Системы автоматизированного кормления (САК)
")
Автор: Владимир Алешин-Вдовенко
Журнал: Фермер. Черноземье @vfermer-chernozemye
Рубрика: Техника
Статья в выпуске: 8 (8), 2017 года.
Бесплатный доступ
Мы переключаемся на рассказ о роботах кормления, уборки и подкормки животных, перемещающихся по высокоопорным монорельсам. Речь пойдет о навесных смесительно-раздаточных кормовагонах-шатлах, способных перемещаться в воздушном пространстве высокопрофильных помещений высотой в 2,5 – 3 и более этажа, построенных в соответствии с новыми возможностями и современными архитектурными проектами. Внутри помещений, где много свежего воздуха, а потому свободно дышится всем живущим и работающим там млекопитающим: как животным, так и обслуживающему персоналу
Короткий адрес: https://sciup.org/170177902
IDR: 170177902
Текст научной статьи Системы автоматизированного кормления (САК)
Системы автоматизированногокормления (САК)
М ы переключаемся на рассказ о роботах кормления, уборки и подкормки животных, перемещающихся по высокоопорным монорельсам. Речь пойдет о навесных смесительно-раздаточных кормовагонах-шатлах, способных перемещаться в воздушном пространстве высокопрофильных помещений высотой в 2,5 – 3 и более этажа, построенных в соответствии с новыми возможностями и современными архитектурными проектами. Внутри помещений, где много свежего воздуха, а потому свободно дышится всем живущим и работающим там млекопитающим: как животным, так и обслуживающему персоналу.
Новые проекты строительства молочно-товарных и мясомолочных ферм (комплексов) характерны использованием современных негорючих теплоизоляционных материалов; компонентов внешних и автономных энергосистем; элементов проводных и беспроводных локальных информационных сетей и их сопряжения с внешними; комплектующих выбранной системы автоматизированного кормления животных, используя при этом широко распространенный блочно-модульный принцип комплектации.
Робототехнические решения с постепенной автономизацией в применении
Hetvin Aramis II – робот-кормовагон для полнорационного кормления под австрийским брендом Hetwin, одна из последних разработок тирольской компании Automation Systems GmbH. Подвесной довольно красивый кормова-гон Aramis II обеспечивает полную автоматизацию процессов взвешивания, разделки силосных блоков, вырезанных из слежавшихся силосных слоев, и непрессованных основных кормов, смешивания и дозирования к ним концентрированных добавок. Он осуществляет адресную доставку кормосмесей до коров или других живот- ных с одновременной уборкой проходов и уменьшением ширины «взлохмаченных» в процессе поедания кормовых лент, пригребаемых бульдозерными отвалами к кормовым заборам (с окнами доступа), отделяющую животных от пищи. Aramis II представляет собой весомый инженерный вклад в развитие систем автоматизированного корм- ления животных.
Два электропривода на верхней штанге тирольского робота кормления (1,1 кВт) получают электроэнергию от специальной передающей шины, проложенной рядом с монорельсом. И приводят в движение колесную пару кормовагона на поддерживающем рельсе.
Объемный бункер (3,5 м3; загрузка для 300 коров)
комплектуется двумя продольными смешивающе-измельчающими шнеками (11/7,5 кВт), разделенные гребенкой из 5-элементных зубчато-противоножевых полотен, а также выгрузными боковыми окнами с заслонками и специальными выходными раструбами. Габариты учитывают ширину прохода между кормовыми заборами и двух параллельных кормовых столов у их подножия. В качестве насадок могут использоваться и хорошо зарекомендовавшие себя в работе короткие откидные ленточные транспортеры под каждым боковым выгрузным окном (1,1 кВт).
Обычно смешивающе-измельчающие шнеки враща- ются, если смотреть на них сверху, друг навстречу другу. Поскольку боковые лопасти с прикрепленными к ним пилами/зубчатыми ножами у шнеков направлены к центру бункера, то при таком вращении шнеки («винты») протаскивают стебли основных (грубых) кормов одновременно к центру и бортам. Одновременно уменьшается длина волокон, за счет своих находящихся в круговом движении пилообразных ножей, и благодаря трем центральным противоножевым полотнам, разрывающим подмятые под шнеки стебли, поскольку шнековые лопа-
Hetwin Aramis II

сти на периферийных боковых участках с особой силой тянут стебли к центру бункера.
В центральной части каждого из двух шнеков, соответствующей ширине выгрузного окна, лопасти буров прерываются, уступая место трем одиночным лопастным элементам с закрепленными на их вершинах стандартными пилами (зубчатыми ножами). При этом главная функция «зубастых» лопастей состоит не столько в продолжении процесса измельчения, сколько в организации выгрузки (выбросе) тщательно подготовленной кормовой смеси. Этому способствует продольно расширяющийся вдоль шнеков крепеж выбрасывающих лопастей и пониженный уровень расположения центрального противоноже-вого полотна, упрощающий доступ биомассы к открытому выгрузному окну, а то и к двум сразу.
Управляющая программа позволяет контролировать формирование усредненной длины волокон для кормления конкретных групп животных. Точная тензометрическая весовая система позволяет смешивать и подавать на кормовой стол небольшой объем кормосмесей, начиная от 50 кг. Робот кормления Aramis II подходит для работы и с молочными коровами, и со скотом, находящимся на откорме.
Hetvin Astor. Мне уже доводилось рассказывать о довольно расточительных в эксплуатации (с т.зр. расходов ГСМ) прицепных роторно-турбинных выдувате-лях соломы на расстояние или, точнее, ширину полосы до 25 м. Одна из основных функций таких распределителей состоит в измельчении и рассеивании измельченной соломы – сечки ровным гигиеническим подстилочным слоем в хлевах и стойлах. Его толщина зависит от возраста животных и наличия/отсутствия на бетонной поверхности матрасов и резиновых ковриков.
Бесшумный робот-«горничный» Astor выполняет все работы с соломой, используя при этом минимум энергии, получаемой от аккумуляторных батарей, заряжаемых во время простоев между кормлениями. Опирается он на многократно испытанную конструкцию бункера, который загружается конвейером с выхода стационарного смесителя-кормораздатчика на кормокухне. Конструкция бункера выполнена в виде продолговатого бокса с донным цепным конвейером с поперечными планками. Он подает солому к двум поперечным, расположенным друг над другом роторам, на которых имеются наборы четко выраженных 4-зубчатых измельчающе-подающих ножевых полотен. Эти выходные роторы подминают, режут и растягивают по всей своей ширине соломенную сечку, экономно, равномерно и мягко выпадающую во время движения «Астора» широкой полосой, толщиной до 5 см.
Запрограммированный робот Astor может в зависимости от времени суток, дня недели или месяца передвигаться по разным маршрутам, выполнять рассеивание материалов с измельченной известью и гибко регулировать суточную дозировку соломенной сечки, идущей на подстилку. Общая масса робота Astor (нетто) – около 250 кг.
Hetwin/Spinder Stallboy – это самоуправляемые само-заряжающиеся роботы-толкатели/уборщики кормовых столов, с использованием в качестве рабочего органа вращающейся «юбки» с оцинкованным покрытием и нижней окантовкой из нержавеющей стали. Под ней скрываются две необслуживаемые аккумуляторные батареи (2 х 105 А·ч.; 24 В) с гелевым электролитом и пара одно-

Hetwin Astor

Hetwin Astor. Подстилка из соломы

Hetwin Stallboy. Модель ранняя

Hetwin Stallboy Light >

Hetwin Stallboy Light

Уборщик Spinder Feed
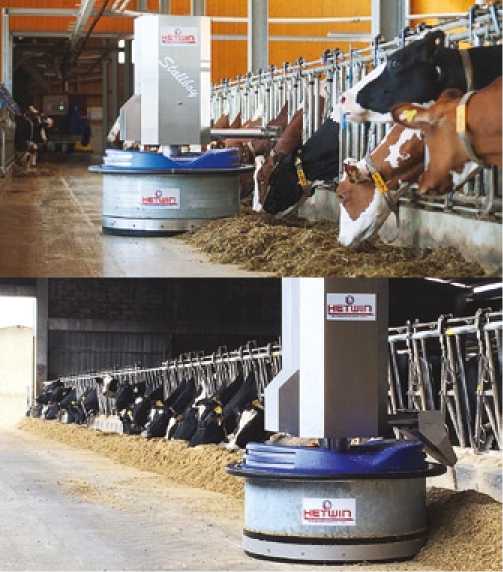
Hetwin Stallboy ON с контейнером для комбикормов и минералов во время сдвига кормовой ленты и дополнительной подкормки
фазных бесщеточных электромоторов для хода и вращения отталкивающей юбки робота-уборщика. За счет чего, собственно, и происходит оттеснение кормовой смеси к кормовому забору (с мин. настройкой в 5 см) и выстраивание ее вдоль кормовых окон ограждения в ровную ленту кормосмеси.
При движении сенсоры «Штальбоя» с помощью микроволн определяют наличие препятствия в полосе движения, и по команде контроллера робот останавливается... Пока он вновь не будет запущен после вмешательства оператора (обслуживающего персонала) нажатием соответствующей кнопки на верхней управляющей панели.
В последнее время появились легкие модели «Шталь-боя»: Hetwin и Spinder Stallboy Light (Ø1,25 м), и утяжеленная модель Hetwin Stallboy ON (Ø1,42/1,7 м). Диаметр 1,7 м здесь означает горизонтальный размер уже двухфункциональной (сдвигающе-подкармливающей) модели, с учетом верхнего предохранительного резинового кольца. Основной визуальной особенностью модели ON является ее комплектация съемным бункером для комбикорма, который крепится сверху на стальной трубчатой штанге перевозочного барабана, соединяющей его также с накопителями (батареями) электрического тока. Барабан необходим для вращения разрыхляющей мешалки внутри пищевого бака (контейнера) и винтового транспортера для вывода ароматной, «заманивающей» животных присыпки в сторону кормового стола.
В качестве насадки на выходное отверстие, транспортирующей комбикорм или минералы трубы, можно устанавливать выходной раструб для организации равномерного самотека гранул концентратов в сторону ленты кор-мосмеси на полу/кормовом столе.
В промежутках между рабочими рейсами или, точнее, кругорейсами вдоль кормовых столов внешнее отверстие трубы винтового конвейера Hetwin Stallboy ON закрывается с помощью заслонки. А сам штальбой подзаряжается от настенной зарядной станции (в укромном уголке МТФ) с помощью двухфазных проводников, несанкционированный контакт персонала с которыми ограничен сверху как трубой транспортера, так и специальным предохранительным кожухом зарядного устройства (поста).

Раздача кормосмеси роботом кормления Rovibec DEC DP и его поднятый уголковый бульдозерный отвал (скрепер)
Штальбой Hetwin ON – это компактный и маневренный помощник оператора (менеджера, владельца) фермы, который ориентирован на средние и небольшие таблицы кормления. Он способен легко преодолевать извилистые проходы, причем в цепочке помещений, продвигаясь в пределах магнитных коридоров, выстраиваемых вмурованными через каждые 2 м в наливные бетонные полы магнитами Ø 4 мм.
Программное обеспечение, реализованное в шталь-бое Hetwin ON с верхним кормовым контейнером, гарантирует, что свежее сырье всегда будет проталкиваться в область кормления коров примерно каждые два часа с шагом 5 см, не менее 10 раз/сутки. Тем более что внешняя полоса кормосмеси, продолжительное время находящаяся вне досягаемости коров, остается свежей и нетронутой слюной животных.
Таким образом, поддерживается более высокое потребление пищи даже коровами низкого ранга в стаде. А постоянный доступ к кормам оказывает положительное влияние на объемы выхода молока и на снижение производственных затрат на молочно-товарной ферме.
Квебекско-верхнеавстрийские марки/бренды «Rovibec Agrisolutions
Проверенные канадские животноводческие решения Rovibec из центрального Квебека распространяются на евроазиатских просторах усилиями компании Schauer Agrotronic GmbH из Верхней Австрии, но уже часто в одном пакете с австрийскими молочно-заготовительными и уборочными технологиями Agrotronic.

Тяжелый подвесной робот кормления Rovibec DEC HDR с передним поперечным ленточным конвейером выдачи кормосмеси.
Rovibec DEC DP/HDR. Подвесной робот кормления (кормовагон) DEC DP/HDR емкостью 1,76–3,54/3,4 м3 позволяет обслуживать до 150/300 животных, находящихся на привязном/беспривязном содержании, при низком энергопотреблении, начиная с 3/5 л.с. (мощность электроприводов – 2,2/3,8 кВт), и без вмешательства человека-оператора. Кормовагоны DEC DP и HDR осуществляют подготовку и распространение TMR-корма(1 в группе при индивидуальном кормлении (программируется до 16 групп) в свободном режиме сваливания смеси на кор-
Ilk
1TMR – Total Mixed Ration (англ.) / Totale Mischration (нем.) / кормление полносмешанными рационами или полнорационной кормовой смесью.

Робот Rovibec DEC SR с высокой подвески распределяет однородным слоем измельченную солому в качестве подстилки

Подвесной робот-вагонетка Rovibec Rov 2000-3000
для присыпки ленты кормосмеси (грубых кормов) комбикормами и минералами для поддержания аппетита у животных
мовой стол или с помощью переднего поперечного ленточного конвейера, расположенного между средствами управления на переднем борту и бункером.
Эти шатлы также имеют возможность использования для раздачи кормов заданных контроллеру кривых кормления (в табличной форме). А кормовагоны DEC DP располагают дополнительными техническими средствами (емкостями) для присыпки грубых кормов на кормовом столе минералами, зернофуражом и концентратами (до 7 видов/состояний).
Кроме того, боковой обшивке кормовагона может быть придан эффект шокера, при подключении к источнику слабого тока, который удерживает животное на безопасном расстоянии от робота. Поскольку до кормовых окон ограждения может минимальное расстояние в 38,1 см или близкое к нему.
Такая дрессировка через короткий промежуток времени обеспечивает подготовку молодых коров – прививает им условный рефлекс осуществлять кормление после прохождения шатла мимо их окон в кормовом заборе. Что предохраняет их от столкновения с навесными транспортными средствами и даже от получения травм.
DEC DP/HDR может также распределять и измельченную солому однородным слоем 5–10 см в качестве подстилки. Кормовагон для этого может подвешиваться к рельсу на высоте до 4 м. И обычно в его бункер внешним транспортером загружается порядка 40 кг разворошенной соломенной сечки.
Rovibec DEC SR 2-3-4. Однако в «подстилочных и заманивающих целях» чаще используют робот DEC SR 2-3-4 c красной кнопкой пуска/останова на заднем борту, подъемным к переднему борту цепным скребковым транспортером в бункере (Д х Ш = 2,03 х 1,2 м). Он может придвигать к внутреннему измельчающему ротору прямоугольные соломенные тюки. После соломенная сечка падает на поперечный ленточный транспортер (Ш = 40,5 см) и сносится им в сторону. Далее под действием гравитации летит с рассевом к земной поверхности, покрывая ее однородным слоем толщиной 5–10 см для коров, бычков или телок. (Роботы DEC SR имеют пищевую комплектацию 304-й конструкции из нержавеющей стали.)
Для сведения, ленточный конвейер у робота SR 2-3-4 располагается или сразу же за щитом управления, либо далее – за дополнительным контейнером для размещения минералов (кормовой соли, извести…), дробленого зерна, концентратов типа рапсового или соевого шрота. Хотя в той отдельной емкости может быть и зернофуражная смесь. Например, при откорме бычков используется смесь в соотношении: 50% кукурузы, 45% ячменя и 5% минеральных элементов. Контейнер для концентратов и прочих «коровьих вкусностей» (до 7 видов компонентов) увеличивает длину кормовагона более чем на полметра (+0,51 м).
DEC SR приспосабливается к проходам всех размеров (шириной > 1,2 м), обеспечивая кормом в автоматическом режиме до 300 животных на свободном выгуле или 150 при стойловом их содержании. При этом он может учитывать кривые питания и различные рецепты распределения, смешивая и раздавая до 6-7 видов подкормки (минералов, зерна и концентратов). При низком энергопотреблении электродвигателя (2,2 кВт), который начинает выдачу крутящего момента, эквивалентную 3 л.с.

Rovibec Rov 2000-3000
Роботы DEC DP, HDR и SR крепятся к рельсу, типоразмер которого зависит от планировавшихся пролетов и нагрузки, с помощью двух адаптеров, располагающихся на расстоянии чуть более 1,8 м один от другого. Каждый адаптер имеет в своем составе по две пары боковых стальных роликов на подшипниках с внешними звездочками, объединенные с помощью боковых цепных передач и соединяющих их нижним валом в целостную жесткую систему взаимозависимости при вращении. И вся эта система соединена цепной передачей с расположенным ниже электромагнитным тормозным блоком, запитанным от аккумуляторных батарей.
Впереди переднего адаптера имеется тяговая пара боковых, заполненных полимером резиновых колес с прямым гидроприводом от двух гидромоторов на тех же колесных осях, приводимых в движение одним гидроконтуром от распределителя автономной гидросистемы шатла. В результате чего ведущие колеса отличаются мягким пуском и остановкой, длительным сроком службы (целостностью) своего кормовагона и окружающей его инфраструктуры. И эта же пара колес контролирует и удерживает вертикальное положение подвесного кор-мовагона, позволяя ему успешно проходить с замедлением склоны направляющих монорельсов в условиях кривизны до 4%.
Впрочем, робот кормления можно оснастить и 4-мя ходовыми по направляющему рельсу колесами (колесной формулой 4 х 4), которые полностью исключат возможные риски опрокидывания, особенно на участках с кривыми поворотами или крутыми склонами (max 8%). Четыре ведущих колеса улучшают сцепление со стальным направляющим рельсом и при низкой температуре (< 8°С) и влажности (> 70%).

Подвесной кормовагон GEA Farm/Mullerup Free Stall Feeder М3000
Методика подбора для реконструированных ферм. Робот DEC DP/HDR, с придонными скребками – толкателями кормовых смесей на полу (кормовом столе) в сторону кормовых ограждений с окнами для их поедания животными, рассчитан для работы в проходах от 2,5 м. Боковые скосы на углах кормовагонов позволяют подстраиваться к коридорам практически любых размеров и их изгибам на старых, не реконструированных фермах. Для выбора приемлемой по ширине модели шатла, способного с требуемым зазором проходить 90-градусные повороты, имеется даже специальная методика подбора.
Возможность использования зауженных кормовых столов позволяет архитекторам агросооружений существенно суживать проходы между стойлами во время проектирования МТФ. А верхний лобовой скос предохраняет кормовыгон от возможности врезаться в низко расположенную стропилу старого сооружения, позволяя тем самым в значительной мере снижать стоимость, как строительства фермы, так и ее реконструкции.
Rovibec DEC HDR – прототип «Пеллона». По своей конструкции Rovibec DEC DP/HDR сильно напоминает однобарабанный подвесной дозирующий робот кормления TMR под брендом Pellon. Или, скорее наоборот, при разработке финского «Пеллона» в темно-синем противокислотно-эмалевом «прикиде» в качестве прототипа был, видимо, использован элегантный от полированной нержавеющей обшивки канадский робот-кормовагон DEC DP моделей 1-2-3-4-45 (1,76/2,12/2,46/2,86/3,54 м3; Д х Ш х В = 3,18 х 1,02-1,68 х 1,91 м), отличающийся повышенной устойчивостью к коррозии и царапинам.
Впрочем, неважно, кто у кого идеи позаимствовал и кто втайне держит подробности о своих конструкциях, справедливо опасаясь банального промышленного шпионажа со стороны честолюбивых конкурирующих производителей. Важно то, что нынешний Pellon ближе по конструкции к поздней модели Rovibec DEC HDR, а у пяти моделей DEC DP с боков просматривается крепеж сдвоенных барабанов для смешивания поперечными двунаправленными шнеками (от борта к борту). При этом выгрузка кормосмеси осуществляет через боковые клапаны, расположенные по центру нижних частей бортов, закругленных по днищу к носу и корме робота. То есть высыпается кормосмесь из пространства, не охватываемое окружностями смесительных камер (а между ними). И это происходит под вертикальным воздействием (сверху вниз) вращения смесительных шнеков (Ø30 см), переходящего в этой части объема сдвоенного смесительного бункера в скорый выгружающий травяную или силосную смесь эффект.
Rovibec ROV. И наконец, нельзя не упомянуть также о компактных подвесных вагонетках – «податчиках зерна» серии ROV от той же компании Rovibec, которые предназначены для подсыпки по краю сдвинутой в сторону ограждения (освеженной) ленты кормос-меси без вмешательства оператора подготовленного к употреблению зерна, комбикормов, пищевых добавок, минералов и прочих концентрированных фуражных продуктов. При этом контроллер настраивается на автоматическую раздачу продуктов из внутренних емкостей (до 8) с помощью узколенточного и шнековых транспортеров лопастного и винтового/бесстерж-невого типов. !►

Подвесной кормовагон GEA Farm/Mullerup Free Stall Feeder М3000

Подвесной кормораздатчик GEA Farm/Mullerup Westfalia Smart Feeder M 300 Plus D для раздачи концентратов
Податчик зерна ROV отличается низким энергопотреблением, работает либо с двумя 12-вольтовыми батареями, либо в электрифицированном варианте – со съемом тока с внешних проводников. А перемещаясь по монорельсовой дороге, приспосабливается к проходам всех существующих размеров. (Для сведения, коровы проводят «в дежурном режиме» возле кормовых ограждений около 4 часов в сутки.)
Вестфальско-датские марки/бренды «GEA Farm – Mullerup»
Продолговатая форма роботов кормления от GEA Farm, подвешиваемых на монорельсе под потолком фермы с помощью двух моторных тележек, свидетельствует об использовании продольных смесительных шнеков горизонтального типа. Это в результате позволяет в тесноте узких проходов заполнять кормовыми лентами края двухметрового кормового стола. А технологическая последовательность работы с кормами у них следующая: взвешивание, смешивание и распределение кормосмеси в одну или обе стороны.
Первые два типа кормовагонов – GEA Free Stall Feeder и GEA Mix & Carry Feeder комплектуются тремя типоразмерами бункеров М1600/1,6 м3; М2000/2 м3 или М3000/3 м3 (на выбор) на высокой рамочной подвеске, не мешающей погрузочным операциям. Изначально они рассчитаны на получение кормосмесей со стационарных смесителей MVM 8 (30 м3) посредством цепных конвейеров. Бункеры М1600/2000/3000 тут модульного, то есть наращиваемого типа (с расширением). Их действия, с плавной подачей и низким уровнем шума, легко программируются на панели оператора.
GEA Farm (Mullerup) Free Stall / Mix & Carry Feeder. Основное отличие GEA Free Stall Feeder от GEA Mix & Carry Feeder заключается в разной электронной «начинке», которая позволяет обеспечивать оптимальную подачу для 15 различных групп кормления… Но с тремя (у Free Stall Feeder) и 30-ю (у Mix & Carry Feeder) кормовыми ингредиентами для каждой группы, двигаясь во время сеансов кормления медленно и тихо мимо подающего стола соответствующей группы и аккуратно распределяя кормос-месь в индивидуальном порядке на определенных участках перед каждой магнитно пронумерованной коровой в отдельности. И по указанию оператора подсыпая молочным «рекордсменкам» перед кормовым ограждением весомые кормовые «кучки-добавки».
Для определения заслуг каждой коровы перед хозяином используется быстрая и точная идентификация каждой коровы с помощью мультиридера, считывающим инфор- мацию с магнитных чипов (интегральных микросхем) – номера ушных бирок или номера животных с транс-пордеров на ошейниках. И быстрая выборка ее статуса (группы кормления, состояния здоровья…), а также показателей каждой (привеса, удоя и пр.) из базы данных системы управления стадом.
GEA Farm (Mullerup) Mix Feeder Pro. Третий тип робота кормления – трехкубовый кормораздатчик Mix Feeder Pro также относится к системе кормления полнорационными кормосмесями (TMR). Но он предназначен для обслуживания менее механизированных ферм с невысокими потолками и низким расположением направляющего рельса. В состав Mix Feeder Pro входит 3 энергоэффективных модели (под индексами Plus, XL и XL AC), выбор которых зависит от места применения и размера обслуживаемого стада: до 240 коров, 15 групп, при использовании до 9 основных кормовых компонентов.
Энергоэффективность семейства Mix Feeder Pro основывается на использовании автономных электродвигателей с питанием от периодически заряжаемых необслуживаемых батарей с желеобразным электролитом.
Хотя первые (пилотные) реализации модификации GEA Mix Feeder Plus опирались на последовательную загрузку трех компонентов грубых кормов (с трех транспортеров MM8/GM 17), а также комбикормов, концентратов и других добавок из силосных башен и специальных контейнеров, для последующего приготовления однородных кормосмесей в пути до кормовых столов. При этом мощность, затрачиваемая на вращение пар режуще-смешивающих шнеков под нагрузкой, оказалась, на мой взгляд, явно «неприподъемной» для аккумуляторной батареи разумных габаритов и соответствующей им энергетической емкости (~9,2 кВт). Тут без токосъемников и внешней энергосети явно не обойтись.
В то же время, двум ходовым двигателям для работы – передвижения по направляющему рельсу с гладкой поверхностью достаточно «аккумуляторних сил» в объеме всего лишь 350 Вт (2 х 175 Вт). Поскольку коэффициент трения качения (тормозящий качение) колеса из закаленной стали по рельсу из не менее закаленной стали весьма минимален.
Для удобства загрузки бункеры GEA Mix Feeder Plus (XL; XL AC) конструктивно рассчитаны на существенный боковой наклон (±6°). А итогом применения данного типа навесных кормораздатчиков, отличающихся более ярко выраженными ножевыми бурами у смесительных шнеков, является существенное сокращение времени на приготовление и раздачу кормовых смесей, с минимизацией энергетических затрат за счет применения высокоэффективных стационарных миксеров.
Специалисты GEA Farm Technologies работают и над технической реализацией подсыпки комбикормов и концентратов поверх края ленты выложенной ранее кормосмеси, продляющий аппетит животных. А в качестве прототипов им на этом пути служат такие датские модели «ковшей» для комбикормов и концентратов, как Mullerup Smart Feeder M600 и Westfalia Smart Feeder M300 Plus D.
Владимир Алешин-Вдовенко, к.т.н. f
СПЕЦИАЛИЗИРОВАННАЯ РЕМОНТНАЯ
ОРГАНИЗАЦИЯ РЕАЛИЗУЕТ
КАПИТАЛЬНО ВОССТАНОВЛЕННЫЕ
ТРАКТОРЫ К-700


|
Модель |
К-700 |
|||
|
Комплектация |
Стандарт |
Профи |
||
|
Цена*, руб. |
3 450 000 |
3 650 000 |
3 850 000 |
4 050 000 |
|
Двигатель (новый) |
ЯМЗ-238 НД-3 |
ЯМЗ-238 НД-5 |
ЯМЗ-238 НД-3 |
ЯМЗ-238 НД-5 |
|
КПП Ведущие мосты |
После капитального восстановительного ремонта с использованием новых комплектующих |
|||
|
Рулевое управление (новое) |
Гидроусилитель |
Насос-дозатор РМ-2000 |
||
|
Основная гидросистема (новая) |
Насос НШ-100/ распределитель Р-160 |
Насос BOSCH/распреде-литель BOSCH с регулятором потока |
||
|
Система воздушного питания (новая) |
Стандартная |
Фильтр Т-330 |
||
|
Система выпуска (новая) |
Стандартная |
Нового образца (К-744) |
||
|
Кондиционер (новый) |
• |
• |
• |
• |
|
Отопитель кабины (новый) |
• |
• |
• |
• |
|
Новая отделка и оснащение кабины |
• |
• |
• |
• |
|
Новые диски и шины R32 |
• |
• |
• |
• |
|
Восстановление лакокрасочного покрытия всех кузовных деталей |
• |
• |
• |
• |
* - цена может отличаться от заявленной, если покупатель закажет укомплектовать выбранный трактор другими узлами и агрегатами.

БЫЛО
СТАЛО

Возможно оборудование капитально восстановленных тракторов двигателем ЯМЗ-7511 (400 л.с.) и двигателями Тутаевского моторного завода 8481.10 (350-420 л.с.), а также другими узлами трансмиссии и гидросистемы.

По вопросам приобретения тракторов К-700 после восстановительного капитального ремонта обращайтесь по телефонам:
(8442) 52-10-12, 8-905-395-28-88 E-mail: simonov06@mail.ru
