Синтез программного и финитного законов движений в аналитических моделях управления конечным состоянием биомеханических систем

Автор: Загревский Валерий Иннокентьевич, Загревский Олег Иннокентьевич
Журнал: Человек. Спорт. Медицина @hsm-susu
Рубрика: Спортивная тренировка
Статья в выпуске: 1 т.19, 2019 года.
Бесплатный доступ
Цель. Разработать компьютерную программу моделирования движения объекта с заданной начальной и конечной скоростью и фиксированным временем перемещения. Материалы и методы. Анализ как метод биомеханики позволяет дать оценку биомеханического состояния спортсмена в реально выполняемых спортивных упражнениях. Функция синтеза движений - возможность предсказать траекторию и поведение биомеханической системы в заданных опорных точках фазовой структуры моделируемого движения. Рассматривается один из методов биомеханического синтеза движений: синтез управления конечным состоянием биомеханических систем, основанный на приведении финитного управления к заданному программному управлению после затухания переходной составляющей ускорения. Математическое описание движения объекта основано на известном законе финитного управления с обратной связью. Интегрирование математической модели, построенной в форме дифференциального уравнения второго порядка, осуществлялось одним из численных методов интегрирования: методом Рунге-Кутты четвертого порядка точности. Рассмотрение метода построено на математическом аппарате моделирования, описывающем движение материальной точки, в качестве которой может быть выбран общий центр масс биомеханической системы, сустав, центр масс сегмента и т. п. Результаты. Математическая модель движения материальной точки с заданными кинематическими параметрами движения в начальный и конечный моменты времени реализована в компьютерной программе в языковой среде Visual Basic 2010 на базе интегрированной среды разработки Visual Studio Express 2013. На выходе обеспечивается числовая и визуальная поддержка результатов моделирования. Заключение. Показано, что разработанная компьютерная модель метода всегда реализует цель движения: перевести объект из заданного начального состояния по скорости в заданное конечное состояние за фиксированное время перемещения.
Техника упражнения, биомеханическая система, управление, анализ, синтез
Короткий адрес: https://sciup.org/147231852
IDR: 147231852 | УДК: 796.012 | DOI: 10.14529/hsm190113
Synthesis of program and finite laws of motion in analytical models of control of the final state of biomechanical systems
Aim. The article deals with developing a computer program to simulate the movement of the object with a given initial and final speed and fixed travel time. Materials and methods. The analysis, as a method of biomechanics, allows us to assess the biomechanical state of the athlete in real sports exercises. The function of motion synthesis is the ability to predict the trajectory and behavior of the biomechanical system at specified reference points of the phase structure of the simulated motion. The article deals with one of the methods of biomechanical synthesis of movements: synthesis of control of the final state of biomechanical systems, based on the reduction of finite control to a given program control after attenuation of the transient component of acceleration. The mathematical description of the object motion is based on the known law of finite control with feedback. Integration of the mathematical model constructed in the form of the differential equation of the second order was carried out by one of the numerical methods of integration: Runge-Kutta method of the fourth order of accuracy. Consideration of the method is based on a mathematical apparatus describing the motion of a material point, which can be represented by a common center of mass of a biomechanical system, a joint, a center of mass of a segment, etc. Results. The mathematical model of the motion of a material point with the given kinematic parameters of motion at the initial and final moments is implemented in a computer program in the Visual Basic 2010 language environment based on the integrated development environment Visual Studio Express 2013. The output provides numerical and visual support for simulation results. Conclusion. It is shown that the developed computer model of the method always implements the goal of motion: to transfer an object from a given initial state by speed to a given final state for a fixed time of movement.
Текст научной статьи Синтез программного и финитного законов движений в аналитических моделях управления конечным состоянием биомеханических систем
Аналитический синтез управляющих воздействий спортсмена целесообразно рассмат- ривать с позиций теории автоматического управления (ТАУ), моделирования [1, 6, 7, 14, 16, 17] и робототехники [3, 15, 19, 20, 22]. В ТАУ выделяют такие виды управления, как программное и финитное [13, 18, 21].
В соответствии с терминологией, принятой в теории управления [18, с. 18]: «Финитное управление (Fixed-timecontrol) – управление, цель которого заключается в переводе объекта управления из заданного начального состояния в заданное конечное состояние за ограниченное время». Здесь время процесса перемещения объекта заранее указывается, а начальное и конечное состояние объекта регламентируется его координатами.
Определение программного управления
(Programmedcontrol) следует из источника [18, с. 18]: «Управление, при котором значения управляющих и (или) управляемых координат изменяются в соответствии с заданной программой».
В настоящем исследовании биомеханиче- ская система рассматривается как материаль- ная точка, за которую можно принять, например [9], общий центр масс биосистемы, а также суставы опорно-двигательного аппарата тела человека, центр масс сегментов и т. п.
В работе [2] выделяются следующие виды движений, для которых выполняется синтез программного и финитного управления на уровне материальной точки: разгон, приведе- ние, разомкнутое по времени сближение, замкнутое по времени сближение. В рамках настоящей статьи рассматривается алгоритм синтеза программного и финитного управлений для биомеханической системы, совершающей разгон, что и актуализирует тему исследования.
Результаты исследования. Алгоритм синтеза программного и финитного управлений для биомеханической системы . Введем обозначения для фазовых координат биомеханической системы (материальная точка):
S0 – начальное фазовое состояние объекта движения по координате;
V 0 – начальное фазовое состояние объекта движения по скорости;
Sk – конечное фазовое состояние объекта движения по координате;
Vk – конечное фазовое состояние объекта движения по скорости.
Соответственно: u = V, V, S - ускорение, скорость и перемещение объекта управления.
Сформулируем задачу управления. Пусть известны параметры начального фазового состояния объекта управления по скорости [ V 0 ]. Требуется за время T перевести объект в конечное фазовое состояние [ V k ].
Известный программный закон управления, разомкнутый по управляемой фазовой координате V [2, с. 18], для модели разгона материальной точки представим в следующем виде:
V = V o + VT t, при t G [ T o ; T o + T ]. (1)
Из (1) следует, что постоянное ускорение ( u ) равно
V u = —
V 0
T
.
Если текущее фазовое состояние объекта считать начальным, то, заменив V 0 в (2) на текущую скорость V , а заданное время разгона T соответственно на оставшееся время T – t , получим закон управления с обратной связью [2]
u =
V k - V T - t "
Здесь t отсчитывается с момента времени начала разгона. Из (3) следует, что в момент времени t = T знаменатель уравнения превращается в нуль, т. е. в конечный момент времени уравнение (3) имеет особенность. Один из способов устранения особенности, предложенный в [1], заключается в том, что (3)
приводится к виду u = k0 + k1t + kvV,
где k = Vk — Vo + V^. k = Vk — Vo ; 0 T A T ; 1 TA T ;
kv =- —, v A T
A T - малая величина времени. V - текущая скорость объекта движения; t – текущее время (G < t < T ).
Абсолютная величина A T, трактуемая как «жесткость управления» [2], обычно составляет 0,03 T – 0,05 T (с). Текущая скорость ( V ) определяется из уравнения
V = ( V o* - V o )e - t/ A T + V , + V k TV^t . (5)
Здесь V 0* – действительное фазовое состояние объекта при t = 0, отличающееся от программного начального состояния V 0 , которое принято при расчете программы движения.
Уравнения (4)–(5) не предоставляют полной картины о движении объекта, так как отсутствуют аналитические зависимости, описывающие эволюцию траектории объекта. Поэтому в своих исследованиях мы использовали метод численного интегрирования, реализация которого приведена в работах [8, 12]. Дважды интегрируя u из (4), получаем на каждом шаге интегрирования скорость ( V ) и координату ( S ) объекта движения.
Компьютерная реализация алгоритма программного и финитного закона управлений. Авторская разработка компьютерного обеспечения темы статьи реализована в языковой среде Visual Basic 2010 [11] на базе интегрированной среды разработки Visual Studio Express 2013 под управлением Windows. В ка-
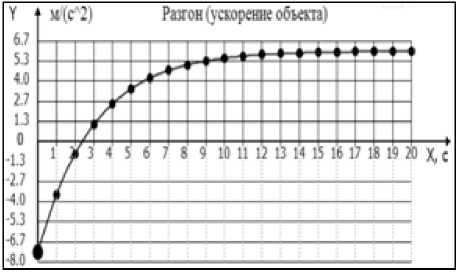
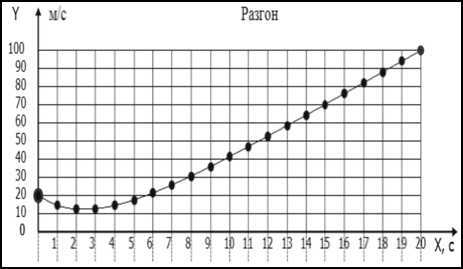
Ускорение [ и ] Скорость [ V]
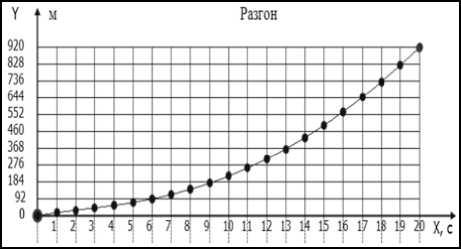
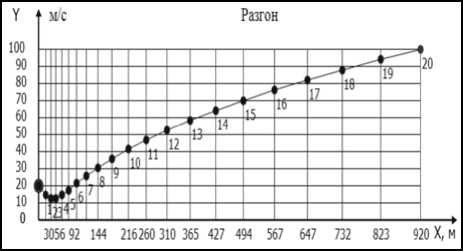
Координаты [ S ] Фазовые координаты [ V , S ]
Синтез финитного закона управления на основе заданного постоянного программного ускорения Synthesis of finite law of control based on a given continuous program acceleration честве иллюстративного примера приводится решение задачи разгона материальной точки из [2, с. 23].
Пример (см. рисунок). Объект разгоняется в течение T = 20 c от начальной скорости V 0 * = 20 м/с до конечной скорости V k = 100 м/с. При расчете коэффициентов к о и к 1 начальная скорость объекта была задана равной V 0 = - 20 м/с, а «жесткость управления» принималась равной A T = 3 с.
Закон управления, соответствующий заданным условиям задачи, принимает вид: и = - 0,667 + 2 t - 0,333 V . Следовательно, обратная связь о кинематике движения в алгоритме управления ( и ) осуществляется на основе данных смешанного программного управления, являясь функцией временного ( t ) и координатного программных управлений по скорости ( V ). Координаты объекта (S) вычислялись численным интегрированием системы уравнений
V = и ,
, S' = V .
В компьютерную программу блока интегрирования был включен метод Рунге-Кутты четвертого порядка точности. Шаг интегрирования составлял 1 с.
Заключение . По результатам выполненного исследования можно сделать следующие выводы:
-
1. Количественное представление о параметрах позиционирования звеньев биомеханической системы на границе фаз упражнения задается численной величиной запланированных значений обобщенных координат модели в узловых точках траектории.
-
2. Аналитическое представление эволюции управляющих воздействий должно удовлетворять принципу совместности запланированных значений программного и финитного управлений в узловых точках траектории биомеханической системы, кинематическое состояние которых и является целью управления.
-
3. Фазу разгона в технике спортивных упражнений можно прогнозировать аналитической моделью управления конечным состоянием биомеханических систем на основе синтеза программного и финитного законов движений.
Список литературы Синтез программного и финитного законов движений в аналитических моделях управления конечным состоянием биомеханических систем
- Анохин, Н.В. Приведение многозвенного маятника в положение равновесия с помощью одного управляющего момента / Н.В. Анохин // Известия РАН. Теория и системы управления. - 2013. - № 5. - С. 44-53.
- Батенко, А.П. Управление конечным состоянием движущихся объектов / А.П. Батенко. - М.: Сов. радио, 1977. - 256 с.
- Борисов, О.И. Методы управления робототехническими приложениями: учеб. пособие / О.И. Борисов, В.С. Громов, А.А. Пыркин. - СПб.: Университет ИТМО, 2016. - 108 с.
- Гавердовский, Ю.К. Обучение спортивным упражнениям. Биомеханика. Методология. Дидактика / Ю.К. Гавердовский. - М.: Физкультура и Спорт, 2007. - 912 с.
- ГОСТ Р ИСО 8373-2014. Роботы и робототехнические устройства. Термины и определения. - М.: Стандартинформ, 2015. - 20 с. http://standartgost.ru/g/ГОСТ_Р_ ИСО_8373-2014#page-1 (дата обращения: 15.04.2016).
- Грибков, В.А. Экспериментальное исследование устойчивости обращенных стабилизируемых маятников / А.Н. Грибков, А.О. Хохлов // Вестник МГТУ им. Н.Э. Баумана. Сер. Естественные науки, 2017. - № 2. - С. 22-39.
- Дыда, А.А. Решение обратной задачи кинематики для манипуляционного робота методом штрафных функций / А.А. Дыда, Д.А. Оськин // Фундамент. исследования. - 2015. - № 11-4. - С. 673-677.
- Дьяконов, В.П. Справочник по алгоритмам и программам на языке Бейсик для персональных ЭВМ: справ. / В.П. Дьяконов. - М.: Наука. Гл. ред. физ.-мат. лит., 1987. - 240 с.
- Загревский, В.И. Формализм Лагранжа и Гамильтона в моделировании движений биомеханических систем: моногр. / В.И. Загревский, О.И. Загревский, Д.А. Лавшук. - Могилев: МГУ им. А.А. Кулешова, 2018. - 296 с.
- Загревский, О.И. Техника большого оборота назад из стойки на руках в стойку на руках на параллельных брусьях на этапе двигательного умения и навыка / О.И. Загревский, В.И. Загревский // Теория и практика физ. культуры. - 2015, № 7. - С. 23-25.
- Зиборов, В.В. Visual Basic на примерах / В.В. Зиборов. - СПб.: БХВ-Петербург, 2013. - 448 с.
- Мудров, А.Е. Численные методы для ПЭВМ на языках Бейсик, Фортран и Паскаль / А.Е. Мудров. - Томск: МП «Раско», 1991. - 272 с.
- Подчукаев, В.А. Теория автоматического управления (аналитические методы) / В.А. Подчукаев. - М.: ФИЗМАТЛИТ, 2004. - 392 с.
- Поляхов, Н.Д. Управление перевернутым двухзвенным маятником / Н.Д. Поляхов, Р.И. Галиулин // Известия СПБГЭТУ «ЛЭТИ». 2015. - № 6. - С. 65-69.
- Применение мехатронных комплексов в обучении автоматизации и робототехники / А.А. Бобцов, А.С. Боргул, К.А. Зименко, А.А. Маргун // Дистанционное и виртуальное обучение. - 2013. - № 5. - С. 22-30.
- Савоськин, А.Н. Динамика тягового подвижного состава. Часть II. Конспект лекций по дисциплинам «Динамика систем», «Основы механики подвижного состава», «Механическая часть э.п.с.» / А.Н. Савоськин, Г.П. Бурчак, А.П. Васильев; под ред. Савоськина А.Н. - М.: РУТ (МИИТ), 2017 - 157 с.
- Старков, В.Н. Исследование динамики маятниковых систем с переменными параметрами / В.Н. Старков, Н.А. Степаненко // Естественные и математические науки в современном мире: сб. статей по материалам XV междунар. науч.-практ. конф. - Новосибирск: Изд. «СибАК». - 2014. - № 2 (14). - С. 20-36.
- Теория управления. Терминология. Вып. 107. - М: Наука, 1988. - С. 56.
- Haghighi H.S., Davaie-Markazi A.H.D. Chaos prediction and control in MEMS resonators // Communications in Nonlinear Science and Numerical Simulation. - 2010. - Vol. 15. - No. 10. - Р. 3091-3099.
- Qiao F., Zhu Q., Winfield A., Melhuish C. Adaptive Sliding Mode Control for MIMO Nonlinear Systems Based on Fuzzy Logic Scheme // International Journal of Automation and Computing. - 2004. - July. - Vol. 1. - Р. 51-62.
- Shan, J. Dynanic analysis of two link robot manipulator for control design using computed torque control / J. Shan, S.S. Rattan, B.C. Nakra // International Journal of Research in Computer Applications and Robotics. - 2015. - Vol. 3. - P. 52-59.
- Zimenko, K. EMG real-time classification for robotics and HMI / K. Zimenko, A. Margun, A. Kremlev // 18th IEEE International Conference on Methods and Models in Automation and Robotics, MMAR 2013. - Miedzyzdroje, Poland. - 2013. - Art. no. 6669930. - P. 340-343.
