehicles with flexible bodies - Part I: active suspensions. ASME, Journal of Dynamic Systems, Measurement and Control, 118, 1996, pp 508-517.
- Rutledge, D.C., Hubbard, M., and Hrovat, D.: A two dof model for jerk optimalvehicle suspensions. Vehicle System Dynamics, 25, 1996, pp. 113-136.
- Lan Bo, Yu Fan, “Design and Simulation Analysis of LQG Controller of Active Suspension”, Transactions of The Chinese Society of Agricultural Machinery, 2004, 1: pp.45-49.
- F Yu A Corolla, “An optimal self - tuning controller for an active suspension”, Vehicle System Dynamic, 1998, 29: pp.51-65.
- Wilson D A, Sharp R S, Hassan S A, “Application of linear optimal control theory to the design of automobile suspensions”. Vehicle System Dynamic, 1986, 15: pp.103~118.
- Lin, Kanella, kopoulos J S I, “Nonlinear design of active suspensions” IEEE Control Systems, 1997, 17(3): pp.45-49.
- ZHOU Ping, SUN Yue-dong, WANG Bing, “Simulation study on LQG controller for vehicle suspension system”, Journal of University of Shanghai for Science and Technology, 2007, 5: pp.63-69
- M.M.M. Salam and Ayman A. Aly, "Fuzzy control of a quarter-car suspension system", International Conference in Mechanical Engineering, ICME, pp. 258-263, Tokyo, Japan, May 27-29, 2009.
- R.Vatankhah, M.Rahaeifard, and Aryaalasty," Vibration Control of Vehicle Suspension System Usingadaptive Critic-Based Neurofuzzy Controller", Proceeding o/the 6th International Symposium on Mechatronics and its Applications (ISMA09), Sharjah, UAE, March 24-26, 2009.
- ISO/DIS 5349 & ISO 2631 – 1978, human sensitivity band.
