Системный анализ и динамическое моделирование как инструменты междисциплинарного проектирования адаптивного круиз-контроля

Автор: И. К. Кубышкин
Журнал: Informatics. Economics. Management - Информатика. Экономика. Управление.
Рубрика: Системный анализ, управление и обработка информации
Статья в выпуске: 4 (2), 2025 года.
Бесплатный доступ
В статье рассматривается применение системного подхода к начальному этапу проектирования адаптивного круиз-контроля. Рассматриваются ключевые элементы системного анализа: определение заинтересованных сторон, формулирование их целей и потребностей, а также описание внешнего окружения системы с помощью контекстной диаграммы. На основе выявленных требований заинтересованных сторон построена математическая модель продольной динамики транспортного средства. Данная модель рассматривается как адекватная поведенческая основа системы, предназначенная для дальнейшей разработки и верификации функций системы. В условиях ограниченного объема проектных данных акцент сделан на взаимосвязи между системным анализом и начальной фазой моделирования, без перехода к полной архитектурной разработке. Представленный подход подчёркивает значимость системной инженерии даже на ранних этапах разработки интеллектуальных транспортных систем.
Адаптивный круиз-контроль, системная анализ, системная инженерия, междисциплинарный подход, имитационная модель, продольная динамика транспортного средства, интеллектуальные транспортные системы
Короткий адрес: https://sciup.org/14132673
IDR: 14132673 | УДК: 303.732.4+004.942+656.13 | DOI: 10.47813/2782-5280-2025-4-2-2012-2017
Текст статьи Системный анализ и динамическое моделирование как инструменты междисциплинарного проектирования адаптивного круиз-контроля
DOI:
Современные интеллектуальные транспортные системы предъявляют высокие требования к безопасности, энергоэффективности и удобству эксплуатации. Адаптивный круиз-контроль (АСС) представляет собой ключевую технологию, направленную на автоматическое поддержание безопасной дистанции между автомобилями, снижая нагрузку на водителя и повышая безопасность дорожного движения. Несмотря на активное развитие этой технологии, остаются открытыми вопросы интеграции разнородных методов проектирования, в частности, системной инженерии и имитационного моделирования.
Цель данной работы заключается в демонстрации эффективности междисциплинарного подхода к проектированию АСС. Задачи исследования включают: применение системной инженерии на ранних этапах проектирования, построение имитационной модели на основе продольной динамики, анализ поведения системы в различных дорожных сценариях.
МАТЕРИАЛЫ И МЕТОДЫ
Процесс проектирования АСС опирается на метод системной инженерии, включающую следующие этапы: определение заинтересованных сторон и их требований, формализация спецификаций, архитектурное моделирование, выбор критериев валидации и последующее тестирование [1]. Каждый из этапов отражает системный подход к построению сложных технических решений.
Имитационная модель была реализована в MATLAB/Simulink и основывается на продольной динамике транспортного средства (ТС), описанной в книге Rajamani [2]. Модель учитывает массу автомобиля, аэродинамическое сопротивление, сопротивление качению, силу тяги и торможения. Используемые параметры выбраны на основе типичных характеристик легкового автомобиля. Предполагается движение по прямолинейному участку дороги без бокового ветра и уклона.
РЕЗУЛЬТАТЫ
На начальном этапе проектирования системы адаптивного круиз-контроля был проведён системный анализ, включающий идентификацию заинтересованных сторон (ЗС), их проблем, потребностей и целей. Полученные результаты легли в основу формулирования требований, отражающих ожидания внешнего окружения относительно функционирования разрабатываемой системы. Эти требования описывают, какие свойства должна демонстрировать система, чтобы обеспечить соответствие нормативным стандартам, повысить безопасность и удобство использования, а также снизить риски, связанные с человеческим фактором [3]. Результаты анализа представлены в Таблицах 1-4.
Таблица 1. Заинтересованные стороны.
Table 1. Stakeholders.
|
ID |
Заинтересованная сторона |
Комментарий |
|
ST.01 |
Компании-производители |
Уменьшение расхода топлива. Снижение выбросов CO2 в атмосферу |
|
ST.02 |
Водители |
Помощь в управлении ТС во время движения по шоссе. снижение утомляемости |
|
ST.03 |
Регулирующие органы |
Обеспечение безопасности движения и снижение количества аварий [4] |
|
ST.04 |
Страховые компании |
Организации, предоставляющие страховые услуги для автомобилей заинтересованы в снижении числа аварий и связанных с ними выплат |
|
ST.05 |
Разработчик системы |
Команда/отдел разработки инженерных решений |
Таблица 2. Проблемы заинтересованных сторон.
Table 2. Stakeholder problems.
|
ID |
Проблема |
Трассировка на ЗС |
|
PR.01 |
С каждым годом вводятся более жесткие экологические нормы для разработки новых автомобилей |
ST.01 |
|
PR.02 |
Высокая конкуренция на рынке автомобилей, требующая внедрения инноваций для привлечения покупателей |
ST.01 |
|
PR.03 |
Водитель ощущает повышенную усталость от длительного контроля за скоростью и дистанцией |
ST.02 |
|
PR.04 |
С увеличением количества автомобилей на шоссе увеличивается количество аварийных ситуаций и ДТП |
ST.03 |
|
PR.05 |
Регулирующие органы сталкиваются с недостатком данных для соответствия стандартам в рамках сертификации |
ST.03 |
|
PR.06 |
Высокие страховые выплаты из-за частых аварий, вызванных человеческими ошибками |
ST.04 |
Таблица 3. Требования заинтересованных сторон.
Table 3. Stakeholder goals.
|
ID |
Цель |
Трассировка |
|
StG.01 |
Обеспечить соответствие экологическим нормам |
StN.01 |
|
StG.02 |
Внедрить инновации для повышения конкурентоспособности |
StN.02 |
|
StG.03 |
Уменьшить усталость во время вождения |
StN.03 |
|
StG.04 |
Снизить количество аварийных ситуаций и ДТП |
StN.04 |
|
StG.05 |
Гарантировать соответствие системы нормативным требованиям и стандартам безопасности |
StN.05 |
|
StG.06 |
Сократить количество страховых выплат за ДТП |
StN.06 |
Таблица 4. Требования заинтересованных сторон.
Table 4. Stakeholder requirements.
|
ID |
Требование ЗС |
Трассировка на цель ЗС |
|
StR.01 |
Система должна обеспечивать режим движения, способствующий снижению выбросов CO₂ |
StG.01 |
|
StR.02 |
Система должна автоматически поддерживать безопасную скорость и дистанцию, снижая нагрузку на водителя |
StG.03 |
|
StR.03 |
Система должна уменьшать вероятность столкновений за счёт раннего реагирования на изменения трафика |
StG.04 |
|
StR.04 |
Система должна сохранять и передавать данные о событиях и режимах работы для целей сертификации [5,6] |
StG.05 |
|
StR.05 |
Система должна снижать частоту аварий, вызванных человеческим фактором, за счёт автоматизации управления |
StG.06 |
Для визуализации взаимодействия между системой и её окружением была построена контекстная диаграмма. Она отображает основные внешние элементы — датчики, исполнительные механизмы, пользователя (водителя), вспомогательные подсистемы и внешние факторы (например, дорожная обстановка), — которые обмениваются информацией и управляющими воздействиями с АСС. Такая диаграмма позволяет определить границы системы, каналы обмена данными и критически важные точки взаимодействия [7].

Рисунок 1. Контекстная диаграмма.
Figure 1. Context diagram.
М одель продольной динамики
Имитационная модель позволила проанализировать динамическое поведение системы в условиях приближения к медленно движущемуся транспортному средству, экстренного торможения и возврата к крейсерской скорости.
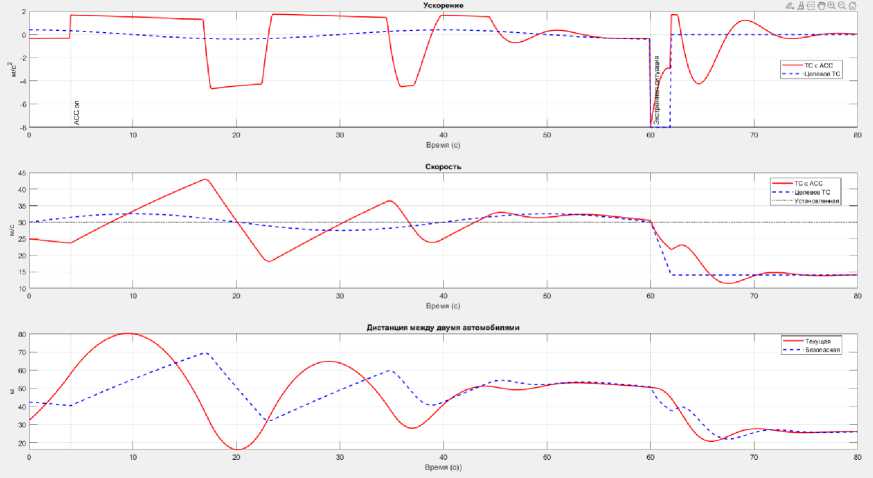
Рисунок 2. Результаты моделирования.
Figure 2. Simulation results.
Графики скорости, ускорения и межмашинной дистанции продемонстрировали, что после включения, система начинает стремиться к заданной скорости, а также поддерживать безопасную дистанцию [8]. В качестве примера адаптации к изменяющимся условиям дорожного движения представлено экстремальное торможение, при обнаружении опасности на дороге [9].
ОБСУЖДЕНИЕ
Результаты моделирования подтверждают эффективность предложенного подхода. Сравнение с литературными источниками показывает, что интеграция методов системной инженерии позволяет не только ускорить процесс разработки, но и повысить надёжность и воспроизводимость решений. Тем не менее, модель ограничена только продольной динамикой и не учитывает влияние боковых сил и многополосного движения. Это ограничивает её применение в условиях интенсивного городского трафика [10]. Расширение модели за счёт включения боковой динамики и элементов машинного обучения является перспективным направлением.
ЗАКЛЮЧЕНИЕ
В данной статье показана практическая значимость междисциплинарного подхода, основанного на синтезе системной инженерии и имитационного моделирования, для разработки адаптивного круиз-контроля. Построенная модель демонстрирует устойчивость и адекватность в различных дорожных сценариях, подтверждая корректность архитектурных решений.
Выводы исследования подтверждают, что применение системной инженерии позволяет формализовать требования, систематизировать проектирование и обеспечить воспроизводимость решений. Перспективы дальнейших исследований связаны с расширением моделей и их интеграцией в более сложные системы автономного вождения.
