Системный анализ требований и оптимизация состава группы роботов в задаче мониторинга окружающей среды

Автор: Капустян Сергей Григорьевич, Мельник Эдуард Всеволодович
Рубрика: Математика
Статья в выпуске: 2 т.16, 2024 года.
Бесплатный доступ
Для решения задач мониторинга удаленных больших территорий и областей целесообразно применение групп роботов как мобильных компонентов систем мониторинга. Рассматриваются концептуальные вопросы организации автономного функционирования таких групп роботов. Эффективность решения задач мониторинга группой роботов во многом определяется ее составом. Предлагается подход к решению задачи формирования состава групп роботов для решения задач мониторинга, базирующийся на принципах самоорганизации технических систем, технологиях мультиагентных систем и распределенного реестра.
Система мониторинга, мобильный компонент, группа роботов, мультиагентная система, принципы самоорганизации, распределенный реестр, оптимальный состав группы
Короткий адрес: https://sciup.org/147243211
IDR: 147243211 | УДК: 681.5.01 | DOI: 10.14529/mmph240202
Conceptual aspects of organizing the operation of mobile components of environmental monitoring systems
To solve the problems of monitoring large remote areas and regions, it is advisable to use groups of mobile robots as mobile components of monitoring systems. The article discusses conceptual issues of organizing the autonomous functioning of such groups of robots. The effectiveness of solving monitoring problems by a group of mobile robots is largely determined by its composition. The paper proposes an approach to solving the problem of group control of mobile robots and, in particular, solving the subtask of forming the composition of groups of mobile robots for monitoring large areas, based on the principles of self-organization of technical systems, technologies of multi-agent systems and a distributed registry. The study demonstrates that to solve this problem, intelligent multi-agent systems can be used, which include task agents and mobile robot agents. The application of the proposed approach makes it possible to form, if not optimal, then close to optimal, a group composition capable of effectively solving the prob-lems of monitoring large areas.
Текст научной статьи Системный анализ требований и оптимизация состава группы роботов в задаче мониторинга окружающей среды
Роботы находят все более широкое применение для решения задач мониторинга различных объектов и территорий и прежде всего в условиях опасных для человека, например, в зонах химического, бактериологического или радиационного заражения, а также когда непосредственное участие человека в процессе мониторинга связано со значительными затратами (финансовыми, энергетическими и др.) [1–4].
Наиболее широкое применение для этих целей нашли беспилотные летательные аппараты (БПЛА) [5]. Также применяются плавающие автономные необитаемые подводные аппараты (АНПА) [6] и беспилотные надводные корабли, например, для морских исследований и мониторинга акваторий, подводные шагающие аппараты, наземные колесные, гусеничные и шагающие роботы. Для мониторинга и диагностики состояния трубопроводов находят применение шагающие и ползающие роботы.
Однако одиночные роботы могут применяться для мониторинга относительно небольших объектов и территорий. Для решения задач мониторинга крупных и протяженных объектов, а также больших территорий и областей целесообразно применение групп роботов [7, 8].
Основными преимуществами группового применения роботов при выполнении сложного задания являются:
-
– сокращение времени выполнения задания вследствие возможности распределения отдельных его операций между роботами;
-
– повышение вероятности успешного выполнения задания, поскольку выход из строя отдельного робота не приводит к выходу из строя всей системы в целом, а операции, возложенные на этого робота, могут быть перераспределены между остальными роботами системы.
Здесь могут применяться как гомогенные, то есть состоящие из одинаковых по конструкции и функциональному назначению роботов, так и гетерогенные, то есть состоящие из различных по конструкции, функциональному назначению, а также по среде функционирования (наземные, воздушные, надводные и подводные) роботов. Для решения сложных задач, в том числе задач мониторинга сложных объектов, наиболее целесообразно применение гетерогенных групп роботов [9], так как такие группы, как правило, имеют расширенный набор функций.
При групповом использовании роботов различного назначения возникает ряд весьма сложных задач, в первую очередь, связанных с проблемой управления ими и организацией взаимодействия роботов группы между собой для наиболее эффективного достижения цели, поставленной перед группой. В особенности эта проблема относится к интеллектуальным роботам с автономной системой передвижения и навигации.
Задачу управления группой роботов, действия которых направлены на достижение общей групповой цели, называют задачей группового управления [10]. Суть задачи группового управления заключается в отыскании и реализации таких действий каждого отдельного робота группы, которые приводили бы к оптимальному, с точки зрения некоторого группового критерия, достижению общей групповой цели.
В общем случае задача группового управления роботами разбивается на ряд подзадач, среди которых можно выделить следующие подзадачи:
-
– определение состава группы, способного эффективно решать целевую задачу;
-
– распределение функций между роботами и/или планирование действий роботов для оптимального (или близкого к нему) решения целевой задачи [11];
-
– реализация функций отдельными роботами для достижения конечной цели.
Если целевая задача группы роботов одна и та же, заранее известна и должна решаться в одних и тех же заранее известных детерминированных стационарных условиях, то в этом случае задача группового управления не является сложной и решается тривиально. До начала функционирования можно определить состав группы, определить последовательность действий каждого робота группы, а далее каждый робот отрабатывает свою последовательность действий, даже не взаимодействуя друг с другом.
Задача группового управления роботами при мониторинге больших территорий естественной среды зачастую характеризуется наличием неопределенности на всех этапах ее решения, например, неточностью и неполнотой исходных данных как о целевой задаче, так и об условиях ее решения, в частности, условиях внешней среды и накладываемых ограничениях.
В области группового управления роботами исследования проводились и проводятся в направлении решения последних двух подзадач задачи группового управления. Это прежде всего управление одиночными роботами, функционирующими в составе группы, и управление группой роботов, в частности, это вопросы организации взаимодействия в группе и планирование групповых действий, в том числе и планирование траекторий движения [12, 13].
Практически во всех публикациях, посвященых задаче группового управления роботами, предполагается, что группа роботов уже сформирована, и рассматриваются вопросы распределения целей, планирования групповых действий, управления выполнением действий и т. п. Исключение, пожалуй, составляет работа [14], в которой рассматриваются концептуальные вопросы формирования состава группы робототехнических комплексов для решения специальных задач.
В то же время эффективность решения задач мониторинга во многом зависят от состава группы роботов и прежде всего от функциональных возможностей включаемых в группу роботов и их количества. Под эффективностью понимается достижение желаемого результата с минимально возможными издержками, затратами или получение максимально возможного объема результата.
В настоящей статье рассматривается один из возможных подходов к решению подзадачи формирования оптимального или близкого к оптимальному состава групп роботов, предназначенных для мониторинга больших территорий.
1. Формальная постановка задачи
Для того чтобы обеспечить возможность определения состава группы роботов в автоматическом режиме, то есть без участия человека, целевая задача должна быть определенным образом формализирована: с одной стороны, она должна формулироваться пользователем (оператором) на языке, близком к естественному, и наглядно отображаться средствами системы управления, а с другой стороны, должна восприниматься средствами системы группового управления для распределения функций между роботами группы и формирования соответствующих команд управления роботами для реализации этих функций.
Основной задачей роботов, участвующих в мониторинге окружающей среды, является измерение так называемых показателей мониторинга в контрольных точках и/или контрольных областях контролируемой территории, их предварительная обработка и передача данных в систему мониторинга для последующей обработки и обобщения.
Под показателями мониторинга понимаются количественные или качественные характери-стики/критерии, анализ которых позволяет оценить состояние объекта или процесса.
Математика
Под контрольной точкой понимается точка пространства, в которой производится измерение того или иного показателя мониторинга. Контрольная точка обычно задается координатами в некоторой системе координат (абсолютной или относительной) и при необходимости моментом времени (временным отсчетом), в который необходимо производить измерение показателя.
Контрольная область - это часть контролируемой территории, описываемая окружностью с заданными координатами центра и радиусом или многоугольником с заданными координатами вершин этого многоугольника. В контрольной области измерение некоторых показателей может осуществляться в одной или нескольких произвольных точках, принадлежащих этой области.
В общем случае задачу мониторинга некоторой территории группой роботов можно описать с помощью кортежа
T =< p , I , p p , p r , C > . (1)
Здесь p = { x 1 , x 2 ,..., x i ,..., x L } - положение контролируемой области в геометрическом пространстве, где X/ ( l = 1, L ) - координата l -й вершины многоугольника, описывающего контролируемую область; I = { I 1 , I 2 ,..., I k ,—, I K } - множество заданных показателей мониторинга контролируемой территории, где K - количество показателей; p p = { p p , p p ,..., p mm ,..., p p } - множество контрольных точек, где M - количество таких точек; p j = { p j , p 2 ,..., p j -,..., p J } - множество контрольных областей, где J - количество контрольных областей; C = { c 1 , c 2 ,..., c u ,..., c U } - множество параметров, характеристик, отражающих условия и ограничения при решении целевой задачи T, где U - количество параметров, характеристик.
Например, это могут быть временные ограничения (время начала решения задачи мониторинга, длительность ее решения, периодичность, моменты времени или временные интервалы, в которые необходимо измерять те или иные показатели и др.), точность измерения показателей, условия среды функционирования (рельеф местности, характеристики подстилающей поверхности - для наземных роботов, карта течений для надводных и подводных роботов, условия видимости - для видео- и фотосъемки), периодичность передачи данных мониторинга в наземные центры обработки и т. п.
В свою очередь, каждая контрольная точка может быть описана кортежем pmm =< xmm, Im >, m = 1, M, где xmm - координаты m-й контрольной точки; Im = {Im1,Im2,...,Im^,...,ImK^} - множество показателей, измеряемых в m-й контрольной точке.
Множество показателей, измеряемых в m -й контрольной точке, является подмножеством множества I , то есть I m с I . Количество показателей K m , измеряемых в m -й контрольной точке, может варьироваться от одного до K . Каждый показатель в одной и той же контрольной точке может измеряться несколько раз с заданной периодичностью.
Для этого каждый элемент множества I m представляется парой
Imkm =< Imkm , tmkm >, m = 1 M , где Imkm - km -й показатель (его обозначение), измеряемый в m-й контрольной точке; tmkm - периодичность измерения km -го показателя в m-й контрольной точке.
Каждая контрольная область (участок) может быть описана кортежем p j =< x j, I j >, j = 1, J, гдеxrj - координаты j-й контрольной области; Ij = {ТуpIj2,...,Ijk ,...,IjK } - множество показателей, измеряемых в j-й контрольной области.
Множество показателей, измеряемых в j-й контрольной области, является подмножеством множества I, то есть I j с I. Количество показателей Kj, измеряемых в j-й контрольной области, также может варьироваться от одного до K. Кроме того, некоторые показатели могут измеряться в нескольких произвольных точках контрольной области. Для этого каждый элемент множества I j представляется тройкой
I jkj =< Ijkj , njkj , tjkj >, j = 1, J , где Ijk - kj -й показатель (его обозначение), измеряемый в j-й контрольной области; njk - ко личество измерений kj -го показателя в j-й контрольной области; tjk - периодичность измерения kj -го показателя в j-й контрольной области.
Пусть имеется группа мобильных компонентов (роботов), предназначенных для осуществления мониторинга контролируемой территории, представляющая собой некоторое множество роботов, оснащенных средствами измерения различных показателей мониторинга, вычислительными устройствами для их обработки и средствами связи для обмена информацией:
R = { R 1 ,R2,...,R i ,..., R n } , где N - количество роботов в группе.
Каждый робот группы Rz может быть описан с помощью кортежа
R i =< I R i, P r , F R , D R i > , (2)
где I R = { I i 1 ,I i2 ,...,I ik, ,...,I iK. } - множество показателей мониторинга, которые может измерять робот Rz с использованием установленного на его борту дополнительного оборудования, Kz -количество показателей, которые может измерять робот R i ; P R - вектор состояния робота R i в геометрическом пространстве; F R - вектор физических параметров состояния робота R i ; D R -вектор физических параметров дополнительного оборудования (датчиков, средств связи, вычислительных устройств и т. д.).
Вектор состояния робота R i в геометрическом пространстве описывается кортежем
Рд. =< xR, xR, xR. >, i g1, N, i iii где xR, XR, XR - вектор текущего положения, текущей скорости и текущего ускорения робо та R в геометрическом пространстве соответственно.
Вектор F R качественных и количественных физических параметров состояния платформы робота R i представляет собой набор параметров, определяющих его возможности и выполняемые им функции. К качественным физическим параметрам состояния, например, можно отнести тип платформы робота (наземный, воздушный, надводный, подводный) и тип движителей (колесные, гусеничные, шагающие, комбинированные). К количественным показателем можно отнести: массогабаритные характеристики, максимальную скорость движения, запас энергоресурса, удельный расход энергоресурса, максимальную высоту полета, максимальную глубину плавания под водой.
Вектор F R может быть описан с помощью кортежа
Fr =< Type,, Moveri, mi, g i, vmax, ei, Ae, hi > , ie 1, N, где Typei - тип платформы робота Ri (код, условное обозначение); Moveri - тип движителя (код, условное обозначение); mi - масса робота Ri; gi - габариты робота Ri; vmax - максимальная скорость движения робота Ri; ei - запас энергоресурса (заряд батареи) робота Ri; Aei -удельный расход энергоресурса (на единицу расстояния); hi - прочие характеристики (максимальная высота полета, максимальная глубина плавания и др.).
Вектор D R качественных и количественных физических параметров дополнительного оборудования представляет перечень оборудования, с помощью которого осуществляется мониторинг контролируемой территории, в том числе получение данных об измеряемых показателях, их обработка и передача информации другим роботам группы и в центры обработки.
Математика
DR =< Lsd, L, Lcd >, i el, N, где Lsd = {OSd,Og,..,Odd,..., OsidNsd} - список (множество) сенсорных устройств, предназна ченных для измерения показателей мониторинга, Ns - количество сенсорных устройств, уста новленных на борту робота Ri; LR = {Oц,O,c,2,...,Oc^,...,OcNC} - список (множество) вычислительных устройств, предназначенных для приема, обработки, хранения и передачи сенсорных данных, Nic - количество вычислительных устройств, установленных на борту робота R ;
LR = {OCd,Oc2,...,Ocdcd,...,Ocdd} - список (множество) устройств связи для обмена данными i , , i, n i, .^г между роботами группы и передачи данных в наземные центры обработки, Ncd - количество устройств связи, установленных на борту робота Ri.
Каждый элемент Osd d списка Lsd представляет собой вектор качественных и количествен-i, ni ных параметров каждого сенсорного устройства
Osd sd sd sd sd sd sd insd =< find , dinsd , ainsd , pinsd > ’ i e1, N ’ ni e1, Ni ’
, ni , n ni , ni , ni , n ni где fsdsd - тип сенсорного устройства, измеряемый физический параметр (температура, давле-i, ni ние, скорость ветра, скорость течения и т.д.) - код, условное обозначение; dsdsd - диапазон из-i, ni мерения физического параметра; asdsd - точность измерения, разрешение сенсорного устройства; i, n p^sa - производительность сенсорного устройства, например, количество измерений в единицу времени.
С помощью этих параметров можно определить объем информации, получаемой данным сенсорным устройством за один цикл измерения, который должен поступить на вход вычислительного устройства для последующей обработки.
Каждый элемент Oc c списка Lci представляет собой вектор качественных и количествен ных параметров каждого вычислительного устройства робота Ri , предназначенного для обработки данных от сенсорных устройств:
Oc с =< fc ,ь bdc ,, pc ,v Vc c >, i elN, nc el, Nc, i,nc Ji,nc ’ i,nc , Fi,nc , i,nc , , , i , i’ где fcc - тип (код, условное обозначение); bdc c - разрядность nc -го вычислительного уст-
-
i, п, i, п,i
ройства, предназначенного для обработки данных мониторинга, получаемых от сенсорных устройств (бит); p c c - производительность n c -го вычислительного устройства (объем информации, обрабатываемой в единицу времени); V c c - объем памяти n i c -го вычислительного устройства для хранения данных мониторинга.
С помощью этих параметров и параметров сенсорных устройств, подключенных к данному вычислительному устройству, можно оценить время обработки поступающих на вход вычислительного устройства данных мониторинга от сенсорных устройств и других роботов группы, объем сохраняемых обработанных данных, длительность их хранения.
Каждый элемент Ocd cd списка Lcd представляет собой вектор качественных и количествен-i, п, ных параметров каждого устройства связи:
O cdcd =< fcdcd, dcdc,q P11^ >, i Е1Л, ncd el, Ncd , i,n; Ji,n; , i,n™ ,4i,nfd , , , i , i ’ где f cdcd – тип ncd -го устройства связи (физический принцип: оптический, радио, акустический, i,ni проводной и т. д.); d cdcd – дальность действия nicd -го устройства связи; qsdsd – пропускная способность канала связи (бит в секунду или байт в секунду).
С помощью данных параметров можно оценить время передачи данных мониторинга и определить те роботы группы, которые смогут обмениваться информацией в процессе решения задачи мониторинга контролируемой территории.
Как правило, для решения задач мониторинга используются малоразмерные роботы, способные нести весьма ограниченное количество дополнительного оборудования, и, как правило поэтому множество показателей мониторинга I R , которые может измерять робот Ri с использованием установленного на его борту дополнительного оборудования, меньше чем множество заданных показателей мониторинга контролируемой территории I , что усложняет подзадачу формирования группы роботов.
Задача заключается в том, чтобы на основе информации о целевой задаче (1), а также функциональных возможностях и текущем состоянии робота (2) сформировать группу роботов таким образом, чтобы обеспечивалось измерение показателей мониторинга с заданными параметрами и характеристиками (точность, периодичность и т. д.) и при этом минимизировались временные и/или энергетические затраты.
2. Предлагаемый подход
Научным коллективом лаборатории информационных технологий и процессов управления была предложена концепция распределенной высоконадежной реконфигурируемой системы мониторинга с мобильными компонентами в сочетании с распределенным реестром, Интернетом вещей и методами интеллектуального анализа данных [15–17]. В такой системе обмен данными между ее компонентами может осуществляться через распределенное хранилище данных в виде распределенного реестра [18, 19], в котором могут храниться не только данные измерения показателей мониторинга и результаты их обработки, но и исходные данные задачи мониторинга (1) для группы роботов, информация о текущем состоянии каждого робота, а также данные о его характеристиках и функциональных возможностях (2). При этом все компоненты системы будут получать одну и ту же информацию, независимо от того, от какого узла распределенного реестра они ее получают. При этом достаточно проработаны вопросы организации информационных обменов между компонентами системы, в том числе мобильными [19], с использованием распределенного реестра. Однако задача группового управления роботами как мобильными компонентами системы и, в частности, подзадача формирования состава группы в полной мере в настоящее время не решена.
Проблема состоит в том, чтобы по исходным данным задачи мониторинга и по данным о функциональных возможностям и текущему состоянию роботов определить те, которые наиболее эффективно смогут решить поставленную задачу. При этом необходимо учитывать возможную неопределенность, связанную с неполнотой и неточностью данных.
Идея предлагаемого подхода к решению данной проблемы была подсказана учеными научной школы Кабардино-Балкарского научного центра Российской академии наук, возглавляемого З.В. Нагоевым. В связи с этим авторы выражают признательность З.В. Нагоеву и его коллегам, а также считают своим приятным долгом поздравить Залимхана Вячеславовича Нагоева с юбилеем.
В работах [20–22] и других нашими коллегами из Кабардино-Балкарского научного центра Российской академии наук было предложено решение подобных задач с использованием интеллектуальных мультиагентных систем, основу которых составляют интеллектуальные программные агенты. При этом в работе [20] предложено использовать два типа агентов – управляющих и исполняющих.
Управляющие агенты производят контроль над исполнением задачи и обрабатывают полученные результаты [20], а каждый агент-исполнитель решает свою задачу. Для получения общего результата управляющими агентами производится композиция, интеграция частных результатов.
Для решения задачи группового управления роботами при мониторинге больших территорий также предлагается использовать мультиагентную систему, в состав которой входят агент задачи (управляющий агент), представляющий пользователя, формирующего задачу мониторинга, заин-
Математика
тересованного в результатах мониторинга, и агенты роботов, представляющие «интересы» роботов как исполнительных компонентов системы мониторинга.
Суть предлагаемого подхода заключается в следующем.
Как отмечалось выше, при использовании малоразмерных роботов для мониторинга территорий, как правило, устанавливаемое на них дополнительное оборудование позволяет измерять один–два показателя. Если же мониторинг территории требует измерения гораздо большего количества показателей, то целесообразным представляется декомпозиция задачи (1) мониторинга T контролируемой территории на подзадачи, каждая из которых связана с измерением одного из множества показателей I , каждая из которых связана с измерением одного из показателей мониторинга, то есть
T = { Т 1 , T 2,..., T p ,..., Т , } . (3)
В этом случае каждая подзадача T p может быть представлена кортежем
T p =< Р p , Р k , C к >, k e 1^, (4)
где p p = { p px , p P 2,..., p P j ,™, p Pm t} — множество контрольных точек, в которых измеряется к -й показатель, Мк - количество таких точек; p rIk = { p к 1 , p к 2 ,..., p j ,—, p J } — множество контрольных областей, в которых измеряется к -й показатель, J p - количество контрольных областей; C к = { с к 1 , с к 2 ,..., с puk ,..., сш } - множество параметров, характеристик, отражающих условия и ограничения при измерении к -го показателя (точность измерения, периодичность, время измерения, приоритет (степень важности) показателя) , Jk - количество параметров, характеристик.
Каждая контрольная точка pp задается ее координатами в пространстве, а каждая кон-kmk трольная область pp задается координатами вершин многоугольника, описывающего данную область.
В этом случае задача заключается в том, чтобы в состав группы включить те роботы, которые могут решить подзадачи наиболее эффективно. При этом одна подзадача может решаться как одним, так и несколькими роботами, а каждый робот может участвовать в решении как одной подзадачи, так и нескольких (если позволяет дополнительное оборудование).
Декомпозицию задачи, то есть преобразование (1) в (3), предлагается, как и в работе [20], возложить на агента задачи (управляющего агента).
Агенты роботов на основе исходных данных определяют, в решении каких подзадач и с какой эффективностью (или затратами) могут участвовать роботы, которых они представляют. Исходными данными являются все данные о подзадаче (4), данные о функциональных возможностях (так называемые паспортные данные) роботов и установленного на них дополнительного оборудования, а также данные о текущем состоянии роботов (текущие координаты, параметры движения, запас энергоресурса и т. д.).

Пользователь
Распределенный реестр
Задача Т
Робот Ri
Робот KN
Агент робота К2
Агент робота R v
Робот Ri
Подзадача
Тг
Подзадача Т,
Агент задачи
Агент робота R,
Подзадача
К
Рис. 1. Организационная схема решения задачи группового управления роботами
Упрощенная организационная схема решения задачи группового управления роботов муль-
тиагентной системой представлена на рис. 1.
Предлагаемый подход работает следующим образом.
Пользователь с помощью специального приложения формирует целевую задачу (1), используя графические и текстовые редакторы. При этом он задает границы контролируемой территории, используя, например, цифровые карты, определяет перечень показателей мониторинга, для каждого показателя определяет контрольные точки и задает их координаты, также задает границы контрольных областей, определяет временные параметры (начало мониторинга, длительность и т. д.), определяет другие условия решения задачи, а также условия среды функционирования и т. д.
После того как задача сформирована, инициируется работа агента задания, который может взаимодействовать и с приложением, с помощью которого формируется задача, и с агентами роботов через распределенный реестр. Агент задачи преобразует задачу (1) к виду (3) и (4), размещает необходимую информацию в распределенном реестре и там же размещает информацию о готовности задачи и основные параметры задачи (начало решения и длительность). Агенты роботов периодически обращаются к распределенному реестру, запрашивая информацию о готовности какой-либо задачи. Как только они получают такую информацию, в первую очередь каждый из них определяет, сможет ли их робот принять участие в решении задачи в заданных временных рамках, то есть будет ли он свободен к началу решения задачи. Далее в формировании группы участвуют только те агенты, роботы которых будут свободны.
Формирование состава группы предлагается осуществлять в два этапа. На первом этапе формируются списки роботов-претендентов, а на втором осуществляется оптимизация состава.
При этом претендентами на включение в состав группы могут являться только те роботы, для которых выполняется условие
I r n I ^0 , (5) то есть, другими словами, только те роботы, которые могут измерять хотя бы один показатель мониторинга.
Если условие (5) выполняется, то проверяется, можно ли измерять показатели с заданными параметрами (точность, периодичность, время измерения и т. д.). Для этого используются паспортные данные дополнительного оборудования и требования к измерению параметров, заданные при формировании целевой задачи. В этом случае претендентами на включение в состав группы могут являться только те роботы, оборудование которых может измерять хотя бы один показатель с параметрами не хуже заданных.
Далее для каждого робота-претендента необходимо определить затраты, например, временные или энергозатраты, на решение тех подзадач, на которые он претендует, а также определить часть каждой подзадачи, которую он способен выполнить.
Данные функции возлагаются на агентов роботов. Задача определения затрат на выполнение тех или иных подзадач, особенно в условиях обозначенной выше неопределенности, является сложной и зачастую не может иметь численного решения.
Наиболее целесообразным представляется использование в качестве агентов роботов так называемых интеллектуальных агентов на основе искусственных нейронных сетей (ИНС) [23], также могут использоваться, например, агенты, функционирующие на основе продукционных [24] или нечетко-продукционных [25] моделей.
При использовании агентов на основе ИНС на вход сети подаются все исходные данные, содержащиеся в (4) и (2), результатом является оценка возможности участия робота в решении подзадачи, полнота решения подзадачи (то есть робот способен полностью решить подзадачу за отведенное время или только ее часть и какую), а также оценка затрат на ее решение. Если робот может решать подзадачу за отведенное время хотя бы частично, агент робота направляет через распределенный реестр агенту задачи заявку на включение в состав группы, содержащую номер подзадачи, номер робота и полученное с помощью ИНС решение.
Ввиду ограниченного объема статьи мы не будем приводить подробное описание алгоритмов функционирования агентов, ограничимся кратким описанием основных этапов решения подзадачи формирования состава группы и основных действий агентов. Также не будем рассматривать вопросы обучения ИНС.
После того как все агенты роботов сформировали заявки, агент задачи формирует списки претендентов. В первый список включаются только те роботы, которые способны решить хотя
Математика

Рис. 2. Сформированная пользователем задача мониторинга
бы одну подзадачу полностью. Во второй список включаются роботы, которые могут решать хотя бы одну подзадачу, но частично.
Далее агент задачи проверяет, могут ли все роботы из первого списка решить все подзадачи, то есть измерить все показатели за отведенное время. Если да, то в дальнейшем в процессе формирования состава группы участвуют только роботы из этого списка. Если роботов из первого списка недостаточно для решения всех подзадач, то для решения оставшихся подзадач агент задачи из второго списка выбирает те роботы, которые могут участвовать в их решении и обеспечивают их решение в полном объеме. Если и во втором списке нет роботов, которые бы обеспечили решение оставшихся подзадач, то агент задачи извещает пользователя, сформировавшего целевую задачу, о невозможности ее решения при заданных параметрах. Требуется ее корректировка, например, сдвиг времени начала решения, или увеличение длительности, или уменьшение количества контрольных точек и/или контрольных областей, или уменьшение количества показателей, а следовательно, и подзадач.
Если роботов достаточно для решения целевой задачи в полном объеме, то реализуется второй этап - оптимизация состава. На данном этапе может использоваться несколько модифицированный метод, предложенный в [26], который мы также не будем подробно описывать. Фактически на этом этапе решаются сразу две подзадачи задачи группового управления роботами - формирование состава группы и распределение подзадач задачи мониторинга между роботами группы.
Рассмотрим работу предлагаемого подхода на простом модельном примере.
Пусть в некоторой заданной области в рамках задачи мониторинга нужно измерить четыре показателя в заданных контрольных точках в заданной последовательности, причем первый показатель - в семи точках, второй - в четырех, третий -в пяти и четвертый - в трех.
На рис. 2 представлена сформированная пользователем задача мониторинга. Здесь на карте обозначены контрольные точки, каждая из которых обозначена цифрами. Первая цифра - это номер показателя, а вторая - порядковый номер точки, определяющий последовательность измерения показателя.
На этапе формирования списков в претенденты попало четыре робота. При чем все роботы-претенденты могут полностью решать одну или несколько подзадач, то есть измерять один или несколько показателей. Например, первый из роботов может измерять только показатель 1, второй - показатели 3 и 1 (в порядке возрастания затрат, например, энергозатрат),
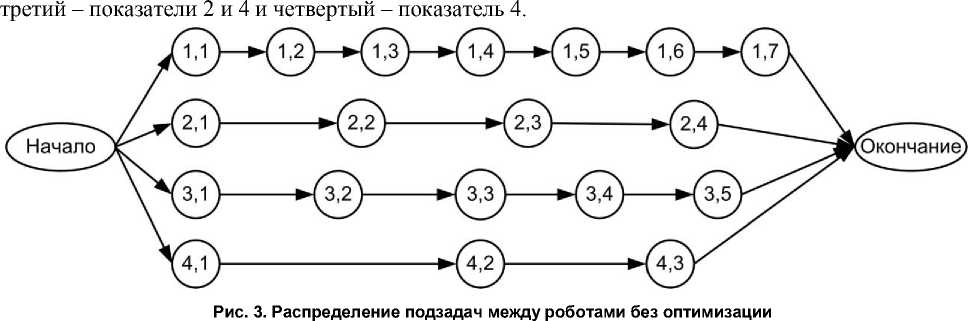
Без оптимизации состава распределение подзадач между роботами-претендентами может выглядеть, как на рис. 3.
После этапа оптимизации по критерию суммарных энергозатрат распределение подзадач между роботами группы представлено на рис. 4. В результате реализации второго этапа в составе группы осталось три робота, способных с меньшими суммарными энергозатратами решить целевую задачу.
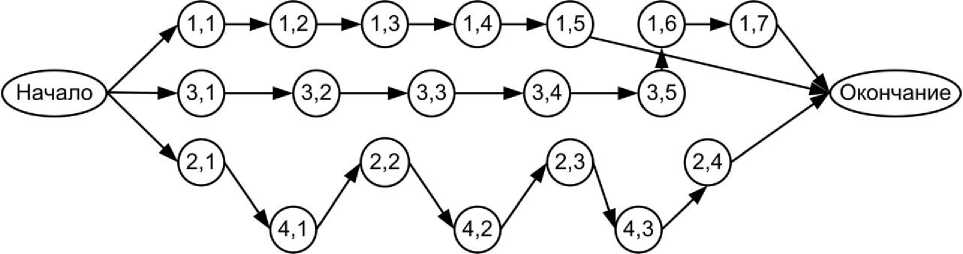
Рис. 4. Распределение подзадач между роботами после оптимизации
Заключение
Таким образом, предложен подход к решению задачи группового управления мобильными компонентами систем мониторинга, в частности, к решению подзадачи формирования оптимального или близкого к оптимальному состава группы мобильных компонентов (роботов) систем мониторинга для различных областей применения.
Предложенный подход базируется на принципах самоорганизации технических систем, технологиях мультиагентных систем и распределенного реестра.
Данный подход позволяет на основе исходных данных о поставленной задаче, условиях среды функционирования и функциональных возможностях имеющихся роботов автономно, т. е. без непосредственного участия человека сформировать группу роботов, способную эффективно решить поставленную перед ней задачу.
При этом предложенный подход позволяет обеспечить преимущественно использование тех роботов, которые могут измерять максимально возможное количество показателей, с использованием установленного на борту оборудования, то есть участвовать в решении максимально возможного количества подзадач.
Исследование проведено в рамках реализации ГЗ ЮНЦ РАН, № гр. проекта 122020100270-3.
Список литературы Системный анализ требований и оптимизация состава группы роботов в задаче мониторинга окружающей среды
- Катун, Е.С. Основные виды роботов и направления их дальнейшего развития / Е.С. Катун // Материалы XXXVIII Международной научно-практической конференции «Научные открытия 2018». – 2018. – С. 60–64.
- Поляков, Р.Ю. Робот-инсекоптер для мониторинга окружающей среды / Р.Ю. Поляков, С.В. Ефимов, С.Ф. Яцун // Вестник Воронежского института ГПС МЧС России. – Вып. 3(15). – 2015. – С. 48–51.
- Bogue, R. The role of robots in environmental monitoring / R. Bogue // Industrial Robot. – 2023. – Vol. 50, no. 3. – P. 369–375.
- Давид, Б. Роботы для мониторинга окружающей среды: эффективные инструменты для контроля и охраны природы // URL https://nauchniestati.ru/spravka/roboty-dlya-monitoringa-okruzhayushhej-sredy/ (дата обращения: 25.02.2024).
- Шевченко, О.Ю. Использование беспилотных летательных аппаратов для ведения мониторинга использования территорий / О.Ю. Шевченко, А.Б. Боричевский // Экономика и экология территориальных образований. – 2015. – № 3. – С. 150–152.
- Опыт использования АНПА типа MT-2010 для экологических исследований в бухте Золотой Рог / А.В. Инзарцев, А.А. Борейко, А.И. Боровик и др. // Экологические системы и приборы. – 2018. – № 12. – С. 38–45.
- Разработка группы мобильных роботов для мониторинга окружающей среды / И.О. Берестнев, Д.В. Зезюлин, Д.Ю. Тюгин и др. // Транспортные системы. – 2018. – № 2(8). – С. 19–24.
- Сафаров, Д.И. Мониторинг гидросферы группой роботов / Д.И. Сафаров, С.В. Ефимов, С.Ф. Яцун // Информационные технологии и нанотехнологии (ИТНТ-2021). Сборник трудов по материалам VII Международной конференции и молодежной школы. Том 3. г. Самара, 20–24 сентября 2021 г. – Самара, 2021. – Т. 3. – С. 33753.
- Куличенко, А.Д. Исследование возможностей применения гетерогенной группы роботов для поиска и локализации источников ионизирующего излучения / А.Д. Куличенко, Е.Ю. Смирнова // Экстремальная робототехника. – 2018. – № 1 (29). – № 1. – С. 171–179.
- Каляев, И.А. Модели и алгоритмы коллективного управления в группах роботов. / И.А. Каляев, А.Р. Гайдук, С.Г. Капустян. – М.: ООО Издательская фирма «Физико-математическая литература», 2009. – 280 c.
- Каляев, И.А. Самоорганизующиеся системы группового управления интеллектуальными роботами / И.А. Каляев, А.Р. Гайдук, С.Г. Капустян // Мехатроника, автоматизация, управление. – 2010. – № 12. – С. 47–52.
- Попов, С.Г. Исследование алгоритма обследования местности гетерогенной группой автономных мобильных роботов / С.Г. Попов, А.С. Крашенников, М.В. Чуватов // Робототехника и техническая кибернетика. – Т. 7, № 4. – 2019. – С. 278–290.
- Дивеев, А.И. Применение эволюционного алгоритма «серого волка» для решения задачи оптимального мониторинга местности группой роботов / А.И. Дивеев, Е.Ю. Шмалько // Cloud of science. – 2018. – Т. 5, № 4. – С. 638–648.
- Концепция формирования оперативной группы РТК / В.Х. Пшихопов, А.Р. Гайдук, М.Ю. Медведев и др. // Известия ЮФУ. Технические науки. – 2020. – № 1 (211). – С. 6–16.
- Orda-Zhigulina, M.V. Combined Method of Monitoring and Predicting of Hazardous Phenome-na / M.V. Orda-Zhigulina, E.V. Melnik, D.Y. Ivanov et al. – In: Silhavy, R. (eds) Software Engineering Methods in Intelligent Algorithms. CSOC 2019. Advances in Intelligent Systems and Computing. – Vol. 984. – Springer, Cham, 2019. – P. 55–61.
- Комбинированный подход к построению средств мониторинга и прогнозирования опа-ных природных явлений / М.В. Орда-Жигулина, Э.В. Мельник, Д.Я. Иванов и др. // Известия Тульского государственного университета. Технические науки. – 2018. – № 9. – С. 107–116.
- Применение когнитивного анализа при построении имитационной модели системы мониторинга и прогнозирования поведения гидроэкосистемы / Г.В. Горелова, Э.В. Мельник, М.В. Орда-Жигулина, С.Г. Капустян // Системный анализ в проектировании и управлении: сборник научных трудов XXVI Международной научно-практической конференции, 13–14 октября 2022 года: [в 3 частях]. – СПб: ПОЛИТЕХ-ПРЕСС. – 2023. – Ч. I. – С. 205–215.
- Помазкова, Е.Е. Сравнительный анализ блокчейна и альтернативных технологий распределенного реестра / Е.Е. Помазкова // Международный журнал гуманитарных и естественных наук. – 2019. – № 4–2. – С. 43–50.
- Мельник, Э.В. Метод обеспечения функционирования мобильных компонентов для систем мониторинга и диагностики на базе распределенного реестра / Э.В. Мельник, М.В. Орда-Жигулина // Известия Тульского государственного университета. Технические науки. – 2023. – Вып. 2. – С. 36–41.
- Разработка распределенной архитектуры поиска в задачах оптимизации / З.В. Нагоев, А.Н. Дуккардт, М.И. Анчеков и др. // Известия Кабардино-Балкарского научного центра РАН. – 2015. – № 1 (63). – С. 16–22.
- Multi-agent Neurocognitive Architecture of an Intelligent Agent Pattern Recognition System / Z. Nagoev, I. Pshenokova, K. Bzhikhatlov et al. // Procedia Computer Science. – 2022, Vol. 213. – P. 504–509.
- Формальная модель мультиагентного поиска оптимального плана поведения интеллектуального агента на основе самоорганизации распределенных нейрокогнитивных архитектур / З.В. Нагоев, И.А. Пшенокова, С.А. Канкулов и др. // Известия Кабардино-Балкарского научного центра РАН. – 2021. – № 3(101). – С. 21–31.
- Иванов, Д.Я. Искусственные нейронные сети в группах микророботов / Д.Я. Иванов, В.Б. Шабанов // Вестник науки и образования. – 2019. – № 20-2 (74). – С. 23–29.
- Косарев, Н.И. Продукционная модель представления знаний в системах поддержки принятия решения / Н.И. Косарев // Вестник Сибирского юридического института ФСКН России. – 2012. – №2(13). – С. 136–140.
- Талипов, Н.Г. Методы построения и оценки нечётко-продукционной модели распределения заданий в системе электронного документооборота Роскомнадзора / Н.Г. Талипов, А.С. Катасёв, А.П. Кирпичников // Вестник Казанского технологического университета. – 2017. – Т. 20, № 2. – С. 100–106.
- Kalyaev, I.A. Multiagent Management of Smart Internet Production / I.A. Kalyaev, A.A. Dyachenko, L.Zh. Usachev, S.G. Kapustyan // Proceedings of 2018 Global Smart Industry Confer-ence (GloSIC). IEEE. – 2018. – P. 1–8.
