Совершенствование метрологического обеспечения калибровки гироинклинометров для геофизических исследований нефтегазовых скважин

Автор: Цветков Г.А., Балуева Н.Ю., Вяткин О.И., Крюков С.А.
Журнал: Вестник Пермского университета. Геология @geology-vestnik-psu
Рубрика: Геофизика, геофизические методы поисков полезных ископаемых
Статья в выпуске: 2 (15), 2012 года.
Бесплатный доступ
Рассматривается проблема создания автоматизированной управляемой прецизионной установки пространственной ориентации гироинклинометров, в которой в качестве чувствительных элементов используются инерциальные элементы (акселерометры, датчики углов, датчики моментов, гировертикаль, интеграторы).
Гироинклинометр, ориентация
Короткий адрес: https://sciup.org/147200816
IDR: 147200816 | УДК: 550.832
Improvement of metrological support of gyroinclinometre calibration for geophysical research of oil and gas wells
The problem concerns an automated fine adjustment development of spatial orientation of gyroinclinometres where inertial elements are used as responsive components (accelerometres, angle-data transmitters, moment detector, vertical gyroscope, integrating units).
Текст научной статьи Совершенствование метрологического обеспечения калибровки гироинклинометров для геофизических исследований нефтегазовых скважин
Рассмотрим влияние отклонения продольной оси инклинометра по курсу на точность показаний приборов. В работе [1] показано, что уход гироскопа от вращения Земли при постоянных величинах – кинетическом моменте гироскопа, географической широте места и коэффициенте передачи системы радиальной коррекции – определяется углом ориентации оси наружной рамки гироскопа относительно географического меридиана, который не определен в случае её произвольной ориентации, поэтому гироскопический инклинометр при испытаниях нужно ориентировать так, чтобы угол был равен нулю.
Гироскопический инклинометр при проведении калибровочных испытаний необходимо ориентировать по магнитному курсу с учетом магнитного склонения. Тогда истинный курс продольной оси гироскопического инклинометра ψ ст опре- делится выражением
ψ ист = ψ маг +Δ µ , (1)
где ψ – магнитный курс, Δ µ – магнитное склонение.
Если продольная ось инклинометра вы- ставлена по магнитному меридиану, то выражение (1) будет иметь вид
ψ ист =Δ µ . (2)
Тогда выражения коэффициентов α и
β уст примут вид
Ct уст
β уст
H Ω cos φ cos Δ µ
- K
H Ω sin φ cos Δ µ
.
K
В этом случае αуст и βуст – постоян- ные величины, которые могут быть скомпенсированы в программе калибровочных
проверок.
Рассмотрим влияние угловой скорости вращения Земли на ориентирование инклинометра в горизонтальной плоскости (горизонтирование).
Инклинометр устанавливается в трехстепенный кардановый подвес, позволяющий поворачивать (ориентировать) его вокруг трех координатных осей.
В установившемся режиме влияние вращения Земли приводит к появлению ошибок [2] стабилизации инклинометра в горизонте вида (5), (6):
HΩ cosφcos X υ(0) = 30 , дY двZ aZ 2 дм1
H Ω sin φ cos X ϕ (0) =- 30
K K K KK д Y дв X a X 3 дм2
Для компенсации этих ошибок введем в каналы связи акселерометра A с дат- чиком момента ДМ и акселерометра A с датчиком момента ДМ интегри- рующие звенья.
Помимо постоянной ошибки от вращения Земли, на работу гироскопического инклинометра оказывают влияние изменения геомагнитного поля, именно
- угла магнитного склонения а^ , вариационные изменения азимута Ла не приводят к изменению проекции полного вектора напряжённости геомагнитного поля (т), т. е. при изменении угла магнитного склонения Ла угол магнитного наклонения не изменяется;
- угла магнитного наклонения 1? на величину Аг? (поворот полного вектора напряжённости поля), при повороте полного вектора напряжённости геомагнитного поля Т вокруг оси на угол магнитного наклонения Аг? его значение зависит от координат проекций полного вектора напряжённости геомагнитного поля.
Проведем моделирование ошибок стабилизации гироскопического инклинометра в горизонте и азимуте.
Для моделирования будем использовать кинематические уравнения по углам, моделирование будем проводить в среде MachCAD.
Зная широту местности и скорость вращения Земли, можем провести интегрирование уравнений с целью получения углов ориентации.
Интегрирование будем проводить методом Рунге–Кутта 4-го порядка с шагом 0,1. Составляющие геомагнитного поля задаем функциями, изменяющимися во времени: ( Tx(t)Jy(t),Tz(t) ). По заданным составляющим найдем угол магнитного склонения и магнитного наклонения. На рис.1 представлен график изменения магнитного склонения.
Как видно из рисунка, угол магнитного склонения изменяется в диапазоне
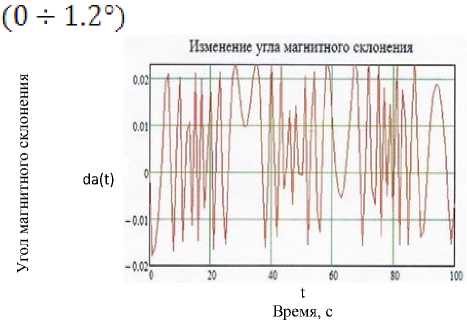
Рис.1. График изменения магнитного склонения
Время, t, c
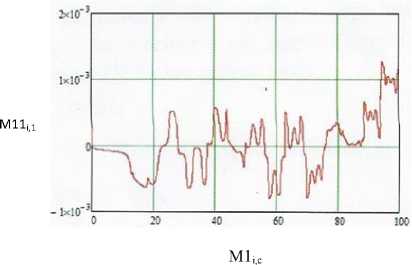
Рис.2. График изменения азимута с учетом вариаций магнитного поля
Из рис. 2 видим, что при учете изменения вариаций магнитного поля ошибки по азимуту уменьшаются. Ошибка по азиму- ту варьируется

в диапазоне
Совершенствование метрологического обеспечения калибровки …
Проведем аналогичное моделирование для стабилизации гироскопического инклинометра в горизонте.
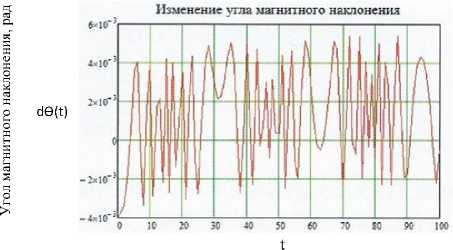
На стабилизацию инклинометра в горизонте оказывает влияние угол магнитного наклонения, представленный на рис. 3.
Время, с
Рис. 3. Изменение угла магнитного наклонения
Из рис. 3 можем определить, что угол магнитного наклонения варьирует в диапазоне . Так как угол магнитного наклонения невелик, он оказывает незначительное влияние на стабилизацию в горизонте.
Список литературы Совершенствование метрологического обеспечения калибровки гироинклинометров для геофизических исследований нефтегазовых скважин
- Цветков Г.А., Балуева Н.Ю., Костицин В.И. Снижение инструментальных погрешностей гироинклинометров за счет улучшения их пространственной ориентации при калибровках//Каротажник: науч.-техн. вестн. Тверь: Изд-во АИС, 2010. Вып.8 (197). С. 111-117
- Цветков Г.А., Балуева Н.Ю. Повышение точности гироинклинометров при калибровке на установках пространственной ориентации//Геология, геофизика и разработка нефтяных и газовых месторождений. 2010. № 12. С. 28-30.
