Синтез законов управления движением объектов по предписанным траекториям

Автор: Батырканов Ж.И., Кадыркулова К.К., Маматов Д.Н.
Журнал: Огарёв-online @ogarev-online
Статья в выпуске: 14 т.9, 2021 года.
Бесплатный доступ
Приведены новые алгоритмы синтеза законов управления движением управляемого объекта по заданной предписанной траектории. Рассматриваются два варианта синтеза - с использованием аналитического описания траектории движения и табличного, проиллюстрированные на модельных примерах. Результаты моделирования показали конструктивность и высокую эффективность процедур синтеза.
Вектор невязки, вектор состояние, закон управления, конечно-разностное уравнение, объект управления, предписанная программа (траектория)
Короткий адрес: https://sciup.org/147250018
IDR: 147250018 | УДК: 681.171.074:004.356.2
Synthesis of laws of movement control of objects along prescribed trajectories
New algorithms for the synthesis of control laws for the implementation of the motion of a controlled object along a given prescribed trajectory are presented. Two variants of synthesis are considered, using an analytical description of the trajectory of motion and tabular description, illustrated with model examples. The simulation results showed the constructiveness and high efficiency of the synthesis procedure.
Текст научной статьи Синтез законов управления движением объектов по предписанным траекториям
В различных практических областях ставятся задачи по обеспечению движения объекта по предписанным траекториям. Это задачи управления движением рабочего органа манипулятора, лазерным лучом, промышленными роботами, рабочим органом 3D-принтера, квадрокоптерами и. т. д. Проблемы синтеза законов управления предписанным движением, на данное время до конца не решены, это связано с трудностями при рассмотрении многомерных, нелинейных систем, а также с трудностями аналитического описания предписанных траекторий движения. В большинстве случаев на практике, например, при построении систем управления с промышленными роботами или применения 3D-принтеров, предписанную траекторию движения описать аналитически очень сложно. В этом случае используется подход синтеза на основе табличного задания предписанной траектории движения.
Синтез законов управления в случаях задания предписанной траектории движения в аналитической форме. Рассмотрим объект, описываемый математической моделью в виде x = F(x) + G(x)u, (1)
где x = (x 1 , x2,..., xn ) T — вектор состояния;
u = (u 1 , u2, ., um ) T — вектор управления;
F(x) — в общем случая нелинейная вектор-функция;
G (x) — матрица, элементы которой-нелинейные функции от “ x ”.
Данная структура модели включает в себя и случай линейного объекта:
x = Ax + Bu, где А, В – числовые матрицы.
Предписанная траектория движения задаётся в виде системы аналитических выражений:
^r(x, t) = 0, r = l,s .(2)
Назначая далее требуемый закон отработки ошибки выполнения программы движения в виде
^^^ = Rr(8,x, t), Rr(0, x, t) = 0, 8r = ^r(x,t) Ф 0,(3)
синтезируется искомый закон управления из условия обеспечения 8r ^ 0 в виде
U^i^x)^.(4)
где коэффициенты C i , r = 1, s определяется из следующей системы:
^1Ci(GT(z)^, GT(x)^)= Rt — ^^^ l=XS;(5)
Л МЛ МЛмс а искомый вектор управления существует при условии rank (g(x) • ^1=1 Ci^) = rank G(x).(6)
Если данное условие не выполняется, то это говорит о невозможности осуществления движения управляемой системы по заданной (предписанной) траектории.
Пример синтеза алгоритмов осуществления предписанной траектории . В качестве примера рассмотрим управляемый объект, который описывается системой уравнений
( x 1 = —x2 + u 1 ;
* 2 = * з ;
x 3 = u 2 ;
или x = Ax + Ви,
где
/ 0 -1
A = ( 0 0
) ; B = (1 0)
Поставим задачу осуществления движения системы по траектории, описываемой системой уравнений
( ^p1(x1, x2, x3, t) = x1 + x2 +x3 - 1 = 0;
\^2(*l,*2,*3,t) = x1 — 2x2 — 3x3 — 5 = 0.
Для решения задачи синтеза предварительно выясним вопрос линейной независимости векторов Вт • ^\ Для этого определим
„т . W1 _ Г1 0 01, [11 _ Г11. от . _ [1 0 0] . [ М _ Г 1 1
В —=[0 0 1] |J|"I1I' В 17= [0 0 11 [:2]"1-з1
Согласно [1] закону управления (4), имеем выражения искомых законов f U1 = ^ (12^1 + 4г2 + 16*2 - 4хз);
I U2 = ^ (4Г1 - 47-2 - 12%з).
Моделирование замкнутой системы управления с помощью ППП MATLAB.
Уравнение замкнутой системы исходя из (7) и (10) определяется в виде
( х1 = \ Х 2
(x3 =
-
- • x
= x3;
-
2;
— x3.
16 3
Моделирование осуществляется на основе системы (11). На рисунке 1 показана модель, выполненная в пакете Simulink. Результаты моделирования показаны на рисунке. 2.
Таким образом, синтезированный закон обеспечивает движение системы по предписанной траектории, заданной в виде системы уравнений (9). Физическая реализация полученных синтезированных функций U 1 , U2 не вызывает никаких затруднений.
Модельный пример синтеза адаптивного закона управления программным движением. Пусть объект управления описывается системой
Х = ах + ви + Дах,
, „ f 0 1\ /0\ . /а11 а12\ О
где, а=( q) ; в = (J; Да = (а а ) — параметрические возмущения.
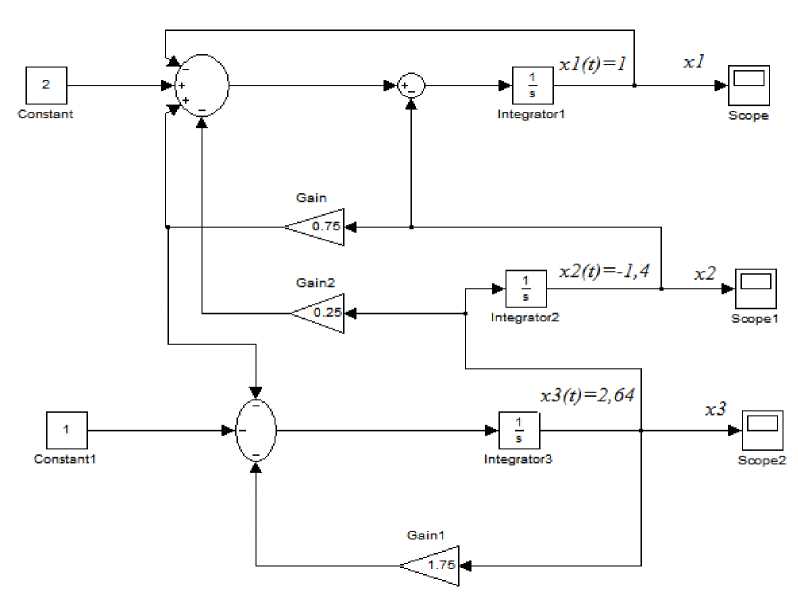
Рис. 1. Моделирование замкнутой системы управления в Simulink.
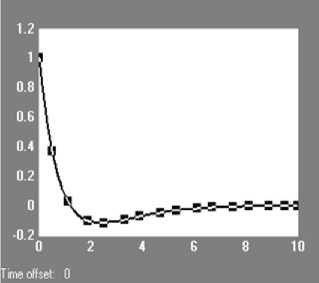
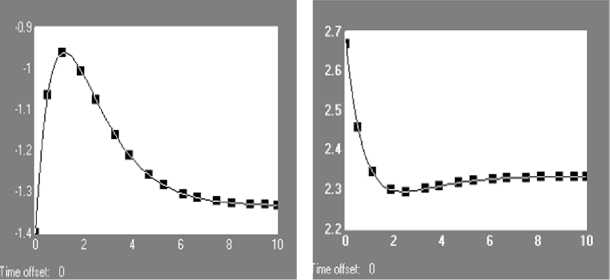
Рис. 2. Результаты моделирования для x 1 (t), x2(t) x3(t).
Предписанная программа движения описывается гармоническим законом
X(t) =А sin tot или
2 ^(X 1 ,X 2 ) = X 2 + — - А 2 =0.
Unp строится в виде:
Unp = (а(х) • ^(х, t) - 2x1X2)^-.
Окончательно уравнение замкнутой системы управления с учётом регулятора вида
U= Unp-Cx, структуры
где С - матрица параметрических возмущений, представится в виде:
(
* 2
к
* 1 = * 2 + а11 * 1 + а12 * 2 ;
|
а 21 * 1 + а22 * 2 - " 2 [* 1 + а0 (* 1 + |
4- л2 «2 |
) * 2] C1 * 1 C2 * 2 ; |
|
|
А _ 2X1X2 C1 = 2 1 «2 |
( * 2+ i |
- Л2); |
|
|
с - 2х ! С2 = « 2 |
(* 2 + 5‘ |
- Л2). |
|
Проинтегрировав приведенные выражения, можно исследовать процессы
* 1 (t), *2(t), C 1 (t), C2(t) и наблюдать фазовые портреты с помощью пакета MATLAB.
Моделирование синтезированной адаптивной системы управления на MATLAB Simulink. Зависимости * 1 (t), *2(t), C 1 (t), C2(t) можно исследовать, интегрируя выражения (17) с помощью пакета Simulink (рисунок 3). Полученные результаты моделирования показаны на рисунках 4 – 7, соотношение между изменением выхода параметры и скоростью изменения *2(t) иллюстрируется фазовым портретом, представленном на рисунке 8.
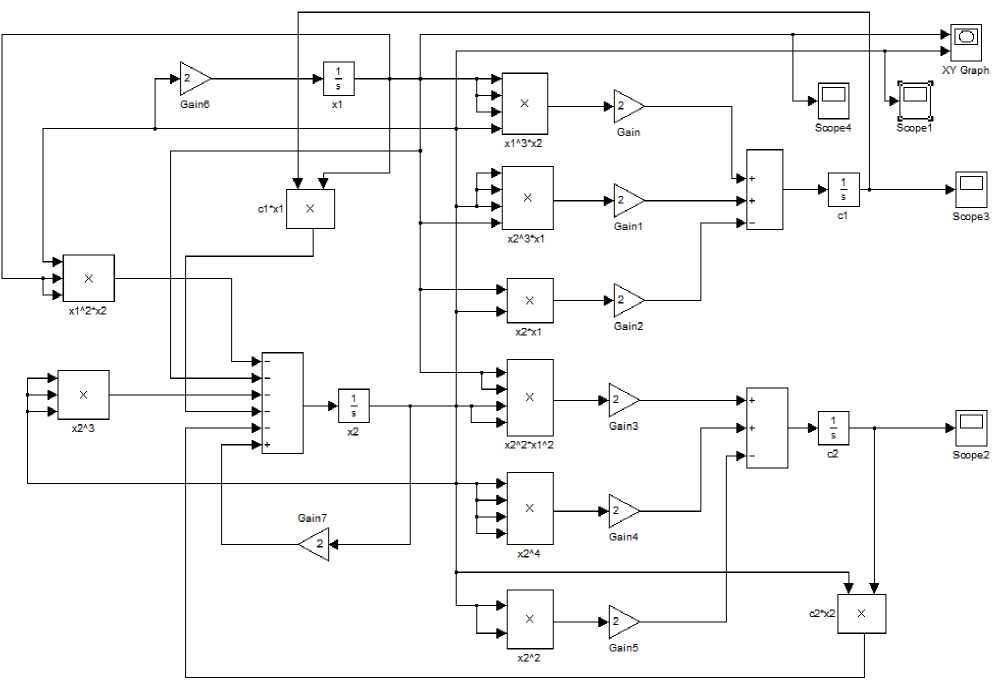
Рис. 3. Структурная схема моделирования синтезированной системы в пакете MATLAB Simulink.
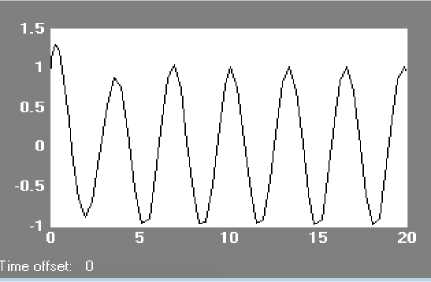
Рис. 4. Процесс на выходе x 1 (t).
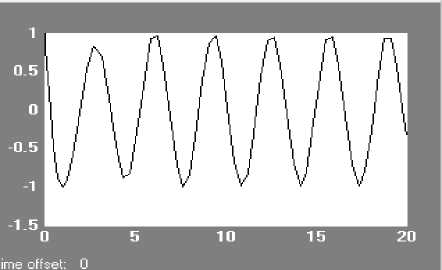
Рис. 5. Процесс на выходе x2(t).
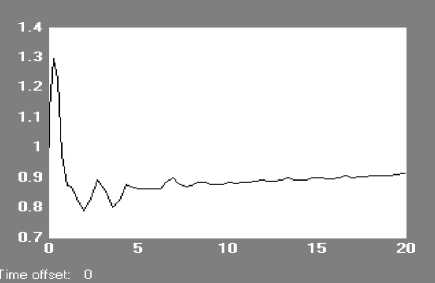
Рис. 6. Процесс на выходе C 1 (t).
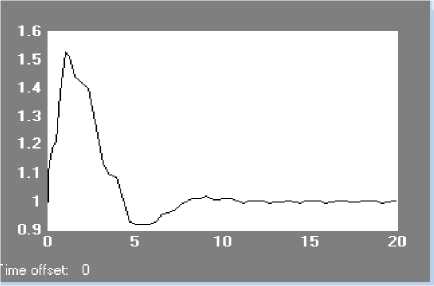
Рис. 7. Процесс на выходе C 2 (t).
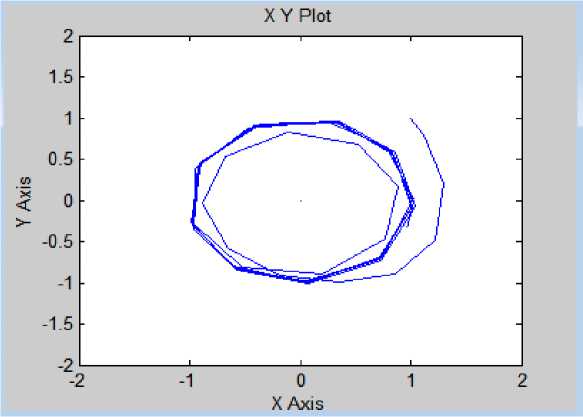
Рис. 8. Фазовый портрет выходных сигналов x 1 (t) и x2(t).
Данный фазовый портрет полностью подтверждает теоретические выводы и показывает процедуру синтеза (определения) искомых законов управления, когда предписанная траектория задается в аналитической форме.
Подход к синтезу законов управления в случаях задания предписанной траектории движения в табличной форме. Во многих практических важных случаях, например, в задачах робототехники, при автоматизации раскроя и конструирования одежды, использования лазерных технологий микроэлектроники, в системах 3D-технологий и др. аналитическое представление предписанной программы движения вызывает большие затруднения. В этих случаях предлагается следующий подход к синтезу. Пусть объект описывается системой x = f(x,u, t), (16)
где x = (x 1 ,x2,... ,xn)T — вектор состояния;
u = (u 1 , u2,..., um ) T — вектор управления.
Требуется синтезировать закон управления по осуществлению траектории движения управляемой системы, заданной в табличной форме (см. таблицу 1).
Таблица 1
Предписанная траектория движения, заданная в табличной форме
|
tk |
t0 |
t1 |
t2 |
t3 |
... |
|
X 1 |
x10 |
x ii |
x12 |
x13 |
... |
|
x2 |
x20 |
x21 |
x22 |
x23 |
... |
|
... |
... |
... |
... |
... |
... |
|
xn |
xn0 |
x n1 |
xn2 |
xn2 |
... |
Для удобства принимается tk = k, k = 0, 1, 2..., т. е. вводятся абстрактные дискретные моменты времени.
Математическая модель объекта записывается в дискретной форме
x(k + 1) — x(k) x(k + 1) — x(k)
= f(x(k), u(k), k) или -------------- = f(x(k), u(k), k).
t k+1 t k A
Ее представляем в виде
x(k + 1) = x(k) + f(x(k),u(k),k)A, (17)
где: x(k) - текущее состояние, x(k +1) - состояние на следующем шаге.
Из выражения (17) можно определить u(k): u(k) = U(x(k),x(k + 1), k, △ ).
Управление будет определяться из условия минимизации квадрата невязки:
^ хтабл(к + 1) xтекущ < k+ 1)11 2 ^ min.
Для линейного объекта x = Ax + Bu вышеописанного процедура синтеза приводит к результату
u(k) = -47(ВтВ)-1[2Вт8хтабл(к+1) - 2BT(A5 + E)Sx(k)] =
Список литературы Синтез законов управления движением объектов по предписанным траекториям
- Батырканов Ж. И., Шаршеналиев Ж. Ш. Синтез систем управления с заданными показателями качества. - Бишкек: Илим, 1991. - 174 с.
- Батырканов Ж. И., Кадыркулова К. К. Синтез законов управления по осуществлению движения управляемого объекта по предписанной программе // Вестник науки Костанайского социально-техн. унив. им. академика Зулхарной Алдамжар. Костанай. - 2013. - № 3. - С. 29-33.
- Батырканов Ж. И., Кадыркулова К. К. Синтез законов управления для осуществления движения объекта по предписанной программе // Прикаспийский журнал: управление и высокие технологии. - 2015. - № 1 (29). - С. 143-155. EDN: TWHCEZ
- Батырканов Ж. И., Кадыркулова К. К., Мамбетдинов И. М. Разработка системы управления шаговыми приводами трехзвенного манипулятора [Электронный ресурс] // Огарев-online. - 2018. - №13. - Режим доступа: http://journal.mrsu.ru/arts/razrabotka-sistemy-upravleniya-shagovymi-privodami-trexzvennogo-manipulyatora (дата обращения: 20.10.2021). EDN: YOUMOD
- Крутько П. Д. Обратные задачи динамики управляемых систем: Линейные модели. - М.: Наука, 1987. - 304 с.
