Современные методы организации дорожного движения в городах

Автор: Шепелев Владимир Дмитриевич, Альметова Злата Викторовна, Михальчук Вероника Владиславовна, Слободин Иван Сергеевич
Рубрика: Логистика и управление транспортными системами
Статья в выпуске: 4 т.13, 2019 года.
Бесплатный доступ
Оптимальная синхронизация сигналов светофора является эффективным и действенным способом уменьшения заторов на дорогах. Внедрение автоматической системы светофорного регулирования создает ряд преимуществ по сравнению с индивидуальным регулированием на каждом перекрестке. Система «Зеленая волна» была разработана с целью обеспечения непрерывного и безопасного перемещения транспортных средств на магистральных дорогах. В статье представлен всесторонний обзор исследований, посвященных различным методам расчета и оптимизации «зеленых волн». Основная цель этих методов заключается в уменьшении количества остановок и минимизации времени в пути. Проанализированные работы были разделены на несколько групп: классическая модель, использование циклически расширенных сетей, моделирование на основе программы MATLAB, многоагентные системы.
Зеленая волна, управление движением, светофорное регулирование, транспортные потоки, оптимизация движения, пропускная способность
Короткий адрес: https://sciup.org/147232454
IDR: 147232454 | УДК: 625.02 | DOI: 10.14529/em190419
Modern methods of road traffic management in cities
Optimum synchronization of traffic signals is an effective and efficient way to reduce traffic jam. The introduction of an automatic traffic light system creates a number of advantages compared to individual regulation at every crossroad. The Green Way System was developed to ensure continuous and safe movement of vehicles on motorways. In this paper, we present a comprehensive overview of the studies on various methods for calculating and optimizing “Green Waves”. The main goal of these methods is to reduce the number of stops and minimize travel time. The analyzed works were divided into several groups: the classical model, the use of cyclically expanded networks, modeling based on the MATLAB program, multi-agent systems.
Текст научной статьи Современные методы организации дорожного движения в городах
Увеличение автомобилизации за последние годы создает проблему обеспечения безопасности дорожного движения. Заторы являются следствием как сложившейся застройки городов, обуславливающей низкую пропускную способность, так и несоответствия режимов работы светофорной сигнализации реальным условиям движения. Существующие пути решения транспортной проблемы современного города разделяются на архитектурно-планировочные мероприятия и меры организационного характера. Архитектурно-планировочные мероприятия ограничены в реализации своей капиталоемкостью, а в некоторых случаях и вообще невозможны. В такой ситуации единственно возможным решением становится разработка прогрессивных, действенных методов управления. Одним из самых эффективных путей решения проблемы является оптимизация режимов работы объектов светофорного регулирования [1].
Теория
На сегодняшний день существует несколько режимов, которые позволяют переключать светофоры на дорогах, и большинство из них полуавтоматические. Работа светофора в обычном режиме характеризуется постоянной продолжительностью зеленого и красного сигналов и всего цикла [2]. Такие режимы работы в часы пик являются неэффективными. Для устранения недостатков предлагается использовать систему «зеленая волна».
Организация согласованной смены сигналов на группе перекрёстков, осуществляемая в целях уменьшения времени движения транспортных средств в заданном районе, называется координированным управлением (управлением по принципу «зелёной волны»). В этом случае, как правило, используется системное управление.
Принцип координации заключается во включении на последующем перекрестке по отношению к предыдущему зелёного сигнала с некоторым сдвигом, длительность которого зависит от времени движения транспортных средств между этими перекрёстками. Таким образом, транспортные средства следуют по магистрали (или какому-либо маршруту движения) как бы по расписанию, прибывая к очередному перекрёстку в тот момент, когда на нём в данном направлении движения включается зелёный сигнал. Это обеспечивает уменьшение числа неоправданных остановок и торможений в потоке, а также уровня транспортных задержек.
Для организации координированного управления необходимо выполнение следующих условий: наличие не менее двух полос для движения в каждом направлении; одинаковый или кратный цикл регулирования на всех перекрёстках, входящих в систему координации; транзитность потока должна быть не менее 70 %; расстояние между соседними перекрёстками не должно превышать 800 м.
Существует множество трудностей, которые возникают при организации «зелёной волны». Например, выбор расчетной скорости движения, распад группы автомобилей на длинных перегонах, наличие внегрупповых автомобилей, изменение условий и интенсивностей движения в различные периоды времени, организация левых поворотов по магистрали с координацией и другие. Реальное влияние этих факторов зачастую можно оценить только после внедрения системы, поэтому в процессе эксплуатации этой системы программа координации требует своей дальнейшей доработки.
Показателем эффективности работы «зелёной волны» является степень снижения времени проезда автомобиля от начального до конечного пункта магистрали, на которой внедрена система координации. Также показателями могут служить относительная ширина ленты времени и коэффициент безостановочной проходимости [3].
Рассмотрим методы, направленные на оптимизацию режима «зеленой волны», выявим их преимущества и недостатки.
Обсуждение
Классическая модель
В исследовании [4] представлен пример классической математической модели для автономной оптимизации. Целевая функция, используемая в автономном оптимизаторе, не учитывает мультиобъективность, но может быть заменена более точным показателем производительности.
В работе представлена модель, типичная для автономных оптимизаторов, которая приведена с небольшими изменениями:
min TT ( V , q * ( ¥ ) ) = £ ^ q l - tt ( V , q * ( Y ) ) , (1)
при условии:
c min,n
n
max, n ,
где ТТ – общее время перемещения по сети, с; Ψ – набор настроек синхронизации сигнала; l – индекс звена (участка), l е{1,..., L}; ql - пользовательское равновесие потоков на участке, заданное параметрами сигналов светофора, ql е q *(Y); ti (Y, q * (V)) - время прохождения по участку l c учетом длительности сигнала и реакции пользователя (водителя); C – время цикла на перекрестке n, n е {1,..., N} .
0 <9 n < C n - 1, V n , (3) где 9 n - смещение перекрестка n .
ф тш, np < ф np < ф тах, np , V np , (4) где ф np - фаза p зеленого сигнала для перекрестка n ; p – указатели фаз на пересечении n , p е { 1,-, P n } .
C n = Е P " = 1 ( ^ np + I np ) , V n , (5) где I – межступенчатое (потерянное) время от конца фазы p до следующей.
В данной модели выбранным показателем эффективности является время перемещения, определяемое как сумма произведения потока на каждом участке и времени перемещения по всей сети и Y = {C,6,ф}. Равновесные пользовательские потоки рассчитываются с использованием вариационного неравенства.
Сумма времени зеленого сигнала и потерь времени для всех фаз должна составлять время цикла, как видно из (5). Выражения (2) и (4) являются мерами безопасности, введенными инженерами по безопасности дорожного движения, чтобы избежать критических ситуаций, таких как полное подавление зеленого сигнала для второстепенной дороги или очень большое время цикла, которое в противном случае было бы выбрано при перегруженности дорог. Выражение (3) корректирует смещения таким образом, чтобы создавать режим зеленой волны, но имеет отношение только к модели общего времени цикла, которая является частным случаем представленной модели, когда V n : Cn = C . Смещение всегда рассматривается как модуль общего времени цикла, и, следовательно, координация невозможна (в этой модели), если все светофоры на пересечениях работают по собственным счетчикам.
В дополнение к этому недостатку, модель не учитывает фазовые последовательности. Фазы просто нумеруются и выделяется время для зеленого сигнала – порядок считается заданным.
Оптимизация сигналов светофора с использованием циклически расширенных сетей
В исследовании [5] разработана оптимизация работы сигнала светофора для расчета «зеленых волн» с использованием циклически расширенных сетей. Цель этого исследования – минимизировать время прохождения всех участников дорожного движения, учитывая одновременно оптимальную сигнализацию светофора и распределение транспортных средств на каждом перекрестке. Оно основано на расширенной временной сети, обеспечивающей практическое применение сигналов светофора. Авторы проводят обширные имитационные эксперименты с использованием двух установленных инструментов моделирования движения, которые раскрывают преимущества модели.
Оптимальная разработка светофорного регулирования и моделирование на основе MATLAB
В работе [6] представлена двунаправленная стратегия «зеленой волны», основанная на обратной оптимизации зеленого сигнала. В данной работе моделируют оптимизацию прохождения автомобилей в режиме «зеленой волны» по встречной полосе с использованием программного обеспечения MATLAB. Целью данного исследования является устранение остановок автомобилей, движущихся в противоположных направлениях, путем улучшения времени (или скорости) прохождения участка дороги.
Логистика и управление транспортными системами
Адаптивная система управления светофорами с использованием специальной сети связей между автомобилями
В этой модели представлен анализ интеллектуальной системы управления движением «зеленой волны» с учетом поведения водителей. Предложенное решение объединяет 2 метода: математический подход и нечеткую логику (пакет расширения MATLAB) [7]. Кроме того, предлагаемая система учитывает новые параметры, такие как погода, тип транспортного средства и дорожная обстановка. Предлагаемая модель адаптивной системы управления светофорами показана на рис. 1.
Предполагается, что все рассматриваемые дороги являются дорогами с двусторонним движением и каждое направление имеет три полосы. Требуемый уровень информации и сбор данных обеспечиваются технологиями беспроводной или проводной связи между транспортными средствами (V2V) и между транспортными средствами и инфраструктурой (V2I). Система V2X, связанная с сетью датчиков, предоставляет точную информацию о количестве и типе транспортных средств, поведении водителей на участках между двумя перекрестками (скорость, количество ТС на полосе движения). При этом система должна обладать базой данных для информационной инфраструктуры (длина участка дороги, количество полос и ограничения скорости).
Многоагентное управление нечеткими сигналами на основе моделирования в реальном времени
Другие подходы основаны на мультиагентной парадигме. Многоагентные системы состоят из интеллектуальных агентов, способных разрабаты- вать самостоятельные действия и совместно разрабатывать задачи для решения сложных систем и предназначенные для оптимизации управления сигналом и транспортными потоками с использованием агентов и нечеткой логики [8].
В этой модели представлена система управления сигналами дорожного движения, основанная на моделировании в реальном времени, многоагентной схеме управления и системе нечеткого вывода (Fuzzy Inference System). Эта система под названием HUTSIG тесно связана с микроскопическим имитатором движения HUTSIM (микроскопическая модель высокой точности, которая была разработана для широкого спектра применений и хорошо откалибрована по полевым измерениям). Система связана с данными детектора в реальном времени. Цель состоит в том, чтобы максимально реалистично смоделировать сложившуюся ситуацию с дорожным движением. Онлайн-симуляция может использоваться для мониторинга общего состояния системы дорожного движения, несмотря на неполный ввод детектора.
Адаптивное нечеткое управление городскими транспортными потоками с использованием совместной мультиагентной системы на основе двухэтапной нечеткой кластеризации
В этой модели разрабатывается адаптивная и кооперативная многоагентная нечеткая система для децентрализованного управления сигналами светофора. Разработана модель, которая имеет три уровня контроля. Каждый перекресток контролируется собственной транспортной ситуацией, соответствующими рекомендациями и базой знаний, которая предоставляет схему движения по нему.
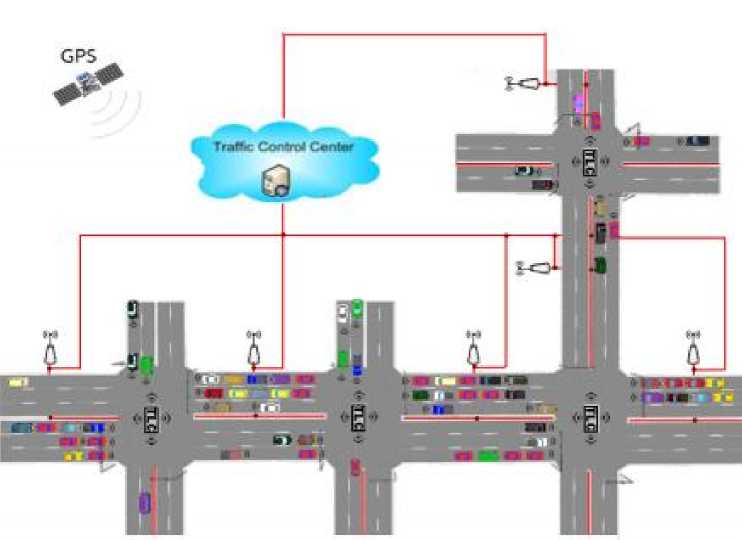
Рис. 1. Предлагаемая модель адаптивной системы управления светофорами
На рис. 2 изображена структура системы [9].
Рассматриваемая система была протестирован и показала, что среднее время задержки может быть уменьшено на 42,76 % по сравнению с обычной работой светофора с фиксированной последовательностью и на 28,77 % по сравнению со стратегией управления движением транспортного средства.
На рис. 3 представлено сравнение среднего времени задержки по каждой стратегии.
Нейросетевое моделирование режимов работы светофорных объектов с целью организации движения транспортных потоков по принципу «зеленой волны»
В работе [10] исследуются возможности применения нейросетевого моделирования для организации движения транспортных средств по принципу «зеленой волны». Проблема определения временного сдвига при последовательном включении зеленого сигнала системы перекрестков является здесь ключевой. Для обучения нейросети необходимо создать выборку входных данных (расстояния между перекрестками, скорость перемещения потока) и рассчитать для них выходные данные. Нейросетевое моделирование проводится в среде Matlab. В процессе обучения нейросеть должна понять, что ей необходимо сделать с входящими значениями, чтобы получить исходящие. После обучения нейросеть рассчитывает, в случае необходимости, новые значения, которых не было в первоначальной выборке. После обучения нейросети программа строит зависимость точности моделирования (ошибки) от времени обучения. На рис. 4 изображена зависимость ошибки от количества эпох обучения нейросети.
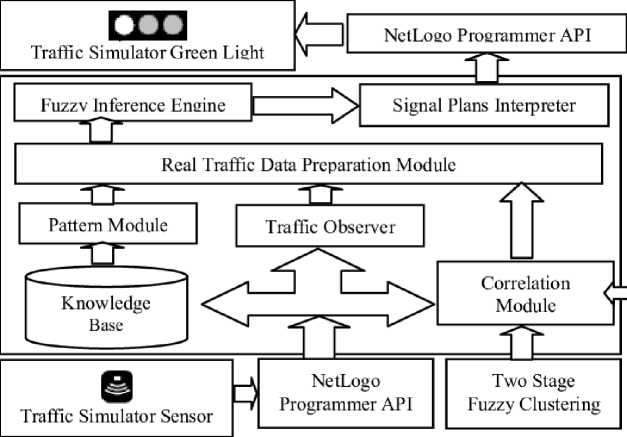
Рис. 2. Структура системы

Рис. 3. Сравнение среднего времени задержки по каждой стратегии
Логистика и управление транспортными системами
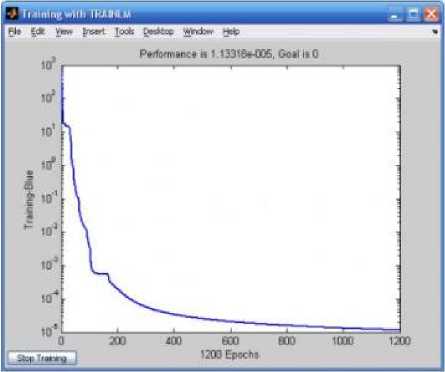
Рис. 4. Зависимость ошибки от количества эпох обучения нейросети
В том случае, если процент ошибки не слишком большой, тогда можно оставить первоначальные параметры нейросети без изменения. В противном случае можно использовать более подходящую нейросеть, например, увеличивая количество эпох. Нейросетевое моделирование позволяет определить время задержки горения зеленого сигнала в системе светофоров регулируемых перекрестков.
Методика проектирования зеленых волн путем использования графоаналитического метода
Предлагаемая авторами [11–14] методика проектирования «зеленых волн» основана на использовании графоаналитического метода, применение которого целесообразно для расчета координированного движения на магистралях любой протяженности с числом полос движения не менее двух. Основным недостатком этого метода является большая трудоемкость.
Для расчета координированного управления необходимы: схемы движения на перекрестках, длительность цикла, интенсивность движения по направлениям, расстояние между перекрестками, скорость движения по зеленой волне. Для повышения эффективности координированного движения предлагается скорость движения по «зеленой волне» устанавливать с учетом: уровня загрузки регулируемых пересечений ZТ,Zp, количества полос движения n, длины перегона LП и установившейся скорости иус:
U зв — и ср — f ( и ус , Z T , Z p , n , L n ) . (6)
На основе исследований установлены особенности изменения скоростного режима транспортных потоков в зоне разгона и торможения у регулируемых перекрестков. Выявлено, что скорость транспортного потока в зоне перекрестка меняется в зависимости от уровня его загрузки и числа полос движения. Скорость транспортного потока на участке с тремя полосами движения в одном направлении представлена на рис. 5.
Исследование режимов движения в зонах разгона и торможения позволило выявить закономерности движения транспортного потока при прохождении перекрестков. Движение на зеленый сигнал светофора в условиях плотных транспортных потоков и близко расположенных регулируемых пересечений не гарантируют транспортному потоку движение в режиме постоянной скорости. На перегонах длиной до 950 м при обеспечении беспрепятственного проезда движение носит пилообразный характер: зона разгона сменяется зоной торможения и наоборот. На рис. 6 представлен график изменения скорости транспортного потока на участке с тремя полосами движения при уровне загрузки в зоне разгона Zp = 0,7…1 и различном уровне загрузки в зоне торможения ZТ .
Выполненные исследования позволяют рассчитать оптимальную скорость движения потока по зеленой волне и оптимизировать функционирование координированного регулирования движе-
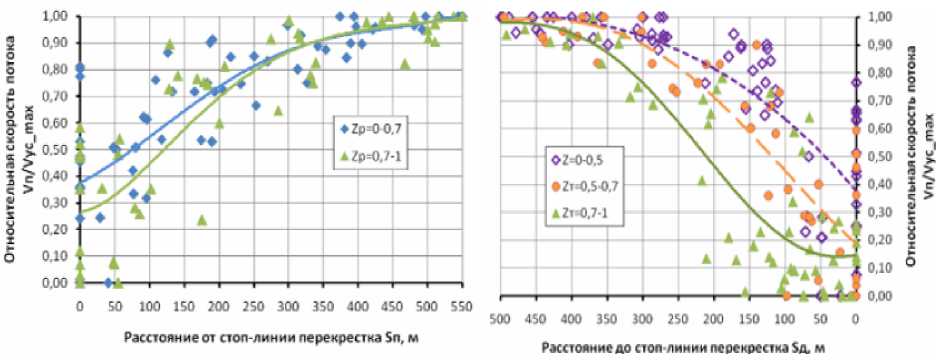
Рис. 5. Скорость транспортного потока в зонах разгона и торможения
ния при действии зеленой волны в одном направлении. На рис. 7 представлена блок-схема проектирования координированного регулирования движения [15].
Методику проектирования координированного регулирования движения городского транспорта рекомендуется использовать при разработке проектов организации дорожного движения, комплексных транспортных схем городов.
Заключение
Количество методов, включенных в этот обзор, составило 8. Анализ показал, что модели, работающие с общим временем цикла, менее эффективны, чем адаптивные системы регулирования движения, основанные на моделировании на основе программ MATLAB, нейронных сетей и др. Многоагентные технологии с использованием агентов и нечеткой логики показали свою эффективность для разработки интеллектуальных транспортных систем.
Все исследования, приведенные в статье, направлены на оптимизацию режима «зеленой волны». Каждый метод в той или иной степени позволяет уменьшить аварийность, увеличить пропускную способность элементов УДС, снизить экологическую нагрузку и улучшить моральное состояние водителя.
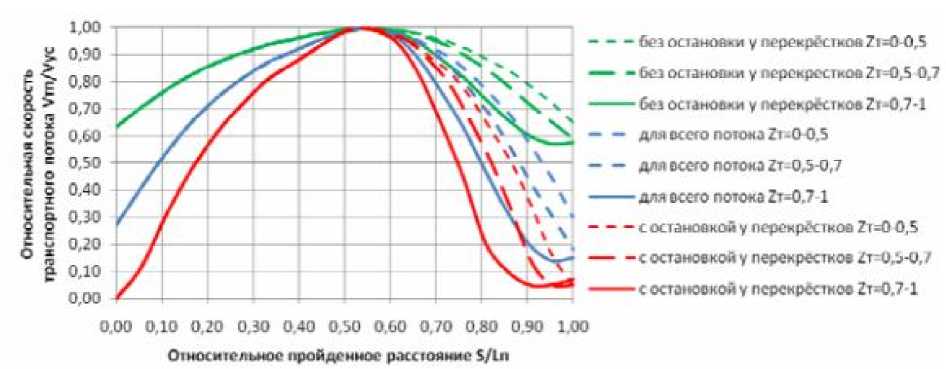
Рис. 6. Изменения скорости транспортного потока

Рис. 7. Блок-схема проектирования координированного регулирования движения
Логистика и управление транспортными системами
Список литературы Современные методы организации дорожного движения в городах
- Ширин, В.В. Повышение пропускной способности улично-дорожной сети города/ В.В. Ширин // Вестник ХНАДУ - 2010. - Вып. 50.
- Тарасов, О.В. Оптимизация режимов работы объектов светофорного регулирования методами нечеткой логики / О.В. Тарасов, С.Н. Корнилов // Современные проблемы транспортного комплекса России - 2012. - C. 139-142.
- "Зеленая волна": как поймать и не потерять. - 2019. - https://www.autonews.ru/news/ 5ca9d3949a79474e4417d211?ruid=UET9A12Ygwsv1PL8A3jpAg==https://www.autonews.ru/news/5ca9d3949a79474e4417d211?ruid=UET9A12Ygwsv1PL8A3jpAg (дата обращения: 20.09.2019 г.).
- Teklu F., Watling D., Sumalee A. A genetic algorithm approach for optimizing traffic control signals considering routing // Computer-Aided Civil and Infrastructure Engineering. - 2007. - V. 22. - P. 31-43.
- Köhler E., Strehler M. Traffic signal optimization using cyclically expanded networks // Conference Workshop on Algorithmic Approaches for Transportation Modeling, Optimization, and Systems Project: Traffic Signal Optimization. - Liverpool, United Kingdom, 2015.
- Jianhua W. Ning L., Enhong X., Xin Z. Optimal design for traffic light and simulation based on MATLAB // International Conference on Mechanic Automation and Control Engineering. - Wuhan, China, 2010.
- Tomescu O., Moise I.M., Stanciu A.E., Băţroş I. Adaptive traffic light control system using adhoc vehicular communications network // U.P.B. Sci. Bull., Series D. - V. 74, iss. 2.
- Kosonen I. Multi-agent fuzzy signal control based on real-time simulation // Transportation Research Part C. - 2003. - V. 11. - P. 389-403.
- DOI: 10.1016/S0968-090X(03)00032-9
- Daneshfar F., Ravan Jam Jah J., Mansoori F., Bevrani H., Azami B.Z. Adaptive fuzzy urban traffic flow control using a cooperative multi-agent system based on two stage fuzzy clustering. VTC Spring 2009 - IEEE 69th Vehicular Technology Conference. - Barcelona, 2009.
- Тарасов, О.В. Нейросетевое моделирование режимов работы светофорных объектов с целью организации движения транспортных потоков по принципу "зеленой волны" / О.В. Тарасов, С.Н. Корнилов // Актуальные проблемы современной науки, техники и образования - 2012. - № 70. - С. 12-14.
- Врубель, Ю.А. Организации дорожного движения / Ю.А. Врубель. - Минск: Фонд безопасности дорожного движения, 1996. - 326 с.
- Аземша, С.А. Обеспечение безопасности дорожного движения и перевозок / С.А. Аземша, В.А. Марковцев, Д.В. Рожанский. - Гомель: БелГУТ, 2011. - 259 с.
- Петров, В.В. Автоматизированные системы управления дорожным движением в городах / В.В. Петров. - Омск: СибАДИ, 2007. - 104 с.
- Кременец, Ю.А. Технические средства организации дорожного движения / Ю.А. Кременец, М.П. Печерский, М.Б. Афанасьев. - М.: Академкнига, 2005. - 279 с.
- Алексиков, С.В. Повышение скорости автотранспорта на основе регулирования движения по "зеленой волне" / С.В. Алексиков, Г.И. Беликов, В.А. Пшеничкина, С.В. Волченко // Интернет-Вестник ВОЛГГАСУ. - 2013. - № 2(27). - С. 27.
