Синтез динамических параметров дизеля с электронным регулятором частоты вращения

Автор: Гун Валентина Сергеевна, Морозова Вера Сергеевна, Шешуков Виктор Валерьевич, Марьин Александр Евгеньевич
Рубрика: Расчет и конструирование
Статья в выпуске: 11 (144), 2009 года.
Бесплатный доступ
Приводится методика определения зависимостей коэффициентов обратных связей замкнутого контура управления частотой вращения дизеля с электронным регулятором от заданного времени переходного процесса. Для реализации методики разработан пакет прикладных программ.
Динамические параметры, электронный регулятор, контур управления, коэффициенты обратных связей, сигнал рассогласования, относительное отклонение, автоколебания, собственные значения матрицы, характерное время релаксации, отклонение частоты вращения
Короткий адрес: https://sciup.org/147151460
IDR: 147151460 | УДК: 621.436:629.113+517.977
The design of the rotation frequency control system with prescribed dynamic parameters
Closed loop feedback system of the diesel rotation frequency is considered. The method of feedback coefficients computation is provided. The method allows one to select feedback coefficients in such a way that the transient behavior (change of the rotation frequency) has a prescribed duration. The mathematical model and the software package are developed.
Текст научной статьи Синтез динамических параметров дизеля с электронным регулятором частоты вращения
Под синтезом понимают определение структуры системы автоматического регулирования частоты вращения дизеля (САРЧ) и значений параметров ее элементов, обеспечивающих выполнение заданных требований: статической точности поддержания регулируемой координаты, устойчивости и качества работы системы регулирования [1].
Качество работы САРЧ определяется алгоритмом (законом) подачи топлива в переходных режимах дизеля. Оптимизация переходного процесса регулирования частоты вращения рассматривается как задача оптимального быстродействия. В итоге синтез САРЧ сводится к выбору параметров контура управления, обеспечивающих апериодический переходный процесс с минимальной длительностью при ограничении тока якоря исполнительного механизма [2].
Спроектированный на кафедрах «Двигатели внутреннего сгорания» и «Электротехника» ЮУрГУ совместно с АО «УРАЛТРАК», электронный регулятор частоты вращения для дизеля Д-160 представляет собой замкнутую многосвязную САРЧ. Схема электронного регулятора содержит регуляторную и корректорную ветви управления, каждая из которых обрабатывает сигнал рассогласования по частоте вращения в зависимости от показаний датчика частоты (корректорная ветвь от 1150 мин-1 до 1300 мин-1, регуляторная ветвь - от 1300 мин-1 до 1350 мин-1), а также блок управления пуском и установившимися режимами (100... 1000 мин-1, 1000... 1150 мин-1).
Электронный регулятор при этом выполняет все функции всережимного механического регулятора и кроме того, даёт возможность изменять внешнюю характеристику, обеспечивать определенность и стабильность корректорного участка, форсировать двигатель без перегрузки до 178 кВт, изменять угол наклона регуляторной ветви характеристики до 90° и улучшать динамические показатели переходных процессов.
В контур управления (рис. 1) регулятора частотой вращения дизеля (РЧВ) введены четыре обратные связи: по положению рейки топливного насоса высокого давления (ТНВД) - ко, по скорости её перемещения - ^, по току исполнительного механизма (ИМ) - к2, по частоте вращения коленчатого вала - кз. Последняя (кз) является основной, влияющей на динамику всей системы. В качестве ИМ спроектирован линейный электродвигатель постоянного тока (ДПТ) [3].
Гун В.С., Морозова В.С., Синтез динамических параметров дизеля
Шешуков В.В., Марьин А.Е. ___________________ с электронным регулятором частоты вращения
Обратная связь по положению рейки ТНВД предназначена для обеспечения необходимого диапазона перемещения рейки. Для улучшения статических и динамических свойств системы введена обратная связь по производной сигнала положения рейки ТНВД с помощью дифференциатора. Обратная связь по току ИМ защищает обмотку якоря ДПТ от перегрузок. Обратная связь по частоте вращения коленчатого вала необходима для поддержания её величины.
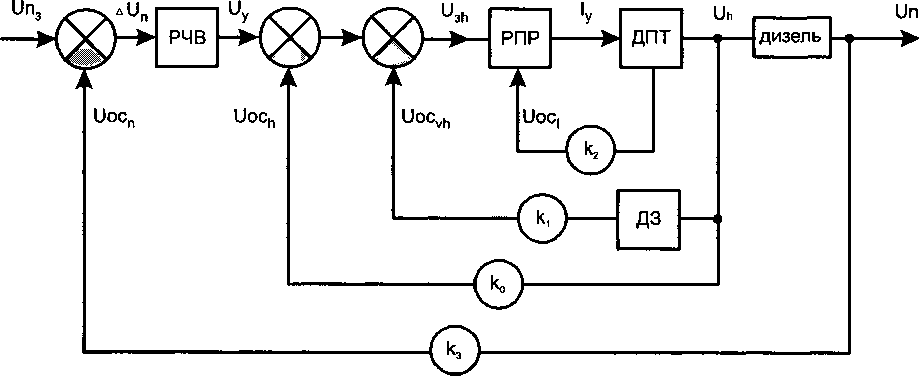
Рис. 1. Структурная схема контура управления частотой вращения коленчатого вала:
Un3, Un -напряжения с датчиков педали управления и частоты вращения коленчатого вала, AUn - сигнал рассогласования по частоте вращения коленчатого вала, Uy, ly - напряжение управления и ток якоря ДПТ, Uh - напряжение с датчика положения рейки, Uocn, Uoch, UocVh, Uoc, - напряжения обратных связей по частоте вращения, по перемещению рейки, скорости перемещения рейки и току соответственно, ДЗ -дифференцирующее звено, РПР - регулятор положения рейки
Динамическое равновесие САРЧ тракторного дизеля с электронным регулятором описывается системой уравнений [4].
Uh — = v; dt dv Bl . c I dt M M di R. Bl kn . k, k3 . кЛ U --=--Z--V----Lv----+--; dtLLLLLLL dt
Здесь i - ток якоря электромагнита; U - напряжение на обмотке якоря; h - положение рейки ТНВД; М- масса якоря; R - сопротивление обмотки якоря; с - электромеханический коэффициент; L - индуктивность якоря; / - длина обмотки якоря; кд - коэффициент самовыравнивания; Тд - постоянная времени собственно дизеля; v - скорость рейки ТНВД; В - магнитная индукция, создаваемая обмоткой возбуждения; ко - коэффициент обратной связи по положению рейки; ку - коэффициент обратной связи по скорости перемещения рейки; кг - коэффициент обратной связи по току исполнительного механизма; ко - коэффициент обратной связи по частоте вращения дизеля.
Под параметрами Р и ф понимаются относительные отклонения от стационарного режима работы: Р = MilЬм,ф=-kn!nst, где hsl - стационарное положение рейки, Д/г - отклонение рейки от стационарного положения, nst - установившаяся частота вращения, Ап - отклонение от установившейся частоты вращения.
В матричной форме система уравнений, описывающая динамику отклонений от стационарного режима работы, записывается в виде:
Расчет и конструирование
L
-с/
/М
О
о
/М
О
где A - матрица системы. Собственное значение этой матрицы находим из определителя. Запишем характеристическое уравнение системы:
U-xeUx4+x3 ^+-+-(К+к2) +
I I Т М Lx
д
+я2
+ я
к д
т
_ д
__д_ т '
д
М L
с 1 "мТ
с 1 "мё
5LL М L
т,ив1+к^ +
М L
В1 к0 "м^
^ ^о ^д , nst ^з
MET hst L ’
где Е - единичная матрица, ХЕ — диагональная матрица.
Переходный процесс будет апериодическим, если все собственные значения матрицы А представляют собой действительные числа Х\, Х^ Яз, Х^ [6]. Уравнение относительно собственных значений будет иметь вид:
Ц-ХЁ^ЦХ-Х^Х-Х^Х-ХзХХ-Хд^
— % + X (— 1ХД + Д "*" Д + Хд) + % (Д Д + Х^Х; + Д Я4 + Д Д + ДЯ4 + Х^Хд)+ + Х^— 1ХДДЯ4 + Х^Х, + ДДЯ4 + ДДЯ4)+ХуХ^Х^Хд.
Приравнивая (3) и (4), получаем систему уравнений для определения коэффициентов обратных связей:
" + ™ + "С^ + ^2)-(~1)(Д + Д + Д + Я4}, 1 д
д
— *Цв*кгШ—Цв*кгУ—Цвикх^ = М Lx 2JMLX 22 М Lx u
= (ДД + ДД + ДЯ4 + Д Д + ДЯд + ДЯ4);
М—-^К*кг\
Т \М Lx
д 4
mVtr hst l
--(Bl + Д) I + —= (—1)(ДДЯ4 + ДДД + ХуХзХд + ДДЯ4}, ML ML
— Д Д ДЯд.
Для определения коэффициентов обратной связи допустим, что все собственные значения равны между собой [7].
Известно, что Я = -т "Д где т - характерное время релаксации. С учётом этого, найденные коэффициенты обратных связей выражаются через время релаксации следующим образом:
Гун В.С., Морозова В.С., Шешуков В.В., Марьин А.Е.
Для реализации методики был разработан пакет прикладных программ расчета коэффициентов обратной связи и переходных процессов дизельных двигателей. Результаты расчета переходных процессов дизеля Д-160 представлены на рис. 2.
Параметры электронного регулятора: 5=0,5 Тл, 5=0,02 Гн, /=60 м, 45=0,75 кг, 5=12 Ом, с=60. Ток якоря электромагнита ограничен величиной 5 А.
Параметры дизеля: Тд = 4,4338 с, 5Д = 10,356, hst = 0,01, nst = 1250 мин-1, т = 0,5 с.
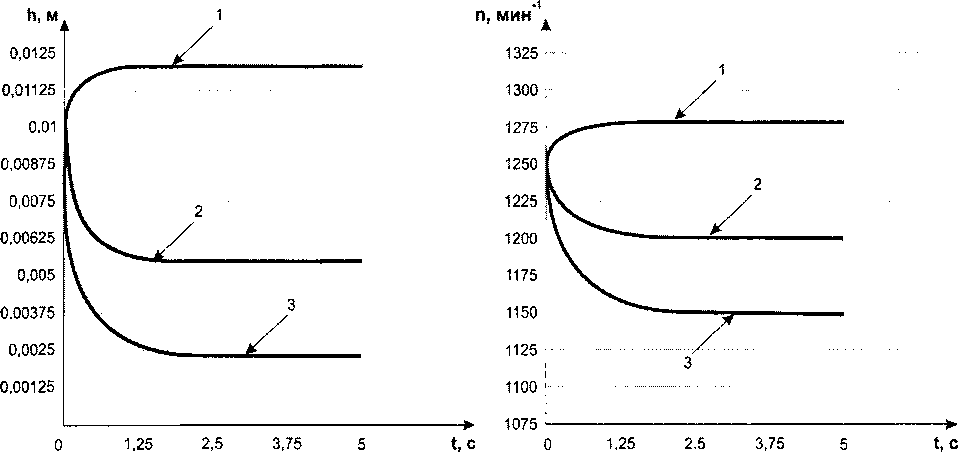
Рис. 2. Переходные процессы дизеля Д-160 при его работе на корректорном участке характеристики: h - перемещение рейки ТНВД, п - частота вращения, 1 - Дп = 25 мин-1, 2 - Дп = -50 мин-1, 3 - Дп = -100 мин
Длительность и динамика переходных процессов практически совпадает с экспериментальными данными [5].
Предложенная методика позволяет на этапе проектирования дизеля с электронным регулятором:
-
- выбрать исполнительный механизм привода рейки ТНВД и оценить его динамические качества;
-
- рассчитать коэффициенты обратных связей контура управления электронного регулятора при его работе на корректорном и регуляторном участках скоростной характеристики;
-
- оценить экологические и экономические показатели проектируемого дизеля в зависимости от длительности переходного процесса [5].
Расчетч^конструирование
Список литературы Синтез динамических параметров дизеля с электронным регулятором частоты вращения
- Основы теории автоматического регулирования/В.И. Крутое, Д.М. Данилов, П.К. Кузьмин и др. -М.: Машиностроение, 1984. -386 с.
- Алексеев, В.М. Оптимальное управление/В.М. Ачексеев, В.М. Тихомиров, C.B. Фомин. -М.: Наука, 1979. -408 с.
- Пат. 2066386 Российская Федерация, МПК7 RU S16F02D1/08, 1/18. Электронный регулятор частоты вращнния для управления подачей топлива топливным насосом высокого давления/В.В. Шешуков, В.М. Бунов, С.И. Гладышев и др. -№ 93055194/06; заявл 10.12.93; опубл. 10.09.96, Бюл. № 25. -8 с.
- Гун, B.C., Оптимизация переходных процессов системы топливоподачи дизеля с электронным регулятором/B.C. Гун, B.C. Морозова, В.В. Шешуков//Вестник ЮУрГУ. Серия «Машиностроение», 2007. -№ 10. -С. 56-62.
- Bunov, V.M. Algorithmic maintenance of a diesel engine electronic fuel controller by criterion of the contents of soot in exhaust gas/V.M.Bunov, V.S Morozova, V. S Goon,..//SAE WorldCongress -12-19 Apr., 2007. -№ 07PFL-452. -P. 11-16.
- Попов, Е.П., Теория линейных систем автоматического регулирования и управления/Е.П. Попов. -М.: Наука, 1989. -301 с.
- Крутов, В.И. Анализ работы систем автоматического регулирования/В.И. Крутов. -М.: Государственное научно-техническое издательство машиностроительной литературы, 1961.-179 с.
