Собственные и вынужденные колебания деформируемых тел с учётом демпфирования и напряжённого состояния, инициируемого пьезоэлементами

Автор: Каменских А.О.
Журнал: Вычислительная механика сплошных сред @journal-icmm
Статья в выпуске: 4 т.18, 2025 года.
Бесплатный доступ
Широкое использование тонкостенных конструкций, подверженных нежелательным динамическим явлениям, требует разработки эффективных методов управления их колебательными характеристиками для предотвращения резонанса. Перспективным решением проблемы служит применение интеллектуальных материалов (в частности, пьезокерамики), позволяющих реализовать пассивные, активные и гибридные системы демпфирования. В данной работе методом конечных элементов изучаются собственные и установившиеся вынужденные колебания кусочно-однородных электроупругих и электровязкоупругих тел. Особенностью исследования является учёт предварительного напряжённо-деформированного состояния, которое создаётся вследствие обратного пьезоэффекта во встроенном пьезоэлементе при подаче на него постоянного электрического напряжения. На основе принципа возможных перемещений сформулирована математическая постановка задачи, описывающая это состояние через дополнительную (геометрическую) жёсткость. Кроме этого, постановка включает механизмы вязкого (путем введения комплексного модуля упругости) и релеевского (в виде интегральных членов в уравнении движения) демпфирования. На примере пластины со встроенным пьезоэлементом изучено влияние управляющего напряжения и типа демпфирования на комплексные собственные частоты и амплитудно-частотные характеристики. Установлено, что как вязкое, так и релеевское демпфирование слабо сказываются на сдвиге резонансных частот, вызванном предварительным нагружением. Результаты решения задачи о вынужденных установившихся колебаниях позволяют количественно оценить уменьшение амплитуды при инициировании пьезоэлементом напряжённо-деформированного состояния в пластине, испытывающей внешнее воздействие с частотой, соответствующее её резонансу при отсутствии нагружения. Продемонстрировано воздействие предварительного напряжённо-деформированного состояния на амплитудно-частотную характеристику пластины с близким расположением собственных частот при разных значениях электрического потенциала на пьезоэлементе.
Собственные и вынужденные колебания, электровязкоупругость, предварительное напряжённое состояние, вязкое и релеевское демпфирование, метод конечных элементов
Короткий адрес: https://sciup.org/143185432
IDR: 143185432 | УДК: 534 | DOI: 10.7242/1999-6691/2025.18.4.29
Natural and forced vibrations of solid bodies with account for damping and prestressed state induced by piezoelectric elements
The widespread use of thin-walled structures subjected to undesirable dynamic phenomena necessitates the development of effective methods for controlling their vibrational characteristics to prevent resonance. A promising approach to solving this problem is the application of smart materials, particularly, piezoelectric elements, enabling the implementation of passive, active, and hybrid damping systems. This work investigates the natural and forced vibrations of piecewise-homogeneous electro-elastic and electro-viscoelastic bodies using the finite element method. A distinctive feature of the study is the consideration of the prestressed and predeformed state caused by an embedded piezoelectric element as a result of the reverse piezoelectric effect due to DC voltage supply. A mathematical formulation of the problem, interpreting the prestress state in terms of geometric stiffness, and accounting for viscous and Rayleigh damping mechanisms is developed based on the principle of virtual displacements. Using a plate with an embedded piezoelectric element as an example, the influence of the control voltage and the type of damping on the complex natural frequencies and amplitude-frequency responses is studied. It has been established that both viscous and Rayleigh damping have slight effect on the shift of resonant frequencies caused by the prestressed state. The results of solution of the forced vibration problem allow us to quantify a decrease in the vibration amplitude of the plate in the prestressed state caused by the piezoelectric element in the case of external excitation with frequency corresponding to the resonance frequency of the unloaded plate. The results presented demonstrate the influence of the prestressed state on the amplitude-frequency response of a plate with closely spaced natural frequencies at different values of the electric potential on the piezoelectric element.
Текст научной статьи Собственные и вынужденные колебания деформируемых тел с учётом демпфирования и напряжённого состояния, инициируемого пьезоэлементами
Стремление к минимизации массы изделий современной авиакосмической и машиностроительной техники неизбежно приводит к широкому использованию тонкостенных элементов. Однако снижение толщины несущих панелей и обшивки ведёт к критическому уменьшению жёсткости, делая их высокочувствительными к динамическим нагрузкам и способствуя возникновению нежелательных вибраций, потери устойчивости или опасных аэроупругих явлений, в частности, флаттера [1 –3] . В связи с этим разработка методов управления динамическими характеристиками таких конструкций становится ключевой задачей для обеспечения их надёжности и долговечности.
Существующие подходы к подавлению нежелательных вибраций можно разделить на пассивные, активные (адаптивные) и гибридные [4, 5] . Пассивные подходы основываются на рассеянии или преобразовании энергии колебаний без затрат внешней мощности. К ним относятся внедрение в конструкцию виброизолирующих элементов из вязкоупругих материалов и проектная оптимизация — варьирование расположения рёбер жёсткости и схем армирования композитных панелей для изменения спектра собственных частот и ухода от резонансных режимов [6 –8] . Перспективным направлением пассивного демпфирования служит присоединение пьезоэлектрических элементов к пассивным электрическим цепям, состоящим, например, из резистора и катушки индуктивности. В такой конфигурации пьезоэлемент преобразует механическую энергию вибраций в электрическую, которая рассеивается в цепи. Впервые эта идея представлена в работах [9, 10] .
Однако средствами проектирования не всегда удаётся полностью исключить риск возникновения трудно прогнозируемых динамических явлений в процессе эксплуатации, характерный пример описан в [11] — повреждение вентрального киля самолёта F-16, вызванное бафтингом. Для подавления таких непредсказуемых воздействий применяются активные подходы. Они реализуются в виде замкнутых контуров управления, которые в режиме реального времени отслеживают состояние конструкции с помощью сенсоров и алгоритмически определяют необходимую корректирующую реакцию, осуществляемую через актуаторы.
Активные подходы демонстрируют значительный потенциал с точки зрения подавления нежелательных колебаний и служат предметом интенсивных исследований. Они воплощаются в практику разными средствами, среди них выделяются системы на основе пьезоэлементов, которые благодаря прямому и обратному пьезоэффектам могут эффективно выполнять функции как сенсоров, так и актуаторов [12] , в том числе совмещать эти роли [13] . Широкий спектр возможных применений таких систем иллюстрирует обзорная работа [14] , в которой анализируется более четырёхсот публикаций, посвящённых активному подавлению колебаний всевозможных объектов с помощью пьезоэлементов: от приводов жёстких дисков до строительных и космических сооружений.
Одним из способов активного управления динамическими характеристиками тонкостенных конструкций служит создание в них предварительного напряжённо-деформированного состояния (НДС) [8, 15] . Это
Статья опубликована в открытом доступе по лицензии CC BY 4.0
осуществляется, в частности, с помощью пьезоэлектрических актуаторов, которые вследствие обратного пьезоэффекта приводят к образованию в объекте механических напряжений, изменяющих его жёсткость и, следовательно, спектр собственных частот [8] . Детальному исследованию управления динамическими характеристиками с помощью пьезоэлементов посвящено большое количество публикаций, в которых несущими конструкциями являются оболочки [16 –21] или балки [22 –28] . Одной из ранних публикаций, в которой показана эффективность влияния на спектр собственных частот, стала работа [17] , рассматривающая численное моделирование композитной пластины с различными конфигурациями (размером, количеством и расположением) пьезоэлементов. Впоследствии её результаты подтверждены натурным экспериментом [18] на объекте, состоящем из закреплённой с двух противоположных сторон композитной пластины с пьезоэлементами. В общем выводе исследований констатируется результативность выбранной методики активного управления, однако отмечается, что для каждой конструкции оптимальная конфигурация пьезоэлементов уникальна.
В публикациях [16, 29] предпринята попытка обобщить роль некоторых параметров тонкостенных конструкций на результаты активного способа управления с помощью предварительного НДС. Так, в [16] показано, что наиболее заметно спектр сдвигается у оболочки с малым значением кривизны, а увеличение кривизны приводит к значительному уменьшению величины сдвига. Авторы связывают это с повышением жёсткости оболочки. В работе [29] даются рекомендации по выбору оптимального местоположения пьезоактуатора. Как правило, — это зона с максимальной потенциальной энергией деформации при условии, что создаваемое пьезоэлементом возмущение не искажает порядок собственных частот в спектре.
В дальнейших исследованиях фокус применения активного метода смещается на повышение аэроупругой устойчивости балок и оболочек [19, 20, 27, 28, 30] . Показательным примером служит работа [20] , в которой посредством численного моделирования консольной пластины обнаружено, что приложение электрического напряжения к присоединённым пьезоактуаторам увеличивает критическую скорость флаттера почти на 50%.
В большинстве работ предварительное НДС учитывается путём введения дополнительной (геометрической) жёсткости. Данный подход используется и в настоящем исследовании. Следует отметить, что в рассмотренной литературе анализируется влияние механических напряжений, индуцированных пьезоэлементами, либо на собственные частоты колебаний тонкостенных конструкций, либо на их устойчивость к аэродинамической нагрузке. При этом недостаточно изучены роли величины и механизма демпфирования в системе, а также изменения амплитудно-частотных характеристик при вынужденных установившихся колебаниях. Цель настоящей работы — восполнить этот пробел.
-
2. Математическая постановка и численная реализация
Рассматривается задача о собственных и вынужденных гармонических колебаниях кусочно-однородного тела объёмом V = V s + V p , где V s — элемент из материала, проявляющего при колебаниях упругие и вязкие свойства, V p — элемент из упругого пьезоэлектрического материала. На границе элементов V s и V p выполняются условия идеального контакта.
Опишем движение кусочно-однородного тела с учётом демпфирования следующим вариационным уравнением [31] :
У ( ( 5 E ‘ ) T C p E ‘ - ( d E ’ ) T Ee ’ - ( d e ' J T E T s ' — ( 5 e ‘ ) T De ’ ) dV + J ( 5 u ‘ ) T gu ‘ dV +
V p
V
+ / (M T P p U ‘ dV + / ((^ E ‘ ) T C.
V p
V s
'sE ‘) dV + J ( 5 u ‘ ) T p s U ‘ dV = 0
V s
Здесь ε ′ — вектор, содержащий компоненты тензора деформаций; C s — матрица коэффициентов, определяющих при колебаниях упругое и вязкоупругое поведение материала; C p — матрица коэффициентов упругости пьезоэлектрического материала; E , D — матрицы пьезоэлектрических и диэлектрических коэффициентов, вычисленных при постоянных деформациях; e ‘ = —У ф ’ — вектор напряжённости электрического поля, где φ ′ — неизвестный электрический потенциал; µ — матрица коэффициентов, определяющих зависимость демпфирования от вектора скорости; ρ p , ρ s — плотности материалов электроупругого и упругого (вязкоупругого) тела; u ‘ = { x 1 , x 2 , x 3 } T — вектор неизвестных перемещений, где x 1 , x 2 , x 3 — компоненты неизвестных перемещений относительно соответствующих осей системы координат Oxyz ; u ‘ , u ‘ — векторы неизвестных ускорений и скоростей.
В рассматриваемых задачах о колебаниях учитывается предварительное НДС, возникающее при подаче электрического потенциала на поверхности пьезоэлемента S φ и S 0 , которые покрыты тонким токопроводящим слоем (электродированы). Толщина типовых электродов составляет от 1 до 10 мкм и зависит от метода нанесения. При толщине пьезоэлемента порядка 1 мм можно пренебречь электродированными слоями и не учитывать их в численной модели. Электродированные поверхности являются эквипотенциальными. Через них прикладывается напряжение с выходной разностью потенциалов U . В таком случае полагается, что часть границы ( S 0 ) заземлена, а на другой ( S ф ) присутствует потенциал ф 0 = U :
Ф = ф о , x е S ф
Ф = 0 , x е S o .
Для учёта предварительного НДС, вызванного деформацией пьезоэлемента под действием электрической нагрузки (2) , в задачах о собственных и вынужденных колебаниях необходимо вычислить матрицы дополнительной (геометрической) жёсткости. Они вводятся через рассмотрение деформирования тела в рамках конечных деформаций. Для этого неизвестные перемещения представляются в виде суммы перемещений из начальной конфигурации в промежуточную ( u 0 ) и из промежуточной в конечную ( u ):
u ‘ = u 0 + u .
В этом случае компоненты тензора деформаций выражаются в виде суммы линейной и нелинейной частей:
E = { e ll ,e 22 ,e 33 , 2 e 23 , 2 e 13 , 2 e 12 } = E +2 S s ,
_ ‘ [ du l du 2 du 3 f du 2 du3 \ f du l du3 \ f du l
^ in , n , n , I n + n I , 1 n + n I , 1 n +
∂x 1 ∂x 2 ∂x 3 ∂x 3 ∂x 2 ∂x 3 ∂x 1 ∂x 2
‘ f du l du l du l du 2 du 2 du 2 du 3 du 3 du 3 'I s ,n ,n ,n , , , , ,
∂x 1 ∂x 2 ∂x 3 ∂x 1 ∂x 2 ∂x 3 ∂x 1 ∂x 2 ∂x 3
du 2 MT
∂x 1 ,
T
,
где E ‘ — линейная часть деформаций, S ’ — матрица линейных множителей:
|
∂u 1 |
0 |
0 |
∂u 2 |
0 |
0 |
∂u 3 |
0 |
0 |
|
|
dx 1 |
∂x 1 |
∂x 1 |
|||||||
|
0 |
∂u 1 |
0 |
0 |
∂u 2 |
0 |
0 |
∂u 3 |
0 |
|
|
∂x 2 |
∂x 2 |
∂x 2 |
|||||||
|
0 |
0 |
∂u 1 |
0 |
0 |
∂u 2 |
0 |
0 |
∂u 3 |
|
|
S ’ = |
∂x 3 |
∂x 3 |
∂x 3 |
||||||
|
0 |
∂u 1 |
∂u 1 |
0 |
∂u 2 |
∂u 2 |
0 |
∂u 3 |
∂u 2 |
|
|
∂x 3 |
∂x 2 |
∂x 3 |
∂x 2 |
∂x 3 |
∂x 3 |
||||
|
du l |
0 |
∂u 1 |
∂u 2 |
0 |
∂u 2 |
∂u 3 |
0 |
∂u 3 |
|
|
дх з |
∂x 1 |
∂x 3 |
∂x 1 |
∂x 3 |
∂x 1 |
||||
|
∂u 1 |
∂u 1 |
∂u 2 |
∂u 2 |
∂u 3 |
∂u 3 |
||||
|
∂x 2 |
∂x 1 |
0 |
∂x 2 |
∂x 1 |
0 |
∂x 2 |
∂x 1 |
0 |
Неизвестный потенциал представляется аналогично предположению (3) , тогда вектор напряжённости электрического поля запишется в виде:
e ‘ = e o + e , (5)
где e 0 — приращение компонент вектора напряжённости электрического поля из начальной конфигурации в промежуточную, e — приращение компонент вектора напряжённости электрического поля из промежуточной конфигурации в конечную.
После разложения всех компонент уравнения (1) со штрихом ( ) аналогично предположению (3) , подстановки в него деформации в виде (4) и напряжённости электрического поля в виде (5) и отбрасывании членов 2 и 3 порядка малости, перейдём к итоговому выражению для вариационного уравнения движения электроупругого тела с учётом предварительного НДС. Для более краткой записи этого уравнения далее приводится только слагаемые для подобласти из пьезоэлектрического материала. Оставшаяся часть уравнения получается путём замены V p на V s у заключённых в рамку членов, связанных с пьезоэлектрическими и диэлектрическими эффектами:
/ [( d E T C p E + 5 E T C p S o s + 5 s T s T C p _ ■ 5 s T s T C p S o s + 5 s T S 0 s + d s T S O s ^ -
V p
- (d E T Ee + 5 s T S T Ee + 5 s T S O s) - (MtEt e + 5 e T E T S o s) - ( 5 e T De )
dV +
+
J 5 u T gu dV + j
d u T p p u dV = 0 .
V V p
В выражении (6) слагаемые δ s T Σ ε 0 s dV , δ s T Σ s 0 s dV и δ s T Σ e 0 s dV позволяют учесть влияние предварительного НДС на динамическое поведение конструкции. Они получаются при использовании следующих соотношений:
1 i s T S T C pЁO dV = У i s T S o s dV,
V p
V p
J 1 i s T S T C p S o s o dV = y^ s T S o s dV,
V p
V p
У i s T S T Ee o dV = у 5 s T S 0 s dV.
V p
V p
Здесь
S o =
T o =
T ε 0 0 0
T ε 0 0
0 0 T ε 0
, S O =
T s 0 0 0
T s 0 0
T s 0
,
S O =
T e 0 0 0
T e 0 0
T e 0
,
σ 1 ε 1
ε σ 12
ε σ 22
sym
ε σ 13
ε σ 23
ε σ 33
, t o =
σ 1 s 1
s σ 12
s σ 22
sym
s σ 13
s σ 23
s σ 33
,
T O =
σ 1 e 1
e σ 12
e σ 22
sym
e σ 13
e σ 23
e σ 33
.
Компоненты матриц T ε 0 , T s 0 , T e 0
и S 0 находятся по выражениям:
o e = C p E o , O s = 2 C p S o S o , O e
Ee 0 ,
следующим из решения задачи статики о деформировании тела с граничными условиями (2) . Решение задачи о собственных колебаниях представляется в следующем виде:
u(x,t) = u(x)ei“t, ф(x,t)= ф(х)е^, где U(x), ф(х) — собственные формы колебаний; w = wR+iwIm — комплексная собственная круговая частота колебаний, где ωRe — определяет собственную частоту колебаний, а ωIm — связана со скоростью затухания соответствующей моды колебаний; i — мнимая единица.
С учётом (7) вариационное уравнение (6) определяющее собственные колебания примет вид:
У [^ ё т С р ё + i Ё T C p S o s + 5 s T s T c^ + i s T s T c p S o s + i s T S ^ s + i s T S o s ) -
V p
- ^Ё т Ее + i s T S T Ee + i s T ^ o s) - (б е т Е т Ё + i e T E T S o s) - ( i e T De )] dV -
+ iw
У i u T ^u dV
V
ω
У i u T p p U dV
= 0 .
V p
При вынужденных установившихся колебаниях на части поверхности S σ задаются силовые граничные условия P ( x ,t ) = P o ( x ) e - im , а на S u — кинематические граничные условия u ( x ,t ) = u o ( x ) e - i m и решение представляется в виде:
u ( x ,t ) = u ( x ) e -im , ф ( x ,t )= ф ( x ) e -iflt , (9)
где P 0 , u 0 — заданные векторы амплитудных значений сил и перемещений соответственно; Ω — круговая частота гармонического внешнего воздействия.
Подставляя представление решения (9) в (6) и учитывая только кинематические граничные условия, получим следующее уравнение для вынужденных установившихся колебаний:
У [( 5 ё т С р ё + i Ё T C p S o s + i s T S T C p Ё + i s T S T C p S o s + i s T S ^ s + i s T S o s ) -
V p
- ( i Ё T Ee + i s T S T Ee + i s T S o s ) - ( i e T E T Ё + i e T E T S o s ) - ( i e T De )] dV -
+Ш У i u T “U dV - ^ 2 У i u T p p u dV = 0 . V V p
Численная реализация задач (8) и (10) осуществляется методом конечных элементов в программном комплексе ANSYS Mechanical. Дискретизация области пластины и пьезоэлектрического элемента осуществляется с использованием 20-узловых конечных элементов в форме призмы с квадратичной аппроксимацией всех компонент вектора перемещений и электрического потенциала (SOLID186 и SOLID226 соответственно). Размер конечных элементов подобран на основе анализа асимптотической сходимости результатов решения рассматриваемых задач при увеличении числа элементов.
-
3. Численные результаты
Численные результаты, демонстрирующие количественные и качественные закономерности при собственных и вынужденных установившихся колебаниях деформируемых тел при различных механизмах демпфирования и с учётом НДС, инициируемого пьезоэлементами, анализируются на примере квадратной пластины 300 х 300 х 1 мм из дюралюминия Д16Т с пьезоактуатором 50 х 50 х 0.3 мм из керамики ЦТС-19 (Рис. 1) .
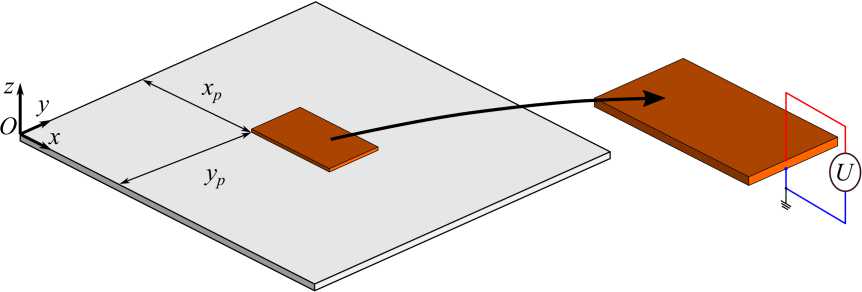
Рис. 1. Общий вид пластины с пьезоэлементом
Использовались следующие механические параметры материала пластины и пьезоэлемента:
-
- пластина — E f s = 68 . 5 ГПа, v s = 0 . 3 , p s = 2714 кг/м 3 ;
-
- пьезоэлемент — c 11 = c 22 = 109 ГПа, c 12 = 61 ГПа, c 13 = c 23 = 54 ГПа, c 33 = 93 ГПа, c 44 = c 55 = c 66 = 24 ГПа, p p = 7500 кг/м 3 , e 31 = e 32 = - 4 . 9 Кл/м 2 , e 33 = 14 . 9 Кл/м 2 , e 15 = e 24 = 10 . 6 Кл/м 2 , £ 11 = £ 22 = 820 £ 0 , £ 33 =840 £ 0 , £ 0 =8 . 85 х 10 -12 Ф/м.
Здесь E 's , v s — действительная часть модуля Юнга и коэффициент Пуассона; c ij , e ij , £ ц — ненулевые компоненты матриц упругости, пьезоэлектрических и диэлектрических коэффициентов; £ 0 — диэлектрическая проницаемость вакуума.
В модели используется два вида демпфирования: вязкое и релеевское. Для задания вязкого демпфирования используется коэффициент ψ , который связан с комплексным представлением модуля Юнга пластины следующим соотношением:
^ = E"/E, где E" — мнимая часть комплексного модуля Юнга пластины.
Демпфирование, зависящее от скорости в уравнениях (8) и (10) , определяется соотношением [32] :
J 5 u T цй dV = а • ^ 5 uT pudV+в • J 5eT CedV, V V V где α и β — коэффициенты релеевского демпфирования.
Согласно работе [29] , для рассматриваемой квадратной пластины положение пьезоэлемента, обеспечивающее максимальное влияние на спектр собственных частот, находится в её центре, то есть при x p = y p = 125 мм.
В таблице приведены первые четыре комплексные частоты собственных колебаниях пластины, с жёстко закреплёнными торцами, при разных значениях электрического потенциала, подаваемого на пьезоэлемент, и при разных значениях параметра ψ , определяющего вязкое демпфирование.
Таблица. Комплексные собственные частоты колебаний
|
U,В |
^ = 0.01 |
^ = 0.03 |
||||
|
f 1 ,Гц |
f 2 = f 3 ,Гц |
f 4 , Гц |
f 1 ,Гц |
f 2 = f 3 ,Гц |
f 4 , Гц |
|
|
0 |
95.25 – 0.48 i |
199.13 – 1.00 i |
299.69 – 1.50 i |
95.26 – 1.43 i |
199.15 – 2.99 i |
299.72 – 4.49 i |
|
1000 |
98.49 – 0.49 i |
198.85 – 0.99 i |
302.56 – 1.51 i |
98.50 – 1.48 i |
198.87 – 2.98 i |
302.59 – 4.54 i |
|
–1000 |
103.27 – 0.52 i |
206.57 – 1.03 i |
301.89 – 1.51 i |
103.28 – 1.55 i |
206.59 – 3.10 i |
301.92 – 4.53 i |
Вынужденные установившиеся колебания рассматриваются при следующих граничных условиях на торцах:
Ux(x,t) = Uy (x,t)=0, Uz (x,t) = uo(x)e-int, x e Su, где u0 — амплитуда перемещений внешнего воздействия.
На рисунке 2 приведены амплитудно-частотные характеристики (АЧХ) перемещений в центре пластины в окрестности первой собственной частоты при разных значениях параметра, определяющего вязкое демпфирование (линия с маркерами ф = 0 . 01 ; линия без маркеров ф = 0 . 03 ), а на рисунке 3 при разных значениях параметров, определяющих релеевское демпфирование (линия с маркерами а = 0 , в = 2 х 10 - 5 ; линия без маркеров а = 0 , в = 6 х 10 - 5 ). Результаты представлены для трёх значений электрического потенциала U на пьезоэлементе (сплошная линия соответствует U = 0 В; пунктирная U = 1000 В; штрихпунктирная U = — 1000 В).
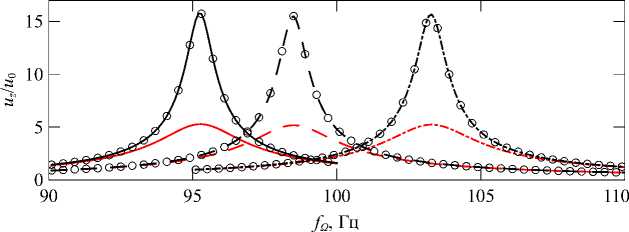
Рис. 2. Зависимость амплитуды перемещений от частоты внешнего воздействия при вязком демпфировании
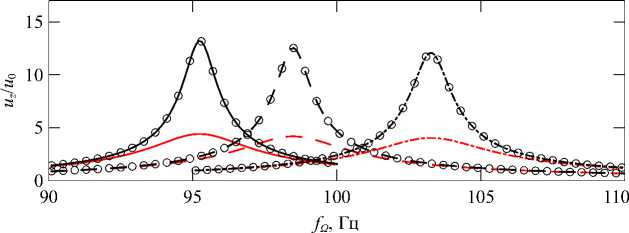
Рис. 3. Зависимость амплитуды перемещений от частоты внешнего воздействия при релеевском демпфировании
Приведённые результаты демонстрируют изменение собственных частот колебаний и резонансных частот вынужденных колебаний при подаче электрического потенциала на пьезоэлемент. Этот механизм может быть использован в практических приложениях для устранения резонансных режимов в заданном интервале частот. Результаты решения задачи о вынужденных установившихся колебаниях позволяют оценить при фиксированной частоте внешних воздействий изменение резонансной амплитуды колебаний при подаче электрического потенциала на пьезоэлемент (Рис. 4) . Величина изменения резонансной амплитуды ∆u z вычислялась по следующей формуле:
u
Ли = ~Wt х100%, uz где uz — резонансная амплитуда колебаний при U = 0, upzt — амплитуда колебаний при U = 0 и частоте внешнего воздействия, соответствующей резонансу при U = 0.
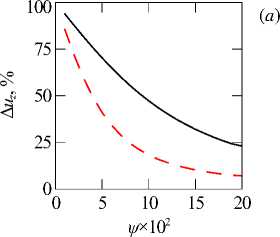
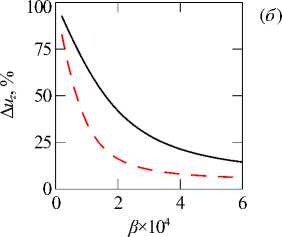
Рис. 4. Изменение амплитуды в зависимости от параметров ψ ( а ) и β ( б ), определяющих демпфирование, при разном значении электрического напряжения U , В: –1000 (сплошная линия), +1000 (пунктирная линия)
Рисунок 4 содержит зависимости изменения амплитуды колебаний при частоте внешнего воздействия, соответствующей первому резонансу невозмущённой пластины, для разных значений электрического потенциала на пьезоэлементе от определяющих демпфирование параметров. Эти результаты демонстрируют, что с увеличением демпфирования изменение амплитуды колебаний уменьшается.
Из анализа результатов, приведённых в таблице и на рисунках 2, 3, следует, что изменение собственных частот колебаний и резонансных частот при вынужденных колебаниях практически не зависит от параметров, определяющих демпфирование.
На рисунке 5 представлены зависимости первой резонансной частоты и соответствующей амплитуды колебаний от величины электрического напряжения U на пьезоэлементе для разных моделей демпфирования и фиксированных коэффициентах ψ и β . Данные результаты позволяют сделать вывод, что характер изменения частот при варьировании потенциала не зависит от модели демпфирования, в то время как поведение амплитуд отличается для вязкого и релеевского демпфирования.
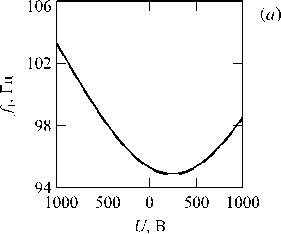
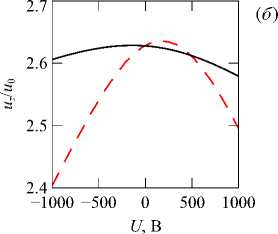
Рис. 5. Зависимости первых резонансных частот ( а ) и амплитуд ( б ) от величины электрического напряжения на пьезоэлементе при значениях параметров: ф = 0.03 (сплошная линия), в = 5 х 10 -5 (пунктирная линия)
Демпфирование колебаний систем с плотным спектром собственных частот имеет особенности, связанные с взаимодействием мод колебаний. Примером такой системы служит закреплённая по двум смежным торцам пластина из дюралюминия Д16Т 300 x 315 x 0.5 мм с пьезоэлементом 50 x 50 x 0.3 мм из керамики ЦТС-19, расположенным на расстоянии x p = 245 мм, y p = 125 мм. Для такой пластины вторая и третья собственные частоты колебаний располагаются достаточно близко друг к другу: f 2 =32 . 85 Гц и f 3 = 35 . 67 Гц. В системе присутствует вязкое демпфирование при ф = 0 . 01 . Рассматриваются вынужденные колебания при следующих граничных условиях:
U x ( x ,t )= U y ( x ,t ) = 0 , U z ( x ,t ) = u o ( x ) e - i nt , x e S | x = 0 , y =0 .
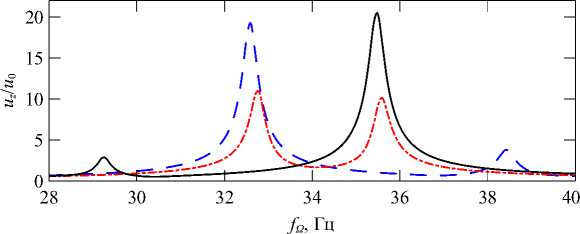
Рис. 6. Амплитудно-частотные характеристики для максимальных перемещений при разном уровне электрического напряжения U, В на пьезоэлементе: 0 (сплошная линия), –480 ( штрихпунктирная линия), –800 (пунктирная линия)
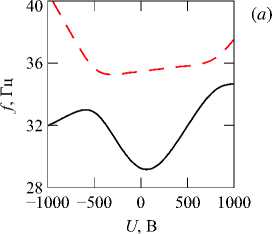
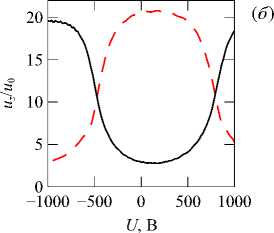
Рис. 7. Зависимости второй (сплошная линия) и третьей (пунктирная линия) резонансных частот ( а ) и амплитуд ( б ) от величины электрического напряжения на пьезоэлементе
Рисунок 6 содержит АЧХ максимальных перемещений, которые демонстрируют изменение резонансных амплитуд второй и третьей моды колебаний при разном значении электрического напряжения. При этом напряжению U = - 480 В отвечает вариант с равными значениями резонансных амплитуд. На рисунке 7 приведены более наглядные зависимости резонансных амплитуд и частот от разности потенциалов на пьезоэлементе. Полученный результат может быть полезен как вариант с минимальными значениями резонансных амплитуд в заданном диапазоне частот внешнего воздействия.
-
4. Выводы
Приведена математическая постановка задачи о собственных и вынужденных установившихся колебаниях трёхмерных деформируемых тел из упругих или вязкоупругих материалов со встроенными пьезоэлементами, на электродированные поверхности которых подано электрическое напряжение. В представленной постановке учитывается варьирование параметров, определяющих вязкое ( ψ ) и релеевское ( β ) демпфирование, предварительное НДС, обусловленное обратным пьезоэффектом ( U ).
На основе метода конечных элементов получены численные результаты для пластины со встроенным пьезоэлементом при собственных и вынужденных колебаниях. Проведённый анализ показывает преимущество постановки задачи о вынужденных установившихся колебаниях перед задачей о собственных колебаниях. Данный подход позволяет не только количественно оценить сдвиг частотного спектра для ухода от резонанса, но и получить величину изменения амплитуды колебаний при частоте внешнего воздействия, соответствующей собственной частоте ненагруженной пластины. Установлено, что снижение амплитуды обратно пропорционально степени демпфирования. В частности, для рассматриваемой пластины при частоте внешнего воздействия, соответствующей первому резонансу, и коэффициенте вязкого демпфирования 0.01 амплитуда уменьшается на 93%, а при коэффициенте 0.2 — на 23%.
Исследовано влияние предварительного НДС, создаваемого пьезоэлементом, на АЧХ, в том числе в случае близости собственных частот. На примере пластин продемонстрировано, что изменение значения электрического потенциала по-разному сказывается на количественных и качественных характеристиках близких частот, и при уменьшении амплитуды одной резонансной частоты амплитуда другой растёт. Также показана возможность получения АЧХ с одинаковыми значениями амплитуды на близких резонансных частотах.
Работа выполнена в рамках государственного задания, регистрационный номер темы 124020700047-3.
