Система автоматической ориентации научной аппаратуры в эксперименте "Ураган" на Международной космической станции

Автор: Беляев Борис Илларионович, Беляев Михаил Юрьевич, Боровихин Павел Александрович, Голубев Юрий Викторович, Ломако Алексей Андреевич, Рязанцев Владимир Васильевич, Сармин Эрик Эдуардович, Сосенко Виктор Андреевич
Журнал: Космическая техника и технологии @ktt-energia
Рубрика: Наземные комплексы, стартовое оборудование, эксплуатация летательных аппаратов
Статья в выпуске: 4 (23), 2018 года.
Бесплатный доступ
При изучении наземных и астрономических объектов с помощью орбитальных станций «Салют» и «Мир» выполнялось построение требуемой ориентации станции на наблюдаемые объекты. Для МКС, имеющей очень большие размеры и массу, гиродины, установленные на Американском сегменте, не обладают располагаемым кинетическим моментом, достаточным для наведения станции на исследуемые объекты. Понятно, что при такой ориентации МКС выполнять наведение жестко закрепленных приборов на исследуемые объекты невозможно. Поэтому при проведении научных экспериментов на МКС необходимо использовать подвижные платформы наведения (ПН). Использование нескольких ПН позволяет также осуществлять одновременное наблюдение разных объектов. С начала полета МКС в рамках эксперимента по исследованию Земли «Ураган» используются ручные приборы наблюдения, и экипаж наводит на исследуемые объекты фотографическую, фото- и видеоспектральную аппаратуру через иллюминаторы. Однако на планирование таких экспериментов налагаются сильные ограничения, прежде всего связанные с необходимостью учета распорядка дня экипажа и наличия у него времени, выделенного на проведение научных экспериментов...
Наведение на объекты наблюдения, международная космическая станция, подвижные платформы наведения, космические эксперименты
Короткий адрес: https://sciup.org/143168441
IDR: 143168441 | УДК: 528.716
Automatic positioning system for science hardware in Uragan experiment on the ISS
When studying ground and astronomical objects using the Salyut and Mir orbital stations a required station attitude was established to the objects under observation. For the ISS having large dimensions and mass the gyrodynes installed on the US On-orbit Segment have no available kinematic momentum sufficient to point the station to the objects under observation. It is evident that in such ISS attitude it is impossible to position rigidly fixed instruments to objects under observation. Therefore, when conducting scientific experiments on the ISS mobile pointing platforms (PP) shall be used. Using several PP also allows for simultaneous observation of different objects. Since the beginning of the ISS flight hand-held observation devices have been used in the Earth exploration experiment «Uragan», and the crew points the photographic, photo- and video-spectrometers to the objects under observation through the windows. However, strong constraints are placed on the planning of such experiments, primarily related to a need for accounting for the crew schedule and availability of the time allocated for scientific experiments...
Текст научной статьи Система автоматической ориентации научной аппаратуры в эксперименте "Ураган" на Международной космической станции
В настоящее время завершается развертывание на орбите Земли Международной космической станции (МКС). В этой связи главная задача для участников проекта МКС связана с повышением эффективности целевого использования этой станции, т. е. успешным выполнением научных и прикладных исследований и экспериментов. Результативность выполнения научных и прикладных программ экспериментов на пилотируемой станции обычно определялась многоцелевым характером проводимых работ и наличием экипажа [1, 2]. Выполнение исследований в различных направлениях позволяет многоцелевой станции непрерывно «работать на конечный результат», в то время как специализированные космические аппараты работают лишь в короткие «окна», определяемые, например, видимостью с КА наблюдаемого объекта. На МКС возможности выполнения многоцелевых программ используются недостаточно. Это связано, главным образом, с тем, что особенности ориентации МКС затрудняют проведение ряда направлений исследований.
Отсутствие необходимой для наблюдения исследуемых объектов ориентации МКС связано со спецификой функционирования гиродинов, установленных на Американском сегменте (АС). Система управления ориентацией на гиродинах работоспособна,– пока кинетический момент гиродинов H находится внутри допустимой области (области в–ариации кинетического момента). Если | H | приближается к границе допустимой области, то необходима разгрузка гиродинов. Поскольку гиродины МКС, установленные на АС, не обладают располагаемым кинетическим моментом, достаточным для наведения станции на исследуемые объекты, или даже для поддержания углового положения станции относительно орбитальной или инерциальной систем координат, на МКС реализован следующий принцип ориентации. В отличие от орбитального комплекса «Мир» или станций «Салют», МКС ориентируется относительно орбитальной или инерциальной систем координат не строительными осями, по которым обычно установлены научные приборы наблюдения, а главными центральными осями инерции. Главные оси МКС в процессе развертывания станции были отклонены от строительных осей на несколько градусов, причем это отличие было переменно и зависело от текущей конфигурации МКС. Кроме того, для компенсации возмущающего момента, действующего на станцию, МКС осуществляет небольшие повороты для гравитационной разгрузки гиродинов (появляющийся при развороте станции гравитационный момент «разгружает» накопленный за счет действующего возмущающего момента кинетический момент гиродинов). Понятно, что при такой ориентации МКС невозможно выполнять прецизионное наведение на исследуемые объекты и сканирование небесной сферы или земной поверхности.
В результате теряется основное преимущество орбитальных станций как многоцелевых исследовательских лабораторий. Это обстоятельство особенно критично для нашей страны, так как традиционно в отечественных программах орбитальных станций важное место занимали астрономические исследования и эксперименты по изучению Земли (подобные эксперименты содержатся и в программе научноприкладных исследований Российского сегмента (РС) МКС).
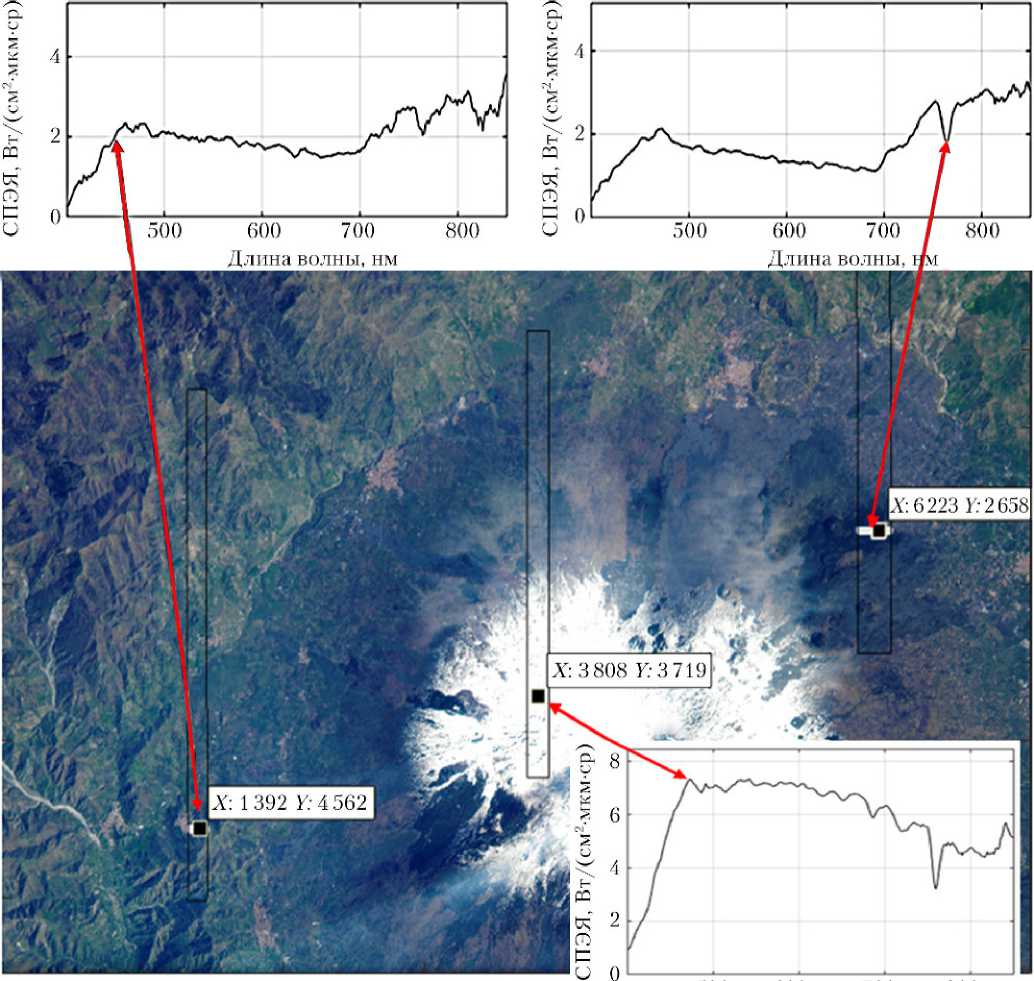
С учетом указанных трудностей ориентации станции для выполнения съемки земной поверхности с МКС в эксперименте «Ураган» применялись ручные камеры и спектрометры [3–5]. Их использование позволило получить большое количество информации о различных процессах и явлениях на земной поверхности [6–11]. Пример регистрации изображений и спектров в непосредственной близости от извергающегося вулкана с помощью видеоспектральной системы показан на рис. 1. На всех трех графиках спектральной плотности энергетической яркости уверенно различаются полосы поглощения атмосферных газов: полоса поглощения кислорода (762 нм), слабые полосы поглощения водяного пара (650, 690, 720, 820 нм), а также видно качественное отличие в спектрах излучения, отраженного от различных типов подстилающей поверхности. Аномальные полосы поглощения, свидетельствующие о наличии больших концентраций газов, характерных для извергающегося или дегазирующего вулкана, отсутствуют.
500 000 /00 800
Длина волны, нм
Рис. 1. Съемка научной аппаратурой видеоспектральной системы на фоне извержения вулкана Этна 3 марта 2017 г.
Примечание. X, Y — координаты пикселей спектрометрируемой области на изображении. СПЭЯ — спектральная плотность энергетической яркости.
С помощью спектрометрических измерений решается задача анализа состояния объекта по отражательным характеристикам, выраженным в виде спектральных сигнатур. Продуктом анализа могут быть карты (литологические, геоботанические, таксационные и другие), отчеты о состоянии (качество почв, определение органических соединений, содержащихся в воде) и прогнозы состояния (урожайность, производительность рыболовных хозяйств), обнаружение техногенных выбросов промышленных предприятий, распространение «пылевых – соляных» бурь, выделение дымовых шлейфов, локализация источников задымления и оценки границ размывания шлейфов.
Несомненным преимуществом ручных спектрометрических приборов, использующихся на борту РС МКС, является возможность отслеживания объекта исследования. За счет этого появляется возможность изучать изменение спектральных характеристик подстилающей поверхности в зависимости от угла визирования.
Измерение индикатрис отражения (рассеяния) объектов для каждого спектрального канала реализуется в режиме измерений путем непрерывной (покадровой) съемки с удержанием оператором объекта (фиксированной точки на подстилающей поверхности) в центре поля зрения системы. При этом происходит регистрация изображений и спектров объекта для различных углов рассеяния солнечного излучения за счет движения МКС по орбите. Эти измерения представляют наибольший интерес для решения таких задач как съемка (диагностика) разливов нефти в море, пожаров, извержений вулканов, волновых движений (возмущений) в океане. В последнем случае индикатрисные измерения позволяют определять спектр наклонов водной поверхности и тонкую структуру волновых движений в океане. Индикатрисные измерения нефтяных пленок дают возможность более надежной их идентификации, а в случае регистрации дымов и аэрозольных выбросов позволяют оценивать концентрации и размеры частиц [3–10].
Вместе с тем следует отметить, что на МКС существуют проблемы привлечения космонавтов для выполнения целевых исследовательских программ, например, в период сна экипажа, когда требуется осуществить съемку определенных районов на земной поверхности.
Для устранения проблемы наведения научной аппаратуры (НА) на исследуемые объекты в настоящее время осуществляется доработка Российского сегмента МКС для осуществления возможности выполнения на нем целевых программ: на станции установлены и разрабатываются дополнительные специальные подвижные платформы наведения (ПН). Использование ПН позволяет значительно расширить возможности МКС по исследованию Земли и небесной сферы. Для выполнения наблюдений заданных объектов в этом случае могут использоваться методы оптимального планирования программы научных экспериментов [1, 2, 12]. В данной статье описаны подвижные платформы, разрабатываемые для установки на иллюминаторы внутри станции.
Бортовая система автоматической ориентации видеоспектральной аппаратуры
Система ориентации видеоспектраль-ной аппаратуры «СОВА» предназначена для обеспечения установки на иллюминаторах служебного модуля (СМ) РС МКС и многоцелевого лабораторного модуля (МЛМ) МКС различной НА для видео-, фото- и спектральной съемки, наведения НА и съемки по заданной программе оператором или без участия оператора.
Система «СОВА» разработана и создана с целью автоматизации процесса измерений на МКС оптических характеристик подстилающих поверхностей при выполнении мониторинга земной поверхности в ходе проведения научноприкладных исследований в космическом эксперименте «Ураган».
Система «СОВА» представляет собой ПН, устанавливаемую на иллюминатор, на которой фиксируется съемочная аппаратура, и управляющий ноутбук, расположенный рядом — в 1,5–3 м от иллюминатора. Система «СОВА» обеспечивает возможность наведения полей зрения НА и отслеживания объекта по изображению на экране монитора ноутбука.
Для установки на РС МКС предусмотрено несколько модификаций аппаратуры «СОВА».
Платформа наведения «СОВА» 228 устанавливается на иллюминатор 0228 мм СМ РС МКС и обеспечивает возможность поворота установленной на ней съемочной аппаратуры на ±180° вокруг оси визирования и наведения с углом отклонения не менее 20° в одной плоскости от оптической оси иллюминатора.
Платформа наведения «СОВА» 426 устанавливается на иллюминатор 0426 мм как СМ РС МКС, так и МЛМ РС МКС и обеспечивает возможность наведения съемочной аппаратуры по двум взаимно перпендикулярным осям с углами отклонения не менее ±30°.
В ходе проектирования были рассмотрены два варианта конструктивного построения ПН «СОВА».
Вариант ПН «СОВА-1» (рис. 2) выполнен по несколько необычной схеме — съемочная НА закрепляется на ПН неподвижно, а сканирование поверхности Земли осуществляется при помощи зеркала, установленного на подвесе, поворачивающемся при помощи электроприводов.
Платформа наведения «СОВА-1» представляет собой связанный с опорой 9 (для закрепления на иллюминаторе) светонепроницаемый со стороны отсека МКС жесткий кожух с посадочным кольцом 2 для установки НА. Внутри кожуха находятся два зеркала: подвижное 3, закрепленное на карданном подвесе с возможностью поворота в двух плоскостях при помощи электроприводов (шаговые двигатели 5 с микрометрическими винтами 6), и неподвижное 1 («зеркало 45°»), направляющее световой поток на приемную аппаратуру. Подвижное зеркало имеет возможность поворота по каждой из осей ±15°, что приводит к сканированию поверхности Земли по углам ±30°.
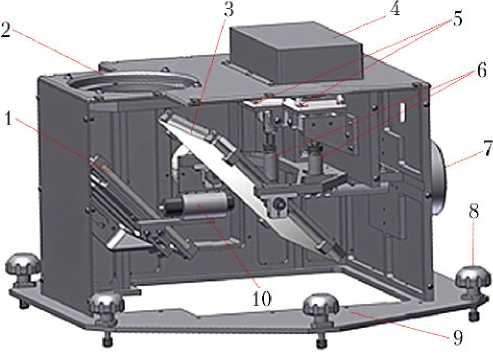
Рис. 2. Вариант конструктивного построения платформы наведения «СОВА-1»: 1 — зеркало неподвижное;
2 — посадочное кольцо для съемочной аппаратуры; 3 — зеркало подвижное; 4 — крышка электродвигателей; 5 — электродвигатели; 6 — винты микрометрические; 7 — энкодер;
8 — винт крепления платформы наведения к иллюминатору;
9 — опора; 10 — съемочная камера
а)
Выбор принципа сканирования при помощи поворотного зеркала обусловлен следующими факторами:
-
• значительная масса и габариты некоторой НА приводят к возникновению значительных моментов инерции относительно осей поворота;
-
• высокие коэффициенты отражения современных оптических зеркал (90…98%), причем как для напыленных на стекле, так и для полированных металлических (например, из алюминиевых сплавов).
Платформа наведения «СОВА-1» дополнена системой визирования наблюдаемой цели. Для этого в аппаратуре на кронштейне установлена веб-камера 10 соосно оси визирования. Изображение с этой веб-камеры выводится на экран управляющего ноутбука в реальном времени. На экране также предусмотрен джойстик наведения. В таком варианте построения системы оператор может наводить и управлять НА, установленной за светозащитным экраном.
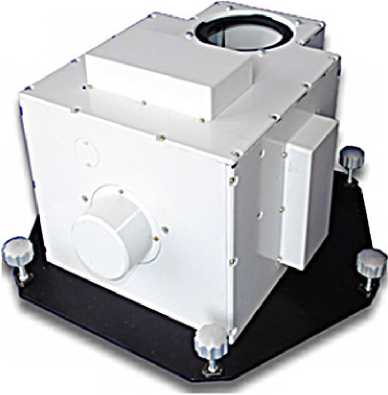
Платформа наведения «СОВА-1» представлена на рис. 3.

б)

в)
Рис. 3. Платформа наведения (ПН) «СОВА-1» и примеры установки научной аппаратуры: а — ПН «СОВА-1»; б — научная аппаратура видеоспектральной системы, установленная на ПН «СОВА-1»; в — фотоаппарат Nikon D3, установленный на ПН «СОВА-1»
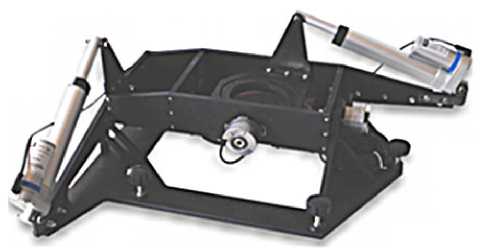
Вариант ПН «СОВА-2» (рис. 4) построен по «классической» схеме на основе ранее разработанных систем наведения с ручным управлением.
В качестве электроприводов, обеспечивающих поворот установленной аппаратуры, использованы линейные актуаторы.
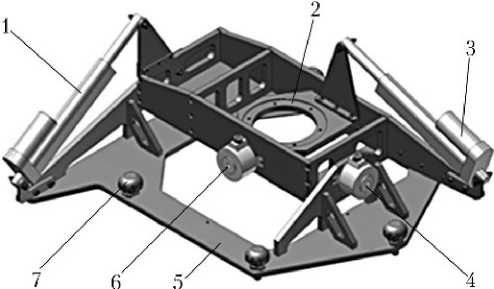
Рис. 4. Вариант конструктивного построения платформы наведения (ПН) «СОВА-2»: 1, 3 — актуатор; 2 — посадочное кольцо для съемочной аппаратуры; 4, 6 — энкодеры; 5 — опора; 7 — винт крепления ПН к иллюминатору
Конструкция ПН «СОВА-2» представляет собой опору 5 для крепления к иллюминатору, на которой установлены расположенные в плоскости, параллельной окну иллюминатора, и закрепленные в подшипниках качения узлы подвеса, обеспечивающие поворот кольца 2 для съемочной аппаратуры по двум взаимно перпендикулярным осям. Поворот кольца 2 осуществляется через рычаги при помощи шарнирно установленных линейных актуаторов 1 и 3 . Угол поворота считывается при помощи электромеханических энкодеров 4 и 6 , установленных на одних осях с соответствующими рычагами. Ход штока актуатора и плечо рычага рассчитаны таким образом, чтобы обеспечить углы прокачки ±30°.
На рис. 5 представлена ПН «СОВА-2».
Блок электроники предназначен для управления работой ПН «СОВА» с помощью специального программного обеспечения, которое отвечает за:
-
• включение/выключение аппаратуры, установленной на ПН, путем подачи команды по заданному временному алгоритму;
-
• отработку приводами углов наведения по командам оператора или по заранее установленной программе наведения.
Блок электроники включает в себя:
-
• контроллер управления системами наведения ПН;
-
• контроллер датчиков положения углов отклонения ПН;
а)

б)

в)
Рис. 5. Платформа наведения (ПН) «СОВА-2» и варианты установки научной аппаратуры: а — ПН «СОВА-2»; б — научная аппаратура видеоспектральной системы, установленная на ПН «СОВА-2»; в — фотоаппарат Nikon D3, установленный на ПН «СОВА-2»
-
• блок питания двигателей систем сканирования ПН;
-
• блок питания контроллеров.
Моделирование размещения ПН «СОВА» в МЛМ МКС и расположение иллюминаторов для монтажа ПН «СОВА» в СМ МКС показаны на рис. 6 и 7, соответственно.
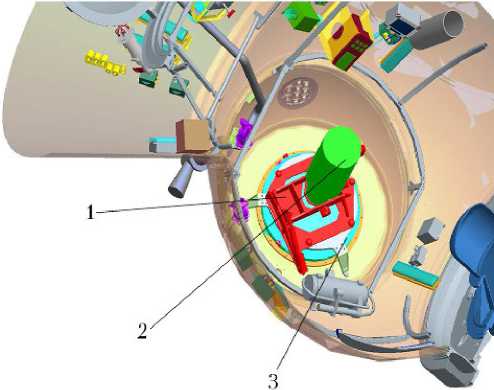
Рис. 6. Размещение платформы наведения «СОВА» в многоцелевом лабораторном модуле (МЛМ): 1 — платформа наведения; 2 — фотовидеоаппаратура; 3 — иллюминатор № 1 МЛМ
Специальное программное обеспечение осуществляет функционирование, контроль и управление системой «СОВА» в составе СМ РС МКС (рис. 8). Программа контроля и управления «СОВА»
выполняет расчет времени пролета над объектом (с учетом допустимых углов съемки) и параметров наведения на объект в реальном времени; учитывает нахождение станции над дневной/ночной стороной; обеспечивает одновременную работу с несколькими объектами, ручной ввод географических координат объекта, автоматическое включение и наведение НА, сохранение/загрузку объектов на жесткий диск.
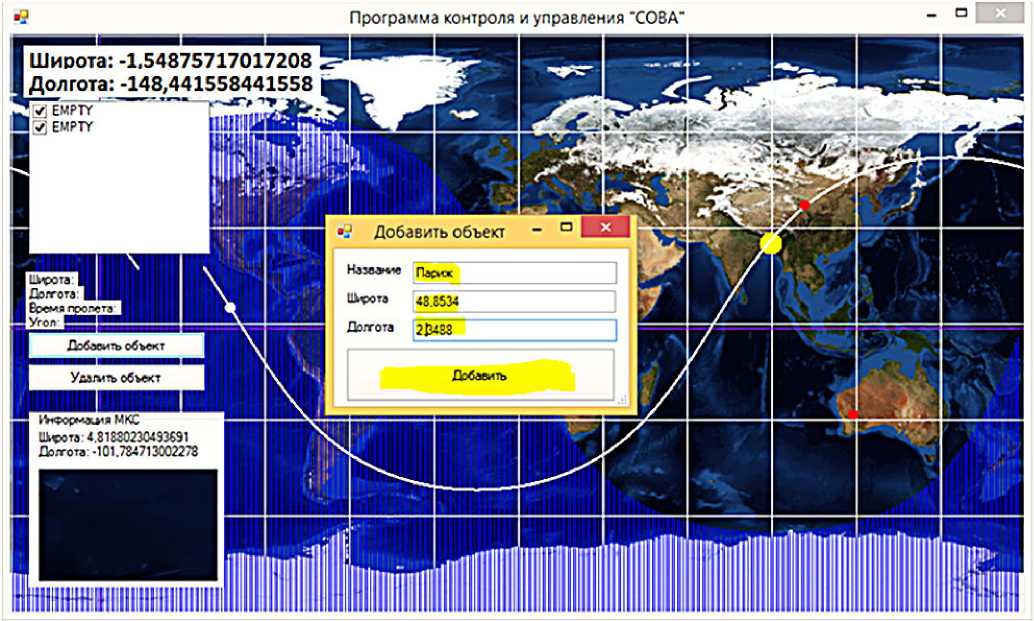
Рис. 8. Вид основного окна программы контроля и управления платформы наведения «СОВА»
Примечание. Разноцветными точками показаны проекции различных объектов на земную поверхность. Белая точка — текущее положение МКС (в левом верхнем углу ее координаты); желтая точка — Солнце (для учета положения терминатора); красная точка — объект съемки с его координатами в центре окна.

Рис. 7. Расположение иллюминаторов для монтажа платформы наведения «СОВА» в служебном модуле (СМ): 1 — иллюминатор № 9 СМ (426 мм); 2 — иллюминатор № 7 СМ (228 мм); 3 — иллюмингатор № 8 СМ (228 мм)
При запуске программы производятся загрузка ранее сохраненных объектов (при необходимости добавляются новые или удаляются ранее сохраненные объекты съемки) и расчет времени пролета над каждым из объектов списка. При пролете над объектом запускается автоматический расчет углов для наведения ПН «СОВА», и далее запускается съемка объекта.
Заключение
В рамках эксперимента «Ураган» на МКС проведено большое количество сеансов мониторинга различных объектов и явлений на земной поверхности с помощью фото-, видео- и спектрометрической аппаратуры.
Привлечение космонавтов к решению задач мониторинга земной поверхности показало ряд преимуществ по изучению потенциально опасных и катастрофических явлений.
Поскольку на МКС существуют проблемы привлечения космонавтов к выполнению съемок, например, в период сна экипажа или при проведении ими важных служебных операций, предложено использовать на МКС специальные подвижные платформы наведения. Эти платформы устанавливаются на иллюминаторы модулей РС МКС и позволяют непрерывно осуществлять мониторинг задаваемых объектов на земной поверхности с помощью исследовательской аппаратуры.
Список литературы Система автоматической ориентации научной аппаратуры в эксперименте "Ураган" на Международной космической станции
- Легостаев В.П., Беляев М.Ю. Проблемы и задачи повышения эффективности программ исследований на космических кораблях и орбитальных станциях//Ракетно-космическая техника. Труды. Сер. XII. Королёв: РКК «Энергия», 2011. Вып. 1-2. С. 1-294.
- Беляев М.Ю. Научные эксперименты на космических кораблях и орбитальных станциях. М.: Машиностроение, 1984. 263 с.
- Беляев Б.И., Беляев М.Ю., Десинов Л.В., Роговец А.В., Рязанцев В.В., Сармин Э.Э., Сосенко В.А. Летная отработка исследовательской аппаратуры «Фотоспектральная система» на борту Российского сегмента Международной космической станции//Космическая техника и технологии. 2014. № 1(4). С. 22-28.
- Беляев М.Ю., Десинов Л.В., Караваев Д.Ю., Сармин Э.Э., Юрина О.А. Аппаратура и программно-математическое обеспечение для изучения земной поверхности с борта Российского сегмента Международной космической станции по программе «Ураган»//Космонавтика и ракетостроение. 2015. № 1. С. 63-70.
- Беляев Б.И., Беляев М.Ю., Сармин Э.Э., Гусев В.Ф., Десинов Л.В., Иванов В.А., Крот Ю.А., Мартинов А. О., Рязанцев В.В., Сосенко В.А. Устройство и летные испытания научной аппаратуры «Видеоспектральная система» на борту Российского сегмента МКС//Космическая техника и технологии. 2016. № 2(13). С. 70-79.
- Беляев М.Ю., Виноградов П.В., Десинов Л.В., Кумакшев С.К., Секерж-Зенькович С.Я. Идентификация источника океанских кольцевых волн около острова Дарвин по фотоснимкам из космоса//Известия РАН. Теория и системы управления. 2011. № 1. С. 70-81.
- Беляев М.Ю., Десинов Л.В., Караваев Д.Ю., Легостаев В.П. Использование съемки земной поверхности с МКС в интересах топливно-энергетического комплекса//Известия РАН. Энергетика. 2013. № 4. С. 75-90.
- Беляев М.Ю., Десинов Л.В., Караваев Д.Ю., Легостаев В.П., Рязанцев В.В., Юрина О.А. Особенности проведения и использования результатов съемки земной поверхности, выполняемой экипажами Российского сегмента МКС//Космическая техника и технологии. 2015. № 1(8). С. 17-30.
- Беляев Б.И., Беляев М.Ю., Десинов Л.В., Катковский Л.В., Крот Ю.А., Сармин Э.Э. Результаты испытаний фото-спектральной системы на МКС//Исследование Земли из космоса. 2014. № 6. С. 27-39.
- Беляев Б.И., Беляев М.Ю., Десинов Л.В., Катковский Л.В., Сармин Э.Э. Обработка спектров и изображений с фото-спектральной системы в космическом эксперименте «Ураган» на МКС//Исследование Земли из космоса. 2014. № 6. С. 54-65.
- Беляев Б.И., Катковский Л.В. Оптическое дистанционное зондирование. Минск: БГУ, 2006. 400 с.
- Беляев М.Ю., Рулев Д.Н. Оптимизация планирования экспериментов, выполняемых на орбитальных станциях//Космические исследования. 2007. Т. 45. Вып. 3. С. 236-243.
