Создание искусственной силы тяжести при помощи колебательных систем, имеющих силовые характеристики с участками квазинулевой жесткости

Автор: Зотов А.Н., Валеев А.Р.
Журнал: Российский журнал биомеханики @journal-biomech
Статья в выпуске: 2 (64) т.18, 2014 года.
Бесплатный доступ
Целью данных исследований является создание принципиально новых колебательных систем с квазинулевой жесткостью для появления искусственной силы тяжести. Создание искусственной силы тяжести актуально для ликвидации негативных последствий, вызываемых невесомостью, особенно при длительных космических полетах, например на Марс. Кроме того, системы для получения искусственной силы тяжести применяют и в гравитационной терапии, которая сейчас бурно развивается. В настоящее время для создания искусственной силы тяжести в основном используются центрифуги, в частности центрифуги малого радиуса действия. Предлагаемые колебательные системы имеют ряд преимуществ по сравнению с центрифугами, например в условиях космического полета позволят получать перегрузку больше 1 g. В статье предложены новые способы создания искусственной силы тяжести при помощи колебательных систем, имеющих заданные силовые характеристики с участками квазинулевой жесткости (квазипостоянной восстанавливающей силы). Рассмотрены колебания систем с двумя видами силовых характеристик. В первом случае происходит разворот человека дважды за период колебаний на 180 град, за счет чего заданная постоянная восстанавливающая сила все время, за исключением времени разворота, направлена в одну и ту же сторону, например со стороны ног в голову. Во втором случае колебания происходят без разворота: заданная постоянная восстанавливающая сила действует в течение только части периода колебаний, в остальное время на человека действует сила, противоположная по направлению. Данные способы получения искусственной силы тяжести позволят получать заданную перегрузку, которая может составлять несколько g. Рассмотрены и рассчитаны схемы конструкций на основе упругих элементов, перемещающихся между направляющими расчетной формы, позволяющие получать заданные силовые характеристики предлагаемых колебательных систем. Для более полного понимания рассматриваемых в статье вопросов необходима серия экспериментов как в земных условиях, так и в космосе.
Короткий адрес: https://sciup.org/146216133
IDR: 146216133 | УДК: 530.152.1
Текст научной статьи Создание искусственной силы тяжести при помощи колебательных систем, имеющих силовые характеристики с участками квазинулевой жесткости
Проблема создания искусственной силы тяжести при длительных космических полетах в настоящее время стоит достаточно остро. Как показали исследования доктора медицинских наук Оганова, процесс восстановления нормальной минеральной плотности человека при космическом полете занимает в 2–3 раза больше времени, чем длится сам полет, и после продолжительных космических экспедиций растягивается на годы [8].
В настоящее время для создания искусственной силы тяжести в основном применяются центрифуги: влияние на организм человека сил инерции эквивалентно влиянию сил тяжести. Доктором медицинских наук Волеговым предложены тренажеры для космонавтов, в которых используются силы инерции, возникающие при возвратнопоступательных колебаниях [3].
В 2011 г. НАСА предложило проект космической станции («Наутилус-Х»), один из модулей которой будет вращаться, обеспечивая искусственную гравитацию в 0,11– 0,69 g . Диаметр вращающегося модуля равен 9,1 либо 12 м, а сам модуль будет служить спальным местом для шести космонавтов [10]. Но полученная в этом случае микрогравитация, по-видимому, не устранит всех негативных последствий, вызываемых невесомостью [7]. Получить искусственную гравитацию с перегрузкой 1 g и более в течение продолжительного времени при помощи центрифуг короткого радиуса из-за проблем с вестибулярным аппаратом проблематично. При использовании таких центрифуг центробежные силы, действующие на разные участки тела (голова, …, ноги), различны.
Вопрос возможности применения больших перегрузок (больше 1 g ) при длительных космических полетах в современной научной литературе практически не освещен [2]. С этой точки зрения предлагаемые в статье способы создания искусственной силы тяжести за счет колебательных систем, имеющих силовые характеристики с квазинулевой жесткостью (квазипостоянной силой), при помощи которых возможно получать необходимые повышенные перегрузки, являются весьма актуальными.
Впервые идея использовать колебательные системы с квазинулевой жесткостью для создания необходимой перегрузки при космических полетах была высказана авторами на X съезде по фундаментальным проблемам теоретической и прикладной механики (Нижний Новгород, 24–30 августа 2011 г.) на подсекции «Колебания механических систем» [5] и получила положительные отзывы механиков
Материалы и методы
Системы с квазинулевой жесткостью, когда на рабочем участке силовой характеристики восстанавливающая сила постоянна при изменении координаты точки ее приложения, известны с 70-х годов прошлого века [1]. Они нашли применение в основном в области виброзащиты. Получение систем, имеющих заданные силовые характеристики, в частности с участками квазинулевой жесткости (квазипостоянной восстанавливающей силы), возможно на базе упругого элемента, перемещающегося между направляющими расчетной формы [4, 11].
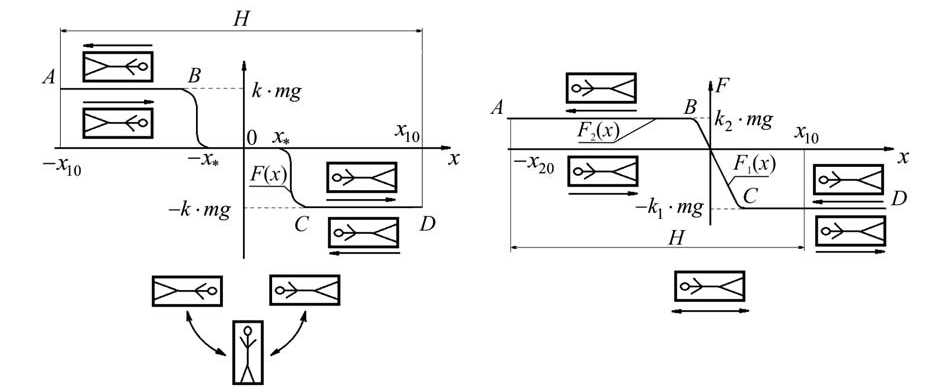
Для создания искусственной силы тяжести предлагается использовать колебательные системы, имеющие силовые характеристики с квазинулевой жесткостью (квазипостоянной восстанавливающей силой), изображенные на рис. 1. На участках AB и CD на космонавта при колебаниях будет действовать необходимая постоянная сила k∙mg ( а ); k 1 ∙mg ; k 2 ∙mg ( б ), где k , k 1 , k 2 – коэффициенты перегрузки; m – масса кабины с космонавтом; g – ускорение свободного падения .
Система с силовой характеристикой, представленной на рис. 1, а , предполагает разворот космонавта дважды на 180 град за период колебаний (участок BC ). Сила воздействия на космонавта инерционных сил при этом будет направлена почти постоянно (за исключением времени разворота) в одну сторону, например со стороны головы в ноги – аналог земного притяжения.
В колебательной системе с силовой характеристикой, представленной на рис. 1, б , разворота космонавта не происходит: на участке CD на космонавта в определенном направлении (на рисунке со стороны ног в сторону головы) действует заданная постоянная восстанавливающая сила k 1 ∙mg. После «плавного» прохождения нейтрального положения (участок СВ ) на космонавта будет действовать восстанавливающая сила k 2 ∙mg , направленная в противоположную сторону.
На рис. 2 представлена видеограмма выполнения гребка, сделанная скоростной видеокамерой. Временной интервал между кадрами составляет 0,004 с. Шаг раскадровки составляет 8 кадров или 8 ∙ 0,004 = 0,032 с.
Данные системы создания искусственной силы тяжести предполагается использовать в первую очередь при длительных космических полетах для ликвидации отрицательного влияния невесомости. Поскольку масса космического аппарата в этом случае может достигать нескольких сотен тонн, а масса кабины с колеблющимся космонавтом 100–200 кг, то можно считать, что колебательные системы с силовыми характеристиками, изображенными на рис. 1, присоединены к неподвижному основанию. Тогда свободные нелинейные колебания кабины с космонавтом, принимаемой за точку, в случае силовой характеристики, изображенной на рис. 1, а , будут описываться следующим дифференциальным уравнением:
m • x = - ( k • mg • th[ k * • (| x | + x * )] + k • mg ) • sign[ x ] / 2 , (1) где m – масса колеблющейся кабины с космонавтом, m = 100 кг; k * – безразмерный коэффициент, учитывающий форму восстанавливающей силы на участке ВС , к * = 100; x * – координата, определяющая длину участка разворота, должна быть такой, чтобы позволить разворот космонавта с допустимой угловой скоростью, ограниченной возможностями вестибулярного аппарата космонавтов.
Начальные условия дифференциального уравнения (1) следующие: x 0 = x 10; x0 = 0, где x 10 - начальное отклонение кабины из нейтрального положения.
а б
Рис. 1. Силовые характеристики предлагаемых колебательных систем для получения искусственной силы тяжести: а – с разворотом; б – без разворота (стрелками указаны направления движения (скорости) кабины с космонавтом)
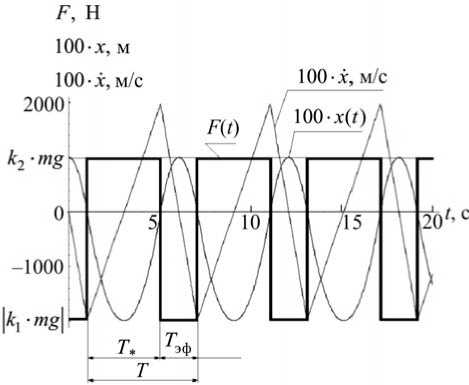
На рис. 2 представлены зависимости восстанавливающей силы (правая часть дифференциального уравнения (1)), перемещения кабины с космонавтом (100 ∙ x ( t ) ) и ее скорости (100 • x ( t )) от времени, полученные решением дифференциального уравнения (1) при k = 1. Величина x * должна быть такой, чтобы при заданном значении x 10
средняя угловая скорость кабины ( ωср
π
= , где
T *
T * – время разворота) при развороте на
участке (–x* , …, x* ) (см. рис. 1, а) была не больше заданной, ограниченной возможностями вестибулярного аппарата космонавтов. В данном примере
ωср ≈ 0,81 с - 1
или количество оборотов в минуту n =
ω ⋅ 30
π
7,7. Это больше, чем
«желательное» значение количества оборотов в минуту для центрифуг n* = 2...4, но меньше, чем количество оборотов в минуту, возникающее при работе центрифуг короткого радиуса, предложенных НАСА [10]. Например, как было указано выше, при перегрузке k = 0,69 и радиусе 9,1/2 = 4,55 м количество оборотов в минуту будет n = 11,65. В предлагаемом способе создания искусственной силы тяжести вращение происходит дважды за период колебаний в противоположные стороны. Для определения предельной величины угловой скорости в этом случае необходимы дополнительные исследования.
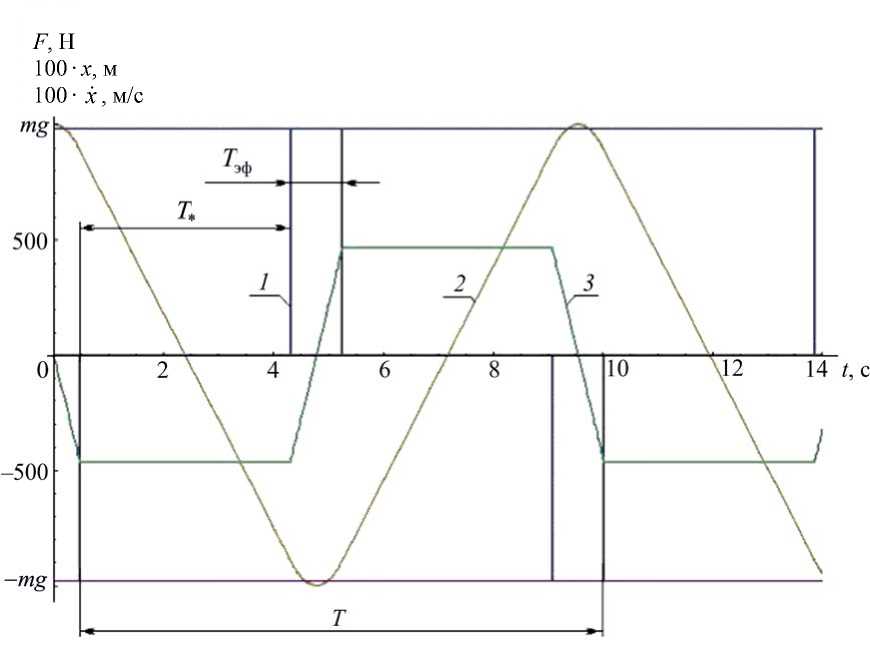
Рис. 2. Зависимости от времени параметров колебательной системы, имеющей силовую характеристику, изображенную на рис. 1, а , при перегрузке k = 1. Восстанавливающая сила (кривая 1 ), перемещение кабины с космонавтом (кривая 2 ) и ее скорость (кривая 3 ) получены численным решением дифференциального уравнения (1) при x * = – 8,9 м; x 10 = 10 м; H = 2 ⋅ 10 = 20м;
T = 9,5 c; T *. ≈ 3,9 с; T * / T эф ≈ 3,65;ω ср ≈ 0,81 с - 1
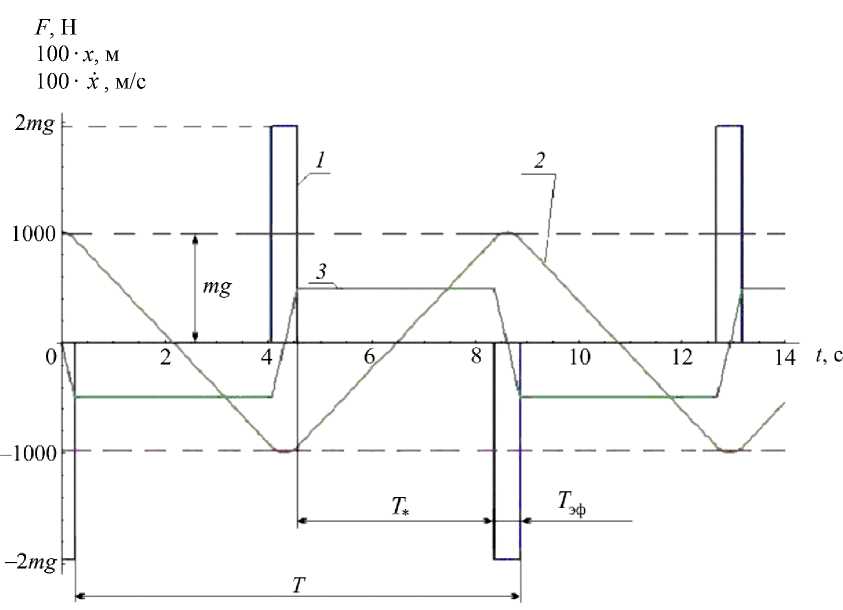
На рис. 3 представлены зависимости восстанавливающей силы, перемещения кабины с космонавтом (100 ■ x ( t )) и ее скорости (100 ■ X ( t )) от времени, полученные решением дифференциального уравнения (1) при перегрузке k = 2 из условия сохранения той же угловой скорости разворота ωср ≈ 0,81 с - 1 на участке (– x * , …, x *) . Как видно из рис. 2 и 3, отношение T * / T эф , где T эф – время воздействия заданной перегрузки, при увеличении коэффициента k в два раза также увеличилось примерно в два раза.
Зависимости начальных отклонений x 10 ( 1 – k = 1; 3 – k = 2), представленные на рис. 4 и построенные по решениям дифференциального уравнения (1) из условия сохранения средней угловой скорости разворота на участке (– x * , …, x * ) (см. рис. 1), оказались практически линейными. Отношения T * / T эф ( 2 – k = 1; 4 – k = 2), при том же условии сохранения средней угловой скорости вращения ωср , также почти линейно уменьшаются с увеличением x *.
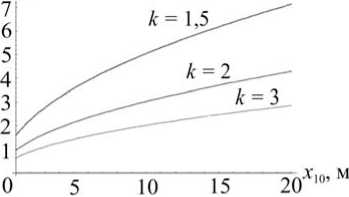
На рис. 5 представлены зависимости отношений T * / T эф от коэффициента перегрузки k , построенные по решениям дифференциального уравнения (1). Как видно из рис. 5, при x 10 = 5 м отношение T * / T эф резко увеличивается при увеличении перегрузки k , при x 10 = 15 м отношение T * / T эф практически не зависит от перегрузки.
F , Н
100 ∙ x , м
100 • X , м/с
-1000
-2mg
Рис. 3. Зависимости от времени параметров колебательной системы, имеющей силовую характеристику, изображенную на рис. 1, а , при перегрузке k = 2. Восстанавливающая сила (кривая 1 ), перемещение кабины с космонавтом (кривая 2 ) и ее скорость (кривая 3 ) получены численным решением дифференциального уравнения (1) при x * = – 9,38 м; x 10 = 10 м; H = 2 ⋅ 10 = 20 м;
T = 8,6 c; T *. ≈ 3,9 с; T * / T эф ≈ 7,8;ω ср ≈ 0,81 с - 1
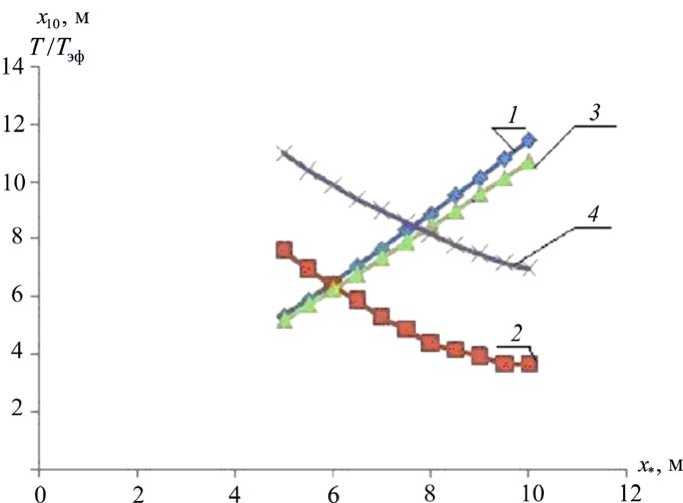
Рис. 4. Зависимости начальных отклонений кабины с космонавтом x 10 ( 1 , 3 ) и отношений Т * / Т эф ( 2 , 4 ) от величины х 0 , определяющей длину участка разворота
(- x * , ..., x *), при условии сохранения средней скорости разворота ыср ® 0,81 с 1 (получены численным решением дифференциального уравнения (1) по зависимостям типа тех, что представлены на рис. 2, 3); 1 , 2 - к = 1; 3 , 4 - к = 2;
-
1 , 3 - x io ( x * ); 2 , 4 - Т * / Т эф ( x * ); 1 , 2 - к = 1; 3 , 4 - к = 2
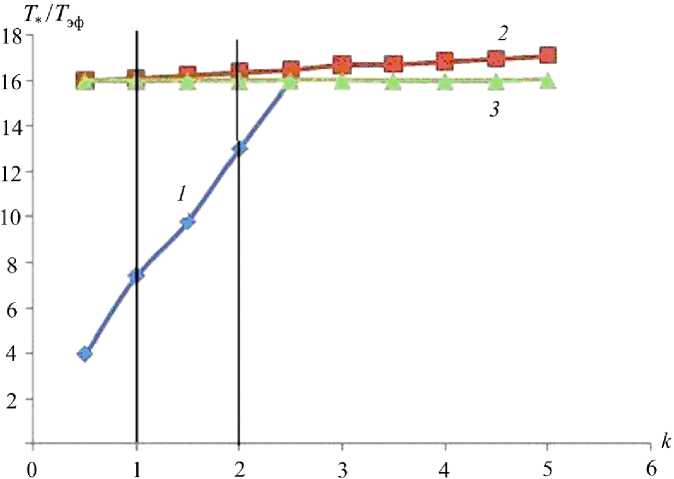
Рис. 5. Зависимости отношений Т * / Т эф от перегрузки к при условии сохранения средней скорости разворота ( ыср ® 0,81 с - 1; 1 - х 10 = 5 м; 2 - х 10 = 10 м; 3 - х 10 = 15 м; получены численным решением дифференциального уравнения (1) по зависимостям типа тех, что представлены на рис. 2, 3). Т * / Т э ф ( к ): 1,2 , 3 - х 10 = 5 м; х 10 = 10 м; х 10 = 15 м соответственно
Получение повышенных перегрузок ( k > 1) при помощи колебательных систем, имеющих силовую характеристику, изображенную на рис. 1, а , может оказаться недостаточно эффективным из-за больших значений T * / T эф : доля времени воздействия перегрузки по отношению к общему периоду колебаний при увеличении T * / T эф уменьшается, например для k = 2 при х 10 = 5 м – T * / T эф ≈ 13; при х 10 = 15 м – T * / T эф ≈ 16.
При свободных колебаниях упругих систем, имеющих силовую характеристику, изображенную на рис. 1, б , задаваемая восстанавливающая сила k 1 ∙mg , имитирующая силу тяжести, действует на космонавта в течение части периода колебаний (правая часть силовой характеристики). Разворота в данном случае не происходит. После плавного прохождения нулевого положения (участок СВ ) на космонавта будет действовать восстанавливающая сила k 2 ∙mg , противоположная по отношению к k 1 ∙mg (левая часть характеристики). Силовая характеристика в этом случае (см. рис. 1, б ) также была выражена аналитической функцией. Дифференциальное уравнение, описывающее свободные нелинейные колебания в этом случае, следующее:
mx = - ( k10 • m • g • th[ k 3 • x ] + k 20 • m • g • th[ k 4 • x ] • sign[ x ]), (2)
где k 10 , k 20 – коэффициенты, определяющие восстанавливающие силы на участках CD и АВ соответственно; k 1 = k 10 + k 20 ; k 2 = k 10 – k 20 (см. рис. 1, б ); k 3 = 1; k 4 = 0,8 – коэффициенты, определяющие форму и размеры участка ВС (рис. 1, б ).
Начальные условия дифференциального уравнения (2): x 0 = x 10; 5c0 = 0.
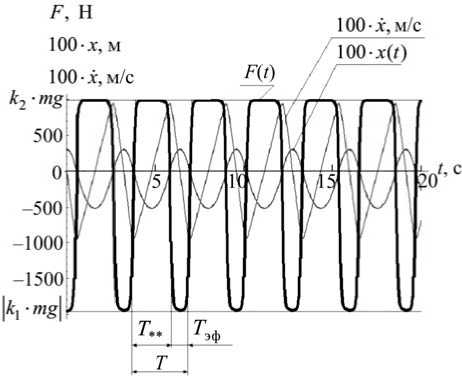
Пусть m = 100 кг; k 1 = 2; k 2 = 1 ( k 10 = 1,5; k 20 = 0,5) . На рис. 6 представлены зависимости восстанавливающей силы F ( t ), действующей на кабину с космонавтом, ее перемещения (100 • x ( t )) и скорости (100 • jc( t )) от времени. Для варианта а - T ** / T эф ≈ 2, где T ** – время действия силы k 2 ∙mg ; T эф ≈ 2 с; T ≈ 6с ; для варианта б – T ** / T эф ≈ 1,8; T эф ≈ 1,1 с; T ≈ 3,1с.
Изменяя коэффициенты k 1 и k 2 (о том, как это принципиально сделать, будет сказано ниже), можно получать заданное отношение T ** / T эф . Вид восстанавливающей силы при этом будет такой же, как на рис. 6. При изменении величины начального смещения х 10 можно получить заданные абсолютные значения T , T **, T эф . При помощи колебательных систем, имеющих силовые характеристики, представленные на рис. 1, б , можно получать более высокие перегрузки по сравнению с системами, имеющими силовые характеристики, представленные на рис. 1, а .
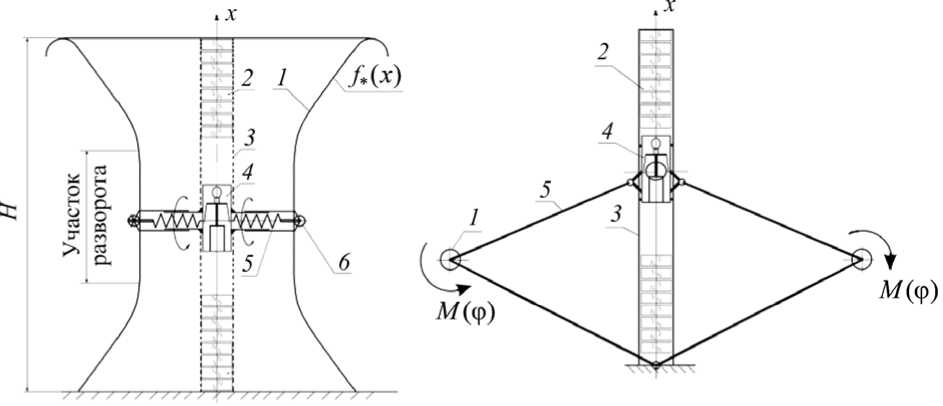
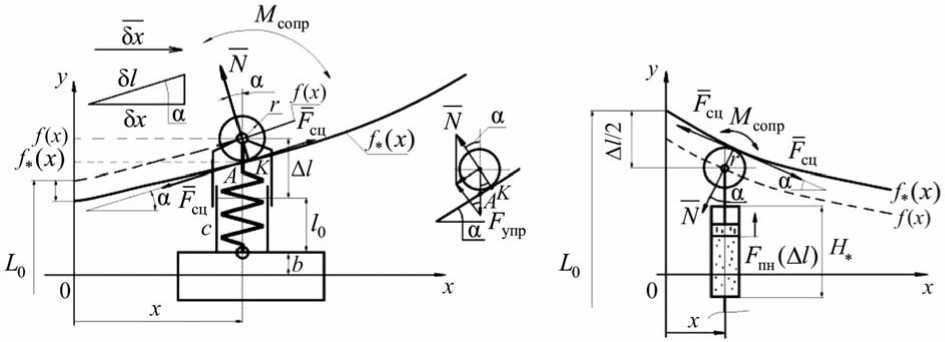
Для получения конструкций систем, имеющих силовые характеристики, изображенные на рис. 1, предполагается использовать колебательные системы на основе упругого элемента, перемещающегося между двумя направляющими расчетной формы [11] (рис. 7, а ), или колебательные системы на основе упругих шарниров с заданными угловыми силовыми характеристиками (рис. 7, б ) [4].
Поскольку для получения искусственной гравитации предлагаемыми методами рассматриваются свободные колебания, то для компенсации диссипативных сил предлагается, в частности, использовать цепочку электромагнитов (см. рис. 7), аналогично тому, как это делается в поездах на магнитной подушке [5]. Другими способами компенсации диссипативных сил могут быть использование возмущающей силы и даже мускульной силы самого космонавта (как на качелях).
Рассмотрим конкретный пример. Рассчитаем форму направляющих f ( x ) (при условии, что радиус роликов равен нулю; f * ( x ) – функция, определяющая форму направляющих для реального случая, когда радиус роликов не равен нулю) для
а
Рис. 6. Зависимости восстанавливающей силы F ( t ), действующей на кабину с космонавтом, ее перемещения (100 • x ( t )) и скорости (100 • x ( t )) от времени ( m = 100 кг; k 3 = 1; k 4 = 0,8; k 10 = 1,5; k 20 = 0,5; k 1 = 2; k 2 = 1; а – x 10 = 10 м; Т ** / Т эф - 2 ; б — X 10 = 3 м; Т ** / Т эф - 1,8 ; Т = Т эф + Т ** - период колебаний; T эф – время действия восстанавливающей силы k 1 ∙ mg ; T **. – время действия восстанавливающей силы k 2 ∙ mg )
б
б
а
Рис. 7. Схемы конструкций для получения силовых характеристик, представленных на рис. 1; а – при помощи продольных направляющих расчетной формы: 1 – направляющие; 2 – электромагниты; 3 – направляющие кабины; 4 – кабина с космонавтом; 5 – упругий элемент (пружина); 6 – ролик; б – при помощи упругих шарниров с заданными силовыми характеристиками: 1 – упругий шарнир с заданной угловой силовой характеристикой M (φ) ; 2 – электромагниты;
3 – направляющие кабины; 4 – кабина с космонавтом; 5 – стержни
варианта системы, представленной на рис. 8, а , при следующих данных: m = 100 кг; k 1 = 2; k 2 = 1 ( k 10 = 1,5; k 20 = 0,5); x 10 = 10 м; силовая характеристика определяется функцией F ( x ) = - ( k10 • m • g • th[ k 3 • x ] + k 20 • m • g • th[ k 4 • x ] • sign[ x ]).
Приведем расчет на одном этапе, когда координата х изменяется от 0 до 10 м. Зная на данном этапе восстанавливающую силу F ( x ) (здесь она
F ( x ) = k 1 0 • m • g • th[1 • x ] + k 20 • m • g • th[0,8 • x ], см. рис. 1, б ), можно рассчитать функцию fx ), определяющую форму направляющих 1 (см. рис. 7, а ). Зависимость между ними следующая [11]:
∂ П
F ( x ) = —, (3)
дх где П - потенциальная энергия упругого элемента (в данном случае пружины, см. рис. 8, а), П = с • (f (x) -l0 - b)2; с - коэффициент жесткости пружины; l0 - длина ненапряженной пружины; b - const.
Подставим функции F ( x ) и П( х ) в формулу (3) и определим f ( x ):
k 10 • m • g • th[1 • x ] + k 20 • m • g • th[0,8 x ] = [ с ( f ( x ) —-—^)-],
∂х кю • m • g • th[x] + k20 • m • g • th[0,8x] = 2 • с • (f (x) -10 - b) • f ‘(x), k10 • m ■ g • th[x]dx + k20 • m • g • th[0,8x]dx = 2 • c • f (x)df (x) - 2 • c • 10 df (x) - 2 • c • b df (x).
Проинтегрировав последнее выражение, получим k10 • m • g • ln[ch[x]] + k20 • m ■ g • 1,25 • ln[ch[0,8x]] = = c• f 2(x)-2• c• 10 • f (x)-2• c• b• f (x) + C0.
Определим постоянную интегрирования Со. При х = 0: f (x) = L0 / 2 (см. рис. 8, а), тогда Cо = c ■ 10 • L0 + c ■ b ■ L0 - c ■ (L02 / 4). Подставляя это выражение в (4), получим k10 • m • g • ln[ch[x]] + k20 • m • g • 1,25 • ln[ch[0,8x]] =
= c • f 2( x ) - (2 • c • 1 0 + 2 • c ■ b ) • f ( x ) + c • 1 0 • L 0 + c • b • L 0 - c • ( L 02/4). ( 5)
Окончательно имеем f (x) = (10 + b) + 4(b +10)2 - D / c, (6)
где D = ( c • 1 0 • L 0 + c • b • L 0 - c • L 02 /4) - k 10 • m • g ln[ch[ x ]] - 1,25 • k 20 • m • g • ln[ch[0,8 x ]].
а
б
Рис. 8. Схемы конструкций с направляющими для упругого элемента. Упругие элементы: а - пружина; б - пневмопружина)
Для оценки потерь на трение при движении роликов по направляющим найдем форму направляющих, которая определяется функцией f,(x) , с учетом радиуса ролика r (см. рис. 7, а; 8). Задавая 10 = 0,5 м; L0 = 3,4 м; b = 0,4 м; с = 5000 H/м; r = 0,1 м, по формуле (6) получаем зависимость f (x) (рис. 9). Эквидистантную к ней кривую можно получить по формуле f* (x) = f (x) - r / cos[a] или f,(x) = f (x)-r• V1 + [f‘(x)]2 .
Обобщенная сила сопротивления по возможному перемещению 8 х (равная силе трения Rx ( x ) , см. рис. 8, а ):
2 • M c • 8a = - 2 • р • N ( x ) • 8 1 = - 2 • р • N ( x ) • 8 x = - 2 • р • N ( x )
8 x r • 8 x r • 8 x • cos(a) r • cos(a)
где M c - момент сопротивления, M c = р • N ( x ); р - коэффициент трения качения; N ( x ) = с •A 1 • cos(a); A 1 = f ( x ) - 1 0 - b .
Окончательно имеем
2 • р • с •(f (x)-10 - b) •cos(a) 2 • р • с •(f (x)-10 - b)
=- r •cos(a) r
Зная функцию fx ), определяемую по формуле (6), находим мощность сил сопротивления на участке действия перегрузки к 1 • mg .
2J' R x dx 2 р^ с Ч f ( x )-^ - b ) dx
N 1 = -J°Tr_=--------Tr -----------’ <10 )
где r = 0,1 м; р - коэффициент трения качения: закаленная сталь по закаленной стали, р « 10 - 6 м; x 10 = 10 м; T - время движения по правой ветви силовой характеристики
(см. рис. 1, б ), T 1 = Т эф = 2 с (см. рис. 6, а ).
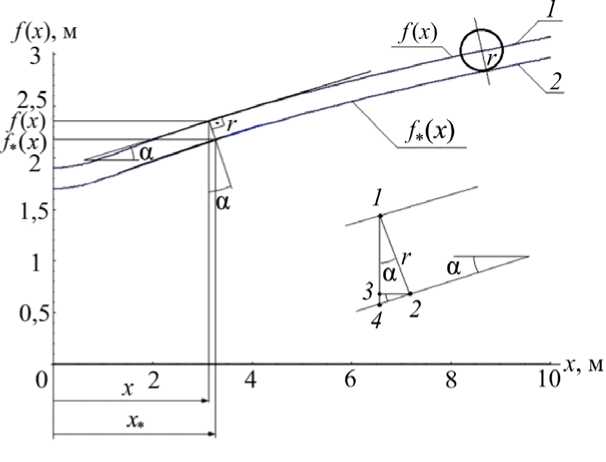
Рис. 9. Формы направляющих ( f ( x ); f , ( x )) для части силовой характеристики ( F 1 (x ) = к10 -m-g 4h[ x ] + к 20 • m ^ g • th[0,8 x ] ), полученные по формулам (6) и (7); 1 0 = 0,5 м; L 0 = 3,4 м; b = 0,4 м; с = 5000 H/м; r = 0,1 м
Интеграл 2⋅µ⋅с ⋅(f(x)-l0 -b)dx ≈ 1,47 Дж был определен численным
0r интегрированием, т.е. мощность сил сопротивления невелика, даже учитывая коэффициент полезного действия и то, что движение осуществляется только по левой ветви силовой характеристики (мощность некоторых центрифуг, используемых для тренировки космонавтов, составляет десятки мегаватт).
Искусственную силу тяжести применяют и в земных условиях в качестве гравитационной терапии [6], для чего используют центрифуги малого радиуса действия со всеми вышеописанными принципиальными недостатками. Колебательная система, имеющая силовую характеристику, изображенную на рис. 1, б , предполагается перспективной для использования ее при гравитационной терапии.
Определим аналитически функцию f ( x ) для вертикальной системы, изображенной на рис. 7, а , имеющей силовую характеристику, изображенную на рис. 1, б , без учета участка перехода ВС . Рассмотрим движение по участкам. На участке АВ движение описывается следующим дифференциальным уравнением:
mX I = mg .
Начальные условия для этого дифференциального уравнения x 0 = x 10; X 0 = 0.
На участке CD колебания описываются дифференциальным уравнением mXII = -kmg + mg, (12)
где kmg – модуль восстанавливающей силы, действующей на объект массой m (кабина с человеком); k – задаваемый коэффициент.
Начальные условия для дифференциального уравнения (12): x о = 0; X = V 2 • g • xto .
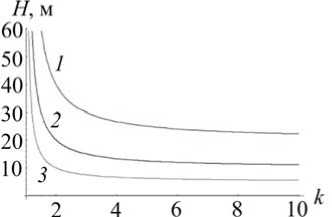
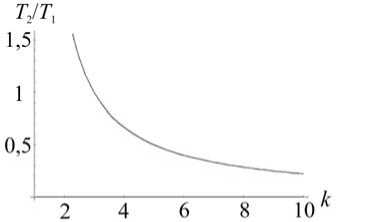
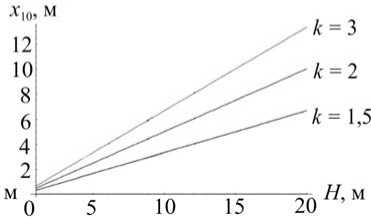
При решении дифференциальных уравнений (11), (12) получены зависимости, представленные на рис. 10.
Для предлагаемых систем, имеющих заданные силовые характеристики, в качестве упругого элемента можно использовать не только пружины, но и пневмопружины (см. рис. 8, б ). Для определения функции f ( x ) здесь можно воспользоваться следующим соотношением:
∆ lx
- ∫ F пн( ∆ l ) d ∆ l = ∫ F ( x ) dx , (13)
p⋅S⋅Hn где F = 0 – сила упругости пневмопружины; n – показатель политропы,
(H* -∆l)n n = 1; 3 [9]; H* – осевая длина цилиндра пневмопружины в несжатом состоянии; S – площадь поршня пневмопружины; p0 – начальное давление в пневмопружине; L0 – длина пневмопружины в несжатом состоянии (см. рис. 8, б); ∆l=2(L0/2- f(x))=L0-2⋅ f(x); d∆l = -2df(x).
Уравнение (13) можно переписать следующим образом:
-
∆ lp 0 ⋅ S ⋅ H * n d ∆ l = xF ( x ) dx .
∫ 0 ( H * -∆ l ) n ∫ 0
Л с
б
в
г
Рис. 10. Зависимости, полученные решением дифференциальных уравнений (11),
(12): а
k зависимость величины H = x10 • , определяющей габариты к -1
конструкции (см. рис. 1, б ; рис. 7, а ), от коэффициента перегрузки к ; б -
T / T = — от к ; в - T = ^x" + 21 к - 1 g g
2 • У2 • g • x 10 g • ( к - 1)
от x 10 ; г - x 10 =
H • ( к - 1) k
от H
Определим f(x) для случая, когда F(x) = R^mg, где к - коэффициент, определяющий величину заданной постоянной силы F(x). Проинтегрировав уравнение (14), получим p0 • S • H*n (H* - L0 + 2 • f (x))1-n - p0 • S • H* = к • mgx • (n -1). Окончательно имеем f (x) = 0,5 • ((
к • m • g • x • (n -1)
p 0 • S • H * n
+ H * 1 - n )1/(1 - n ) + L 0 - H * ).
С учетом радиуса роликов r (см. рис. 8, б ) функцию f . ( x ) можно определить по формуле, аналогичной формуле (7):
f * ( x ) = f ( x ) + r • V 1 + [ f '( x )]2. (16)
Для пропорционального изменения постоянной восстанавливающей силы F ( x ) в системе, изображенной на рис. 8, а , достаточно поменять пружину с одним коэффициентом жесткости на пружину с другим коэффициентом жесткости (6); в системе, изображенной на рис. 8, б , достаточно изменить начальное давление в пневмопружине (16).
Для систем, схема которых изображена на рис. 7, б , предлагается использовать упругие шарниры с заданной угловой силовой характеристикой M (ф) (см. рис. 7, б ; рис. 11), которая подбирается таким образом, чтобы получить заданные линейные силовые характеристики F ( x ) (см. рис. 1).
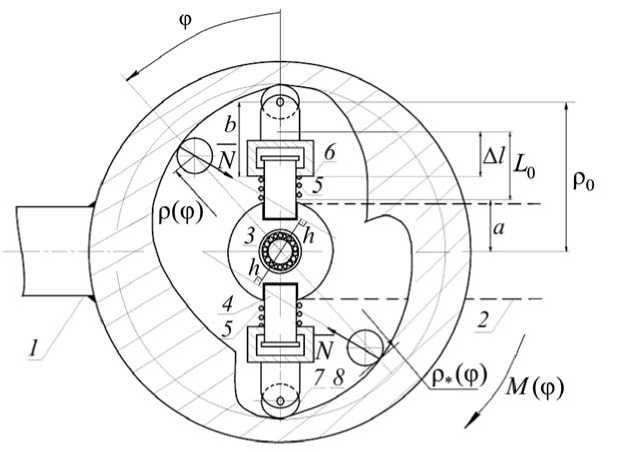
Рис. 11. Схема упругого шарнира с заданной угловой силовой характеристикой M (φ)
Стержень 1 соединен со стержнем 2 через упругую связь. В центре шарнира расположен подшипник 3, внутреннее кольцо которого связано с одной частью шарнира, наружное – с другой, в которой расположены направляющие пружин 4. На них насажены пружины 5. С пружинами контактируют держатели роликов 6. Сами ролики 7 перемещаются по направляющим 8 заданной формы. Реакции N не проходят через центр шарнира и создают момент M^ (ф) = 2 • N • h (от двух реакций - система симметрична).
Пусть задана угловая силовая характеристика M ^ (ф) = 2 M (ф). Требуется определить форму направляющей 8 для этой характеристики. Трение не учитывается.
При повороте одной части шарнира по отношению к другой на угол φ (от вертикали, см. рис. 11) момент сопротивления системы для одной пружины определяется по следующей формуле (радиус ролика 7 принят равным нулю):
M (ф) = —
дП дф ,
с 2
где П - потенциальная энергия одной пружины, П = 2 (Al) , Al - изменение пружины при повороте для данной схемы упругого шарнира, Al = (a + L0 + b - p).
Формулу (17) можно переписать:
M (ф) = c • (a + L + b - p) d-, dφ длины
где a , b – постоянные величины (см. рис. 11); L 0 – длина ненапряженной пружины; ρ – расстояние от центра роликов 7 до центра шарнира.
Теперь, задавая функцию M (φ) и решая дифференциальное уравнение (18), можно получить зависимость ρ(φ) . При учете радиуса r ролика 7 (см. рис. 11) необходимо построить эквидистантные к данным кривые.
Рассмотрим пример. Требуется подобрать такую угловую силовую характеристику M (φ) упругого шарнира (рис. 12, а ), чтобы общая силовая характеристика системы была заданной: F(y ) = 1000 Н - const ( l = 0,5 м).
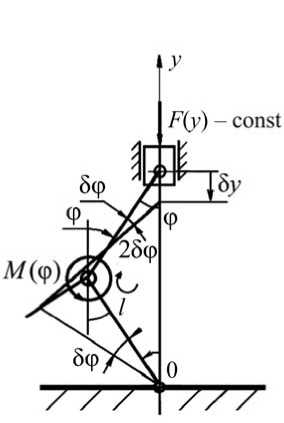
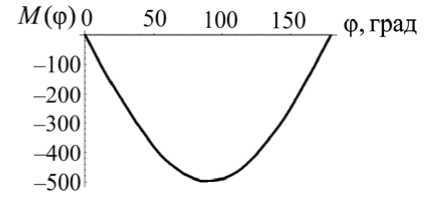
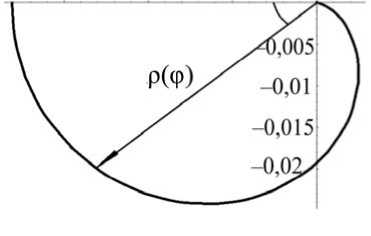
Рис. 12. Использование упругих шарниров с заданной угловой силовой характеристикой M (φ) для создания искусственной силы тяжести; F = 1000 H; l = 0,5 м; с = 100 000 Н/м: а - схема использования двух упругих шарниров с заданными угловыми характеристиками; б – угловые характеристики шарнира; в – форма направляющих для упругого элемента пружины
Решение выполним, приравняв к нулю обобщенную силу по возможному перемещению δ y :
_ F • 5 у - M • 25ф _
Q 5 у = 5 у "
Выразим 5ф через 5у (5ф = 5у / 2l sin а ) и подставим в уравнение (19). Сократив на 5у, получим M = F • l • sin ф (рис. 12, б). Теперь можно определить р(ф) по формуле (18), пусть a = 0,03 м; L0 = 0,05 м; b = 0,04 м; р0 = 0,1 м . Подставим в формулу (18) выражение M (ф) / 2: F • l • sin ф/2 = c •( a + L 0 + b - р) —. Решая последнее dφ дифференциальное уравнение, получим р = 0,12 ± 7 (0,12)2 + 500 • (1 + cos ф)/ c.
На рис. 12, в показана зависимость ρ(φ), построенная по формуле (20) (угол φ изменяется от 0 до 180 град; с = 100 000 Н/м).
Заключение
Идея использовать повышенные перегрузки во время длительных космических полетов для профилактики вредного влияния на организм невесомости может оказаться очень перспективной, а предложенные в статье для этой цели колебательные системы с квазинулевой жесткостью (квазипостоянной восстанавливающей силой) на базе упругого элемента, перемещающегося между направляющими заданной формы, весьма эффективными.
Для более полного понимания данной проблемы, нахождения параметров заданных колебаний необходима серия экспериментов как в земных условиях, так и в космосе.
Предлагаемые колебательные системы могут найти широкое применение и в гравитационной терапии как более перспективные и дешевые по отношению к известным центрифугам.
Благодарности
Работа выполнена при поддержке гранта Российского фонда фундаментальных исследований (№ 12-08-97026-р_поволжье_а).
Список литературы Создание искусственной силы тяжести при помощи колебательных систем, имеющих силовые характеристики с участками квазинулевой жесткости
- Алабужев П.М., Гритчин А.А. Виброзащитные системы с квазинулевой жесткостью/под ред. К.М. Рагульскиса. -Л.: Машиностроение, 1986. -С. 96.
- Вареник Е.Н. Ультраструктурные изменения желудочковых и предсердных кардиомиоцитов при моделировании эффектов космического полета: автореф.. дис. канд. биол. наук. -М., 2012. -27 с.
- Волегов А.И. О возможности компенсации невесомости и гипогравитации путем инерционных воздействий и самовоздействий. -М., 2004. -66 с.
- Зотов А.Н. Упругие шарниры с заданными силовыми характеристиками//Математическое моделирование механических явлений: материалы всерос. науч.-техн. конф., 17-18 мая 2013 г. -Екатеринбург, 2013. -С. 61-65.
- Зотов А.Н., Валеев А.Р., Имаева Э.Ш., Тихонов А.Ю. Создание искусственной гравитации при помощи колебательных систем с квазинулевой жесткостью//Фундаментальные проблемы теоретической и прикладной механики. Вестник Нижегород. ун-та им. Н.И. Лобачевского. -2011. -№ 4 (5). -С. 2051-2052.
- Котельников Г.П., Яшков Я.В., Махова А.Н., Макаров И.В., Котельников М.Г. Экспериментальное обоснование гравитационной терапии: монография. -М.: Медицина, 2005. -280 с.
- Краснов И.Б., Дьячкова Л.Н. Морфология головного мозга крыс во время и после космического полета: ультраструктура синего пятна//Авиакосмическая и экологическая медицина. -2003. -Т. 37, № 1. -С. 18-24.
- Оганов В.С. Состояние костной ткани//Орбитальная станция «Мир». Космическая биология и медицина: в 2 т. Т. 1. Медицинское обеспечение длительных полетов. -М.: Аником, 2001. -C. 391-412.
- Пановко Я.Г. Основы прикладной теории колебаний и удара. -Л.: Политехника, 1990. -С. 272.
- Проблема невесомости: искусственная гравитация за счет вращения [Электронный ресурс]. -URL: www.astronomynow.com (дата обращения: 03.07.2013).
- Zotov A.N. Systems with quasi-zero-stiffness characteristic [Электронный ресурс]//Proceedings of 6th Euromech Nonlinear Dynamics Conference (ENOC 2008), 30 June -4 July 2008. -Saint Petersburg, 2008. -URL: www.lib.physcon.ru/file?id=23d320ca5d2b (дата обращения: 03.07.2013).
