Роль геокосмического транспорта в крупномасштабной индустриализации космоса

Автор: Юницкий А.Э., Исаев Д.А., Лукша В.Л., Лобазова И.Е., Телегина А.А.
Рубрика: Расчет и конструирование
Статья в выпуске: 3 т.23, 2023 года.
Бесплатный доступ
На сегодняшний день человечество столкнулось с рядом экологических проблем, от решения которых зависит наше дальнейшее существование. Авторами предлагается системный подход по выходу из сложившейся ситуации, детально описанный в программе «ЭкоМир». Основным вектором дальнейшего индустриального развития станет космический, но для его реализации необходим транспорт, обладающий рядом уникальных характеристик. Авторами статьи предложена конструкция общепланетарного транспортного средства (ОТС), который по внешнему виду представляет собой тор с диаметром экватора и с поперечным сечением в несколько метров. Предполагаемая масса данного геокосмического летательного аппарата составляет 30 млн тонн. Предложено решение задачи стабилизации центрального положения ротора в канале статора общепланетарного транспортного средства (ОТС) при помощи сил магнитных полей постоянных магнитов. Спроектированная система компенсирует внешние силы, действующие как на ротор при подготовке взлёта, так и на статор при наборе высоты. Приведены схемы распределения магнитных потоков в подвесе, а также при действии на ротор силы гравитации Земли у ее поверхности. Разрабатываемое общепланетарное транспортное средство (ОТС) призвано способствовать индустриализации космоса с использованием его преимуществ: вакуума, экстремально низких и высоких температур, невесомости, энергетических и сырьевых ресурсов. Результаты проведённых исследований и их анализ демонстрируют, что ОТС в состоянии обеспечить планетарный масштаб и стремительный темп практической реализации проекта uSpace.
Высокоскоростной линейный двигатель, магнитная левитация, магнитный подвес, общепланетарное транспортное средство (отс)
Короткий адрес: https://sciup.org/147241792
IDR: 147241792 | УДК: 53.098 | DOI: 10.14529/engin230304
The role of geocosmic transport in the large-scale industrialization of the space
Today, humanity is faced with a number of environmental problems, the solution of which depends on our continued existence. The authors propose a systematic approach to get out of this situation, which is described in detail in the EcoSpace program. The main vector of further industrial development will be space, but its implementation requires transport that has a number of unique characteristics. The authors of the article proposed the design of a general planetary vehicle (GPV), which is a self-supporting aircraft (with a length of 40,076 km, a total mass without payload of about 30 million tons), made in the form of a torus with a cross section of several meters, covering the planet in a plane, parallel to the equator. A solution to the problem of stabilization of the central position of the rotor in the channel of the stator of a general planetary vehicle (GPV) with the help of the forces of the magnetic fields of permanent magnets is proposed. The designed system compensates for external forces acting both on the rotor during takeoff preparation and on the stator during climb. The diagrams of the distribution of magnetic fluxes in the suspension, as well as under the influence of the Earth's gravity force on the rotor near its surface, are given. Thus, a general planetary vehicle, designed to move all harmful industrial production beyond the planet Earth, opens up prospects for using the conditions of weightlessness, vacuum, ultra-low and ultra-high temperatures, spatial, energy and raw materials of near space and the boundless Universe. The results of the conducted studies and their analysis demonstrate that UTS is able to provide a planetary scale and a rapid pace of practical implementation of the uSpace project.
Текст научной статьи Роль геокосмического транспорта в крупномасштабной индустриализации космоса
Сегодня мы в полной мере ощущаем результат последствия технологического развития и создания глобальной индустрии (техносферы) в том, что биосфера нашей планеты наполнена техногенным смогом, угрожающим не только человеку, но и всему живому на Земле. Каждый час на Земле исчезает примерно три вида живых существ, т. е. более 70 видов погибают ежедневно, более 26 тыс. – ежегодно [1]. Некоторые из них исчезают по естественным причинам вследствие эволюции, но всё бoльшая часть – из-за антропогенных факторов: возрастающего количества сердечно-сосудистых заболеваний, аллергий, заболеваний лёгких, а также генетических нарушений и различных наследственных болезней, напрямую связанных с ухудшением экологии.
Происходят необратимые изменения ландшафта, почв, исчезают леса, загрязняются реки, моря и океаны, интенсивно разрушается озоновый слой, защищающий всё живое от губительного жёсткого излучения Солнца.
В последнее время многими учеными предлагается путь спасения земной биосферы через перенос вредного промышленного производства в космос и дальнейшее его освоение [2, 3].
Однако стоит отметить, что суммарная энергетическая эффективность ракеты-носителя, работающей на твердом или жидком топливе, составляет около 1 %. Геокосмические перевозки с помощью ракет всегда будут оставаться крайне опасными с точки зрения экологии и здоровья человека [4], а их стоимость будет превышать 1 млн долларов США за каждую тонну груза, доставленного в космос. И, самое главное, озоновый слой, защищающий нашу планету от жесткого космического излучения (ультрафиолета), разрушается в колоссальных объемах – миллионы тонн за каждый пуск тяжелой ракеты [5, 6]. Общеизвестно, что озон образуется из воздуха, проходящего через озонатор. Стоимость производства озона зависит от цен на электроэнергию, так как этот процесс требует больших энергозатрат. На сегодняшний день промышленные озонаторы способны производить 1 кг озона, потребляя до 10 кВт·ч электроэнергии [7]. С учетом средней мировой стоимости электроэнергии, равной 10 центам США/кВт·ч, затраты на электроэнергию для получения 1 тонны озона будет равна 1000 долл. США. На самом деле эти вложения будут значительно выше с учётом стоимости оборудования и накладных расходов.
Становится очевидно, что продолжать технологический путь развития земная цивилизация сможет только при условии параллельной индустриализации космоса, которую вследствие ограниченности сырьевых, энергетических и других земных ресурсов необходимо начинать уже сегодня.
Беларуским учёным А.Э. Юницким разработана программа «ЭкоМир» [8], представленная на рис. 1 и основанная на синтезе космического мировоззрения и конкретных астроинженерных технологий, реализуемых в обозримом будущем. Космический вектор «ЭкоМир» описывает программа uSpace.

ЭкоКосмоДом Линейные города uCrty
Рис. 1. Схематическое изображение программы «ЭкоМир» Fig. 1. Scheme of EcoSpace program
1. Расчетная схема, принятые допущения {методология, метод исследования}
Ключевым моментом, который необходимо решить для масштабной индустриализации космоса, является вопрос логистики, а точнее наличие подходящего геокосмического транспорта. Даже в самых смелых прогнозах известные геокосмические транспортные системы (ракетоносители, космический лифт, электромагнитная пушка и др.) [9–12] способны перевозить в год всего несколько тысяч тонн грузов по маршруту Земля – орбита – Земля, что в десятки тысяч раз меньше требуемых – менее одного грамма в год на каждого жителя планеты. Именно геокосми-ческий грузопоток будет определять темпы развития космической индустрии на благо земной цивилизации, живущей в своём доме на планете Земля, к тому времени – порядка 10 млрд человек. Однако в число недостатков ракет и ракетоносителей входят:
– сверхвысокая мощность двигателей, равная 1 млн кВт/1 т груза;
-
– скорость истечения реактивной струи;
– сверхвысокие температуры.
Представьте себе, например, сколько стоил бы обычный легковой автомобиль с двигателем мощностью не 100 кВт, а 1 млн кВт? Как мощность реактивных двигателей, так и ускорение разгона (30–50 м/с2 и более) можно было бы снизить на порядок до приемлемых для обычного пассажира 1–1,5 м/с2, как и в традиционном наземном транспорте, если увеличить время их эффективной работы с 4 мин до 150 мин. Вследствие законов физики это, к сожалению, не представляется возможным, так как во время полёта реактивная тяга должна превышать стартовый вес.
Итак, основные требования, предъявляемые к геокосмическому транспорту:
1) размещение космической промышленности на низких круговых орбитах в плоскости экватора;
2) ГКТ должен быть способным осуществлять полет, а не являться стационарной конструкцией;
3) ГКТ должен быть экологически чистым, не нарушающим озоновый слой в процессе гео-космических перевозок;
4) теоретический коэффициент полезного действия ГКТ должен быть близок к 100 %;
5) обеспечение грузопотоков в миллионы, а в перспективе и в миллиарды тонн грузов в год;
6) возможность рекуперации избыточной энергии (потенциальной и кинетической) космической продукции при её доставке из космоса на Землю;
7) использование для выхода в космос экологически чистой энергии – электрической;
8) ГКТ в процессе геокосмических перевозок должен передавать импульс, момент количества движения и энергию непосредственно на твёрдую земную кору, без включения в механическую цепочку атмосферы планеты.
2. Расчетные зависимости (модели)
Центральным звеном геокосмической программы uSpace, связывающим Земную и космическую индустрии, является создание и запуск общепланетарного транспортного средства (ОТС) [13].
ОТС по внешнему виду представляет собой тор с диаметром экватора Земли и с поперечным сечением в несколько метров. Внутри тора находятся приводные элементы и системы ленточных маховиков для подъёма ОТС. Пассажиры и грузы перевозятся в специально оборудованных модулях, гандолах, которые расположены по всей протяженности ОТС на определенном расстоянии друг от друга.
Предполагаемая масса данного геокосмического летательного аппарата без учета нагрузки составляет 30 млн тонн [14].
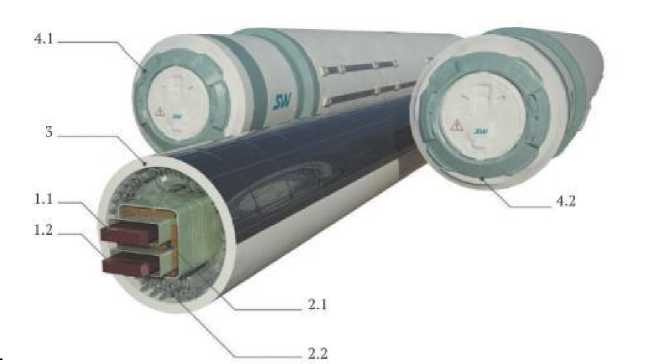
Рис. 2. Конструкция ОТС: 1.1 и 1.2 – ленточные маховики; 2.1 и 2.2 – системы приводы;
3 – корпус; 4.1 и 4.2 – пассажирские/грузовые модули
Fig. 2. GPV structure: belt flywheels 1.1 and 1.2, 2.1 and 2.2 drive systems located inside housing 3, external compartments (capsules) 4: passenger 4.1 and cargo 4.2
По мере подъёма ОТС в космос, его диаметр должен плавно увеличиваться на 63 км на каждые 10 км подъёма. Это достигается посредством специальных гидравлических коаксиальных устройств с регулируемой жёсткостью. Кроме того, по мере подъёма до высоты 400 км корпус ОТС приобретает угловую скорость вращения, около 1 °/с. Перед стыковкой с КИО «Орбита» корпус ОТС имеет первую космическую скорость, как и КИО «Орбита», что делает стыковку возможной. В процессе взлёта и приземления центр масс ОТС и Земли совпадают, таким образом, высота ОТС над взлётно-посадочной эстакадой изменяется равномерно на всей её протяжённости.
На этапе подготовки ко взлёту один из маховиков разгоняется линейными электродвигателями до скорости 12 км/с. Маховик в момент отрыва ОТС от эстакады обладает коллосальной кинетической энергией, которой с избытком хватает для разгона второго маховика и корпуса ОТС до первой космической скорости для высоты орбиты КИО «Орбита». В процессе взлёта кинетическая энергия первого маховика преобразуется в электрическую, аккумулируемую буферными батареями. В результате этого взаимодействия корпус ОТС увлекается магнитными силами взаимодействия и разгоняется в ту же сторону, что и первый маховик. Первый маховик, в результате этого же взаимодействия, теряя энергию, замедляется. Разгоняющийся от взаимодействия с первым маховиком корпус ОТС в это же время отталкивается от неподвижного второго маховика, получая дополнительный, также способствующий разгону импульс. Имеет место и переброс электроэнергии от генератора на базе первого маховика к электродвигателю второго без участия буферных элементов, что делает КПД процесса переноса энергии между маховиками близким к 100 %.
ОТС является экологически чистым геокосмическим летательным аппаратом, использующим для выхода в космос запасённую на Земле кинетическую энергию.
Основные составляющие ОТС и принцип его работы:
1) три связанные кольцевые структуры, расположенные в плоскости экватора с центром масс, совпадающим с центром масс Земли;
2) кольцевые структуры имеют возможность вращаться вокруг планеты и относительно друг друга со скоростями свыше 12 км/с;
3) кольцевые структуры имеют возможность удлиняться в процессе взлета, набора высоты, снижения и посадки в связи с изменением диаметра;
4) кольцевые структуры имеют возможность взаимодействовать при помощи магнитных полей и таким образом обмениваться кинетической энергией.
3. Экспериментальные исследования
На этапе подготовки ко взлёту первый маховик разгоняется и начинает испытывать на себе центробежную силу, так как его составные части движутся по дуге окружности. Центробежная сила направлена по радиусу, от центра земли. Так как центробежная сила на скорости взлёта много больше силы тяготения, ОТС начинает подъём вверх.
В настоящей работе предлагается компоновка постоянных магнитов для решения задачи подвеса маховиков, обеспечивающая стабильную левитацию маховиков [15–20]. Система магнитных полей стабилизирует положение корпуса ОТС относительно продольной оси маховика при возникновении силы, стремящейся отклонить корпус ОТС в разных направлениях, отличных от данной оси.
При помощи компьютерного моделирования, а также экспериментальных данных получены графики зависимости силового взаимодействия одноимённых полюсов постоянных магнитов от расстояния между ними. На рис. 3 показаны зависимости силы между двумя прямоугольными магнитами от расстояния между ними.
Сравнение полученных данных показало состоятельность компьютерного моделирования. Математическая модель с точностью не ниже 5 % отражает действительность.
В результате взаимного влияния полей отдельных магнитов – появились зоны их слабой и сильной концентрации. На рис. 4 красным цветом показаны области увеличения концентрации магнитного потока, синим – уменьшения.
Поперечное сечение вакуумного канала и одного из маховиков предлагаемой конструкции показано на рис. 5.
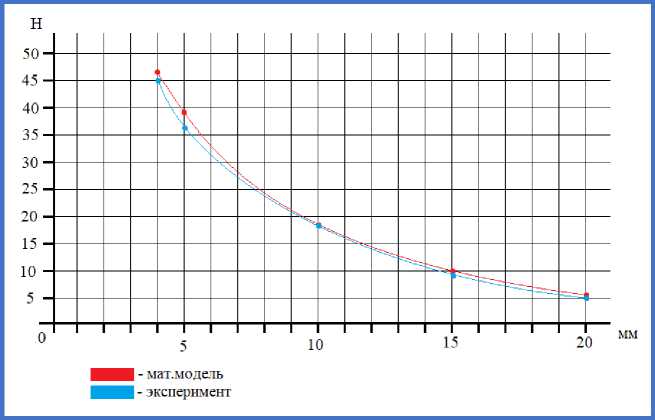
Рис. 3. Характеристика силового поля постоянного магнита
Fig. 3. Characteristics of the force field of a permanent magnet
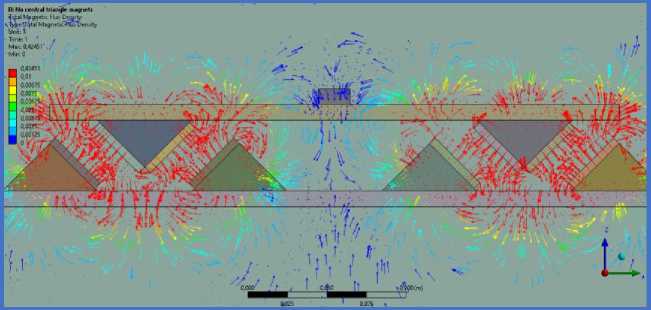
Рис. 4. Распределение плотности магнитного потока, Тл Fig. 4. Distribution of magnetic flow density, T
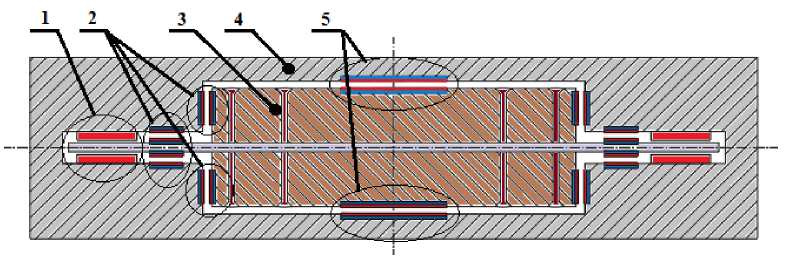
Рис. 5. Конструкция ротора ОТС: 1 – линейный двигатель; 2 – стабилизирующие магниты; 3 – ротор; 4 – статор; 5 – несущие силовые магниты
Fig. 5. The design of the GPV rotor: 1 – linear motor; 2 – stabilizing magnets;
3 – rotor; 4 – stator; 5 – bearing power magnets
На рис. 6 представлен фрагмент ротора ОТС. Сверху и снизу расположены силовые магниты, воспринимающие подъёмную силу от маховика. Остальные магниты стабилизируют ротор и предотвращают его контакт со стенками канала.
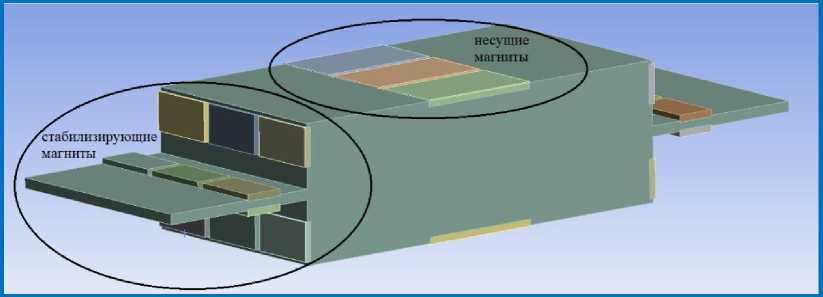
Рис. 6. Конструкция ротора ОТС Fig. 6. GPV rotor design
На рис. 7 показан фрагмент вакуумного канала с элементами магнитного подвеса.
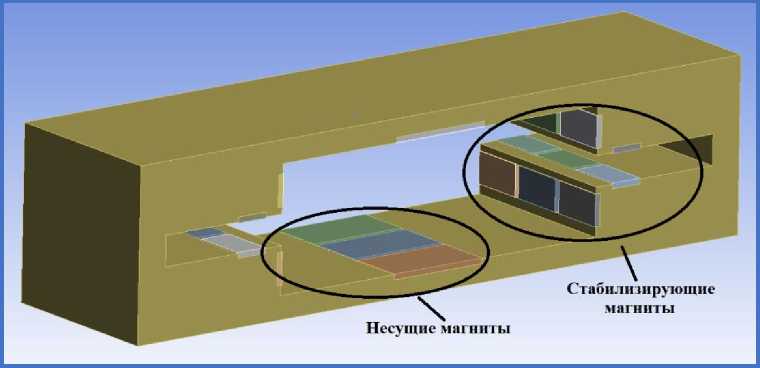
Рис. 7. Конструкция вакуумного канала Fig. 7. The design of the vacuum channel
Распределение плотностей магнитных потоков в системе корпус – маховик представлено на рис. 8.
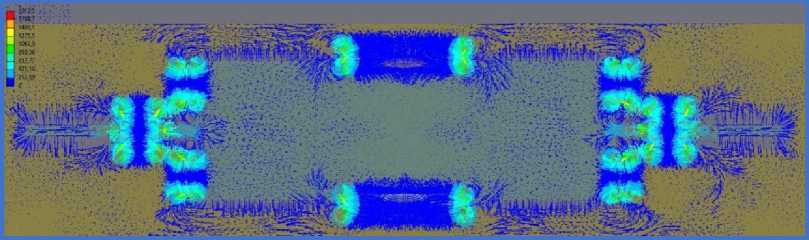
Рис. 8. Распределение магнитных потоков в системе корпус – маховик (поперечный разрез) Fig. 8. Distribution of magnetic fluxes in the housing – flywheel system (cross section)
Результирующая сила, действующая на маховик со стороны магнитов корпуса на уровне моря равна 30 Н и направлена вверх (рис. 9).
Грузоподъёмность системы – 12 330 Н/м, или 1257 кгс/м. При удельной массе маховиков и корпуса 250, 225 и 200 кг/м соответственно максимальная масса полезного груза – 582 кг/м. Фактическая грузоподъёмность – 500 кг/м.
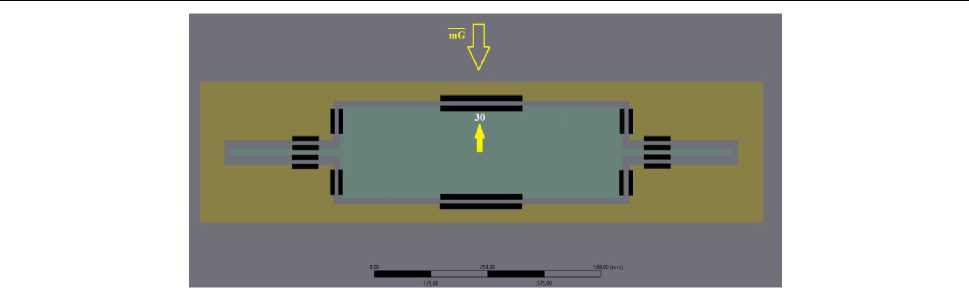
Рис. 9. Результирующая сила в статическом режиме Fig. 9. Resultant force in static mode
Массив секций, удерживающих магниты, формирует внутреннюю структуру вакуумного канала и маховика (рис. 10).
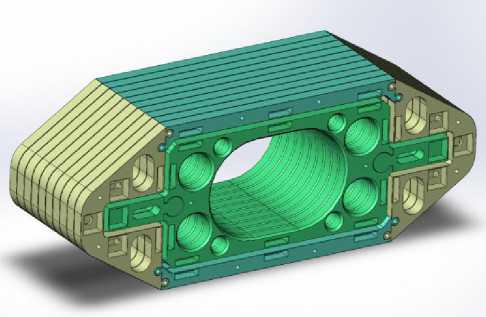
Рис. 10. Визуализация внутренней структуры вакуумного канала и маховика
Fig. 10. Visualization of the internal structure of the vacuum channel and flywheel
В процессе разработки модели магнитная система стабилизатора была модифицирована.
На рис. 11 схематично представлена конструкция магнитной системы, состоящей из одинаковых фрагментов.
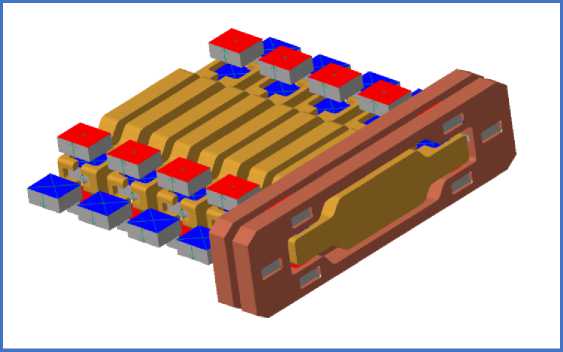
Рис. 11. Конструкция магнитной системы
Fig. 11. Design of the magnetic system
Магниты корпуса A 1, A 2, A 3, C 1, C 2, C 3 (рис. 12) стабилизируют маховик с установленными на нём магнитами B и D в центральном положении вакуумного канала.
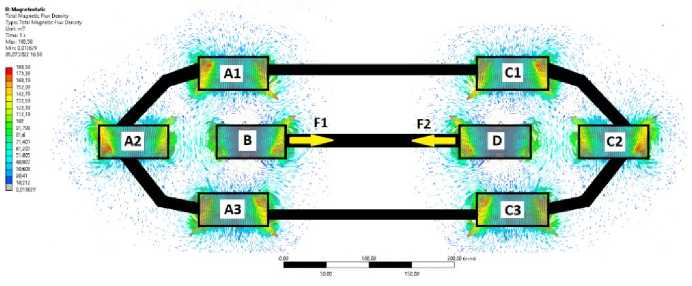
Рис. 12. Силы, действующие на маховик со стороны корпуса Fig. 12. Forces acting on the flywheel from the body
При нарушении равенства зазоров между стенками маховика и вакуумного канала возникает сила, стремящаяся восстановить это равенство.
На рис. 13 и 14 видна реакция магнитного поля на силу всемирного тяготения, приложенную к маховику.
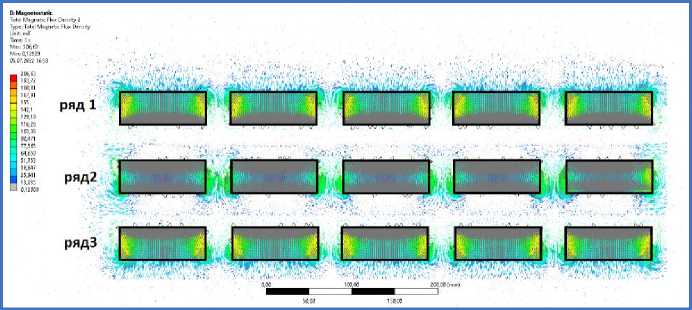
Рис. 13. Распределение плотности магнитного поля на околоземной орбите Fig. 13. Distribution of the magnetic field density in near-Earth orbit
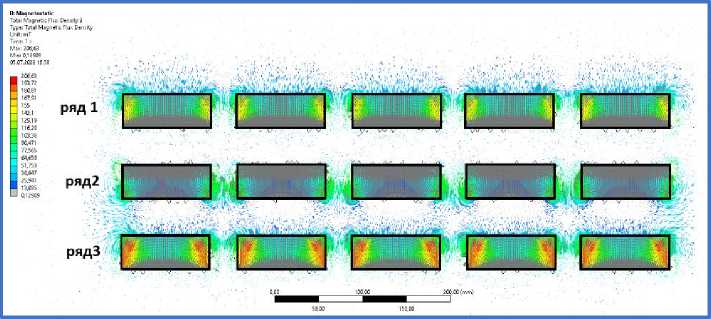
Рис. 14. Изменение распределения плотности магнитного поля у поверхности Земли Fig. 14. Change in the distribution of the magnetic field density near the Earth's surface
Выводы
-
1. Продолжать технологический путь развития земная цивилизация сможет только при условии параллельной индустриализации космоса.
-
2. Центральным звеном геокосмической программы uSpace, связывающим земную и космическую индустрии, является создание и запуск экологически чистого общепланетарного транспортного средства (ОТС).
-
3. Конструкция ротора ОТС представляет собой систему из линейного двигателя, ротора, статора, стабилизирующих и несущих силовых магнитов.
-
4. Перспективным направлением исследований в расположении магнитов в магнитном подвесе маховиков ОТС является исследование магнитных массивов Хальбаха.
Обсуждение и применение
В результате проведённых исследований и расчётов найдена конфигурация магнитной системы, обеспечивающая стабилизацию ротора относительно корпуса ОТС на этапе подготовки взлёта, а также стабилизацию в плоскости горизонта корпуса ОТС относительно ротора на этапе взлёта.
Форма взлётно-посадочной эстакады в плоскости экватора будет отличаться от идеальной окружности в силу рельефа поверхности Земли. Магнитная система стабилизирует положение ротора относительно корпуса ОТС в вертикальной плоскости на этапе подготовки к взлёту.
На этапах взлёта и посадки ОТС магнитная система стабилизирует в вертикальной плоскости положение корпуса ОТС относительно роторов, а также устранит вращение ротора внутри канала и исключит возможность контакта ротора со стенками вакуумных каналов на всех фазах эксплуатационного цикла. Вместе с тем описанная система не препятствует движению роторов вдоль каналов.
Список литературы Роль геокосмического транспорта в крупномасштабной индустриализации космоса
- Вокруг света. Шестое великое вымирание [Электронный ресурс]. Режим доступа: http://www.vokrugsveta.ru/article/233607/. – Дата доступа: 05.04.2019.
- Mai C.C. The Space Cost Curve and Variable Transportation Cost // Urban Studies. 1980. No. 17. Р. 357–359.
- Correction: Active Compliance Control of a Position-Controlled Industrial Robot for Simulating Space Operations / He Jun, Shen Mingiin, Gao Feng, Zhang Haibo // Chinese Journal of Mechanical Engineering. 2023. No. 14. P. 645–681.
- The human helth effects of ozone depletion and interaction with climate change / M. Norval, R.M. Lucas, A.P. Cullen, F.R. de Gruijl, J. Longstreth, Y. Takizawa, J.C. van der Leun // Photochemical and Photobiological Sciences. 2011. No. 10. pp. 199–225.
- The environmental impact of emissions from space launches: a comprehensive review / J.A. Dal-las, S. Raval, Gaitan J.P. Alvarez, Say- dam S., A.G. Dempster // Journal of Cleaner Production. 2020. No. 255. 120209. http://dx.doi.org/10.1016/j.jclepro.2020.120209
- Ozone depletion caused by NO and H2O emissions from hydrazine-fueled rockets / M.N. Ross, M.Y. Danilin, D.K. Weisenstein, M.K.W. Ko // Journal of Geophysical Research. 2004. Vol. 109. D21305. http://dx.doi.org/10.1029/2003JD004370/
- Marks T.J., Fragalà I.L. Fundamental and Technological Aspects of Organof-Element Chemistry. Springer Science & Business Media. 1985. 414 p.
- Безракетная индустриализация космоса: проблемы, идеи, проекты: материалы III между-нар. науч.-техн. конф., Марьина Горка, 12 сент. 2020 г. // Астроинженерные технологии, Струнные технологии; под общ. ред. А.Э. Юницкого. Минск: СтройМедиаПроект, 2021. 516 с.
- William J., Emrich Jr. Principles of Nuclear Rocket Propulsion. Elsevier. 2023. 414 p.
- M. van Pelt, Space Tethers and Space Elevators, Springer Link: Praxis Publishing, Ltd. 2009. P. 143–178. DOI: 10.1007/978-0-387-76556-3_6
- Betelskii V.V., Ivanov M.B., Otstavnov E.I. Model problem of a space elevator // Springer Link: Cosmic research. 2005. No. 43. P. 152–156.
- Evlanov E.N., Zavjalov M.A., Tyuryukanov P.M. Electron guns for spacecraft // Springer Link: Cosmic research. 2013. No. 51. P. 388–395.
- Юницкий А.Э. Струнные транспортные системы: на Земле и в Космосе: науч. издание. Силакрогс: ПНБ принт, 2019. 576 с.
- Общепланетарное транспортное средство и космическое ожерелье «Орбита» как альтернатива ракетному освоению околоземного пространства / А.Э. Юницкий, С.А. Пронкевич, С.В. Артюшевский, В.Л. Лукша // Вестник РУДН Серия: Инженерные исследования. 2021. Т. 22, № 4. C. 364–372.
- Абдуллаев М., Маткасимов М., Каримжонов Д. Применение линейных двигателей в электроприводах // Universum: технические науки. 2020. № 11 (80). С. 12–14.
- Синюк К.В., Анчутин В.А. Применение нечёткой логики для систем управления линейным синхронным двигателем с постоянными магнитами // Символ науки. 2018. № 3. С. 21–24.
- Ахатов С.Т., Солоненко В.Г., Махметова Н.М. Исследование системы синхронной тяги с линейными двигателями // Вестник КазАТК. 2021. Т. 116, № 1. С. 89–95.
- Ким К.К. Системы электродвижения с использованием магнитного подвеса и сверхпроводимости: монография. Саратов: IPR Media, 2019. 351 с.
- Пенкин В.Т., Ковалёв К.Л. Синхронные электрические машины с композитными и объёмными сверхпроводниками в роторе для транспортных систем. М.: МАИ, 2018. 216 с.
- Мартыненко Ю.Г. О проблемах левитации тел в силовых полях // Соросовский образовательный журнал. 1996. № 3. С. 82–86.
