Создание виртуальной среды испытаний подводного робототехнического комплекса на основе цифрового двойника

Автор: Рыбаков А.В., Гладышев М.Д.
Рубрика: Информатика и вычислительная техника
Статья в выпуске: 2, 2025 года.
Бесплатный доступ
Статья посвящена разработке виртуальной среды испытаний подводного робототехнического комплекса с использованием цифрового двойника. Представлена архитектура системы, реализующая моделирование поведения подводного робототехнического комплекса, визуализацию в Unity и запуск тестовых сценариев. Описаны алгоритмы управления, обработки сенсорных данных и оценки поведения в условиях подводной среды. Работа направлена на повышение точности, надёжности и эффективности автономного функционирования подводного робототехнического комплекса за счёт предварительной виртуальной отладки.
Робототехника, подводный робототехнический комплекс, моделирование, цифровой двойник, тестирование
Короткий адрес: https://sciup.org/148331181
IDR: 148331181 | УДК: 519.688 | DOI: 10.18137/RNU.V9187.25.02.P.158
Creation of a virtual testing environment for an underwater robotic complex based on a digital twin
The article addresses the development of a virtual testing environment for an underwater robotic complex using a digital twin. The article presents an architecture of the system that implements modeling of the underwater robotic complex behavior, visualization in Unity and launching test scenarios. Algorithms for control, processing of sensory data and behavior assessment in underwater conditions are described. The work is aimed at improving the accuracy, reliability and efficiency of autonomous operation of the underwater robotic complex due to preliminary virtual debugging.
Текст научной статьи Создание виртуальной среды испытаний подводного робототехнического комплекса на основе цифрового двойника
Современные автономные подводные робототехнические комплексы (далее – ПРТК) находят широкое применение в инженерных задачах, связанных с прокладкой подводных линий связи, мониторингом морского дна, инспекцией объектов и обслуживанием глубоководной инфраструктуры. Их функционирование сопряжено с воздействием факторов нестабильной подводной среды: высокой инерционностью, ограниченной видимостью, невозможностью прямой радиосвязи, а также значительным влиянием внешних возмущений (течения, неоднородность плотности воды, изменения освещения, геометрии дна). Всё это существенно затрудняет процессы испытаний, отладки и верификации алгоритмов управления, делая невозможным полное тестирование решений исключительно в физической среде.
Цифровой двойник (далее – ЦД) в контексте ПРТК представляет собой синтетическую модель, объединяющую математическое описание динамики робота, структуру его системы управления, а также каналы связи с сенсорными данными и внешней средой [1–3]. Использование цифрового двойника позволяет в условиях цифровой симуляции протестировать функциональные блоки автономного комплекса, оценить корректность выполнения алгоритмов позиционирования, траекторного управления, реакции на сбои сенсоров и внешние возмущения [4–6]. Кроме того, цифровая среда позволяет проводить многовариантное тестирование с заданным набором начальных условий и сценариев, что важно для системного анализа устойчивости и надёжности поведения ПРТК.
Сложность подводной среды, ограниченность доступа к реальным объектам, высокая стоимость натурных экспериментов и важность безопасности при выполнении миссий формируют актуальный научно-практический запрос на разработку интегрированной цифровой среды, обеспечивающей виртуальное тестирование автономных подводных систем с высокой степенью достоверности.
Цель исследования – разработка и описание архитектуры виртуальной среды испытаний подводного робототехнического комплекса на основе цифрового двойника, включающей в себя механизмы сценарного тестирования, моделирования поведения в условиях подводной среды и систему оценки отклонений между цифровой и реальной моделью.
Для достижения указанной цели в рамках статьи решаются следующие задачи:
-
• формализация архитектуры цифровой среды с позициями теории управления;
-
• описание структуры цифрового двойника ПРТК и его интеграции с сенсорными данными;
-
• разработка сценариев тестирования автономного поведения;
-
• построение критериев оценки соответствия поведения цифровой и физической моделей;
-
• проведение анализа и визуализации поведения робота в виртуальной среде с использованием Unity.
Вестник Российского нового университета
Серия «Сложные системы: модели, анализ и управление», выпуск 2 за 2025 год
Виртуальная среда испытаний подводного робототехнического комплекса представляет собой комплексную программную систему, включающую цифровой двойник ПРТК, модели подводной среды и механизмов её воздействия, систему сбора и интеграции сенсорных данных, а также модуль визуализации и анализа результатов. В логике системного подхода данную структуру можно представить в виде иерархической многоуровневой архитектуры, где каждый уровень отвечает за отдельный аспект управления, восприятия или моделирования внешней среды. Систему можно формально описать как многокомпонентную модель вида
S = { MCD , MENV , MIO , MCTRL , MVIS } , (1)
где M CD – модель цифрового двойника ПРТК; MENV – модель подводной среды; MIO – модуль обмена данными (сенсоры/робот О- симулятор); MCTRL - модель управляющей подсистемы; MVIS – модуль визуализации и анализа результатов.
Модель цифрового двойника ПРТК ( MCD ) включает описание кинематической и динамической модели ПРТК, реализованной в программной среде. Динамика представлена в виде системы дифференциальных уравнений
x ( t ) = f ( x ( t ) ) , u ( t ) , w ( t ) ), (2) где x ( t ) - вектор состояния (положение, скорость, ориентация); u ( t ) - управляющее воздействие; w ( t ) – внешние возмущения, включая модель среды.
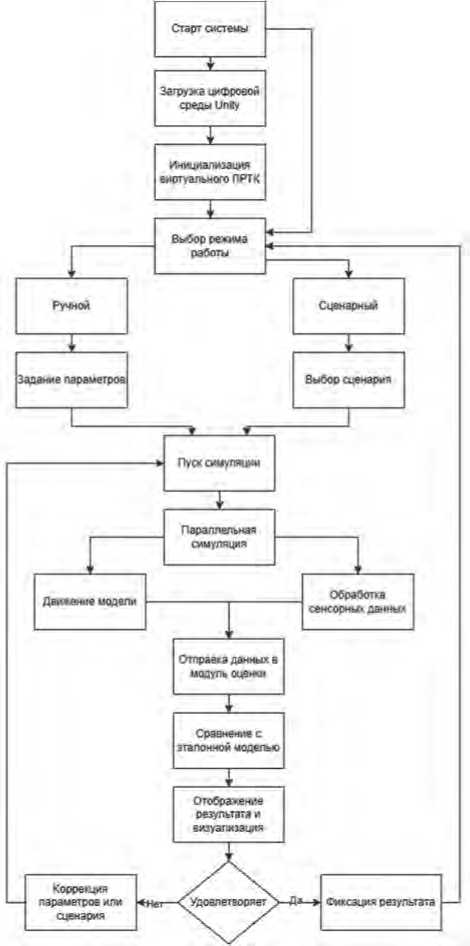
Реализация производится на уровне численного интегратора с фиксированным шагом в среде Unity + C#, с параллельной передачей параметров из реального устройства (см. Рисунок 1).
Модель подводной среды ( MENV ) представлена как модифицируемая цифровая карта с параметрами плотности воды, сил сопротивления, ограничений движения и внешних полей. Возмущающие воздействия моделируются как стохастические или гармонические процессы:
w ( t ) = A sin ( wt + p ) + n ( t ) , (3) где n ( t ) - белый шум, моделирующий непредсказуемые колебания; A , w p - параметры текущего возмущающего воздействия.
Модуль обмена данными ( MIO ) отвечает за интеграцию сенсорных данных с физического макета ПРТК: данные акселерометра, гироскопа, энкодеров, вольтметра, амперметра. Передача данных осуществляется через COM-порт в режиме реального времени. Протокол связи синхронизирован с цифровой моделью. Возможно задание сценариев офлайн-режима с заранее сохранёнными сессиями.
Управляющая подсистема ( MCTRL ) реализует алгоритмы позиционирования и стабилизации в пространстве. Используется принцип дискретного ПИД-регулирования:
u ( t ) = Kpe ( t ) + Ki J 0 e (T) d т + ^~~^ , (4) где e ( t ) – ошибка между текущим и заданным положением. Контроллер формирует команду движения на основе цели, поступившей из интерфейса пользователя.
Модуль визуализации и анализа ( MVIS ) – разработка визуального интерфейса ведётся в Unity, с применением прозрачных моделей для отображения разницы между реаль-
Создание виртуальной среды испытаний подводного робототехнического комплекса на основе цифрового двойника ным и цифровым поведением. Система отображает координаты, угол наклона, направление движения, графики ошибок и векторы отклонений.
Удовлетворяет
Старт системы
ZZTZ
Jarpyxa цифровой среды unity
J ~
Инициализация виртуального ПРТ К
Выбор режима работы
Отправка данных в модуль смети
Сравнение с эталонной моделью
I
Отображение результата и визуализация
Сценарный i '
Выбор сценария
Пуск симуляции
I
Параллельная симуляция
Ручной
I
Задание параметров
Фиксация результата
Движение модели
Обработка сенсорны* данные
Коррекция параметров или сценария
Рисунок 1. Алгоритм работы программы визуализации Источник: рисунок выполнен авторами.
В дальнейшем будут также внедрены так называемые сценарии испытаний (см. Таблицу 1). В виртуальной среде часто требуется формализации поведения ПРТК на основе за-
Вестник Российского нового университета
Серия «Сложные системы: модели, анализ и управление», выпуск 2 за 2025 год ранее определённых задач и условий подводной среды. Использование цифрового двойника позволяет выполнять тестовые миссии с различными исходными параметрами, что даёт возможность исследовать реакцию системы управления на изменяющиеся внешние и внутренние воздействия, включая влияние течений, препятствий, отказов сенсоров или дрейфа навигации.
Особенности автономной работы в подводной среде требуют устойчивости к частичным отказам сенсоров. В рамках симуляции реализованы следующие стратегии:
-
• идентификация отказа гироскопа – резкое отклонение показаний и переключение на альтернативный источник (акселерометр + интеграция скорости);
-
• компенсация дрейфа – калибровка по ориентирам среды или по сохранённой карте при наличии SLAM-модуля;
-
• возврат к базе – алгоритм аварийного возврата по инерциальной навигации при потере связи или ориентиров.
Таблица 1
Варианты сценариев
|
Название сценария |
Описание задачи |
|
«Дрейф и стабилизация» |
Робот стартует с начальной точки и испытывает боковое течение. Цель – удержание траектории |
|
«Обход препятствия» |
Движение по маршруту с появлением неподвижного или движущегося препятствия |
|
«Низкая освещенность» |
Искажение сенсорных данных, ухудшение видимости. Проверка алгоритмов ориентации |
|
«Потеря ориентации» |
Искусственное повреждение гироскопа или компаса. Необходимость компенсации на основе других сенсоров |
|
«Следование по траектории» |
Работа по заранее заданной криволинейной траектории (например, вдоль трубопровода) |
Источник: таблица составлена авторами.
В дальнейшем разработка и реализация сценариев в цифровой среде испытаний позволят выявить чувствительность алгоритмов к различным типам нарушений. Использование цифрового двойника даёт возможность отрабатывать поведение ПРТК в сложных ситуациях без необходимости проведения дорогостоящих реальных испытаний. Созданные алгоритмы перемещения, стабилизации и обработки ошибок могут быть масштабированы и интегрированы в реальные системы управления.
Одним из ключевых аспектов построения цифрового двойника является его верификация – сопоставление поведения цифровой модели с реальными характеристиками физического объекта. В контексте систем управления под верификацией понимается проверка структурной и параметрической идентичности моделей: структура математического описания должна адекватно отражать динамику, а параметры – приближены к реальным. Для оценки адекватности цифрового двойника ПРТК в данной работе использован сравнительный анализ откликов системы на идентичные управляющие воздействия:
А У ( t ) = У реал ( t ) - У модель ( t ) , (5)
Создание виртуальной среды испытаний подводного робототехнического комплекса на основе цифрового двойника где урагл (t) - измеренное значение координаты или ориентации с физического ПРТК;
У модель ( t ) — соответствующее значение из цифрового двойника.
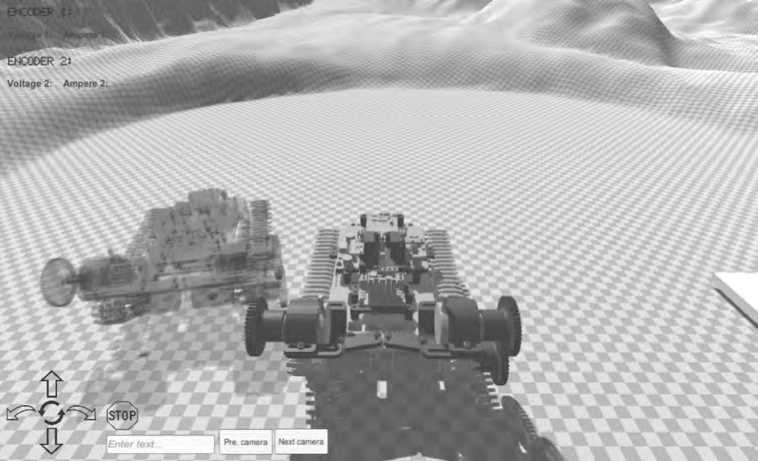
Рисунок 2. Цифровое моделирование физической и цифровой копии ПРТК Источник: рисунок выполнен авторами.
Проведены испытания с передачей реальных данных с сенсоров (акселерометр, гироскоп, энкодеры) в цифровую модель. Ниже представлена таблица погрешностей (см. Таблицу 2).
Таблица 2
Таблица погрешностей
|
Параметр |
Значение |
|
Средняя ошибка по Х |
3,11 мм |
|
Средняя ошибка по Y |
2,92 мм |
|
Средняя ошибка угла Z |
1.8о |
|
Максимальное отклонение |
5,3 мм |
|
Время реакции |
< 100 мс |
Источник: таблица составлена авторами.
Цифровой двойник не только воспроизводит физическое поведение, но и служит платформой для онлайн-коррекции параметров реального ПРТК.
В рамках данной работы реализованы:
-
• адаптация коэффициентов управления в реальном времени на основе отклонений между моделью и физическим роботом (адаптивное управление);
Вестник Российского нового университета
Серия «Сложные системы: модели, анализ и управление», выпуск 2 за 2025 год
-
• обратная передача параметров калибровки сенсоров – на основе анализа устойчивого дрейфа по акселерометру и гироскопу в цифровом двойнике;
-
• обнаружение сбоев и предиктивное оповещение на основе анализа модели отклонений (детекторы пороговых превышений и анализа частот).
Результаты моделирования и сравнительный анализ подтвердили достаточную точность модели. При этом адаптация параметров управления и механизмов калибровки позволила повысить устойчивость системы к внешним возмущениям. На основе цифрового двойника была реализована обратная связь с реальным роботом, включая механизмы адаптации, компенсирующие изменения параметров во времени. Результат работы в рамках статьи:
-
• разработан цифровой двойник с полной интеграцией сенсорных потоков;
-
• проведена верификация модели с получением RMSE менее 5 % в базовых сценариях;
-
• реализованы алгоритмы обратной связи и адаптации параметров управления;
-
• доказана применимость цифрового двойника для поддержки решений в автономных системах.
