Совершенствование технологического процесса на тепловых пунктах в системах теплоснабжения

Автор: Бородин Н.К., Кулагин В.А.
Журнал: Журнал Сибирского федерального университета. Серия: Техника и технологии @technologies-sfu
Рубрика: Исследования. Проектирование. Опыт эксплуатации
Статья в выпуске: 3 т.18, 2025 года.
Бесплатный доступ
Одним из направлений энергосбережения в системах централизованного теплоснабжения является совершенствование схем и параметров тепловых сетей, в том числе за счет регулирования технологического процесса на тепловых пунктах. Исследование режимов работы таких тепловых сетей, являющихся связующим звеном между источниками и потребителями теплоты, обеспечивает принятие конкретных проектных и технологических решений, способствующих экономии тепловой и электрической энергии. При эксплуатации систем теплоснабжения часто встречаются ситуации, когда комплексы теплоснабжения, спроектированные с отвечающим современным требованиям оборудованием, демонстрируют низкую надежность и эффективность, связанные с другими технологическими параметрами. Поэтому совершенствование методики выбора новых и повышение эффективности существующих тепловых сетей является актуальной задачей, решение которой позволит повысить качество и надежность работы систем централизованного теплоснабжения в целом, что соответствует одному из стратегических направлений развития России - модернизации энергетики и повышению энергоэффективности систем теплоснабжения. Совершенствование регулирования технологического процесса на тепловых пунктах в системах теплоснабжения возможно за счет применения нейросетевых технологий сходимости.
Тепловые сети, технологический процесс, модернизация энергетики, нейросетевые технологии сходимости
Короткий адрес: https://sciup.org/146283158
IDR: 146283158 | УДК: 697.34
Process improvement at heating stations in heat supply systems
One of the directions of energy saving in district heating systems is the improvement of schemes and parameters of heat networks, including through the regulation of the technological process at heating stations. The study of operating modes of such heat networks, which are a link between heat sources and consumers, provides for the adoption of specific design and technological solutions that contribute to the saving of heat and electricity. In the operation of heat supply systems, there are often situations when heat supply complexes, designed with equipment meeting modern requirements, demonstrate low reliability and efficiency associated with other technological parameters. Therefore, improving the methodology for selecting new and improving the efficiency of existing heat networks is an urgent task, the solution of which will improve the quality and reliability of district heating systems as a whole, which corresponds to one of the strategic directions of Russia’s development - modernization of the energy sector and improving the energy efficiency of heat supply systems. Improvement of technological process regulation at heating stations in heat supply systems is possible due to the application of neural network convergence technologies.
Текст научной статьи Совершенствование технологического процесса на тепловых пунктах в системах теплоснабжения
Повсеместное применение терморегуляторов у отопительных приборов систем отопления привело к переходу от качественного регулирования к качественно-количественному. Это потребовало соответствующего научного, технического и практического подхода в обеспечении эффективной работоспособности системы отопления и системы централизованного теплоснабжения, рассматриваемых как единое целое. Безусловно, существующие теплосети не в полной мере отвечают современным условиям регулирования теплопотребления зданий [1].
Согласно ст. 29 ФЗ-190 «О теплоснабжении» с 1 января 2022 года предусмотрен запрет на использование централизованных открытых систем теплоснабжения. Это требование вызвало бурное обсуждение специалистов энергетической отрасли [2]. Развитие теплоснабжения в нашей стране ориентировано на создание крупных систем централизованного теплоснабжения [3]. Российская система теплоснабжения включает в себя более 50 тыс. локальных систем теплоснабжения. Система теплоснабжения включает в себя источник тепла, систему транспор-– 301 – та теплоносителя (тепловые сети) и системы теплопотребления. Подключение систем теплопо-требления к тепловым сетям осуществляется в тепловых пунктах [4].
Анализ современного состояния АСУТП на базе ПТК на ТЭС показывает следующие основные проблемы управления производственными процессами: недостаточный уровень интеллектуальности процессов регулирования и управления, особенно в части управления производственными процессами на станционном уровне; низкая технико-экономическая эффективность производства энергии из-за отсутствия в прикладном программном обеспечении (ППО) ПТК алгоритмов решения оптимизационных задач как блочного, так и станционного уровней; отсутствие методических подходов и практических рекомендаций по интеграции алгоритмов оптимального управления в ППО ПТК, как при наличии на станциях полномасштабных АСУТП или при их наличии на части оборудования станции [5]. Обусловлено это тем, что в современных АСУТП на базе ПТК заложенный в них потенциал программных и информационных возможностей используется далеко не в полной мере. Очевидно, что это дает большой простор и ресурсы для повышения интеллектуальности АСУ ТП. Ситуация усложняется тем, что, к сожалению, многие разработанные алгоритмы оптимизации не нашли широкого применения ввиду недостаточной их проработанности или отсутствия возможности реализации надлежащего взаимодействия между ПТК и программами, реализующими оптимизационный алгоритм, а также большой доли ручного ввода начальных данных, выполняемого при каждом изменении задания. Следовательно, для внедрения автоматизированного управления режимами работы электростанции необходимо усовершенствовать техническое и информационное обеспечение АСУ ТП, работающих на базе ПТК. В настоящее время в энергетической области большое внимание уделяется изучению и разработке новых средств на базе искусственного интеллекта – интеллектуальных алгоритмов, машинного обучения, нечеткой логики и т.д. Повышение степени автоматизации и интеллектуальности АСУ ТП может значительно улучшить эффективность и качество управления производственными процессами, освободить человека от рутинной деятельности, облегчить работу операторов и вместе с тем значительно снизить вероятность возникновения сбоев в работе по вине человеческого фактора. Одним из таких направлений является разработка и внедрение в ППО ПТК интеллектуальных алгоритмов повышения качества регулирования [5]. По сути, здесь речь идет о классических ПИД-регуляторах, которые настраиваются с использованием нейросетей. При этом нейросеть обучается вручную на одном типовом устройстве. Более того, используются классические ПЛК достаточно в упрощенном варианте.
В работах [6, 7] представлены результаты модернизации и эксплуатации, современных АСУТП на базе ПТК, в том числе:
-
• определение путей повышения эффективности АСУТП и технологических процессов путем разработки и внедрения современных интеллектуальных технологий управления;
-
• оценки технической и экономической целесообразности повышения интеллектуальности АСУТП путем интеграции в прикладное программное обеспечение ПТК оптимизационных задач блочного и особенно станционного уровней;
-
• разработка интеллектуального регулятора, его обучение и варианты его использования при решении практических задач в рамках интеллектуальной АСУТП;
-
• оценки возможности путей и целесообразности интеграции в ППО ПТК интеллектуальных алгоритмов и технологий управления.
В работе [8] рассмотрены вопросы создания на научной основе систем логического управления технологическими процессами и оборудованием, их последовательная увязка по иерархическим уровням и интеграция в единую сеть сбора и обработки данных. В исследовательской части работы рассмотрены: методология и формализованные методы построения систем логического управления технологическими процессами и оборудованием; теоретические основы, средства и методы промышленной технологии создания систем логического управления; теоретические основы, алгоритмы и методы решения прикладных задач при построении систем логического управления; использование методов автоматизированного проектирования для повышения эффективности разработки и модернизации систем логического управления.
Вопросы моделирования, проектирования, разработки, программирования и эксплуатации систем логического управления рассмотрены в работах таких российских и зарубежных ученых, как: Сосонкин В. Л., Соломенцев Ю. М., Мартинов Г. М., Юдицкий С. А., Гаврилов М. А., Грейнер Г. Р., Петров И. В., Аршанский М. М., Титаренко Ю. И., Дубинин В. Н., G. Olsson, G. Piani, Rullan A., E. A. Parr, Frank D. Petruzella, Quan Liang и др.
В нашей стране теорией и практикой релейно-контактных схем автоматизации занимались М. А. Гаврилов, В. М. Копыленко, Г. Р. Грейнер. Большой вклад в теорию синтеза систем управления внес С. А. Юдицкий, который положил основы синтеза систем логического управления для машин-автоматов. С. А. Юдицким также было предложено применение математического аппарата на базе сетей, разработанного К. А. Петри для моделирования систем управления. Построение систем логического управления в рамках машиностроительных производств имеет свои особенности, в частности, это согласованная работа контроллеров в рамках систем ЧПУ, в качестве головного устройства в гибких производственных модулях (ГПМ), ячейках (ГПЯ) и системах (ГПС). Развитием теории проектирования систем логического управления в машиностроении занимались Ю. М. Соломенцев, В. Л. Сосонкин, М. М. Аршанский, а позднее и Г. М. Мартинов. На очередном витке развития технологий Г. Бучем была предложена объектно ориентированная парадигма проектирования и программирования, которая нашла применение и в промышленных системах управления, в том числе и в логическом управлении. Развитием теории построения промышленных систем управления на основе объектно ориентированной парадигмы на западе занимались A. Rullan, E. A. Parr, F. D. Petruzella, в России – Шалыто А. А., Аршанский М. М., Мартинов Г. М. и др. [8]. Однако в данной работе речь идет об отечественной разработке, направленной на импортозамещение, при этом разработка ведется на.NET, что привязывает ее к Windows. Архитектура также вызывает вопросы – известны работы над SoftPLC, степень проработки в которых значительно глубже, архитектура более продуманная, универсальная и лишена недостатков, описываемых в этой работе.
В диссертации [9] сформирована математическая модель, разработаны алгоритмы и вычислительная программа для расчета во времени режимов функционирования сложных систем теплоснабжения с автоматизированными и неавтоматизированными системами тепло-потребления при нерасчетных условиях, а также процессы нестационарной теплопередачи в ограждающих конструкциях зданий, при помощи которых оценивается изменение параметров микроклимата в них. На основе проведенных теоретических исследований [10, 11] изменения тепловых и гидравлических режимов СЦТ и параметров микроклимата в зданиях при меняющихся климатических условиях и нерасчетных параметрах теплоносителя установлена – 303 – зависимость допустимых отклонений температур теплоносителя при различных степенях автоматизации тепловых нагрузок (на примере структуры тепловых нагрузок СЦТ от тепловых источников Омского филиала ОАО «ТГК-11»).
При использовании нейросетевого подхода к решению задач управления на основе прогнозирующих нейросетевых моделей реализованы и исследованы алгоритмы построения прогнозирующих моделей с использованием нейросетевых технологий, а также реализованы алгоритмы настройки параметров нейросетевых регуляторов [12]. Среди всего многообразия нейросетевых структур для решения задач идентификации и управления предлагается использовать многослойные персептронные сети с математической моделью нейрона У. С. Мак-Каллока и У. Питтса. Этот выбор обуславливается возможностью ИНС указанной архитектуры моделировать произвольные нелинейные отображения «вход-выход», что играет существенную роль при использовании нейронных сетей в качестве модельных структур при решении задачи идентификации.
Основополагающими в становлении теории идентификации и ее применения для исследования и адаптивного управления производственными процессами являются труды таких отечественных и зарубежных ученых, как Бахтадзе H. H., Красовский A. A., Райбман Н. С., Растри-гин Л. А., Розенвассер В. В., Ротач В. Я., Рубан А. И., Цыпкин Я. З., Фомин В. Н., Фрадков А. Л., Чадеев В. М., Штейн бергШ.Е., Юсупов P. M., Ядыкин И. Б., Якубович В. А. Eykhoff Р., Graupe D, Kaminskas V., Ljung L., Sage A. P. и др.
Вопросам разработки методологических основ исследования свойств сложных объектов (примерами которых являются объекты теплоэнергетики), важных для создания систем управления, посвящены работы Емельянова C. B., Уткина В. И. (системы с переменной структурой), Острейковского В. А. (вероятностный анализ безопасности АЭС), Соколова Б. В. (управление структурной динамикой сложных объектов), Амбарцумяна A. A., Колесова Ю. Б., Сениченко-ва Ю. Б., Alur R., Maler Z. A., Lygeros J. (гибридные системы) и др. [13]. В результате анализа работ, посвященных вопросам использования технологий искусственного интеллекта при проектировании систем управления, выявлена перспективность создания методологии для разработки методов оптимизации систем управления теплоэнергетическими процессами, а также стратегий управления на базе интеллектуальных технологий.
Развитие методов и средств искусственного интеллекта позволяет применять их к все более широкому кругу проблем вообще и к задачам теории оптимального управления в частности. В первую очередь это относится к задачам, для которых получены только приближенные методы решения либо время решения точными методами достаточно велико. К классу таких задач, несомненно, относится параметрическая оптимизация различного рода автоматических систем по критериям разного вида. Решению задачи параметрической оптимизации с помощью приближенных методов, как для линейных, так и для импульсных автоматических систем, посвящены работы Я. З. Цыпкина [15], Л. А. Растригина [16], К. А. Пупкова и Н. Д. Ергупова [17], Е. П. Стефани [50], В. Я. Ротача [23], Ш. Е. Штейнберга [19], В. П. Плютто [20], В. И. Костюка и Л. А. Широкова [21], Д. П. Кима [22] и др. Вместе с тем современной тенденцией при проектировании и разработке систем автоматического управления является применение не только интегральных, но и иных, нестандартных критериев [23], а также увеличение числа настраиваемых параметров [14].
Большой вклад в применение генетического алгоритма для решения различного рода оптимизационных задач внесли Дж. Холланд [24, 25], К. А. De Jong [26], Д. Голдберг [27], Haupt R. L., Haupt S. E. [28], Г. К. Вороновский, К. В. Махотило, С. Н. Петрашев, С. А. Сергеев [29], Д. Рутковская [30], В. М. Курейчик [31], В. Р. Сабанин, Н. И. Смирнов, А. И. Репин [32–34] и др. [14].
Методология исследования
Устройство ИТП обязательно для каждого здания независимо от наличия ЦТП [35]. Тепловые пункты (ТП) являются важнейшим элементом системы теплоснабжения. Они предназначены для приема теплоносителя от магистральных тепловых сетей, его распределения между потребителями и регулирования параметров теплоносителя (температуры, давления). Основные задачи тепловых пунктов включают в себя:
-
• Регулирование температуры и давления теплоносителя: ТП оснащены теплообменниками, насосами и регулирующей арматурой, которые позволяют поддерживать оптимальные параметры теплоносителя для различных потребителей.
-
• Разделение потоков теплоносителя: ТП позволяют распределять теплоноситель между различными зонами и потребителями, обеспечивая равномерное теплоснабжение.
-
• Поддержание оптимального режима работы системы: ТП обеспечивают стабильную и надежную работу всей системы теплоснабжения, предотвращая перегрузки и аварии.
-
• Мониторинг и контроль параметров системы: современные ТП оснащены средствами автоматизации и контроля, которые позволяют оперативно отслеживать состояние системы и принимать меры для устранения нарушений.
Автоматизация технологических процессов (АТП) и автоматизированные системы управления технологическими процессами (АСУ ТП) играют важную роль в современных системах теплоснабжения. АТП включает в себя применение различных технических средств и программного обеспечения для автоматического контроля и управления технологическими процессами. Автоматизация позволяет значительно повысить эффективность, надежность и безопасность работы систем теплоснабжения. АСУ ТП – это система, обеспечивающая сбор и обработку информации и выработку на основе полученной информации о технологическом процессе управляющих воздействий на объект управления в соответствии с установленными критериями управления [36].
Автоматизация тепловых пунктов в России и за рубежом включает в себя внедрение современных технологий для повышения эффективности и надежности теплоснабжения. ПАО «МОЭК» – московская объединенная энергетическая компания активно внедряет автоматизированные системы управления тепловыми пунктами. В 2022 году МОЭК модернизировала 500 тепловых пунктов, установив системы автоматизации, которые позволили снизить эксплуатационные затраты на 15 % и улучшить контроль за параметрами теплоносителя. ПАО «Т Плюс»: В 2021 году компания внедрила проект по автоматизации тепловых пунктов в Самаре, что позволило снизить потери тепла на 10 % и увеличить надежность теплоснабжения. В рамках проекта были установлены интеллектуальные системы управления, которые позволяют автоматически регулировать температуру и давление теплоносителя.
АО «Теплосеть Санкт-Петербурга»: компания успешно внедрила системы SCADA для управления тепловыми пунктами, что позволило улучшить мониторинг и управление сетью из более чем 5 000 км тепловых трубопроводов. В результате внедрения автоматизации удалось снизить количество аварийных ситуаций на 20 %.
АО «Сибирская генерирующая компания»: в Красноярске был реализован проект по автоматизации тепловых пунктов, включающий установку программируемых логических контроллеров (PLC) и систем дистанционного управления. Это позволило снизить эксплуатационные затраты на 12 % и увеличить энергоэффективность на 8 %.
АО «Теплоэнерго» (Нижний Новгород): компания внедрила автоматизированную систему управления тепловыми пунктами, что позволило оптимизировать режимы работы оборудования и снизить потребление энергии на 10 %.
В плане автоматизации активно работают такие зарубежные компании, как Vattenfall AB (Швеция), Danfoss Group (Дания), Engie (Франция), NRG Energy Inc. (США), Statkraft AS (Норвегия) и др. Использование интеллектуальных систем управления позволило снизить эксплуатационные затраты на 10–20 % и улучшить надежность теплоснабжения. Несмотря на преимущества автоматизации тепловых пунктов, существует множество технических и эксплуатационных проблем, с которыми приходится сталкиваться при внедрении автоматизированных систем управления: нелинейность исполнительных механизмов, их взаимовлияние, сложности пусконаладочных работ, потеря актуальности коэффициентов PID-регулятора и многое другое.
В настоящий момент в Сибирской генерирующей компании утверждена принципиальная схема автоматизации типового ЦТП для открытой (рис. 1) и закрытой (рис. 2) систем теплоснабжения [37].
Красноярская Теплосеть отвечает за эксплуатацию, обслуживание и ремонт тепловых сетей, обеспечивая надежное теплоснабжение для жителей и предприятий города. В зону обслуживания Красноярской тепловой сети также входят тепловые сети ООО «КрасКом» и ООО «КрасТЭК» (рис. 3). Общая протяженность тепловых сетей в однотрубном исполнении, включая муниципальные и бесхозные сети,– 2024,9 км. Всего на предприятии два района котельных, содержащие 9 котельных, и 6 районов тепловой сети, включающие в себя 104 ЦТП/КРП, 26 ПНС [38] (табл. 1 и 2).
Исходя из анализа литературных источников, целью настоящей работы является разработка современной системы АСУ ТП на базе SoftPLC с использованием нейросетевых регуляторов.
Экспериментальные исследования
SoftPLC может работать с любыми модулями ввода-вывода, однако далеко не все модули имеют функционал фильтрации сигналов. Из-за несовершенства работы АЦП модулей, некачественного заземления, помех и других подобных причин получаемый цифровой сигнал требует дополнительной обработки.
В АСУТП применяют ряд простых, но эффективных типовых алгоритмов фильтрации, причем реализация этих алгоритмов может осуществляться как программным, так и аппаратным способом с помощью аналоговых устройств [39]. В ходе экспериментов были опробованы следующие фильтры:
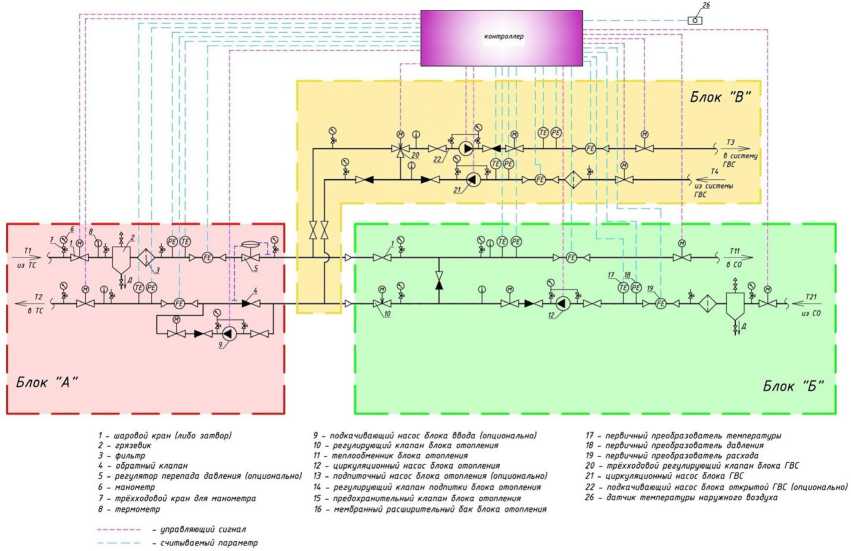
Рис. 1. Принципиальная схема автоматизации типового ЦТП для открытой системы теплоснабжения [37]
Fig. 1. Principal automation scheme of a typical district heating plant for an open heating system [37]
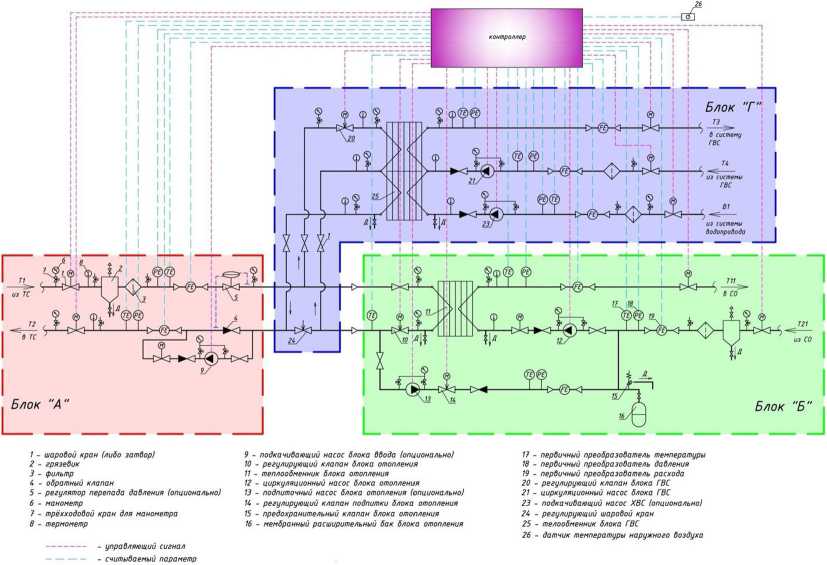
Рис. 2. Принципиальная схема автоматизации типового ЦТП для закрытой системы теплоснабжения [37]
Fig. 2. Circuit diagram of automation of a typical district heating plant for a closed heating system [37]
-
• Экспоненциальный фильтр;
-
• Фильтр скользящего среднего;
-
• Статистический фильтр;
-
• Фильтр Калмана;
-
• Фильтр бегущего среднего арифметического;
-
• Фильтр экспоненциального бегущего среднего;
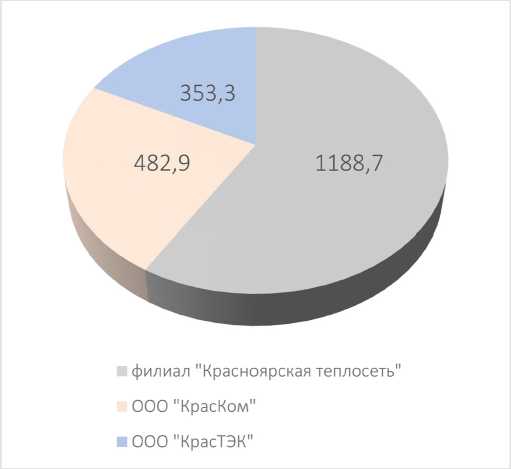
Рис. 3. Протяженность тепловых сетей, км [38]
-
Fig. 3. Length of heat networks, km [38]
Таблица 1
Котельные
Table 1
|
№ п/п |
Адрес |
Тип топлива |
Установленная мощность, Гкал/ч |
Подключенная договорная нагрузка, Гкал/ч |
|
Район котельных №1 |
||||
|
1 |
ул. Ленинградская, 44 |
электр |
172,00 |
находится в резерве |
|
2 |
ул. Крупской, 26 |
электр |
145,00 |
находится в резерве |
|
3 |
ул.Телевизорная, 1 стр 34 |
электр |
2,40 |
в работе |
|
319,40 |
0,00 |
|||
|
Район котельных №2 |
||||
|
1 |
ул. Калинина, 53,д |
уголь |
19,10 |
11,90 |
|
2 |
ул. Тотллина, 24г |
уголь |
88,50 |
96,41 |
|
3 |
ул. Лесная, 239 стр.5 |
уголь |
6,00 |
8,02 |
|
4 |
ул. Лесная, 79 стр.1 |
уголь |
0,99 |
1,28 |
|
5 |
ул. Е.Стасовой, 69а |
уголь |
2,80 |
1,49 |
|
6 |
ул. Норильская, 31 стр 3 |
уголь |
41,10 |
44,81 |
|
158,49 |
163,91 |
|||
|
9 |
477,89 |
163,91 |
||
Таблица 2
Table 2
Тепловые сети, насосные станции, ЦТП/КРП
|
Район тепловых сетей |
Филиал Красноярская Теплосеть |
КрасКом |
КрасТЭК |
ВСЕГО ПО ПРЕДПРИЯТИЮ |
||||
|
ЦТП/КРП, шт |
ПНС, шт |
ЦТП/КРП, шт |
ПНС, шт |
ЦТП/КРП, шт |
ПНС, шт |
ЦТП/КРП, шт |
ПНС, шт |
|
|
РТС-1 |
6 |
6 |
4 |
0 |
0 |
0 |
10 |
6 |
|
РТС-2 |
4 |
6 |
0 |
0 |
8 |
0 |
12 |
6 |
|
РТС-3 |
1 |
4 |
14 |
1 |
0 |
0 |
15 |
5 |
|
РТС-4 |
20 |
2 |
15 |
1 |
3 |
0 |
38 |
3 |
|
РТС-5 |
7 |
5 |
3 |
0 |
0 |
0 |
10 |
5 |
|
РТС-6 |
8 |
1 |
0 |
0 |
11 |
0 |
19 |
1 |
|
ВСЕГО |
46 |
24 |
36 |
2 |
22 |
0 |
104 |
26 |
-
• Медианный фильтр;
-
• Фильтр экстремумов.
А также ряд специфических фильтров, например для фильтрации аудиошумов.
В итоге была выбрана двухступенчатая обработка сигнала, скользящее среднее и фильтр экстремумов. Такой выбор подходит для наших задач, так как он легкий для вычисления и дает незначительный сдвиг по времени, но при этом на выходе получается достойный результат (рис. 4).
В классическом PID-регуляторе используется только три параметра: уставка, обратная связь и управляющий сигнал. Это и является ключевой проблемой, которая при изменении обстоятельств приводит систему в неустойчивое состояние. Регулятор должен учитывать не только обратную связь (сигнал с датчика), но еще и положение всех регулирующих клапанов, признак работы и обороты всех насосов, а также сигналы со всех датчиков на объекте. Так как SoftPLC собственной разработки работает на языке программирования Python, то передача неопределенного числа аргументов в регулятор будет осуществляться через аргументы *args и **kwargs, что является отличным механизмом для решения поставленной задачи.
Если символ * будет использован внутри функции с параметром, произвольное количество позиционных аргументов сгруппируется в один кортеж. В следующем примере args является кортежем параметров, который был создан из нуля или более аргументов, переданных в функцию print_args():
>>> def print_args(*args):
... print('Positional argument tuple:', args)
Если вы вызовете функцию без аргументов, то получите пустой кортеж:
>>> print_args()
Positional argument tuple: ()
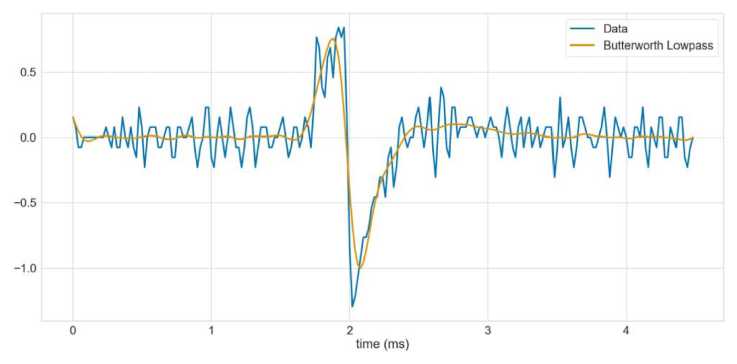
Рис. 4. Фильтрация сигнала
Fig. 4. Signal filtering
Все аргументы, которые вы передадите, будут выведены на экран как кортеж args:
>>> print_args(3, 2, 1, 'wait!', 'uh...')
Positional argument tuple: (3, 2, 1, 'wait!', 'uh...')
Если в вашей функции имеются также обязательные позиционные аргументы, поместите их в начало – *args отправится в конец списка и получит все остальные аргументы:
>>> def print_more(requiredl, required2, *args):
... print('Need this one:', requiredl)
... print('Need this one too:', required2)
... print('All the rest:', args)
>>> print_more(' cap', 'gloves', 'scarf, 'monocle', 'mustache wax')
Need this one: cap
Need this one too: gloves
All the rest: ('scarf, 'monocle', 'mustache wax')
Вы можете использовать два астериска (**), чтобы сгруппировать аргументы – ключевые слова в словарь, где имена аргументов станут ключами, а их значения – соответствующими значениями в словаре. В следующем примере определяется функция print_kwargs(), в которой выводятся ее аргументы – ключевые слова:
>>> def print_kwargs(**kwargs):
... print('Keyword arguments:', kwargs)
В функцию можно передать несколько аргументов:
-
>>> print_kwargs()
I Keyword arguments: {}
-
>>> print_kwargs(wine='merlot', entree='mutton', dessert='macaroon')
Keyword arguments: {'dessert': 'macaroon', 'wine': 'merlot', 'entree': 'mutton'}
Внутри функции kwargs является параметром-словарем [40].
Таким образом, найден механизм передачи в функцию-регулятор неопределённого количества параметров, которые необходимо учитывать при расчете управляющего сигнала на исполнительный механизм.
Все объекты тепловой сети являются разными, даже объекты, построенные по типовому проекту, отличаются друг от друга. Отличия могут заключаться в применяемом оборудовании, степени износа сетей и механизмов, параметрах теплоисточника и потребителей. Следовательно, исключается возможность клонирования уже обученной нейросети. Нейросеть должна обучаться самостоятельно на конкретном объекте.
Изучение и использование искусственных нейронных сетей, в принципе, началось уже достаточно давно – в начале 20 века, но широкую известность они получили несколько позже. Связано это в первую очередь с тем, что стали появляться продвинутые (для того времени) вычислительные устройства, мощности которых были достаточно велики для работы с искусственными нейронными сетями. По сути, на данный момент можно легко смоделировать нейронную сеть средней сложности на любом персональном компьютере.
Нейронная сеть представляет собой совокупность нейронов, соединенных друг с другом определенным образом. Рассмотрим один нейрон (рис. 5).
Нейрон представляет собой элемент, который вычисляет выходной сигнал (по определенному правилу) из совокупности входных сигналов. То есть основная последовательность действий одного нейрона такая:
-
• Прием сигналов от предыдущих элементов сети;
-
• Комбинирование входных сигналов;
-
• Вычисление выходного сигнала;
-
• Передача выходного сигнала следующим элементам нейронной сети.
Между собой нейроны могут быть соединены абсолютно по-разному, это определяется структурой конкретной сети. Но суть работы нейронной сети остается всегда одной и той же. По совокупности поступающих на вход сети сигналов на выходе формируется выходной сигнал (или несколько выходных сигналов). То есть нейронную сеть упрощенно можно представить в виде черного ящика, у которого есть входы и выходы. А внутри этого ящика сидит огромное количество нейронов.
В многослойных (слоистых) нейронных сетях нейроны объединяются в слои. Слой содержит совокупность нейронов с едиными входными сигналами. Число нейронов в слое может быть любым и не зависит от количества нейронов в других слоях. В общем случае сеть состоит из слоев, пронумерованных слева направо. Внешние входные сигналы подаются на входы нейронов входного слоя (его часто нумеруют как нулевой), а выходами сети являются выходные сигналы последнего слоя. Кроме входного и выходного слоев в много-
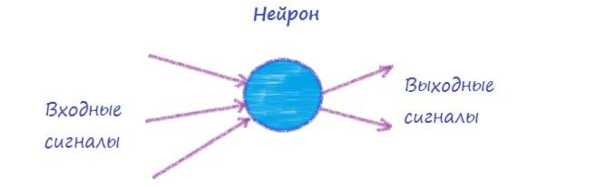
Рис. 5. Одиночный нейрон
Fig. 5. Single neuron
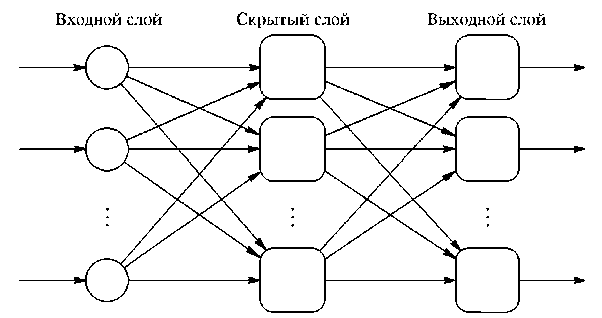
Рис. 6. Схема связей многослойной нейронной сети
Fig. 6. Link diagram of a multilayer neural network слойной нейронной сети есть один или несколько скрытых слоев. Связи от выходов нейронов некоторого слоя q к входам нейронов следующего слоя (q + 1) называются последовательными [41].
Нейросети сильно отличаются по своим задачам, архитектуре, а следовательно, и по требуемым вычислительным ресурсам. SoftPLC, используемые для задач АСУ ТП, представляют собой промышленный безвентиляторный ПК, устанавливаемый в шкафу ПТК (программнотехнический комплекс), рис. 7.
Для того чтобы SoftPLC могли составлять конкуренцию классическим контроллерам, они должны быть недорогими и надежными, поэтому в их конструкции отсутствуют вращающиеся элементы и используется маломощная компонентная база. TDP применимых процессоров редко превышает 40 Вт, так как существует проблема эффективного отвода тепла в закрытом шкафу. Общая вычислительная способность промышленных компьютеров ниже обычных бытовых компьютеров. Этот факт накладывает дополнительные ограничения на выбор архитектуры нейросети. В процессе регулирования может использоваться несколько нейросетей, поэтому необходимо применять относительно простую архитектуру с низкими требованиями к вычислительной мощности промышленного ПК.
Путем многократных экспериментов для наших задач была выбрана архитектура, состоящая из входных слоев, трех полносвязных скрытых слоев и одного выходного слоя. Количество

Рис. 7. Промышленный безвентиляторный ПК
Fig. 7. Industrial fanless PC нейронов во входном слое равно количеству параметров, передаваемых в качестве аргументов в нейрорегулятор, 64 нейрона в первом скрытом слое, 32 нейрона во втором скрытом слое, 16 нейронов в третьем скрытом слое и один нейрон в выходном слое. В результате на выходе получается выходное управляющее воздействие на исполнительный механизм.
Такая модель оказалась оптимальным балансом между скоростью, точностью и низкой вычислительной мощностью.
Для создания нейрорегулятора будет использоваться фреймворк PyTorch для языка Python. PyTorch – это фреймворк машинного обучения с открытым исходным кодом, который позволяет создавать нейронные сети и эффективно их обучать. Однако PyTorch – не единственный фреймворк такого рода. Альтернативами PyTorch являются TensorFlow/Keras , JAX . Фреймворк PyTorch имеет огромное сообщество разработчиков и особенно часто используется в научных исследованиях [42].

Рис. 8. Внешний вид испытательного стенда
Fig. 8. External view of the test bench
Для обучения нейросети в любом случае требуется база данных. После строительства или реконструкции теплового пункта базы данных быть не может, поэтому необходимо отталкиваться от того, что нейрорегулятор должен работать с нуля и обучаться уже в процессе. Для решения этой задачи было опробовано несколько моделей и проведен ряд экспериментов на испытательном стенде (рис. 8).
Самым оптимальным вариантом стало использование на начальном этапе двух параллельно работающих регуляторов: адаптивный PID-регулятор и нейрорегулятор. Адаптивный PID – это классический PID-регулятор с динамической настройкой коэффициентов, он осуществляет первоначальное регулирование и накопление данных для обучения нейросети. Так как цена ошибки на реальных объектах очень высока и права на ошибку нету, то управление на нейрорегулятор переходит постепенно, и спустя время управление полностью переходит на нейрорегулятор. На начальном этапе оба регулятора считают выходной управляющий сигнал, нейросеть постепенно обучается, и когда сходимость полученных решений от обоих регуляторов превышает 80 % (параметр настраиваемый) – управление переходит на нейрорегулятор. В случае возникновения ситуации, с которой нейросеть ранее не сталкивалась, она может ошибаться, в таком случае расхождение решений регуляторов становится существенным и на исполнительный механизм идет управляющий сигнал с PID-регулятора. В случае повторного возникновения похожей ситуации, нейрорегулятор уже безошибочно выдаст управляющее воздействие. Таким образом, со временем управление полностью переходит на нейрорегулятор.
По результатам экспериментов нейросеть без страхующего адаптивного PID-регулятора на начальных этапах могла значительно ошибаться и выдавать некорректное управляющее воздействие, но со временем она училась и таких ошибок больше не совершала. Существует множество задач, где подобные ошибки некритичны, но в тепловых сетях это недопустимо, поэтому использование для безопасности страхующего PID-регулятора полностью оправдано.
Объект исследования
Для реализации предложенных идей был выбран центральный тепловой пункт № 1 Красноярской тепловой сети по адресу: г. Красноярск ул. 9 Мая, 56 Б. Объект довольно старый, на нем присутствует часть неиспользуемого оборудования, запорная и запорно-регулирующая арматура имеет приличный износ и люфты. Частотный преобразователь также на исходе своего ресурса, при фиксированном задании обороты двигателя немного «плавают». Эти обстоятельства дополнительно усложняют задачу, но такие объекты существуют и являются «жизненными», с ними тоже нужно уметь работать. Существующая АСУ ТП вышла из строя. Поэтому было принято решение заменить сломанный контроллер на промышленный безвен-тиляторный сенсорный ПК, а модули ввода-вывода на новые и опробовать работу новой системы. Технологическая схема объекта приведена на рис. 9, а внешний вид на рис. 10.
Для удобства разработки и отладки программного обеспечения для SoftPLC был разработан Web-интерфейс. Используемый стек технологий: Django, HTML, CSS, JavaScript. По протоколу Modbus TCP было подключено два модуля ввода-вывода, по протоколу Modbus RTU подключен преобразователь частоты.
Так как нет возможности искусственно повлиять на параметры теплоисточника или потребителя, было принято решение выводить систему из равновесия изменением уставок регуляторов. Пределы изменения уставок должны быть максимально большими, но при этом безопасными. Сначала изменять уставки поочередно на каждом регуляторе, потом попарно, а потом всех трех одновременно. Для проведения испытаний были выбраны 2 рабочих дня с одинаковыми погодными условиями, один день испытания проводились с использованием классических PID-регуляторов, второй день с использованием нейросетевых регуляторов. Кроме принципа регулирования остальные условия были максимально схожими. На рис. 11 приведена циклограмма испытаний.
Обсуждение результатов исследования
Объект был введен в эксплуатацию 15.09.2023 г., а эксперимент проводился 15 и 16 марта 2024 г., следовательно, до начала эксперимента объект на SoftPLC отработал 7 месяцев. Все это время объект находился под пристальным наблюдением, работал в диапазоне температур – 314 –
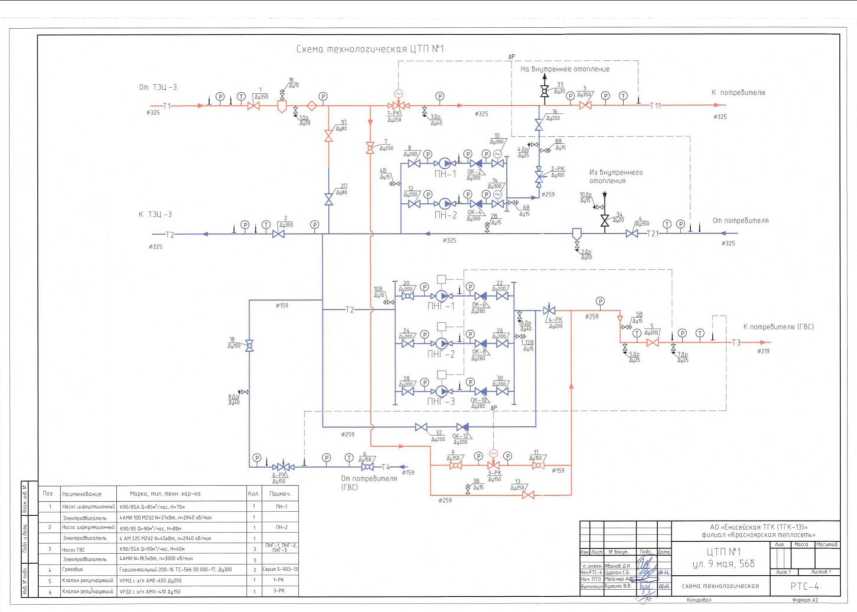
Рис. 9. Технологическая схема ЦТП № 1
Fig. 9. Technological scheme of the central heating plant No. 1

Рис. 10. Внешний вид теплового пункта
Fig. 10. External view of the heating station
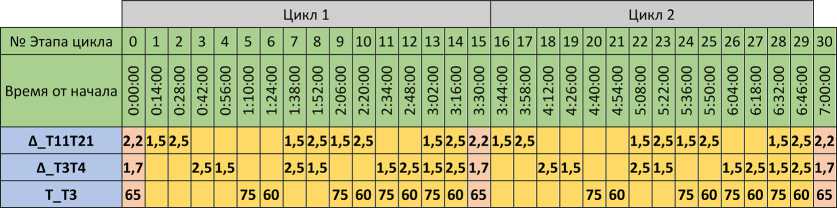
Рис. 11. Циклограмма испытаний
Fig. 11. Test cyclogram наружного воздуха от –35 ℃ до +15 ℃. На основании наблюдений можно сделать следующие выводы.
-
• SoftPLC работает на несколько порядков быстрее. Цикл дорогих программируемых промышленных контроллеров составляет десятки/сотни миллисекунд, цикл недорогих контроллеров может достигать секунд. Цикл работы SoftPLC десятки/сотни микросекунд. Давление является быстро изменяемым параметром, который может меняться скачкообразно, такая скорость работы SoftPLC положительно сказывается на скорости и точности регулирования даже с применением PID-регулятора.
-
• Снижение трафика обмена данными с системой диспетчерского контроля и управления АСУ ТП Красноярской теплосети построено преимущественно на контроллерах Siemens, связь с верхним уровнем осуществляется по протоколу S7 через мобильную сеть 4G циклическим методом с периодом от 100 мс. SoftPLC связывается с системой диспетчерского контроля и управления по протоколу OPC UA, который поддерживает систему подписок на переменные, то есть переменные передаются только в случае их изменения. Средний трафик за месяц объектов подобного уровня с контроллерами Siemens составляет порядка 10 ГБ, а трафик SoftPLC около 1,5 ГБ. Снижение объема передаваемых данных в 6–7 раз также положительно сказалось на скорости передачи и точности логирования и архивирования в системе диспетчерского контроля и управления.
За семь месяцев работы нейросеть обучилась, страховочный адаптивный PID-регулятор работал крайне редко. При этом основное обучение нейросеть прошла буквально за первые дни работы. Основным преимуществом для инженера было отсутствие необходимости какой-либо настройки, все происходит автоматически.
В ходе самого эксперимента архивировались все основные параметры по каждому регулятору, в результате были получены массивные Excel таблицы свешу 300 тысяч строк. На всех графиках синим цветом изображена уставка регулирования, красным – обратная связь от датчика, зеленым – выходной управляющий сигнал на исполнительный механизм (см. рис. 12 и 13).
В целом оба регулятора справились с испытанием. PID-регулятор управлял регулирующим клапаном в большем диапазоне, нейрорегулятор совершал меньше перемещений и в меньшем диапазоне. При более детальном рассмотрении полученных результатов видим, что в начале испытаний, когда уставка менялась только на этом параметре, графики очень схожие – 316 –
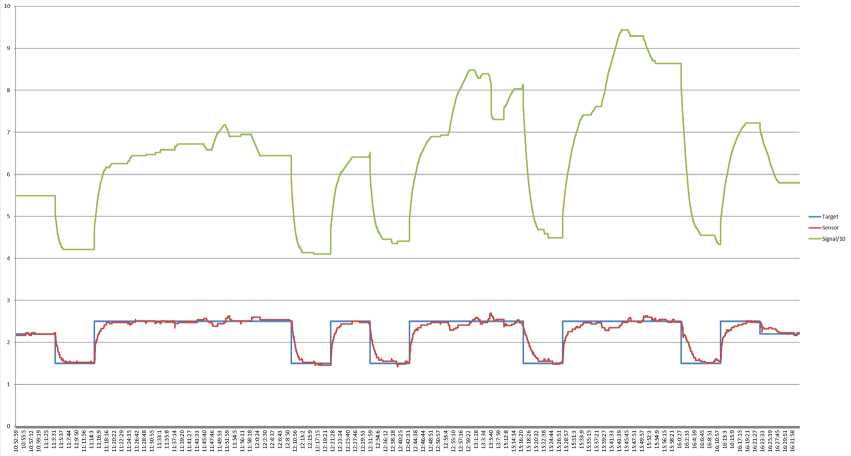
Рис. 12. Результат регулятора Δ_Т11Т21 с PID-регулятором
Fig. 12. Result of the regulator Δ_T11T21 with PID-regulator
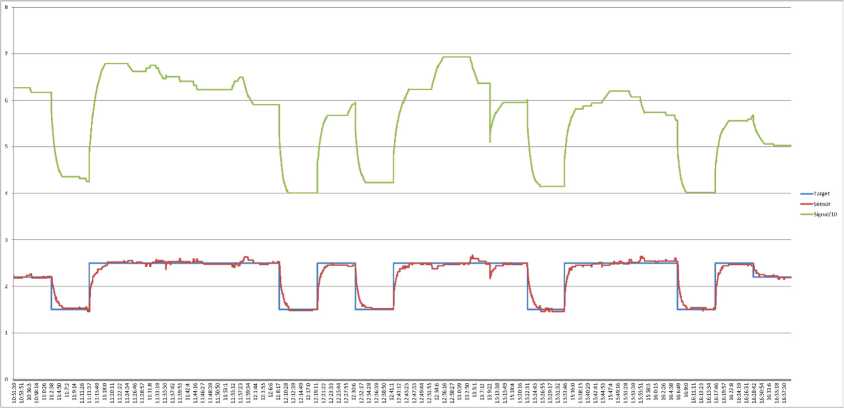
Рис. 13. Результат регулятора Δ_Т11Т21 с нейросетевым регулятором
Fig. 13. Result of the Δ_T11T21 controller with neural network controller
(рис. 14). Когда уставки регуляторов начали меняться попарно, появилось взаимовлияние двух регуляторов (рис. 15).
Тут уже начинает проявляться преимущество нейрорегулятора – видно, что скорость и точность переходных процессов выше. Удержание параметра на заданной уставке у нейрорегулятора получается лучше, хотя тоже неидеально, так как это были новые условия для нейросети, но главное, что в этот момент нейросеть обучалась.
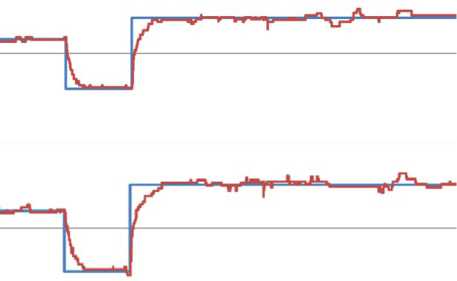
Рис. 14. Графики переходных процессов обоих регуляторов при изменении одной уставки
Fig. 14. Transient plots of both regulators when changing one set point
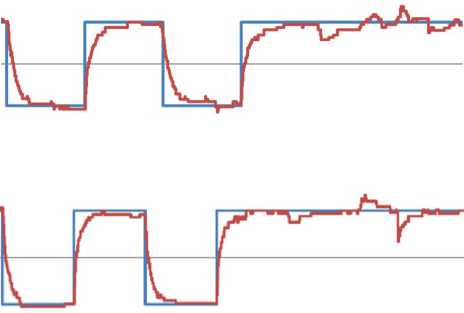
Рис. 15. Графики переходных процессов обоих регуляторов при попарном изменении уставок
Fig. 15. Transient plots of both regulators at pair change of setpoints
Регулирование температуры является наиболее сложным процессом по следующим причинам:
-
• большая инерционность процесса. В трубе установлена гильза, заполненная маслом, а в гильзе установлен датчик. Процесс смешения, нагрева, охлаждения занимает много времени. Для таких задач в PID-регуляторе интегральный коэффициент настраивается достаточно большим, порядка 120 с;
-
• процесс регулирования температуры ГВС напрямую зависит от температуры в подающем и обратном трубопроводе. Когда эта разница большая, регулирование осуществляется более точно и быстро, но весной и осенью задача усложняется, клапану необходимо сильно изменять свое положение для изменения температуры даже на 1 ℃.
На рис. 16 и 17 представлены результаты для регулятора Т_Т3.
Как видно из графиков, оба регулятора плохо, но справились с задачей: во-первых – это частая проблема в тепловых сетях в теплый период времени. Как видно, еще до начала испытаний PID-регулятор имел автоколебания, процесс был несходящийся – это видно по характерной «пиле» с датчика положения клапана и синусоидально изменяющейся температуре. Во- – 318 –
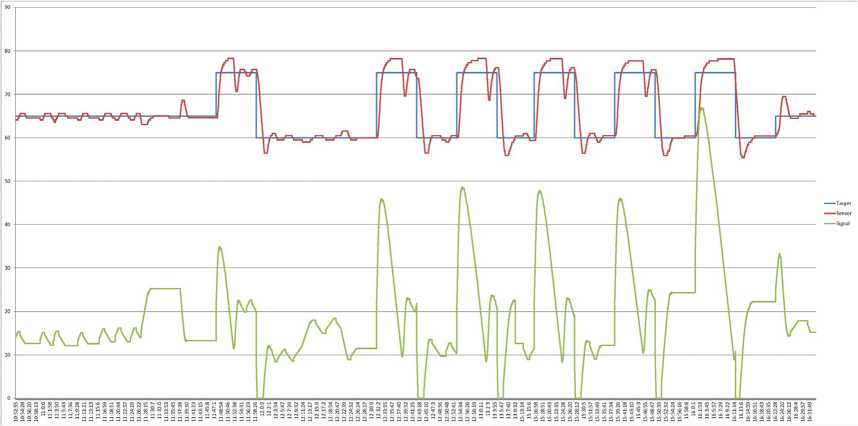
Рис. 16. Результат регулятора Т_Т3 с PID-регулятором
Fig. 16. Result of T_T3 controller with PID controller
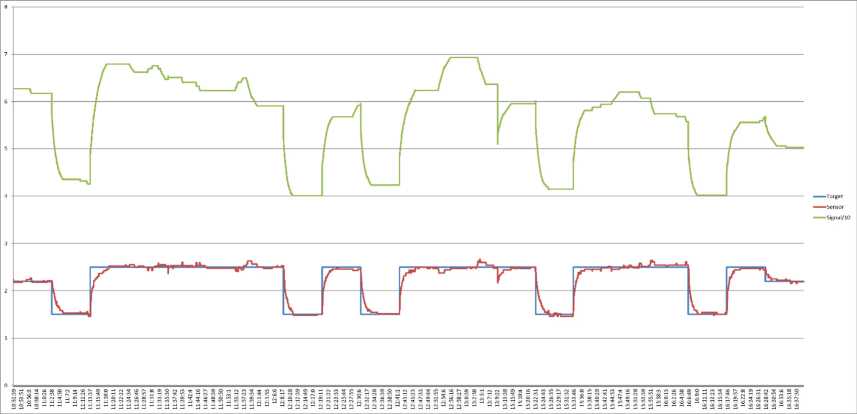
Рис. 17. Результат регулятора Т_Т3 с нейросетевым регулятором
Fig. 17. Result of T_T3 controller with neural network controlle вторых, температура ГВС – это параметр, который со временем изменять нет необходимости, как правило, температура настраивается один раз и весь ОЗП не меняется. Это привело к тому, что нейросеть научилась держать этот параметр, но не научилась его изменять, так как не было достаточного количества переходных процессов для обучения. Как видно, положение клапана было статично, температура постоянна, никаких колебаний не было.
Поэтому испытания проходили на общих основаниях для обоих регуляторов, и нейросеть в первый раз решала эту задачу, часто подключался страхующий адаптивный PID-регулятор.
Первичные колебания температуры обоих регуляторов имели соизмеримую амплитуду, но вторичные колебания у нейросетевого регулятора были значительно меньше. Более того, нейрорегулятор намного бережней управлял клапаном, он перемещался в диапазоне 0–27 %, а PID-регулятор изменял положение клапана в диапазоне 0–66 %. График положения клапана у нейрорегулятора более плавный. Каждый переходной процесс PID-регулятор совершал абсолютно одинаково, графики полностью идентичны, а нейрорегулятор каждый переходный процесс совершал немного по-разному, что свидетельствует о процессе обучения. Поэтому нейрорегулятор все же показал себя лучше классического PID-регулятора.
Выводы
Если комплексно оценить итоги испытаний, то можно констатировать – нейросетевой регулятор тотально превосходит PID-регулятор по всем показателям, но реализовать такое регулирование очень сложно и невозможно на классических аппаратных контроллерах.
Скорость, точность, адаптивность – это главные плюсы нейрорегулятора, которые обеспечивают стабильный технологический процесс в любых условиях с минимальными затратами энергоресурсов.
