Simulation of solar panel orientation system based on fuzzy logic in SimInTech visual simulation environment

Author: Chubar A. V., Ustimenko V. V., Mikhaylenko L. A., Myznikova V. A., Matskevich Y. A.
Journal: Siberian Aerospace Journal @vestnik-sibsau-en
Section: Informatics, computer technology and management
Article in issue: 1 vol.22, 2021.
Free access
Obtaining electricity from renewable energy sources is primarily due to the exhaustion of traditional natural energy sources, such as coal, oil, gas. Today it is a promising area of development. The adverse impact on the environment of the use of traditional energy technologies is well known and scientifically proven. The use of traditional technologies inevitably leads to climate change, so the topic of the transition from traditional to alternative energy sources is undoubtedly relevant. Using of solar power plants with photovoltaic modules recently has gained relevance. However, the efficiency of such installations depends largely on their correct orientation to the Sun: the more precisely the system is installed, the more energy it will be able to convert. This article presents the results of the development of a simulation model of the solar panel orientation control system. To maximize the production of solar energy, the control system with tracking the Sun is built using fuzzy logic: fuzzy rules are formulated to control the positions of the object relative to the vertical and horizontal planes. The use of fuzzy logic is based on the product model of knowledge, which implies the use of linguistic variables to avoid the limitations inherent in classical product rules. The use of fuzzy control allows to correct the movement of the panel in the shortest time in the autonomous mode, thus reducing the arising power losses. Russian SimInTech dynamic simulation environment for technical systems is used as the system development environment. Simulation model is represented by several subprojects, united in a single database. The system model is implemented using standard blocks and a set of submodels, as well as a programming unit. The result of the work can be tracked in the 3D module of the built-in visual editor, which allows you to display the interaction of three-dimensional models objectively. In order to simplify and more finely implement the work of the project, a system of loading data, sunrise and sunset points, from an external Excel file was used.
Solar panel, fuzzy logic, dynamic simulation, SimInTech, 3D visualization.
Short address: https://sciup.org/148321786
IDR: 148321786 | UDC: 681.5.073 | DOI: 10.31772/2712-8970-2021-22-1-47-60
Text of the scientific article Simulation of solar panel orientation system based on fuzzy logic in SimInTech visual simulation environment
Introduction. In many countries, the use of regenerative resources today exceeds 10 %, and in some it is more than 20 %. Autonomous power supply systems based on solar panels (SP) are widely used. The scope of their use is regions that are located separately from the centralized power supply network. In Russia, due to the small number of sunny days, the use of alternative resources does not exceed more than 20 %. However, today there are a large number of international institutions whose goal is to spread the idea of the introduction and widespread use of renewable energy sources, as well as to directly disseminate information, knowledge and technologies in this area. The steady decline in the cost of solar panels over the past few years is also leading to more intensive use of solar energy around the world [1].
The use of new materials, as well as the possibility of installing rechargeable batteries, allows using the stored energy in adverse weather: solar modules produce electricity even when there is no direct sunlight. For example, with light clouds, you can get 60-80% of the power from the "full" Sun, with cloudy weather - up to 30 %.
However, the optimal conditions for generating electricity are a clear, sunny day, as well as the orientation of the panels perpendicular to the sunlight. The precise orientation of the working surfaces of the system to the Sun will ensure maximum performance.
The paper studies the problem of increasing the accuracy of the orientation of the solar panel. As a solution to this problem, we propose the use of fuzzy control [2], which has been widely used in such expert systems as nonlinear control and production management, self-learning machines, planning, forecasting systems, and many others [3]. It is experimentally proven that fuzzy control gives better results, compared to the results obtained with classical control algorithms.
Description of the automation object. A solar power plant is a complex of regulating equipment for one or more solar panels. Panels, as a rule, are rectangular in shape, made up of series-parallel connected typical solar cells that form a current-voltage characteristic.
The type of characteristic is determined by:
-
- the intensity of the solar flux falling on the panel;
-
- temperature panel;
-
- time of year;
-
- weather conditions and the relative position of the panels and the Sun.
The maximum power delivered to the load, other conditions being equal, is formed by the angles of incidence of solar radiation on the working surface of the panel. Therefore, controlling the orientation of solar panels is the most important factor in the operation of solar power plants.
The solar panel has certain geographical coordinates with the respect to the equator, and consequently with the respect to the current position of the Sun on the Earth's horizon. The panel orientation system, which includes a set of electromechanical devices, allows changing the azimuth angle and the angle of position, which determine the orientation of the panel in three-dimensional space. The control system allows changing the angles of the solar panel in automatic mode in order to best orient it to the sun.
The adjustable output coordinates are the azimuth angle, which varies from -90 to +90 degrees, and the position angle, which ranges from 0 to +90 degrees. Control coordinates – electric drives control signals. The main external influences are the current coordinates of the Sun.
Figure 1 shows a simplified block diagram of the control circuit of the support-rotary device according to the azimuth angle and the angle of inclination of the solar battery. The diagram shows: MC-micro-controller; CP-continuous part.
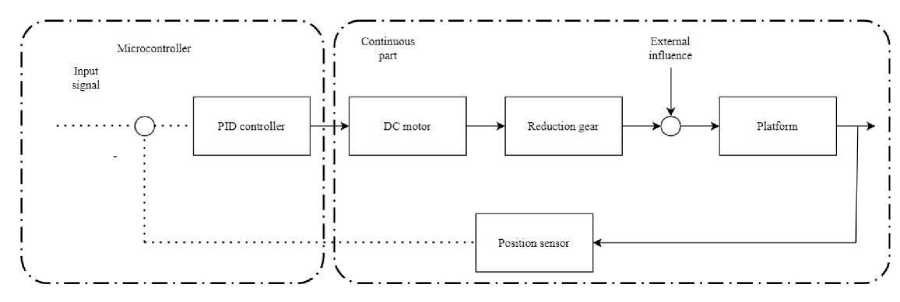
Fig. 1. Block diagram of the control loop of the rotary support device
Рис. 1. Структурная схема контура управления опорно-поворотного устройства
The elements of the continuous part: DC motor, the reduction gear, the platform and the position sensor are represented by their corresponding models in the form of typical dynamic links [4].
The microcontroller implements a control algorithm that ensures the absence of static error and a low percentage of overshoot. In order to obtain the necessary indicators, the PID control law is formed.
When designing and testing control algorithms for automated control systems, it is advisable to use visual modeling, when a real object is represented by its digital counterparts. This approach allows developing, compare, configure, and work out various control algorithms in the automated control system in a short time and justify the feasibility of using them.
Below a proposed algorithm for constructing and debugging a controller based on fuzzy logic in the SimInTech visual modeling environment to control the orientation of the solar panel.
Fuzzy logic. The mathematical theory of fuzzy sets allows describing fuzzy concepts and knowledge, operate with these descriptions and make fuzzy conclusions.
The use of fuzzy logic in systems is accompanied by the following steps:
-
1. Determination of input and output parameters of the system under consideration;
-
2. Fuzzification of these variables: transformation of a value from the space of physical variables to the fuzzy form of linguistic variables (LV).
-
3. Setting the membership function for each linguistic variable.
-
4. Forming a base of inference rules for the implemented fuzzy system.
-
5. Defuzzification of output variables: inverse conversion of fuzzy variables to physical variables;
-
6. Setting up and analyzing the adequacy of the developed model in a real-time system.
A linguistic variable is some variable, such as "water level". The values that this LV can take are called terms. For the LV "water level", the terms, for example, can be "low", "medium", "high", etc. However, these terms must have exact physical values. For example, the "tilt angle" variable can take any value from 0 to 90 degrees.
According to the theory of fuzzy sets [5], any value of an angle in the range from 0 to 90 degrees can be associated with a certain number, varying from 0 to 1, which determines the degree of belonging of this value of the inclination (for example, 75 degrees) to a particular term of the LV "tilt angle". In this case, the angle of 75 degrees can be set to the degree of belonging to the term "high", equal to 0.85, and to the term "low" - 0.15. The exact definition of the degree of belonging is determined only when working with experts. There is an opinion that for most systems, at least three terms are necessary to describe it: "low", "medium", "high", which contain two extreme values and the average. If three terms are not enough, the accuracy of the estimation can be improved by increasing the number of terms. The maximum allowed number of terms is unlimited and depends entirely on the system under consideration, as well as the accuracy of the description required for the system.
In other words, a set of rules should be developed that describe the control strategy of the system in question. Most often, to describe the dependencies between linguistic variables, the rule base is presented in the form of a structured text using fuzzy logical operations in the form of bundles: "AND", "OR", "IF – THEN", "NOT". For example, "IF the angle is low, THEN turn on the engine".
Simulation of the solar panel orientation system in the SimInTech environment. Among all the existing software systems for modeling systems for the project implementation, the choice was made in favor of the Russian development environment-the SimInTech software package [6; 7]. The rationality of using the software is determined by several criteria:
-
- user-friendly block diagram editor;
-
- a wide library of standard blocks;
-
- availability of a visual design module;
-
- built-in programming language.
In terms of characteristics, this option is similar to foreign programs, such as Simulink , SumSim , etc. [8].
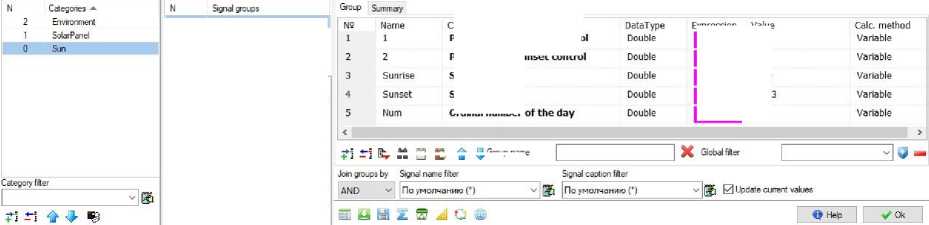
To create a complex mathematical model, such as this project, the models of the main subsystems, implemented as separate projects, are combined into a single package. To link projects to each other, a signal database is used, which is a file database that contains all the necessary variables for the projects to work. Part of the project's signal database is shown in Figure 2.
Editor Settings Netwo* status
Parameter of sunset control
Sunrise point
Sunset point Ordinal number
'a ption
Parameter of sunrise control
W П □ C if -i*Group name
Fig. 2. Signal database
Рис. 2. База данных сигналов
|
1 Param |
|
Group name filter |
|
| По умолчанию (*) ____________ ^ | pp Signal name of filter |
|
I________________________d |
|
Reid of signal |
|
i Value v |
|
Value of field of signal |
|
Ji ri Ф ^ W! ^ tn н |
The solar panel orientation model is a package of projects connected by a single database. The package includes the following projects:
-
– solar panel orientation model;
-
– model for controlling the position of the Sun;
-
- 3D visualization module.
In the first project, a navigation system control unit based on fuzzy logic is implemented (Fig. 3). The substructure provides a subsystem for pointing the installation at the Sun along the X axes ( Xin/Xout -input/output port to the submodel) and Y ( Yin/Yout -input/output port to the submodel): in the vertical and horizontal planes according to a pre-formulated rule base [9].
3D blue

—»| ContrLFiXl] Angle of the X-axis [0 to +90)
System control unit Angle based on fuzzy logic °f th® Y-axis (*90 to +90)
Fig. 3. Schematic of the solar panel orientation model
Рис. 3. Схема модели ориентации панели солнечной батареи
The input effect is the values from the photoelectric sensor located on the panel, which determine its current position in relation to the Sun [10].
The model of the Sun shows the principle of moving an object along a given trajectory (Fig. 4). The scheme defines the main functional parts of the product, their purpose and the relationship between them.
The scheme consists of modules:
-
– list of input signals;
-
– the Sun motion simulator;
-
– the current position of the Sun.
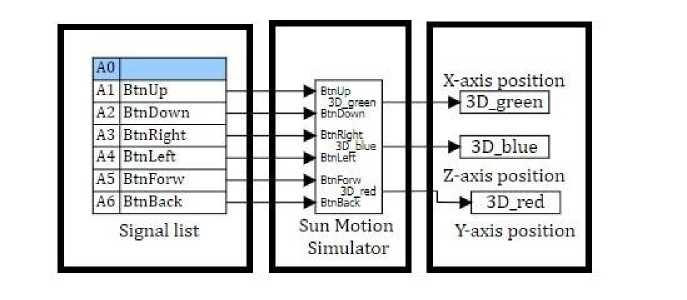
Fig. 4. Model for controlling the position of the Sun
Рис. 4. Модель управления положением Солнца
The submodel "Simulation of the movement of the Sun" contains a control scheme for the motion drive (Fig. 5), from the summation of the incoming setting control signals such as: BtnUp - the movement of the object up, BtnRight – to the right, BtnForw – forward, BtnDown – down, BtnLeft – to the left and BtnBack – back, which activates the necessary keys ( Param_1 – the key for regulating the sunrise point, Param_2 – the key for regulating the sunset) to continue the path of the signals. The incoming signals are combined into a single point, which creates the necessary trajectory.
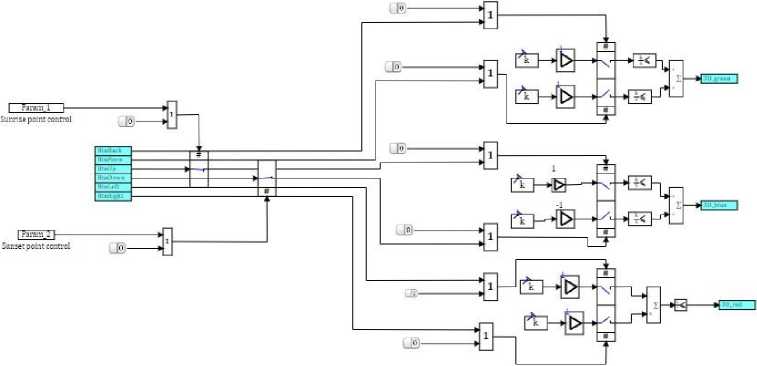
Fig. 5. Composition of the "Sun Motion Simulation" submodel
Рис. 5. Состав субмодели «Имитация движения Солнца»
An animation window is implemented (Fig. 6) with the ability to control the solar object both manually and automatically, according to a given movement, which, first of all, depends on the point of sunrise and sunset. The data is loaded into the system from an external file format . xls , which contain the following information:
-
- ordinal number of the day;
-
- sunrise point;
-
- point of call.
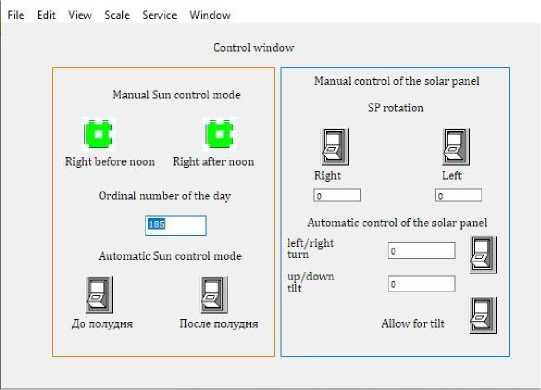
Fig. 6. The appearance of the animation window
Рис. 6. The animation window view
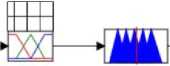
Direct control of the panel in the vertical and horizontal planes is implemented in the submodel "System control unit based on fuzzy logic", the composition of which is shown in Fig. 7.
Phasificaton Variable
(Sun altitude) defuzzification
—► ( Xout I
Angle of tiie panel on the X-axis
| Xio p
Sun altitude
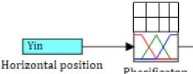
Phasificaton (time of day)
Variable defuzzification
---- Н«я» I
Angle of rotation of the panel on the X axis
Fig. 7. Composition of the "System control unit based on fuzzy logic" submodel Рис. 7. Состав субмодели «Блок управления системой на базе нечёткой логики»
The values obtained from the photoelectric sensor are compared with the current position of the panel relative to the Sun. An error is calculated – the difference between two variables. Depending on the size of the error, a control action is generated on the panel, thereby correcting its position, eliminating the error.
The following linguistic variables are used in this project:
-
– position of the sun (altitude);
-
– position of the sun (horizontal/time of day);
-
– panel tilt angle;
-
– angle of rotation of the panel.
The terms of linguistic variables are described in Table 1.
Terms of linguistic variables
|
Linguistic variable |
Terms (briefly) |
Terms |
|
"Height" |
L |
Low |
|
BA |
Below average |
|
|
A |
Average |
|
|
AA |
Above average |
|
|
H |
High |
|
|
"Time of day" |
S |
Sunrise |
|
D |
Day |
|
|
M |
Midday |
|
|
S |
Sunset |
|
|
N |
Night |
|
|
"Tilt angle – X " "Rotation angle – Y" |
Z |
Zero |
|
S1 |
Small 1 |
|
|
S2 |
Small 2 |
|
|
M1 |
Medium 1 |
|
|
M2 |
Medium 2 |
|
|
B1 |
Big 1 |
|
|
B2 |
Big2 |
The values of the terms are shown in the figures below.
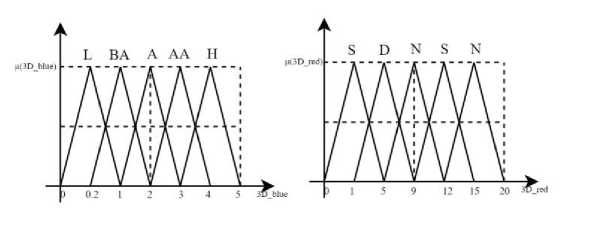
Fig. 8. Linguistic variables "Height of the Sun", "Position of the Sun"
Рис. 8. Лингвистические переменные «Высота Солнца», «Положение Солнца»
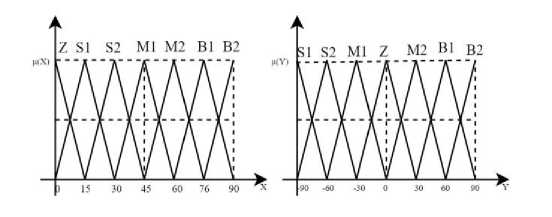
Fig. 9. Linguistic variables "Angle of the X-axis", "Angle of the Y-axis"
Рис. 9. Лингвистические переменные «Угол наклона – X», «Угол поворота – Y»
The formulated rules for the logical output of the output variable, written in the form of a rule base, are presented in Table 2.
Rules for logical output of an output variable
|
Rule number |
Sun Height |
Position of the Sun |
Panel tilt angle – X |
Panel rotation angle– Y |
|
1 |
L |
S |
S1 |
S2 |
|
2 |
L |
D |
S1 |
M1 |
|
3 |
L |
M |
S1 |
Z |
|
4 |
L |
S |
S1 |
M2 |
|
5 |
L |
N |
S1 |
B1 |
|
6 |
BA |
S |
S2 |
S2 |
|
7 |
BA |
D |
S2 |
M1 |
|
8 |
BA |
M |
S2 |
Z |
|
9 |
BA |
S |
S2 |
M2 |
|
10 |
BA |
N |
S2 |
B1 |
|
11 |
A |
S |
M1 |
S2 |
|
12 |
A |
D |
M1 |
M1 |
|
13 |
A |
M |
M1 |
Z |
|
14 |
A |
S |
M1 |
M2 |
|
15 |
A |
N |
M1 |
B1 |
|
16 |
AA |
S |
M2 |
S2 |
|
17 |
AA |
D |
M2 |
M1 |
|
18 |
AA |
M |
M2 |
Z |
|
19 |
AA |
S |
M2 |
M2 |
|
20 |
AA |
N |
M2 |
B1 |
|
21 |
H |
S |
B1 |
S2 |
|
22 |
H |
D |
B1 |
M1 |
|
23 |
H |
M |
B1 |
Z |
|
24 |
H |
S |
B1 |
M2 |
|
25 |
H |
N |
B1 |
B1 |
The project functions as follows: the model of the Sun moves along a given trajectory, which depends on the points of sunrise and sunset, different for each ordinal day. The sun can make movements, both in automatic mode and in operator control mode, which allows controlling the speed of the object. Photovoltaic sensors located on the solar panel transmit information about the current position of the Sun to the input of the system. The difference between the current positions of the panel and the Sun relative to each other is calculated. If there is a difference, the system control unit, based on fuzzy logic, generates a control action on the panel and provides a subsystem for pointing the installation at the Sun in the vertical and horizontal planes according to a pre-formulated rule base.
Minimizing the error in the position of the panel relative to the Sun allows increasing the percentage of energy output due to the optimal angle of incidence of sunlight on the surface of the panel.
The results of the system can be traced in the implemented 3D visualization window (Fig. 10-12). Thanks to the use of fuzzy logic, the panel movement is carried out automatically at an optimal speed and allows adjusting the angle of incidence of sunlight on the panel in a timely manner.
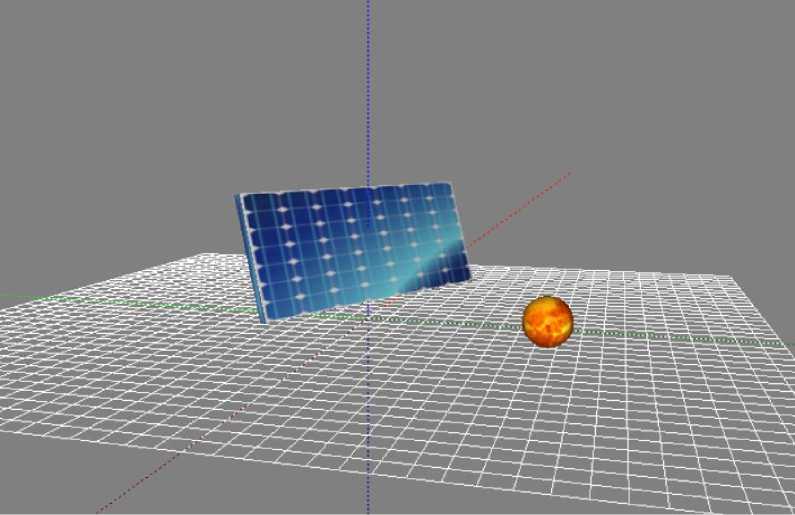
Fig. 10. 3D visualization of the result of system modeling. Part 1
Рис. 10. 3D-визуализация результата моделирования системы. Часть 1
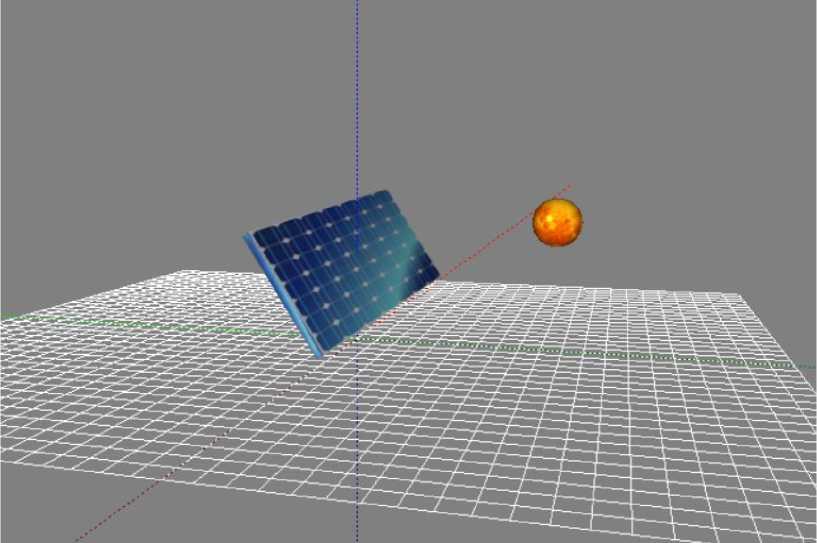
Fig. 11. 3D visualization of the result of system modeling. Part 2
Рис. 11. 3D-визуализация результата моделирования системы. Часть 2
Fig. 12. 3D visualization of the result of system modeling. Part 3
Рис. 12. 3D-визуализация результата моделирования системы. Часть 3
Conclusion. In the dynamic modeling environment of SimInTech technical systems [11-17], a model of an automation object – a solar panel orientation system was developed and implemented using standard blocks of general technical software libraries. A model of the controller based on fuzzy logic was built and tested, the model parameters were adjusted.
It is possible to control the solar object both manually and according to the program, which, first of all, depends on the point of sunrise and sunset. The navigation system of the panel is controlled using fuzzy logic, which ensures accurate pointing of the installation at the Sun in the vertical and horizontal planes according to a pre-formulated rule base.
The rules of logical inference are formulated and presented in a tabular form, the applied linguistic variables and the scales of their terms necessary for controlling the orientation of the solar panel are described.
For a more comfortable display of the system and simplify the perception of the results of its work, a 3D visualization module is implemented. It allows to clearly demonstrate the interaction of objects with each other and monitor the effectiveness of the use of fuzzy control.
The fuzzy logic controller provides the quality of regulation of the position of the solar panel in space comparable to the PID-controller, while providing greater flexibility in configuration, but requires more parameters to be configured, helps to automatically adjust the position of the panel relative to the Sun, maximizing system performance.
Similarly, in the SimInTech dynamic modeling environment, fuzzy controllers can be built to control other similar technological processes.
References Simulation of solar panel orientation system based on fuzzy logic in SimInTech visual simulation environment
- Nefedova L.V. [Experience and prospects of renewable energy in Africa for sustainable development and reduce greenhouse gas emissions]. Vozobnovlyaemaya energetika XXI vek: energeticheskaya i ekonomicheskaya effektivnost': materialy Mezhdunarodnogo Kongressa [Proceedings of the International Renewable Energy Congress – XXI: Energy & Economic Efficiency]. 2016, P. 27–32. (In Russ.)
- Tabakov E. V., Zinina A. I., Kosinsky M. Y. Practical application of the fuzzy logic apparatus in solving the problem of orientation of solar batteries. 44th Academic Space Conference: Dedicated to the Memory of Academician S.P. Korolev and Other Outstanding Russian Scientists – Pioneers of Space Exploration (28–31.01.2020); Bauman Moscow State Technical University Moscow, 2020, Vol. 2318.
- Nzoundja Fapi C. B., Wira P., Kamtal M., Colicchio B. Voltage Regulation Control with Adaptive Fuzzy Logic for a Stand-Alone Photovoltaic System. European Journal of Electrical Engineering. 2020, Vol. 22, No. 2, P. 145–152.
- Spravochnaya sistema SimInTech [SimInTech help system]. Available at: http://help. simintech.ru/ (accessed: 28.02.2021). (In Russ.)
- Zadeh L. Fuzzy sets. Information and control. The journal of symbolling logic. 1965, Vol. 8, P. 338–353.
- Kartashov B. A., Shabaev E. A., Kozlov O. S. et al. Sreda dinamicheskogo modelirovaniya tekhnicheskikh sistem SimInTech: Praktikum po modelirovaniyu sistem avtomaticheskogo regulirovaniya [he environment of dynamic simulation of technical systems SimInTech: Workshop on modeling systems of automatic regulation]. Moscow, DMK Press Publ., 2017, P. 241–243.
- Khabarov S., Shilkina M. Osnovy modelirovaniya tekhnicheskikh sistem. Sreda SimInTech [Basics of modeling technical systems. SimInTech Environment]. Moscow, Lan Publ., 2019, 120 p.
- Monakhov O. Pakety prikladnykh programm MVTU, MATLAB, SIMINTECH i ikh primenenie v uchebnom protsesse na spetsial'nosti “Upravlenie v tekhnicheskikh sistemakh” [Application packages of MSTU, MATLAB, SIMINTECH and their application in the educational process on the specialty “Management in technical systems”]. Moscow, Rossiiskii universitet transporta Publ., 2019, 92 p.
- Entsiklopediya ASUTP [Encyclopedia APCS]. Available at: https://www.bookasutp.ru/ Chapter5_7.aspx (accessed: 28.02.2021). (In Russ.)
- Cabeza-Gras O., Jaramillo-García V. Design of a photovoltaic solar plant: Distributed generation in medium tension to a bar of the electricity substation. Renewable Energy and Power Quality Journal. 2020, No. 18, P. 664–668.
- Ustimenko V. V., Chubar A. V., Myznikova V. A. [Fuzzy Controllers Construction in the SimInTech Environment]. Kosmicheskie apparaty i tekhnologii. 2019, No. 1(27), P. 22–27. (In Russ.)
- Ustimenko V. V., Chubar A.V., Myznikova V.A. [Using of fuzzy controllers in dynamic systems]. Aktualnye problemy aviatsii i kosmonavtiki: materialy V Mezhdunarodnoi nauchno-prakticheskoi konferentsii, posvyashchennoi Dnyu kosmonavtiki [Actual problems of aviation and cosmonautics: materials of the V International scientific-practical conference dedicated to the Day of Cosmonautics]. 2019, Vol. 1, P. 593–594. (In Russ.)
- Ustimenko V. V., Chubar A. V., Rusin D. S. [Application of the genetic algorithm to optimization of a system of controlling of an autonomous object parameters with using an environment of dynamic modelling SimInTech]. Robototekhnika i iskusstvennyi intellekt: materialy XI Vserossiiskoi nauchno-tekhnicheskoi konferentsii s mezhdunarodnym uchastiem [Proceedings of the X Vseross. scientific and technical conference with int. participation “Robotics and artificial intelligence”]. Krasnoyarsk, 2019, P. 261–266. (In Russ.)
- Ustimenko V. V., Chubar A. V. [Construction a fuzzy supervisor in the SimInTech environment for dynamic simulation of technical systems]. Prospekt Svobodny – 2020: materialy XVI mezhdunarodnoj konferencii studentov, aspirantov i molodyh uchennyh [Proceedings of the XVI International conference of students, graduate students and young scientists dedicated to the Year of Memory and Glory “Prospect Svobodny – 2020”]. Krasnoyarsk, 2020, P. 1849–1852. (In Russ.)
- Mikhaylenko L. A. Ustimenko V. V., Chubar A. V. [Construction of the control system of the solar panel orientation process in the SimInTech environment of dynamic simulation of technical systems]. Kosmicheskie apparaty i tekhnologii. 2020, Vol. 4, No. 3(33), P. 178–185. (In Russ.)
- Ustimenko V. V., Rusin D. S., Mikhaylenko L. A., Chubar A. V. [Parametric synthesis of a controller by a metaheuristic algorithm in the SimInTech environment] Kosmicheskie apparaty i tekhnologii. 2020, Vol. 4, No. 3(33), P. 178–185. (In Russ.).
- Ustimenko V. V., Chubar A. V., Mikhaylenko L. A. Automated setting of regulators for automated process control systems in the SIMINTECH visual modeling system. Siberian Journal of Science and Technology. 2020, Vol. 21, No. 3, P. 337–346.
