Система регистрации спектров МОРС-4 c микрокомпьютером Raspberry PI 3 Model B

Автор: Новиков Д.В., Станкевич А.С., Силькис Эммануил Гершович, Торубаров А.М., Перепелкин Г.А.
Журнал: Научное приборостроение @nauchnoe-priborostroenie
Рубрика: Работы с конференции
Статья в выпуске: 3 т.28, 2018 года.
Бесплатный доступ
Создан прибор МОРС-4 с добавлением серийного микрокомпьютера (МК) с широкими операционными возможностями и проработанным программным обеспечением. МК является крайне удобной частью электроники современных систем регистрации спектров на линейных приборах с зарядовой связью (ПЗС). При вводе МК в электронику МОРС-4 удается использовать ряд достоинств МК - возможность работы с флеш-памятью, значительное число входов/выходов, позволяющих легко соединить МК с типовой платой электроники управления ПЗС и индикацию режимов прибора. Прибор позволяет дистанционно работать на 4 датчиках на линейных ПЗС c питанием от аккумулятора. Техническое задание по управлению ПЗС и полученные данные фиксируются на флеш-накопитель. Прибор МОРС-4+МК использовался для контроля механических напряжений авиационных деталей по отраженному рентгеновскому излучению радионуклида Fe-55 с энергией квантов 5.89 и 6.45 кэВ. Для их регистрации в ПЗС типа TCD1304DG удаляют стекло.
Линейные приборы с зарядовой связью, системы регистрации на линейных пзс, микрокомпьютер, программное обеспечение
Короткий адрес: https://sciup.org/142214867
IDR: 142214867 | УДК: 631.396.6 | DOI: 10.18358/np-28-3-i2428
The MORS-4 spectra recording system with the Raspberry PI 3 Model B microcomputer
The device MORS-4 with addition of the serial microcomputer (MС) with wide operational possibilities and the developed software is created. MС is an extremely convenient part of the electronic of modern systems for recording spectra on linear charge-coupled devices (CCDs). When the MС is included into the MORS-4 electronics, it is possible to use a number of advantages of the MC - the ability to work with flash memory, a significant number of inputs/outputs that allow easy connection of the MC to a typical CCD control electronics board and indication of the device modes. The device allows to remotely operate on 4 sensors on linear CCD, powered by a battery. The technical task for controlling the CCD and the obtained data are recorded on a flash drive. The device MORS-4 + MC was used to control the mechanical stresses of aviation components by the reflected X-ray radiation of the Fe-55 radionuclide with a photon energy of 5.89 and 6.45 keV. To register them the glass must be removed from the CCD of the TCD1304DG type.
Текст научной статьи Система регистрации спектров МОРС-4 c микрокомпьютером Raspberry PI 3 Model B
Сфера применений систем регистрации спектров (СРС) типа МОРС [1] постоянно расширяется. Например, необходимо решать задачи дистанционного использования таких систем, связанных со спецификой тех или иных измерений, в частности, измерение поверхностных механических напряжений компонентов авиационных устройств в полевых условиях [2, 3]. Для некоторых измерений требуется СРС с малой длительностью кадра экспозиции (4–10 мс) и возможностью регистрировать несколько десятков тысяч последовательных кадров экспозиции.
В настоящей работе приводится описание разработанной нами системы регистрации МОРС-4 (с возможностью использовать до 4 датчиков на линейных ПЗС) с микрокомпьютером (МК) типа Raspberry Pi 3 Model B. Это недорогое устройство с достаточно широким набором входов и выходов для подключения различных устройств. Прибор МК-МОРС-4 разрабатывался по специальному техническому заданию: работа с ПЗС без стекла (рентгеновский диапазон излучения), работа с аккумулятором (без подключения к сети), перенос информации в базовый компьютер с помощью типового флеш-накопителя.
ОПИСАНИЕ БЛОК–СХЕМЫ ПРИБОРА
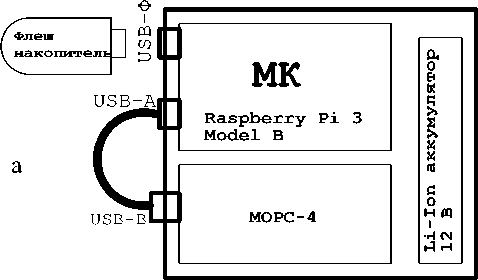
Блок–схема прибора МК-МОРС-4 приведена на рис. 1. Электроника управления ПЗС, микро-
б
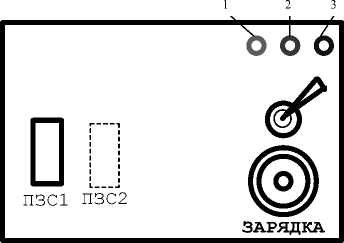
Рис. 1. .Блок-схема прибора МК-МОРС-4 и вид его
лицевой панели.
а — блок-схема прибора с его основными компонентами: МК, электроника управления ПЗС типа МОРС-4, аккумуляторная сборка Li-Ion (2200 mAh, 12 V); б — лицевая панель прибора с тремя индикационными светодиодами 1, 2, 3 разного цвета, гнездом зарядки аккумулятора "Зарядка", тумблером отключения аккумулятора от электроники, выходами ПЗС1 и ПЗС2 для подключения ПЗС компьютер и платы управления индикацией расположены в стандартном корпусе типа G0347. Датчик с платой ПЗС располагается в специальном блоке вместе с исследуемым объектом и соединяется кабелем длиной в 10 см с разъемом "ПЗС1" на корпусе прибора. Для подзарядки аккумулятора используется типовое устройство зарядки для Li-Ion аккумуляторов. Индикаторный синий светодиод (3) указывает на наличие нормального уровня заряда аккумулятора. Аккумулятор обеспечивает не менее 3 часов непрерывной работы МК-МОРС-1. К одному из 4 USB-разъемов МК — гнезду USB-Ф подключается типовой флеш-накопитель. Второй выход МК USB-А через короткий внешний кабель и разъем USB-B используется для связи МК и платы управления ПЗС (рис. 1, а). Разъем USB-B может использоваться также для режима управления ПЗС непосредственно от компьютера и настройки платы управления ПЗС.
На лицевой панели расположены еще два индикаторных светодиода красного (2) и зеленого (1) света, которые позволяют провести оценки: сбоя МК; проведение рабочей экспозиции; нормальное завершение цикла работы.
Цикл работы заключается в следующем. В основном компьютере в определенном формате записывается задание на единичную экспозицию (длительность накопления и считывания цикла работы ПЗС, количество циклов ПЗС). После установки в разъем USB-Ф флеш-накопителя происходит считывание этой информации МК. Далее МК начинает управлять работой ПЗС в соответствии с заданием, а после завершения экспозиции информация также в определенном формате записывается на флеш-накопитель. Далее флеш-накопитель переносится в типовой компьютер, где происходит обработка полученных данных. В данной конкретной модификации МК-МОРС-4 спектр записывался в режиме "Серия", т. е. без суммирования циклов накопления. Специальная программа обработки кадров серии выделяет нужную группу кадров. Прибор является современной версией мобильного прибора, описанного в работах [2, 3].
ВЫБОР ТИПА МК
На микрокомпьютере Raspberry Pi 3 Model B установлен 4-ядерный процессор ARMv8, работающий на частоте 1.2 ГГц, что обеспечивает более чем достаточную для получения данных производительность. Микрокомпьютер имеет 1 Гб оперативной памяти, в качестве жесткого диска используется microSD-карта памяти. При использовании операционной системы Ubuntu Mate для программ пользователя доступно около 700 Мб оперативной памяти, что позволяет хранить не менее 35 000 кадров со спектрами с одного линейного ПЗС (в данном случае кадр с одного ПЗС представлен 3694 16-битными значениями). Дистрибутив Ubuntu Mate был выбран как один из самых распространенных дистрибутивов системы Linux из предлагаемых производителем МК Raspberry, готовых к установке на данный МК. Наличие USB-входов, сетевых интерфейсов и HDMI-выхода на стандартный монитор позволяет использовать МК как обычный компьютер, в то же время использование мыши, клавиатуры и монитора для конкретной модификации МК-МОРС-1 необязательно. При подключении монитора можно оперативно установить причину сбоя в МК. Помимо стандартных компьютерных интерфейсов данный микрокомпьютер имеет 28 выводов общего назначения, которые можно конфигурировать для получения или отправки сигналов. Именно к этим выводам подключена электроника управления индикаторными светодиодами. Электроника управления ПЗС данного прибора позволяет при необходимости подключить еще не менее трех датчиков на ПЗС. Связь МК и электроники управления ПЗС осуществляется через контроллер Cypress CY7C68013A.
ОСНОВНЫЕ ФУНКЦИИ ПРОГРАММЫ МК
-
1. Программа МК реагирует на подключение в разъемы USB МК регистратора МОРС-4 и флеш-накопителя с заданием. Обнаружив подключенный через микроконтроллер CY7C68013A регистратор, программа загружает в микроконтроллер микропрограмму (если она еще не загружена), и регистратор готов к работе по заданию. Обнаружив флеш-накопитель, программа его подключает и считывает задание, а по окончании работы отключает для обеспечения возможности его безопасного извлечения.
-
2. После завершения получения данных программа записывает их на флеш-накопитель для дальнейшей обработки.
-
3. Программа работает с выводами общего назначения МК для индикации режима работы путем включения и выключения индикаторных светодиодов.
-
4. После завершения работы программа автоматически выключает МК.
-
5. Для манипуляций с флеш-накопителем и для выключения МК программе были даны на это права в настроечных файлах системы. Для обеспечения взаимодействия операционной системы (Ubuntu) с программой в стандартных системных папках были размещены специальные скрипты, которые вызываются системой при подключении к USB-входам/ выходам МК целевых устройств. В данных скриптах содержатся команды поиска
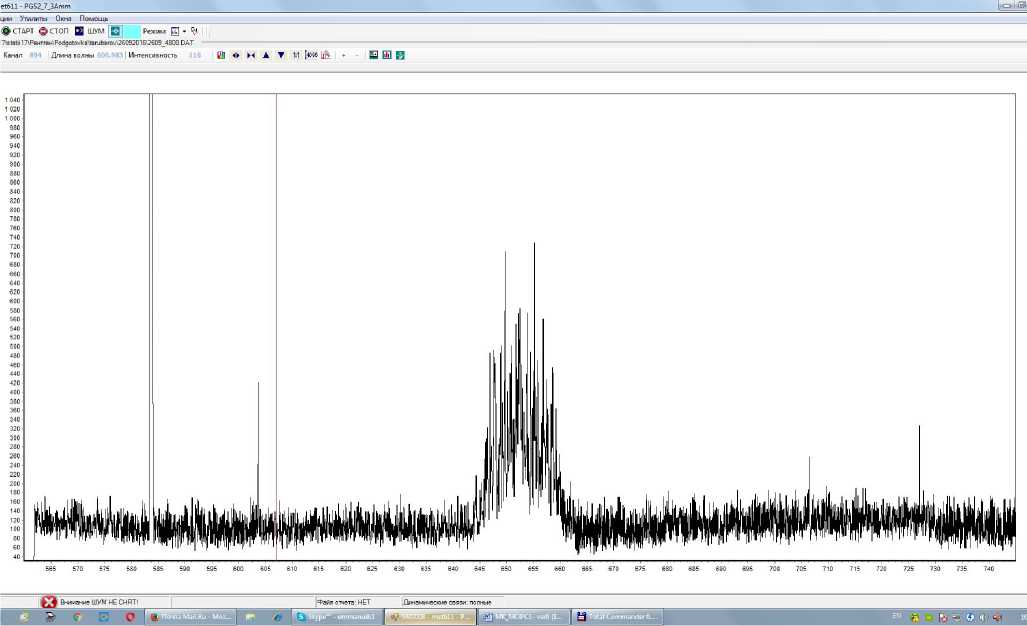
Рис. 2. Вид сигнала в спектральном окне программного обеспечения регистратора МОРС-4 при измерении механических напряжений.
Сигнал регистрируется в каналах ПЗС с 645 по 665
-
6. В случае возникновения ошибок программа записывает на флеш-накопитель файл с описанием ошибки (если не возникло ошибки при обращении к флеш-накопителю), одновременно индицируя ошибку с помощью индикаторного светодиода.
уже запущенной программы и обращения к ней (программа запускается автоматически сразу после загрузки системы). Таким образом, программа в составе прибора требует от пользователя минимума действий: подключить флеш-накопитель с заданием; включить прибор; дождаться завершения работы; извлечь флеш-накопитель.
ОСНОВНЫЕ ВОЗМОЖНОСТИ ПРИБОРА И ПРИМЕР ПРИМЕНЕНИЯ
Прибор использовался для неразрушающего экспресс-анализа остаточных и рабочих поверхностных напряжений в авиационных деталях. Компоненты прибора (излучатель, методика и конструкция) подробно описаны в работе [2]. В качестве излучающего элемента использован радионуклид Fe-55 с энергией рентгеновских квантов 5.89
и 6.45 кэВ. Для их регистрации в ПЗС типа 1304DG удаляют стекло. Типовой сигнал от МОРС-4, полученный с одного датчика при измерении механических напряжений по отраженному рентгеновскому излучению, приведен на рис. 2.
Шумы в пикселях ПЗС (в которых не регистрируется сигнал) позволяют вычислить среднеквадратичное отклонение (СКО) шума и выбрать уровень дискриминации, относительно которого и измеряется рабочий сигнал. В диапазоне длительности цикла накопления и считывания ПЗС ( Т ц ), равном 40–200 мс, шумы ПЗС практически неизменны. Для повышения точности рекомендуется в начале цикла измерений производить контроль шумовой характеристики ПЗС. Типовое значение 5 СКО шума лежит в пределах 15–20 отсчетов АЦП электроники МОРС-4.
Обработка сигналов с флеш-накопителя (в форме dat-файла) осуществляется специализированной программой в основном компьютере. Типовые спектры от детали с нормальным остаточным напряжением (МОо) и с напряженными состояниями МО+ (сжатие) и МО- (растяжение) представлены
АЦП
4095-
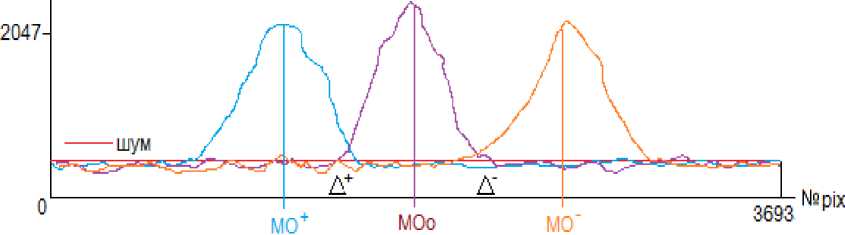
Рис. 3. Амплитудные распределения сигналов от деталей с нормальным остаточным напряжением (МОо) и с напряженными состояниями: МО+ (сжатие) и МО- (растяжение)
на рис. 3. На начальном этапе подпрограмма обработки серии кадров выделяет и суммирует "рабочие кадры" серии. Каждое из распределений на рис. 3 — это обработанный сигнал серии из 20–50 кадров. Основной характеристикой такого сигнала является математическое ожидание (МО) некоего пространственного распределения отклика выше уровня дискриминации, т. е. центр тяжести распределения, определяемый с точностью до 0.1 пикселя. При программируемом уровне величины с/ш (равном, например, 5) программа обрабатывает шум, задает уровень дискриминации, выделяет из серии кадры, содержащие сигнал, превышающий уровень дискриминации, и суммирует такие кадры. Затем определяет параметр МО распределения. На рис. 3 приведен суммированный уровень дискриминации.
По значению МО в специализированной программе [2, 3] определяется угол дифракции облучения, величина его отклонения от нормального МОо (определяемого при отсутствии поверхностных механических напряжений в контролируемом объекте). Далее вычисляется величина и направление остаточных или рабочих поверхностных напряжений. На практике измеренное положение МО+ или МО- может отличаться от нейтрального положения МОо на величину до двух угловых градусов.
ЗАКЛЮЧЕНИЕ
Прибор типа МК-МОРС-4 может быть использован для дистанционных измерений спектров в диапазоне 200–1000 нм и в определенном рентгеновском диапазоне в труднодоступных или опасных для присутствия пользователя местах. Продемонстрированы результаты работы прибора при измерении механических напряжений по отраженному рентгеновскому сигналу от излучателя типа радионуклид Fe-55. Созданный прибор может работать с количеством линеек ПЗС от 1 до 4, но могут быть созданы модификации прибора с количеством линеек ПЗС до 24. Также возможна модификация прибора с управлением и обменом данными по компьютерной сети (по кабелю Ethernet) или по WiFi.
Список литературы Система регистрации спектров МОРС-4 c микрокомпьютером Raspberry PI 3 Model B
- Силькис Э.Г., Станкевич А.С., Крашенниников В.Н. Системы регистрации спектров, миниспектрометры и эмиссионные спектрометры//Вузовско-академический сборник научных трудов "Проблемы спектроскопии и спектрометрии". Екатеринбург, 2014. С. 43-67.
- Перепелкин Г.А., Торубаров А.М., Чугаев Б.Н. Интерфейс прибора для неразрушающего контроля остаточных поверхностных напряжений//Прикладная информатика. 2016. № 1. С. 70-73.
- Калмыков Э.А., Торубаров А.М. Способ экспресс-анализа механических поверхностных напряжений поликристаллических материалов и параметров их кристаллической решетки и устройство для его осуществления. Патент РФ №2387980 от 27 апреля 2010 г.
