Синтез корректирующего контура цифровой системы регулирования низкой чувствительности

Автор: Кудряшов Владимир Сергеевич, Рязанцев Сергей Васильевич, Иванов Андрей Валентинович, Свиридов Дмитрий Алексеевич
Журнал: Вестник Воронежского государственного университета инженерных технологий @vestnik-vsuet
Рубрика: Информационные технологии, моделирование и управление
Статья в выпуске: 3 (53), 2012 года.
Бесплатный доступ
Рассмотрена реализация и исследование работоспособности алгоритма синтеза корректирующего контура цифровой системы регулирования низкой чувствительности, позволяющего уменьшить дополнительное движение, возникающее вследствие наличия у объекта регулирования нестационарных свойств.
Корректирующий контур, цифровая система регулирования, модель чувствительности
Короткий адрес: https://sciup.org/14039898
IDR: 14039898 | УДК: 681.5
Synthesis of a correcting contour of digital system of regulation of low sensitivity
In this article considers implementation and research working capacity of the synthesis algorithm of correction contour of digital control system of low sensitivity, allowing to reduce the additional motion that arises due to the presence at the object of regulation non-stationary properties.
Текст научной статьи Синтез корректирующего контура цифровой системы регулирования низкой чувствительности
Одноконтурные системы автоматического регулирования (САР) широко используются в процессах пищевой и химической технологии.
Улучшить качество переходных процессов в таких системах позволяет оптимизация настроек регуляторов, однако наличие у большинства объектов нестационарных свойств приводит к ухудшению динамики САР со временем их эксплуатации.
К решению данной задачи есть несколько подходов. Первый заключается в проведении повторной идентификации модели объекта управления с последующей перенастройкой регулятора, что не всегда технологически осуществимо. Кроме того, немаловажным является определение момента перенастройки в таких системах.
Второй подход связан с синтезом и реализацией адаптивных САР. Среди недостатков данного подхода можно выделить длительность процедуры текущей идентификации и перенастройки регулятора, что затрудняет использование данных систем, например, для малоинерционных процессов.
Рассматриваемый в данной статье третий подход, заключающийся в применении одного из методов теории чувствительности при проектировании САР, в отличие от приведённых выше обеспечивает требуемые динамические свойства систем в процессе их функционирования.
Свиридов Д.А., 2012
Однако долгое время он не имел практического применения по причине наличия большого числа сложных математических преобразований и вычислений, ограниченных возможностей цифровой вычислительной техники. Современные вычислительные средства, обладая высокой производительностью, дают широкие возможности практического использования методов, основанных на теории чувствительности.
Поэтому актуальной становится задача разработки алгоритма синтеза цифровой САР с применением методов теории чувствительности.
Алгоритм синтеза корректирующего контура. Будем считать, что задана исходная САР, для которой известны передаточная функция (ПФ) замкнутой системы Ф ( s ) (рис. 1) и максимально возможные вариации параметров в течение заданного интервала времени эксплуатации:
**0
Aaj = aj - a p j = 1, g, где a0j – номинальное значениe j-го парамeтра ПФ объeкта; a*j – допустимoe значeʜиe j-го па-рамeтра; g – общee число варьиpyeмых пара-мeтров.
Низкая чувствитeльность САР к проявлe-нию ʜecтационарных свойств объeктa peгули-рования достигaeтся путём ʙʙeдeʜия в замкнутую систeму дополнитeльногo ʙʜeшʜeго кор - ректирующего контура (рис. 1), в котором реализуется компенсация дополнительного движения системы за счёт использования функций чувствительности [1].
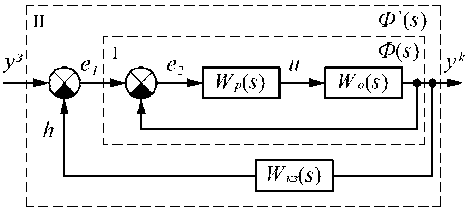
Рис. 1. Структурная схема одноконтурной САР низкой чувствительности: I - основной контур; II -корректирующий контур; W p ( 5 ), W o ( 5 ), W кз( 5 ) - ПФ регулятора, объекта и корректирующего звена (КЗ); Ф ( 5 ) - ПФ замкнутой системы; Ф '( 5 ) - ПФ замкнутой системы с КЗ; У - задающее воздействие; e 1 , e2 -величины рассогласований; и - управляющее воздействие; У - выход САР; h - коррекция задающего воздействия
Анализируя функции чувствительности
д Ф (5)
---—, j = 1, g, входящие в состав логарифми-д aj ческих функций чувствительности:
u ( 5 ). =
д ln ( Ф ( 5 ) ) д Ф ( 5 ) a j
д ln ( a j )
д a j Ф ( 5 ) ,
j = 1, g , (7)
ПФ замкнутой системы с КЗ имеет вид
можно определить степень влияния каждого параметра модели объекта регулирования на динамические свойства САР [2] и включить в закон коррекции только необходимые функции (7).
Используя приведённую модель чувствительности (МЧ) (7) - совокупность отобранных логарифмических функций чувствительности, преобразуем уравнение (6) к следующему виду:
. . g А a, д ln ( Ф ( 5 ) )
А Ф ( 5 ) = Ф ( 5 )^ - j ( ) . (8)
j = 1 a j д ln ( a j )
Подставив уравнение (8) в (5), получим ПФ КЗ со связями по функциям чувствительно-
сти:
0 '( 5 ) =------ . ( 5 ) , . .
1 + О ( 5 ) • W^ ( 5 )
Отклонения параметров ПФ объекта в
исходной системе приводят к вариации А Ф ( 5 ),
что влечёт за собой изменение ПФ (1):
0 5 . = 0 ( 5 ) + А 0 ( 5 )
’ 1 + ( О ( 5 ) + А 0 ( 5 ) ) • W -s ( 5 )
.
g А a * д ln ( Ф ( 5 ) )
= 1 a 0 д ln ( a, )
Wk3 ( 5 ) =---------. (9)
Ф ( 5 ) g А aj д ln Ф ( 5 ))
1 jУ •^ Ы
При получении итоговой формулы (9)
Определим ПФ КЗ, используя условие компенсации дополнительного движения САР:
Ф '( 5 ) = Ф ( 5 ) . (3)
Подставив условие (3) в уравнение (2),
получим:
О ( 5 ) = 0 ( 5 > +А 0 ( 5 ) „ .
' 1 + ( 0 ( 5 ) + А 0 ( 5 ) ) • W „ ( 5 )
Из уравнения (4) выразим ПФ КЗ:
W ( 5 ) =_______ А 0 ( 5 ) _______
0 ( 5 ) • ( 0 ( 5 ) + А 0 ( 5 ) ) ’
допущением является замена неизвестных текущих А a j и a j на заданные А a * и a 00 при расчёте МЧ (7) и вариации А Ф ( 5 ) (8). В противном случае необходима процедура текущей идентификации и дальнейшая постоянная перенастройка коэффициентов ПФ (9).
С учётом формулы (9) полная структурная схема системы с корректирующим контуром со связями по функциям чувствительности примет следующий вид (рис.2) [1].
или в следующей форме:
W ( 5 _Д_. А 0(5 )/*) . e?v ’ 0 ( 5 ) 1 + А 0 ( 5 )/ 0 ( 5 )
С точки зрения теории чувствительности вариацию А Ф ( 5 ) можно расписать следующим образом [1]:
g д Ф (5)
А Ф ( 5 ) = 1—^А fly , (6)
j = 1 д a j
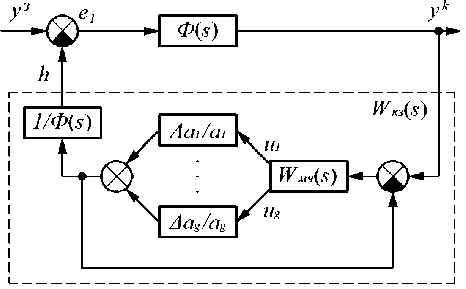
Рис. 2. Полная структурная схема одноконтурной САР со связями по функциям чувствительности: WM4 ( 5 ) - модель чувствительности; и 1 , ..., ug - выходы МЧ
где А a j - текущие вариации параметров САР.
Дискретное математическое описание алгоритма. Для реализации корректирующего контура САР низкой чувствительности (рис. 2) с помощью средств цифровой вычислительной техники необходимо иметь математическое описание в дискретной форме КЗ, для получения которого необходимо представить ПФ (9) в
Исследование работоспособности алгоритма. В качестве объекта для исследования работоспособности алгоритма синтеза корректирующего контура цифровой САР низкой чувствительности примем модель основного кана
следующем виде:
W k3 ( s ) =
а п • s n + а п - 1 • s n - 1 + ... + « 1 • s + а 0 (10)
P m • S m + P m - 1 • S m - 1 + ... + P i • S + в о
ла системы управления процессом синтеза аммиака в четырёхполочном реакторе: «расход по байпасу азотоводородной смеси - температура в слое катализатора» [4].
ПФ объекта и ПИ-регулятора соответ
Следует отметить, что в формуле (10) а 0,..., a n и P 0,..., P m являются функциями
ственно равны:
только номинальных значений параметров ПФ объекта a 0 и их максимальных вариаций
W o ( s ) = T . ■ • W p ( s ) =+ Т
ПФ замкнутой системы:
A a * , j = 1, g .
Воспользовавшись тем, что ПФ КЗ
, . ~ h ( s )
(рис. 2) есть отношение , \ \ , перейдём к y k ( s )
дифференциальному уравнению:
Ф ( s ) =
к -к ■ s + k -к ор оi
T • s 2 + ( ко-к р + 1 ) • s + ко' ki
Для получения параметров дискретных моделей [3] примем такт квантования T 0=2 с и воспользуемся формулами перехода (13):
P,/-^ + Л .' m dt m m — 1
d m — 1 h ( t )
dt m — 1
+ ... +
a = TL^Tl b = kATL
Г ’ T ’ T 1 T 1
q 0 = kp , q i = ki- T 0 - kp ,
+Pv
dh (t) о , / x
,, + p0 •h(t) = dt
где a , b - параметры дискретной модели объекта; q 0, q 1 - настроечные параметры цифро
= ап
d n y k ( t )
——— + а
d n — 1 y k ( t )
+а 1 •
dtn dyk ( t ) dt
П — 1 ' df — 1
+ а 0 - y k ( t ).
+ ... +
При малых тактах квантования T 0 из дифференциального уравнения (11) можно получить разностное путём дискретизации. Приближённо заменим дифференциалы в уравнении (11) правыми разностями [3]:
вого регулятора.
Настройки q 0, q 1 рассчитаны из условия минимума интегральной квадратичной ошибки.
Численные значения номинальных и возможно допустимых значений параметров модели объекта регулирования, а также их максимальные вариации приведены в табл. 1.
Pm’
A m h i
m
T 0
R A m — 1 hi
+ P - —Г - —1 + ... +
T 0
. Ah
+ P r "V" T0
+ P 0 Л =
= ап
A n
yk
— + а
n
T 0
n - 1
A n - 1 y k
----v- +... + rp n — 1
T 0
A y* k
+ а1 • — + а0 • yi .
T 0
Уменьшим текущий индекс такта квантования на единицу в левой и правой частях уравнения (12) и выразим из него h i :
P 0 ,..., P - , h — ! ,..., h - - , kk
.
Таблица 1
Πaрaметры модели объектa
|
Параметры |
Номинальные значения параметров ПФ объектa |
Максимальные значения вариаций параметров ПФ объектa |
Допустимые зʜaчения пaрaметров ПФ объектa |
|
|
о S са о о § к |
kо |
3,4 ° С/% |
-20% |
2,72 |
|
T 1 |
102 с |
+15% |
117,3 |
|
|
S У & г^ |
a |
0,98 |
+0,003 |
0,983 |
|
b |
0,067 ° С/% |
-0,021 |
0,046 |
|
Неизменные при моделировании оптимальные настройки аналогового и дискретного регулятора:
кр = 1,34; ki = 0,044;
Представим ПФ (16) в форме дифференциального уравнения:
в d 3 h (t t^^B в3 • +в2 •
d 2 h ( t )
q о = 1,34; q i =- 1,251.
Далее составим МЧ, для чего определим функции (7), которые будут входить в закон коррекции:
_ 6In(О (s)) _
()1= d in (ко) "
( Т • s +1)- s
T 1 • s 2 + ( k 0 • k p + 1 ) • s + k о • ki
_ aIn (0 (s)) _
( 1 a in (т)
= а 4 •
От
- T 1 • s 2
Т1 • s 2 + ( к о • k p + 1 ) • s + к о • k i
Подставив МЧ (14) в формулу (9), выведем ПФ КЗ:
W ( s ) = А- e?V } О ( s )
А 7 * А т *
A k A T
— • u (s)1 + ' • u (s)2
--Ч------Ч-----, (15)
A кA T
1+Т" •u (s )+ /' •u (s )2
где A к * и A Т 1* - максимальные вариации коэффициента усиления и постоянной времени модели объекта регулирования в течение ин
тервала времени его эксплуатации.
Из (15) получим отношение полиномов (1о):
W k3 ( s ) =
4 . , 3 . _ 2 . .
а • s + а • s + а • s + а • s + а
—---------------1------о, (16)
в3 • s3 + в2 • s2 + в1 • s + во
где
а4 =(AТ • к0-Aк* • T1 )• Т;
аз =(AТ • к* -Aк* • T)•(к* • кр + 1) —Aк* • Т;
а 2 = (A Т • к* - A к* • Т1 ) • к* • ki — A к* • (к* • кр + 1);
а 1 =- к * • k i •A к * ;
а о = о;
вз =(A Т • к* -A к* • Т1 - к* • Т1 )• к* • кр;
-
в2 = (A Т1 • к* - A ко • Т1 - к* • Т1 ) • к* ' ki —
-
— (к*2 • кр + к* + Aко ) • к* • кр ;
-
в1 = -(к*2 • к р + к* + A ко ) • к* • к р - к*3 • ki • кр ;
-
во =-к* • к/.
+ в1 •
dt 2 dh ( t )
dt
+ в о • h ( t ) =
d 4 ук ( t )
dt 4 +а 3
+ а 2 •
•
d 3 ук ( t )
dt 3
d 2 ук ( t ) dt 2
+
+ а dy " ( t )
+ а 1--- —. (1/)
dt
дифференциального уравнения (17)
перейдём к разностному [3]:
в 3 • h i + i
—
3 • h i + 3 • h i
—
+ в 2 • h i 1 1
+в1 •
h i + 1
= а 4 •
—
—
T То
У м
k
+ а 3 • y i + 1
k
+ а 2 • y i + 1
Т о 2 • h + h — 1 Т о2 h i - + в о • h =
h
-J-2 +
—
4 • У к + 6 • yt
—
4 Т о
3 • у к + 3 • у к — 1 — у к — 2
— 4 • yki-2 + yki-3 +
Т о3
— 2 • у к + y ^1
Т о
+ а1 •
+
Ук + 1 — yk i
Т То
.
В результате получим сложное разност -ное уравнение третьего порядка относительно h i :
в о ,
а 1 ,
..., в 3 , h — 1 ,..., h — 3 , kk
...,
.
Для оценки работоспособности алгоритма получим отклик цифровой САР на единичное ступенчатое воздействие при номинальных значениях параметров модели объекта регулирования. Для этого рассчитаем переходный процесс по заданию в замкнутых системах: без КЗ (18) исКЗ (19):
ui = ui — 1 + q о • ( У з — y ) + q 1 • ( У в1 — y — 1 ) ,
. У1 + 1 = a • У1 + b • ui ,
i = 1, N .
в о ,..., в 3 , h — 1 ,..., h — 3 , kk
а 1 ,
...,
,
ui = ui — 1
+ q о • (yi — hi — yi )
+ q1 • ( y! — 1
.yi+1 = a • у" + b • ui,
— h i — 1 — у к — 1 ) ,
i = 5, N .
Динамические характеристики в прира-
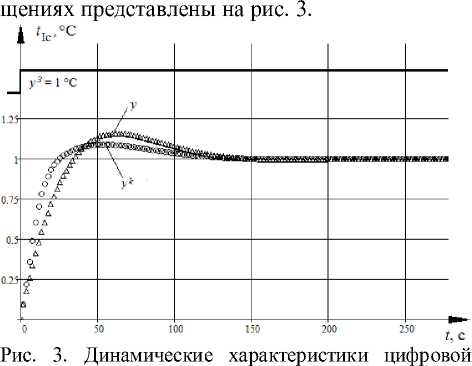
САР при номинальных значениях параметров ПФ объекта: у - замкнутой системы без КЗ; yk - замкну той системы c КЗ
Аналогично осуществим расчёт переходных процессов (рис. 4) замкнутых систем при допустимых значениях параметров ПФ объекта
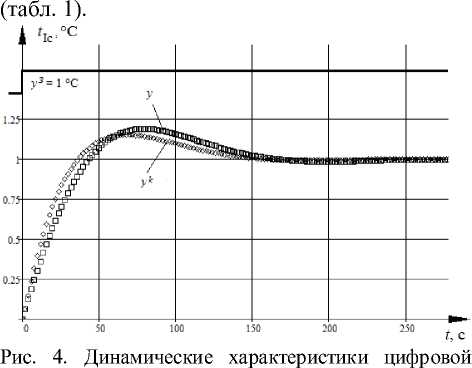
САР при допустимых значениях параметров ПФ объекта: у - замкнутой системы без КЗ; y k - замкнутой системы c КЗ
Проведём расчёт переходных процессов замкнутых систем при следующих промежуточных значениях параметров объекта регулирования:
k = 3,06 °N/%; T 1 = 109,65 c; или в дискретной форме:
a = 0,982; b = 0,056 °N/%.
По критерию
N \2
s = ^ ( у■ - y,)
j = 1 осуществим расчёт значений интегральноквадратичной ошибки для всех рассчитанных вариантов (табл. 2).
Таблица 2
Интегрально-квадратичная ошибка
|
САР |
Значения параметров модели объекта регулирования |
||
|
Номинальные |
Промежуточные |
Возможно допустимые |
|
|
Без КЗ |
10,681 |
12,44 |
14,56 |
|
С КЗ |
7,248 |
9,021 |
11,24 |
Переходный процесс системы с КЗ при возможно допустимых параметрах объекта практически полностью совпадает с переходным процессом системы без КЗ при номинальных параметрах объекта. Отсутствие полного совпадения объясняется наличием допущений при синтезе КЗ.
Алгоритм синтеза корректирующего контура цифровой системы регулирования низкой чувствительности работоспособен и обеспечивает требуемые динамические свойства. При увеличении вариации параметров динамическая характеристика системы с КЗ обладает свойством приближения к динамической характеристике системы без КЗ при номинальных параметрах модели объекта.
