Социоонтологический мультиагентный нейрокогнитивный метод роботизированного контроля регламента процессов в рабочей зоне торгового предприятия

Автор: Анчков М.И., Бжихатлов К.Ч., Макоева Д.Г., Нагоев З.В., Нагоева О.В., Пшенокова И.А.
Рубрика: Математика
Статья в выпуске: 4 т.16, 2024 года.
Бесплатный доступ
Рассмотрена научная проблема организации роботизированного контроля нарушений регламентов процессов в рабочей области торгового предприятия. Исследуется возможность применения интеллектуального агента на основе мультиагентной нейрокогнитивной архитектуры при проектировании системы управления поведением автономного робота-ритейлера. Описан оригинальный социоонтологический метод синтеза стратегий управления поведением автономных роботов в составе человеко-машинного коллектива при решении задач автоматизации рабочих процессов торгового предприятия. Приведены результаты вычислительных экспериментов и сравнения эмпирических и социоонтологических мультиагентных нейрокогнитивных методов идентификации и онтологизации нарушений регламента процессов рабочей среды торгового зала гипермаркета с использованием автономного мобильного робота-ритейлера.
Искусственный интеллект, робототехника, мобильныйавтономный робот, мультиагентные системы, нейрокогнитивные архитектуры
Короткий адрес: https://sciup.org/147246006
IDR: 147246006 | УДК: 004.89 | DOI: 10.14529/mmph240401
Socio-ontological multi-agent neurocognitive method of robotic control of process regulations in the working area of a retail enterprise
The paper considers the scientific problem of organizing robotic control of violations of process regulations in the working area of a retail enterprise. It investigates the possibility of using an intelligent agent based on a multi-agent neurocognitive architecture in designing a behavior control system for an autonomous retail robot. It also describes an original socio-ontological method for synthesizing behavior control strategies for autonomous robots as part of a human-machine team when solving problems of automating work processes in a retail enterprise. The paper presents the results of computational experiments and comparisons of empirical and socio-ontological multi-agent neurocognitive methods for identifying and ontologizing violations of the working environment processes of a hyper-market sales area using an autonomous mobile retail robot.
Текст научной статьи Социоонтологический мультиагентный нейрокогнитивный метод роботизированного контроля регламента процессов в рабочей зоне торгового предприятия
Номенклатура видов товаров, представленных в торговом зале и на складе современного гипермаркета, может составлять десятки тысяч позиций. Соответственно, совокупное количество наличных единиц каждого из этих видов может достигать сотен тысяч. С учетом высокой динамики ассортимента товаров, глобального характера торговых сетей, активно вводящих в оборот локальные продукты, общее количество видов товаров в базах данных сети гипермаркетов может достигать миллионов позиций, а количество наличных единиц товаров, соответственно, - десятков миллионов единиц.
Как правило, для каждого гипермаркета действует свой внутренний регламент, который определяет порядок и особенности организации процессов движения товара от момента поступления на склад до выноса покупателем, который его приобрел. Нарушения регламента рабочих процессов ведут к значительным материальным и имиджевым потерям, однако, учитывая массовость, эпизодичность, неопределенность, частичную наблюдаемость процессов, организация строгого выполнения этого регламента представляется задачей, трудно выполнимой без применения специальных средств автоматизации, что и определяет актуальность темы настоящего исследования.
В данной работе для решения задачи обеспечения регламента процессов в гипермаркете применена система автоматизации на основе мобильного автономного робота (робот-ритейлер ) под управлением системы искусственного интеллекта, построенной на основе т. н. мультиагент-ной нейрокогнитивной архитектуры [1]. В контексте этой задачи робот-ритейлер должен заменить в работе несколько сотрудников торгового зала, выполняя функции расстановки товара, мониторинга его оборота и анализа состояния торгового зала.
С этой целью необходимо было решить ряд нетривиальных задач искусственного интеллекта и принятия решений, таких как задача онтологизации роботом рабочей среды, управления его ориентацией и навигацией, организации естественно-языкового (диалогового) управления поведением робота, задача идентификации проблем (нарушений регламента) и построения их решений (онтологизация проблем). Синтез интеллектуальной системы управления автономного робота, способной к эффективному решению всех этих подзадач, осложняется условиями реальной среды, помимо вышеперечисленных трудностей принятия решений включающих в себя еще и стохастичность, неопределенность, неструктурированность, динамичность, активность и другие. Поэтому в качестве системы управления робота-ритейлера была выбрана мультиагентная нейро-когнитивная архитектура, представляющая собой один из формальных аппаратов разработки систем универсального искусственного интеллекта .
Система управления поведением сложного мобильного робота в условиях реальной среды, в принципе, всегда представляет собой разновидность когнитивной архитектуры, так как необходимо обеспечивать согласованную работу многих подсистем робота: сенсорной, эффекторной, ориентации и навигации, функционального назначения, энергообеспечения и др. [2-4].
В обзорных работах [5-7] дан анализ современного состояния концептуальных и формальных подходов к разработке и реализации систем универсального искусственного интеллекта и управляющих когнитивных архитектур.
Подробное описание мультиагентных нейрокогнитивных архитектур и их применение в качестве формальной основы интеллектуальных систем управления поведением автономных мобильных роботов приводится в [1, 8, 9].
Пусть в момент дискретного времени тс в здании гипермаркета (на всех складах и во всех торговых залах) находится n c товаров g j вида t i , общее количество которых в базе знаний сети гипермаркетов равно значению t max , из которых в данном гипермаркете в момент времени тс представлено t ^a позиций. Каждый из видов товаров t i характеризуется потребительскими свойствами, выраженными параметрами p k ( потребительские параметры товара ), а каждая единица g j этого товара еще и описывается параметрами s j ( ситуативные параметры единицы товара ), определяющими текущий статус, положение и историю эволюций (оформление, перемещение, динамика цен, сроков годности и т. п.) данной единицы товара в течение всего времени ее пребывания в гипермаркете - от момента разгрузки на складе до момента, когда она покидает здание вместе с покупателем, либо в связи с другими причинами.
Единица товара и ее эволюции в гипермаркете полностью описываются вектором парамет- ров:
gj (pl,Р2 >->Pkimax ,Sjcb,Sj^ +1,Sj^ .2’^’Sjce, )’ Sjc ^siC ’s2c ’”•’shjmaxc где Sjc - кортеж значений параметров sj в момент времени тс, т b - время прибытия (разгрузки) единицы товара на склад, т e - время выбытия единицы товара из торгового зала, ce ce
А т ь = т e — т ь - общее время пребывания единицы товара в гипермаркете.
Эволюции единицы товара gi во время ее пребывания в гипермаркете Ат^ могут осуще ствляться в связи с течением времени τ , изменением условий ее хранения (пребывания) на складе и в торговом зале, описывающихся частью параметров slj , либо - в связи с действиями eq
Syc ь , выполняемыми с этой единицей товара сотрудниками гипермаркета ax , либо - с дейст-axqc q виями d'j qb , выполняемыми покупателями b , либо - с действиями br , выполняемыми робо-byqc q y rz тами-ритейлерами r .
Предполагается, что в гипермаркете развернута система автоматизации торговли, включающая в себя мультиагентную группировку роботов-ритейлеров: R z ( r 1 ,r2, . ,r max ) , множество стационарных средств наблюдения: V z ( v 1 ,v 2, . , v max ) , средства обеспечения каналов сетевого взаимодействия всех устройств в составе системы между собой, терминалов и приложений доступа пользователей, программных модулей децентрализованной системы управления товарооборотом гипермаркета, распределенной базы знаний, вычислительных машин, серверов, центров обработки и хранения данных, стационарных пунктов подготовки и обмена аккумуляторов роботов-ритейлеров.
На рис. 1 приведено изображение автономного мобильного торгового робота (робот-ритейлер), являющегося частью такого комплекса. Данный робот представляет собой опытный образец, разработанный в федеральном научном центре «Кабардино-
Балкарский научный центра РАН».
Робот-ритейлер снабжен сенсорной подсистемой, состоящей из анализаторов потоков данных с двух видеокамер, нескольких микрофонов, десятков ультразвуковых и инфракрасных дальномеров, небольшого лидара, нескольких десятков тензорных датчиков и датчиков изгиба, установленных на двух
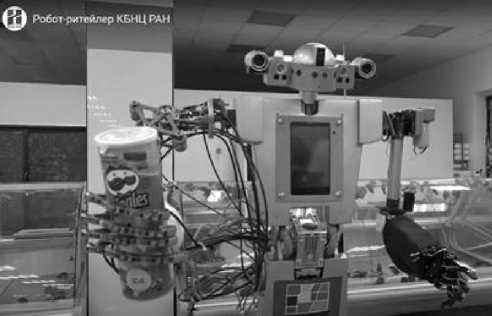
Рис. 1. Автономный мобильный торговый робот
многозвенных антропоморфных манипуляторах с несколькими десятками степеней свободы каждый. Эффекторную подсистему робота дополняют колесные движители, громкоговорители и дисплей.
Система управления роботом представляет собой интеллектуального программного агента Хо , формализованного на основе мультиагентной нейрокогнитивной архитектуры [10]. В этом обозначении верхний индекс Д указывает на уровень вложенности интеллектуального программного агента ( ранг ), что необходимо, так как управляющая мультиагентная нейрокогнитив-ная архитектура рекурсивная и сама состоит из агентов нижнего ранга - т. н. агентов-нейронов ( агнейронов ).
Примем что для каждого товара g i работниками гипермаркета в неявном виде определена оптимальная траектория пребывания в гипермаркете:
i * ic e * pic* *
g Jf ( P 1 fcb , P 2 fcb ,
•••’
р ice * <* * <* *
P f i max fc b , S fc b , S Jfc b + 1
’•••’’
S i * P Jc e * = pJ * pJ * pJ *
dJfc e ) , lfcb ( Pfc b , Pffc b + 1, Pkfc b + 2,
•••’
p j * e ) kfc
где pi*ь+х — оптимальное значение свойства р1^*ь+х товара gi на шаге дискретного времени cb + x .
Будем считать, что в силу различных обстоятельств (действия персонала, покупателей, физико-климатические условия, режимы энергопотребления, интенсивность оборота товаров и т. п.) у товара g i складывается некоторая фактическая траектория пребывания в гипермаркете:
i [ p ic p ic p ic о І о І о І
•’ S*e I ’ Jfc* , )
gJf I Ifcb , P2 fcb . f max fcb , Sjfcb, Sjfcb +1, jj i c kfcb
e
i i i
. f ’ f + 1’ f + 2’
• ’ P
i kfc
e
в общем случае, отличная от оптимальной траектории g if , такая, что отличия можно охарактеризовать с помощью глобальной функции рассогласования :
к i max e у max e
E(gf, gf ) = Y Z Z .(pf, pf) + Y z Z ^j, Sf ) , k=1 c=cb h=1 c=cb s (p fc , Pijfc ) =
o, p f e [ p f
1, p kfc £ [ p f
- A p f ; p f +A p f 2] , - A pf; P fc + A p fc 2] ,
S ( shfc , shfc ) =
0, s hfc G [ s hfc A s hfc 1 ; s hfc + A s hfc 1 ] ,
' 1, s f £ [ s f -A s hfc 1 ; s f +A s if 1 ],
ү g[0;1],y е[0Д], где £(Pf, pf ) , S(shfc, sf) — локальные функции рассогласования, Apf, Asf - смещения гра ниц диапазонов рассогласования значений соответствующих параметров, ү, ү2 — взвешивающие коэффициенты.
Задача обеспечения выполнения регламента процессов в торговом зале гипермаркета с помощью автономного мобильного робота-ритейлера сводится к синтезу такого поведения этого робота, которое обеспечивало бы минимизацию общей глобальной функции рассогласования :
у max j max
E----- e---e > min , E = z Z j ( g j , g if ), A 1 e [0 ; 1] ,
™°cb ^oc i = 1 j = 1
uc c где sob - множество планов действий (вариантов поведения) интеллектуального агента Х^ , управляющего роботом R^ , Qoc - множество всех планов действий этого агента, Aj - взвешивающие коэффициенты.
Структурно-функциональная схема минимального агента мультиагентной нейрокогнитивной архитектуры, управляющего синтезом поведения робота-ритейлера, приведена на рис. 2.
Рис. 3. Трехмерная визуализация мультиагентной нейрокогнитивной архитектуры агента
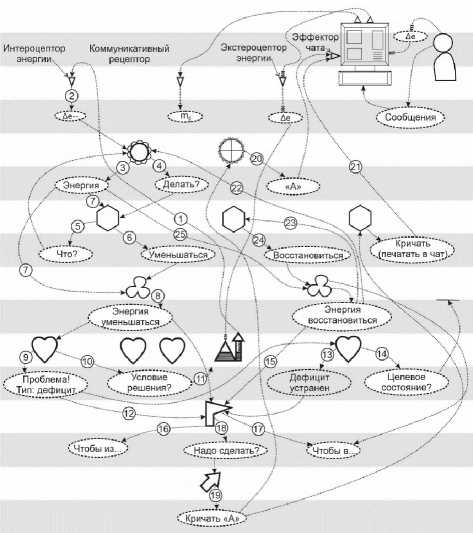
Рис. 2. Структурно-функциональная схема начальной нейрокогнитивной архитектуры интеллектуального агента
Трехмерная визуализация мультиагентной нейрокогнитивной архитектуры агента, построенная с помощью программы виртуального прототипирования интеллектуальных нейро-когнитивных агентов, разработанной в Кабардино-Балкарском научном центре РАН, представлена на рис. 3.
Мультиагентная нейрокогнитивная архи- тектура представляет собой универсальный формализм для разработки интеллектуальных агентов, способных к автономному обнаружению (идентификации) проблем универсального спектра и синтезу их решений (онтологизации) на основе использования т. н. н-отображений, представ'
ляющих собой т. н. мультиагентные функции , задающие отображения между множествами состояний агентов-нейронов, расположенных в функциональных узлах когнитивной архитектуры [1]. Такие узлы, отвечающие за распознавание входных сигналов, формирование состояний на их основе, построение оценки этих состояний, синтез и выбор оптимальных целей и планов действий, показаны на рис. 3 в виде отдельных уровней трехмерной визуализации имитационной модели.
Последовательное прохождение сигналов через каскад н-отображений, имитирующих ситуативно-детерминированный рост и деградацию аксо-дендрональных связей (т. н. алгоритм онтонейроморфогенеза ) между имитационными моделями нейронов, находящихся в этих когнитивных узлах, формирует пространство альтернативных планов действий и внутреннее представление критериев выбора оптимального плана в соответствии с решаемой оптимизационной задачей. Концепция и алгоритм онтонейроморфогенеза описаны в [1, 11], мультиагентные функции определены в [12].
На рис. 2 агенты-нейроны разных типов, находящиеся в функциональных узлах различных уровней последовательного конвейера когнитивной архитектуры, представлены различными двумерными пиктограммами, а на рис. 3 соответствующие им имитационные модели агентов-нейронов показаны трехмерными моделями различной формы.
Содержательный смысл мультиагентного метода идентификации состоит в обмене сообщениями между агентами-нейронами с целью обнаружения по входным данным с устройств сенсорной подсистемы робота состояний нарушения регламента. Для этого интеллектуальная система управления организует выполнение роботом-ритейлером процесса перманентной онтологиза-ции процессов в рабочей среде торгового зала гипермаркета.
Задача автономного построения онтологий процессов в рабочей среде гипермаркета состоит в том, чтобы породить и накопить в распределенной базе знаний Γq знания обо всех потребительских свойствах и эволюциях всех единиц всех видов товаров, которые пребывают в гипермаркете: max max
-
V i , V j , V k , V h , У с , V x , V y , V z : :[ fkhcxyz еГ q = J tf + IJ Y d ,
z = 1 d = 1
где γzq – бортовая база знаний робота-ритейлера r2 , а γq – одна из стационарных баз знаний в составе системы автоматизации торговли гипермаркета.
Интеллектуальный агент, используя систему ориентации и навигации мобильного робота-ритейлера, организует регулярный обход торгового зала и фиксацию всех текущих изменений. Методы идентификации и онтологизации процессов рабочей области и фактов нарушения регламента организации этих процессов основаны на использовании единого мультиагентного нейро-когнитивного метода синтеза исследовательского поведения интеллектуального агента в реальной среде.
Для того чтобы дать общее представление о мультиагентном нейрокогнитивном методе, далее приведем его фрагмент, предварительно разъяснив, что в применяемом в нем формальном описании н-отображения аргументы в скобках обозначают сообщения, отправляемые нейронами из предыдущего функционального узла когнитивной архитектуры, а результат отображения, приведенный слева от знака равенства, – сообщения, отправляемые нейронами текущего когнитивного узла, нижние индексы указывают на множество нейронов – отправителей входных сообщений, а верхние индексы – на множество нейронов – отправителей выходных сообщений:
К ijk l \ К ijk / \ К ijk\ ijk1 1RA ijk1 ijk1 1RO ijk1 ijk1 1RV ijk ijk1 ijk1
YRA = H К % ( RO ) , RO = H К ijkA ( YRA ) , YRV = H К % , К1 RA ( YRO , YRA
1RO 1RA1
ijk К ijk ijk
Y E 2 = H d ( Y j ) , rj 1 = H j ( Y j2 ) ■ Y C 8 = H К ( Y E 2 ) • Y E 2 = H j ( Y 8 ) ,
Y ijk 9
_ у К 9N / yijk 2 \ yijk2 _ т_тК jE / yijk 9 \ yijk 8 _ ^Csc I yijk 9 \ yijk 9 _ гтК jN / yijk 8 \
= H К *( YE ) • YE = H К І^( YN ), YC = H К І^( YN ) • YN = H К ijkc (YC ),
үіjk 7 _ U7B ТВ ( үУк 8 \ үУк 8 _ uC8C ( үУ7 7 \ үУк 6 _ VijG 6 G ( үУ7 7 \ үУк 7 _ fljk 7 b ( үі,6 6 I
YB = H к ik ( YC ), YC = H к jk( YB ), YG = H к ук( YB ), YB = H к |( YG)
ijk ijkijk
Y Gk 6 = h J ( Y E 2 ) , Y E 2 = H J ( Y G 6 ) • Y E 2 = н у ( y E 2 ) ■
2E 6G2
ijkijk
Y 1 = H j ( Y Ek 2 ) • Y j 3 = H ( y 1 ) • Yj 1 = H J ( Yj 3 ) •
R 2EV R R3
Y j 1 = H к ' (үр 3 и Y ijk 11 Y j 6 = H к iG j2 , Y ijk ,
E к js j ( S RV ) G j . j ( E RV )
к jk ик і>к
-
YM 4 и Y 1 = HJ 1 ( Yj 6 ) • Yj 6 = H X j ( Y 3 и Y V 1 ) •
-
R к 6 G ' ' к 3 S ик vV ' R 7
Y1jk 3 _ Kjs I y!/k 6\ yijk 6 _ Kr^c I уУк 3\ уУк 6 _ гтк6 е / үУк 3 үУ4 4 үУк lj
Y S = H к jk ( Y G ) • Y G = H к jk ( Y S ) • Y G = H к jk , к *.к . ( Y S • Y M • Y rV ) ’
1 R
Y1jk 5 _ rfjk jp Iүук 6 \ yijk 6 _ Y j^ / yijk 5 \ yijk 6 _ ң-jGjG I yijk 5 yijk 4 yijk 1 \
Yp = H к jk ( Y G ) • Y G = H к ik ( Yp ) , Y G = H к^.к ^к«\ ( Yp • Y M • Y rV ) ’
1 R
ү>jk 7 _ rrK 7 B / yijk 6 yijk 4 yijk 1 A yijk 8 _ ^jk iC j yijk 7 \ yijk 9 _ ^j 9 f / yijk 8 \
B H к ljk G . к ljk M . к ijk ( Y G • M • Y RV ) • Y C H к jk B ( BB ) • Y N H к ., ( Y C ) ■
1 R
На основании этого общего мультиагентного нейрокогнитивного метода для решения поставленной задачи были разработаны два специальных метода идентификации проблем и онто-логизации решений - эмпирический и социоонтологический .
В качестве проблем рассматривались любые обнаруженные роботом-ритейлером в процессе построения онтологий процессов в рабочей среде гипермаркета отклонения от эталонного состояния базы знаний Γq , порождающие ненулевые значения глобальных функций рассогласования Е .
Эмпирический метод основан на самостоятельном мониторинге процессов роботом-ритейлером без участия персонала торгового зала. В этом варианте робот-ритейлер должен был самостоятельно идентифицировать все проблемы и находить их решения. Вычислительные эксперименты проводились для решения задачи обнаружения и устранения пробелов в выкладке товара, образующихся в результате того, что покупатели забирают товары с прилавков и стеллажей. Проблема считалась идентифицированной, если роботу удавалось обнаружить такой пробел для конкретного товара в соотношении с конкретным местом расположения этого товара на стеллаже, зафиксированном в планограмме торгового зала, хранящейся в базе знаний интеллектуального агента.
Если пара «товар - место» идентифицировалась в списке пробелов впервые, то такое событие учитывалось как дебют проблемы, и робот приступал к ее онтологизации - синтезу метода ее решения. Решение состояло в построении маршрутов движения к месту хранения товара на складе и обратно к данному месту на данном стеллаже.
Второй подход к онтологизации и идентификации проблем состоял в применении диалогового управления при использовании информации, необходимой для решения обнаруженных проблем, получаемой от персонала торгового зала гипермаркета с использованием диалоговой подсистемы для коммуникации на основе подмножества естественного языка, ограниченного феноменологией предметной области процессов рабочей среды торгового зала и склада гипермаркета.
Методы и алгоритмы обучения интеллектуальных агентов освоению и применению элементов естественного языка на основе мультиагентных нейрокогнитивных архитектур подробно изложены в [13].
Так как полученные мультиагентные методы идентификации и онтологизации проблем, связанных с нарушением регламента процессов в рабочей области гипермаркета, построены с использованием знаний, полученных от социального окружения - персонала торгового зала, мы использовали для их обозначения термин «социоонтологические».
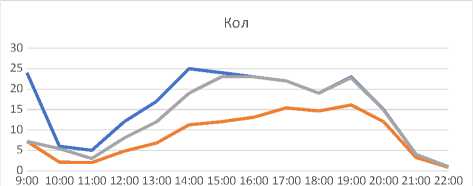
На рис. 4 приведены результаты выполнения мультиагентного нейрокогнитивного эмпирического метода идентификации проблем. Фактическое нарушение планограммы (поток проблем) фиксировалось параллельно сотрудниками торгового зала гипермаркета. На графике отражены значения потока проблем и фактического количества проблем, идентифицируемых двумя методами, в течение дневной смены работы гипермаркета. Время в часах отложено по оси абсцисс.
Кол
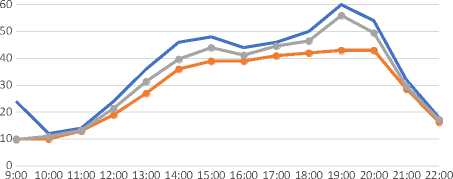
Поток проблем
Эмпирическая идентификация проблем
Социоонтологическая идентификация проблем
Рис. 4. График интенсивности идентификации роботом-ритейлером проблем с помощью эмпирического и социоонтологического методов
Дебюты проблем
Эмпирическая онтологизация
Социоонтологическая онтологизация
Рис. 5. График интенсивности онтологизации роботом-ритейлером проблем с помощью эмпирического и социоонтологического методов
На рис. 5 приведены результаты выполнения мультиагентного нейрокогнитивного метода онтологизации проблем.
Как следует из приведенных рисунков, социоонтологический метод превосходит эмпирический по эффективности. Такой результат объясняется тем, что скорость онтологизации проблем при его применении возрастает, так как в случае применения социоонтологического метода часть решений интеллектуальный агент получает в готовом виде без необходимости самостоятельно синтезировать их, что обязательно требуется в случае использования эмпирического метода.
Таким образом, в результате выполнения данного исследования разработаны основные принципы, методы автономной идентификации и онтологизации нарушений регламента процессов в рабочей области торгового зала гипермаркета на основе синтеза поведения мобильного робота-ритейлера с управляющим интеллектуальным агентом на базе мультиагентной нейрокогни-тивной архитектуры.
Разработаны и реализованы эмпирические и социоонтологические нейрокогнитивные методы. Вычислительные эксперименты, проведенные в торговом зале реального гипермаркета, показали преимущество социоонтологического метода в эффективности, проявляющееся в его способности (в отличие от эмпирического метода) улучшать линейный характер зависимости интенсивности результатов идентификации и онтологизации от интенсивности регистрируемого потока проблем.
В заключение необходимо отметить, что перспективы развития бытовых и сельскохозяйственных приложений многоагентной автономной робототехники в нашей стране связаны прежде всего с научно-технической кооперацией, конструктивным обменом идей явно недостаточного пока количества коллективов, ведущих исследования и разработки в этой области [14–19]. Авторы выражают искреннюю признательность профессору Р.В. Мещерякову за многолетние плодотворные усилия по организации такой кооперации практически между всеми ведущими профильными российскими коллективами, значительный личный вклад в развитие и творческий обмен идеями в области «мягких» методов интеллектуального группового управления мобильными роботами, часть из которых составили концептуальную основу настоящей работы, и сердечно поздравляют его с замечательным юбилеем!
Работа выполнена при финансовой поддержке РНФ (грант № 22-19-00787).
-
1. Нагоев З.В. Интеллектика, или Мышление в живых и искусственных системах / З.В. Нагоев. – Нальчик: Издательство КБНЦ РАН, 2013. – 232 с.
-
2. Рассел С . Искусственный интеллект: современный подход (AIMA-2) / С . Рассел. – Вильямс, 2019. – 1408 с.
-
3. Мещеряков, Р.В. Постановка задачи гетерогенного группового взаимодействия роботов при решении задач умного сада / Р.В. Мещеряков, А.С. Широков // Вестник ЮУрГУ. Серия «Математика. Механика. Физика». – 2024. – Том 16, № 2. – С. 41–49.
-
4. Ронжин, А.Л. Математические модели и средства многомодального взаимодействия с робототехническими и киберфизическими системами / А.Л. Ронжин, М.М. Бизин, С.В. Соленый // Математические методы в технике и технологиях – ММТТ. – 2016 – № 8(90). – С. 107–111.
-
5. Duch, W. Cognitive Architectures: Where do we go from here? / W. Duch, R.J. Oentaryo, M. Pasquier // Proc. 2008 conference on Artificial General Intelligence 2008: Proceedings of the First AGI Conference. – 2008. – P. 122–136.
-
6. Goertzel, B. Artificial General Intelligence: Concept, State of the Art, and Future Prospects / B. Goertzel // Journal of Artificial General Intelligence. – 2014. – Vol. 5, Iss. 1. – P. 1–46.
-
7. A World Survey of Artificial Brain Projects, Part II: Biologically Inspired Cognitive Architectures / B. Goertzel, R. Lian, I. Arel et al. // Neurocomputing. – 2010. – Vol. 74, Iss. 1–3. – P. 30–49.
-
8. Автономный синтез пространственных онтологий в системе принятия решений мобильного робота на основе самоорганизации мультиагентной нейрокогнитивной архитектуры / З.В. Нагоев, К.Ч. Бжихатлов, И.А. Пшенокова и др. // Известия Кабардино-Балкарского научногоцентра РАН. – 2020 – № 6 (98). – С. 68–79.
-
9. The Symbol Grounding Problem in the System of General Artificial Intelligence Based on MultiAgent Neurocognitive Architecture / Z. Nagoev, O. Nagoeva, M. Anchokov et al. // Cognitive Systems Research. – 2023. – no. 79. – P. 71–84.
-
10. Learning Algorithm for an Intelligent Decision Making System Based on Multi-Agent Neu-rocognitive Architectures / Z. Nagoev, I. Pshenokova, O. Nagoeva, Z. Sundukov // Cognitive Systems Research. – 2021. – Т. 66. – С. 82–88.
-
11. Нагоев, З.В. Онтонейроморфогенетическое моделирование / Нагоев З.В. // Известия Кабардино-Балкарского научного центра РАН. – 2013. – № 4(54). – С. 46–56.
-
12. Нагоев, З.В. Мультиагентные экзистенциальные отображения и функции / З.В. Нагоев // Известия Кабардино-Балкарского научного центра РАН. – 2013. – № 4(54). – С. 63–71.
-
13. Нагоев, З.В. Обоснование символов и мультиагентные нейрокогнитивные модели семантики естественного языка / З.В. Нагоев, О.В. Нагоева // Нальчик: Изд-во КБНЦ РАН, 2022. – 150 с.
-
14. Эффективное функционирование смешанной неоднородной команды в коллаборативной робототехнической системе / Р.Р. Галин, А.А. Широкий, Е.А. Магид и др. // Информатика и автоматизация. – 2021. – № 6 (20). – C. 1224–1253.
-
15. Мещеряков, Р.В. Интеллектуальные робототехнические системы // Датчики и системы. – 2024. – № 2 (274). – С. 12–17.
-
16. Мещеряков, Р.В. Постановка задачи гетерогенного группового взаимодействия роботов при решении задач умного сада / Р.В. Мещеряков, А.С. Широков // Вестник Южно-Уральского государственного университета. Серия «Математика. Механика. Физика». – 2024. – Т. 16. № 2. – С. 41–49.
-
17. Моделирование задач транспортировки грузов в беспилотной авиационной транспортной системе / А.А. Захарова, В.П. Кутахов, Р.В. Мещеряков и др. // Авиакосмическое приборостроение. – 2023. – № 3. – С. 3–15.
-
18. Galin, R. Simple Task Allocation Algorithm in a Collaborative Robotic System. Frontiers in Robotics and Electromechanics / R. Galin, R. Meshcheryakov, M. Mamchenko // Smart Innovation, Systems and Technologies. – 2023. – no. 329. – P. 433–447.
-
19. Evaluation of EEG Data for Zonal Affiliation of Brain Waves by Leads in a Robot Control Task / D. Wolf, Y. Turovsky, A. Iskhakova, R. Meshcheryakov // In: Ronzhin, A., Sadigov, A., Meshcheryakov, R. (eds) Interactive Collaborative Robotics. ICR 2023. Lecture Notes in Computer Science. – 2023. – Vol. 14214. – pp. 103–115.
Поступила в редакцию 2 сентября 2024 г.
Анчёков Мурат Инусович – научный сотрудник лаборатории «Молекулярная селекция и биотехнология», Кабардино-Балкарский научный центр РАН, г. Нальчик, Российская Федерация, e-mail: , ORCID iD:
Бжихатлов Кантемир Чамалович – кандидат физико-математических наук, заведующий лабораторией «Нейрокогнитивные автономные интеллектуальные системы», КабардиноБалкарский научный центр РАН, г. Нальчик, Российская Федерация, e-mail: , ORCID iD:
Макоева Дана Гисовна – кандидат филологических наук, заведующий лабораторией «Компьютерная лингвистика», Институт информатики и проблем регионального управления – филиал Кабардино-Балкарского научного центра РАН, г. Нальчик, Российская Федерация, e-mail: , ORCID iD:
Нагоев Залимхан Вячеславович – кандидат технических наук, генеральный директор Кабардино-Балкарского научного центра РАН, г. Нальчик, Российская Федерация, e-mail: , ORCID iD:
Нагоева Ольга Владимировна – научный сотрудник отдела «Мультиагентные системы», Институт информатики и проблем регионального управления – филиал Кабардино-Балкарского научного центра РАН, г. Нальчик, Российская Федерация, e-mail: , ORCID iD:
Пшенокова Инна Ауесовна – кандидат физико-математических наук, ведущий научный сотрудник лаборатории «Нейрокогнитивные автономные интеллектуальные системы», КабардиноБалкарский научный центр РАН, г. Нальчик, Российская Федерация, e-mail: , ORCID iD:
Bulletin of the South Ural State University Series “Mathematics. Mechanics. Physics” 2024, vol. 16, no. 4, pp. 5–15
SOCIO-ONTOLOGICAL MULTI-AGENT NEUROCOGNITIVE METHODOF ROBOTIC CONTROL OF PROCESS REGULATIONSIN THE WORKING AREA OF A RETAIL ENTERPRISE
M.I. Anchekov1, K.Ch. Bzhikhatlov1, D.G. Makoeva2, Z.V. Nagoev1, O.V. Nagoeva2,
-
I .A. Pshenokova1
1Kabardino-Balkarian Scientific Center of the RAS, Nalchik , Russian Federation
2Institute of Computer Science and Problems of Regional Management – branch of Kabardino-Balkarian Scientific Center of the RAS, Nalchik , Russian Federation
Received September 2, 2024
Anchekov Murat Inusovich is Staff Scientist, Laboratory “Molecular Selection and Biotechnology”, Kabardino-Balkarian Scientific Center of the Russian Academy of Sciences, Nalchik, Russian Federation, e-mail: , ORCID iD:
Bzhikhatlov Kantemir Chamalovich is Cand. Sc. (Mathematics, Chemistry), Head of the Laboratory “Neurocognitive Autonomous Intelligent Systems” of the Kabardino-Balkarian Scientific Center of the Russian Academy of Sciences, Nalchik, Russian Federation, e-mail: , ORCID iD:
Makoeva Dana Gisovna is Cand. Sc. (Philological), Head of the Laboratory of Computational Linguistics, Institute of Computer Science and Problems of Regional Management – branch of Kabardino-Balkarian Scientific Center of the Russian Academy of Sciences, Nalchik, Russian Federation, e-mail: , ORCID iD:
Nagoev Zalimkhan Vyacheslavovich is Cand. Sc. (Engineering), General Director of the Kabardino-Balkarian Scientific Center of the Russian Academy of Sciences, Nalchik, Russian Federation, e-mail: , ORCID iD:
Nagoeva Olga Vladimirovna is Researcher of the Department of the Multiagent Systems of the Institute of Computer Science and Regional Management Problems – branch of the Kabardino-Balkarian Scietific Center of the Russian Academy of Sciences, Nalchik, Russian Federation, e-mail: , ORCID iD:
Pshenokova Inna Auesovna is Cand. Sc. (Mathematics, Chemistry), Leading Researcher laboratory “Neurocognitive autonomous intelligent systems”, Kabardino-Balkarian Scientific Center of the Russian Academy of Sciences, Nalchik, Russian Federation, e-mail: , ORCID iD:
Вестник ЮУрГУ. Серия «Математика. Механика. Физика»
2024, том 16, № 4, С. 5–15
Список литературы Социоонтологический мультиагентный нейрокогнитивный метод роботизированного контроля регламента процессов в рабочей зоне торгового предприятия
- Нагоев З.В. Интеллектика, или Мышление в живых и искусственных системах / З.В. Наго-ев. - Нальчик: Издательство КБНЦ РАН, 2013. - 232 с.
- Рассел С. Искусственный интеллект: современный подход (AIMA-2) / С. Рассел. - Вильямс, 2019. - 1408 с.
- Мещеряков, Р.В. Постановка задачи гетерогенного группового взаимодействия роботов при решении задач умного сада / Р.В. Мещеряков, А.С. Широков // Вестник ЮУрГУ. Серия «Математика. Механика. Физика». - 2024. - Том 16, № 2. - С. 41-49.
- Ронжин, А.Л. Математические модели и средства многомодального взаимодействия с робототехническими и киберфизическими системами / А.Л. Ронжин, М.М. Бизин, С.В. Соленый // Математические методы в технике и технологиях - ММТТ. - 2016 - № 8(90). - С. 107-111.
- Duch, W. Cognitive Architectures: Where do we go from here? / W. Duch, R.J. Oentaryo, M. Pasquier // Proc. 2008 conference on Artificial General Intelligence 2008: Proceedings of the First AGI Conference. - 2008. - P. 122-136.
- Goertzel, B. Artificial General Intelligence: Concept, State of the Art, and Future Prospects / B. Goertzel // Journal of Artificial General Intelligence. - 2014. - Vol. 5, Iss. 1. - P. 1-46.
- A World Survey of Artificial Brain Projects, Part II: Biologically Inspired Cognitive Architectures / B. Goertzel, R. Lian, I. Arel et al. // Neurocomputing. - 2010. - Vol. 74, Iss. 1-3. - P. 30-49.
- Автономный синтез пространственных онтологий в системе принятия решений мобильного робота на основе самоорганизации мультиагентной нейрокогнитивной архитектуры / З.В. Нагоев, К.Ч. Бжихатлов, И.А. Пшенокова и др. // Известия Кабардино-Балкарского научногоцентра РАН. - 2020 - № 6 (98). - С. 68-79.
- The Symbol Grounding Problem in the System of General Artificial Intelligence Based on MultiAgent Neurocognitive Architecture / Z. Nagoev, O. Nagoeva, M. Anchokov et al. // Cognitive Systems Research. - 2023. - no. 79. - P. 71-84.
- Learning Algorithm for an Intelligent Decision Making System Based on Multi-Agent Neurocognitive Architectures / Z. Nagoev, I. Pshenokova, O. Nagoeva, Z. Sundukov // Cognitive Systems Research. - 2021. - Т. 66. - С. 82-88.
- Нагоев, З.В. Онтонейроморфогенетическое моделирование / Нагоев З.В. // Известия Кабардино-Балкарского научного центра РАН. - 2013. - № 4(54). - С. 46-56.
- Нагоев, З.В. Мультиагентные экзистенциальные отображения и функции / З.В. Нагоев // Известия Кабардино-Балкарского научного центра РАН. - 2013. - № 4(54). - С. 63-71.
- Нагоев, З.В. Обоснование символов и мультиагентные нейрокогнитивные модели семантики естественного языка / З.В. Нагоев, О.В. Нагоева // Нальчик: Изд-во КБНЦ РАН, 2022. -150 с.
- Эффективное функционирование смешанной неоднородной команды в коллаборативной робототехнической системе / Р.Р. Галин, А.А. Широкий, Е.А. Магид и др. // Информатика и автоматизация. - 2021. - № 6 (20). - C. 1224-1253.
- Мещеряков, Р.В. Интеллектуальные робототехнические системы // Датчики и системы. -2024. - № 2 (274). - С. 12-17.
- Мещеряков, Р.В. Постановка задачи гетерогенного группового взаимодействия роботов при решении задач умного сада / Р.В. Мещеряков, А.С. Широков // Вестник Южно-Уральского государственного университета. Серия «Математика. Механика. Физика». - 2024. - Т. 16. № 2. - С. 41-49.
- Моделирование задач транспортировки грузов в беспилотной авиационной транспортной системе / А.А. Захарова, В.П. Кутахов, Р.В. Мещеряков и др. // Авиакосмическое приборостроение. - 2023.- № 3. - С. 3-15.
- Galin, R. Simple Task Allocation Algorithm in a Collaborative Robotic System. Frontiers in Robotics and Electromechanics / R. Galin, R. Meshcheryakov, M. Mamchenko // Smart Innovation, Systems and Technologies. - 2023. - no. 329. - P. 433-447.
- Evaluation of EEG Data for Zonal Affiliation of Brain Waves by Leads in a Robot Control Task / D. Wolf, Y. Turovsky, A. Iskhakova, R. Meshcheryakov // In: Ronzhin, A., Sadigov, A., Meshcheryakov, R. (eds) Interactive Collaborative Robotics. ICR 2023. Lecture Notes in Computer Science. - 2023. - Vol. 14214. - pp. 103-115.
