Специфика ротационного планирования и интраоперационного размещения бедренного компонента эндопротеза коленного сустава с применением навигационных устройств

Автор: Зубавленко Р.А., Марков Д.А., Островский В.В.
Журнал: Гений ортопедии @geniy-ortopedii
Рубрика: Обзорная статья
Статья в выпуске: 4 т.31, 2025 года.
Бесплатный доступ
Введение. Оптимальное ротационное выравнивание бедренного компонента эндопротеза при использовании навигационных устройств имеет большое значение для тотальной артропластики коленного сустава. Методы измеряемой резекции и балансировки зазора представляют собой доступные интраоперационные техники, осуществляемые с помощью навигационных устройств для установки ротации бедренной кости. Однако каждый из этих методов имеет свои преимущества и недостатки. Данные аспекты способствуют активному развитию разработки навигационного инструментария для эндопротезирования крупных суставов и его клинической апробации. Цель работы — оценка эффективности определения ротационного позиционирования бедренного компонента эндопротеза коленного сустава с применением механических и роботизированных навигационных устройств как основы процессинга принятия интраоперационных решений хирургами. Материалы и методы. Процедуры планирования, выполнения и отчетности настоящего систематического обзора проведены в соответствии с установленными руководящими принципами PRISMA. Изначально выявлено 366 публикаций, соответствовавших основному направлению данного исследования. После исключения дублирующих публикаций для анализа отобрано 158 источников. Критериям отбора соответствовали 11 статей. При оценке учтены выходные данные статей, типы используемых механических или роботизированных навигационных устройств, количество наблюдений, процент осложнений, особенности пред-, интра- и послеоперационного методов определения ротации бедренного компонента эндопротеза коленного сустава в рассмотренных когортах. В общей сложности проанализированы результаты 1198 тотальных артропластик коленного сустава, представленные в анализируемых литературных источниках. Результаты и обсуждение. В большинстве научных работ, посвящённых послеоперационным осложнениям при использовании навигационных устройств, информация о них была неполной, либо данные пациенты были исключены из исследования. Частота возникновения осложнений составила в среднем 2 %. Заключение. При применении навигационных устройств предоперационное планирование ротации бедренного компонента зачастую не осуществляют, а в ходе хирургического вмешательства применяют те же методики и ориентиры, что и при традиционной технике. Послеоперационный мониторинг ротационного позиционирования эндопротеза коленного сустава осуществляют исключительно при выявлении осложнений.
Тотальная артропластика коленного сустава, механические и роботизированные навигационные устройства, мальротация бедренного компонента, пателлофеморальный болевой синдром, ротация эндопротеза коленного сустава, предоперационное планирование, интраоперационные методы, послеоперационная оценка ротации
Короткий адрес: https://sciup.org/142245430
IDR: 142245430 | УДК: 616.728.3-089.843-77-089.168) | DOI: 10.18019/1028-4427-2025-31-4-537-545
Specifics of rotational planning and intraoperative alignment of the femoral component in the knee implant with navigation devices (systematic review)
Introduction The optimal rotational alignment of the femoral component in a knee implant with navigation devices is important for total knee arthroplasty. Measured resection and gap technique are available intraoperative methods to determine the rotation of femur with navigation devices, but each of these methods has its advantages and disadvantages. These aspects have contributed to the development and clinical validation of navigation tools for large joint arthroplasty. The objective of this study was to evaluate the efficacy of determining the rotational alignment of the femoral component in a knee implant with mechanical and robotic navigation devices as a basis for processing intraoperative decision making by surgeons. Material and methods The planning, execution and reporting of this systematic review were conducted in accordance with the established Preferred Reporting Items for Systematic reviews and Meta-Analyses (PRISMA) guidelines. Initially we identified 366 studies that corresponded to the main focus of this research, and 158 studies were selected for analysis after the duplicates had been excluded. Ultimately, only 11 studies fully met the selection criteria. The evaluation included the article data, the type of mechanical or robotic navigation device, the number of cases, the complication rate, and the specifics of the preoperative, intraoperative, and postoperative methods used for determining the rotation of the femoral component in a knee implant in the cohorts reviewed. A total of 1,198 total knee arthroplasties reported in those studies were analyzed. Results and discussion It should be noted that in most of the scientific papers on the postoperative complications of surgeries that involved various navigation devices, the information about them was incomplete or the patients with complications were excluded from the study. In general, the incidence of complications averaged 2 %. Conclusions When the navigation devices are used, the preoperative planning of the femoral component alignment frequently remains unperformed, and techniques and reference points used in surgeries are the same as in the traditional technique. The postoperative monitoring of rotational alignment of the knee implant is performed exclusively when complications are detected.
Текст научной статьи Специфика ротационного планирования и интраоперационного размещения бедренного компонента эндопротеза коленного сустава с применением навигационных устройств
Тотальная артропластика коленного сустава является одним из наиболее эффективных методов лечения прогрессирующего остеоартрита коленных суставов (терминальных стадий) и обеспечивает восстановление опороспособности нижних конечностей. За последние два десятилетия данная методика претерпела значительные улучшения и получила развитие благодаря совершенствованию хирургических тактик, разработке сопровождающего инструментария и материалов, применяемых для изготовления компонентов эндопротезов. Несмотря на это, у 20 % пациентов после операции выявляют неудовлетворительные результаты [1, 2].
Согласно выводам аналитиков, точное ротационное позиционирование компонентов эндопротеза, а также выравнивание оси конечности представляют собой ключевые аспекты, определяющие степень удовлетворённости пациента и достижение необходимых функциональных результатов после проведения тотальной артропластики коленного сустава [3–5]. Вместе с тем, следует отметить, что задача достижения корректного расположения компонентов эндопротеза является достаточно сложной для хирургов, поскольку визуальная и тактильная оценка анатомических структур зачастую затруднена, особенно при наличии тяжёлых деформаций и посттравматических изменений.
Известно, что мальротация бедренного компонента эндопротеза значимо влияет на кинематику сустава, что приводит к нарушению трекинга, возникновению подвывихов и вывихов надколенника, формированию нестабильности при сгибании, развитию артрофиброза и ускоренному износу компонентов эндопротеза коленного сустава [6, 7]. Данные аспекты способствуют активной разработке навигационного инструментария для эндопротезирования крупных суставов и его клинической апробации.
Многие авторы отмечают, что использование механических и роботизированных навигаций при тотальной артропластике коленного сустава позволяет достичь более точной резекции костной ткани и оптимального расположения имплантата, а также обеспечивает сбалансированные зазоры разгибания и сгибания (ротация бедренного компонента), максимально соответствующие анатомии скелета человека и позволяющие сохранить естественный баланс связок [3, 8, 9]. Это снижает вероятность возникновения чрезмерного напряжения и износа компонентов эндопротеза, а также развития болевых ощущений в переднем отделе коленного сустава, что в большей степени связано с неправильной ротацией эндопротеза. При использовании механических и роботизированных навигационных инструментов предоперационное планирование начинается с исследования оперируемого сустава и всей нижней конечности пациента с помощью компьютерной томографии (КТ), которую проводят наряду со стандартной лучевой диагностикой. Применение данной методологии в сочетании с рентгенографией со сшивкой в прямой, боковой и аксиальной проекциях позволяет определить размеры и качество кости, анатомическую и механическую оси нижней конечности, ротацию бедренной кости и выявить любые возможные деформации. Интраоперационно хирурги используют механические устройства (натяжители) для установки бедренного компонента при первичном и ревизионном эндопротезировании коленного сустава, основанные на методе балансировки зазора ( англ .: gap technique). При применении роботизированных компьютерных навигационных систем ротационное позиционирование бедренного компонента эндопротеза основано на методе измеряемой резекции ( англ .: measured resection), в том числе ориентированной по уровню антеторсии проксимального отдела (шейки) бедренной кости [10, 11]. Представленные методологические подходы обладают значительным теоретическим потенциалом для улучшения клинических исходов. Тем не менее, продолжаются активные дебаты относительно эффективности механических и роботизированных навигационных систем по сравнению с визуально-мануальными техниками. Исследователи не сообщают о статистически значимой разнице в послеоперационных результатах, несмотря на благоприятные рентгенологические исследования [7]. Поэтому мы попытались подобрать соответствующие статьи и провести метаанализ возможностей навигационных устройств в контексте корректного ротационного позиционирования эндопротеза при тотальной артропластике коленного сустава.
Цель работы — оценка эффективности определения ротационного позиционирования бедренного компонента эндопротеза коленного сустава с применением механических и роботизированных навигационных устройств как основы процессинга принятия интраоперационных решений хирургами.
Основной гипотезой данного исследования является обоснование доказательной базы анатомически и клинически превосходящих результатов механических и роботизированных навигационных устройств по сравнению с визуально-мануальными техниками, применяемыми в хирургической ортопедии.
МАТЕРИАЛЫ И МЕТОДЫ
Систематический обзор доступной литературы выполнен с использованием в нескольких комбинациях синонимичных или родственных выражений для терминов: ротация бедренного компонента, роботизированные системы эндопротезирования, механические навигационные устройства при то- тальной артропластике, позиционирование компонентов эндопротеза коленного сустава, тотальная артропластика коленного сустава, пателлофеморальная боль после эндопротезирования. Поиск проведен в базах данных PubMed, Google Scholar, Web of Science, CyberLeninka и eLibrary с 10 по 31 марта 2025 г. без ограничений по времени. Рассмотрены рецензируемые журналы, учтены представленные результаты рандомизированных контролируемых испытаний, проспективных испытаний и ретроспективных исследований. Поиск ограничен русскоязычными и англоязычными источниками.
Один из авторов осуществил изучение заголовков и аннотаций информационных источников, представленных в перечисленных реферативных базах с последующей полнотекстовой выборкой материалов по направлениям проводимого поиска. Все ссылки на использованные литературные источники впоследствии были также детально изучены как потенциально информативные по исследуемой отрасли знаний. В случае выявления в доступной литературе признаков противоречивых данных, консенсус достигался с привлечением старших авторов.
Статьи считали соответствующими целям и задачам проводимого исследования при наличии следующих обязательных формальных признаков:
-
— источник включал детальное описание механических и/или роботизированных навигационных устройств, применяемых при первичной или ревизионной тотальной артропластике коленного сустава;
-
— в источнике отражены возможности или пред-, или интра-, или послеоперационной оценки ротации бедренного компонента эндопротеза при использование навигационных устройств;
-
— в источнике проведена оценка осложнений после применения навигационных устройств.
Помимо языковых ограничений из данного аналитического исследования исключены статьи обзорного характера без исследовательской части, технические заметки, не содержащие описания пациентов, результаты экспериментальных работ, выполненных на животных, или испытания in vitro .
Планирование, выполнение и отчетность настоящего систематического обзора выполнено в соответствии с установленными руководящими принципами PRISMA ( англ .: Preferred Reporting Items for Systematic reviews and Meta-Analyses), рекомендованными для корректного проведения систематических обзоров и метаанализов данных.
На рис. 1 представлена блок-схема процесса отбора источников информации. Изначально выявлено 366 публикаций, релевантных основному вектору настоящего исследования. После удаления дублирующих публикаций к рассмотрению приняли 158 источников. Из данной совокупности источников литературы осуществили извлечение 85 полнотекстовых работ в соответствии с названием и резюме. После детального ознакомления с текстами 74 статьи были исключены из аналитического обзора на основе несоответствия заявленным критериям включения и исключения. В систематический обзор включены 11 статей, соответствующие критериям отбора.
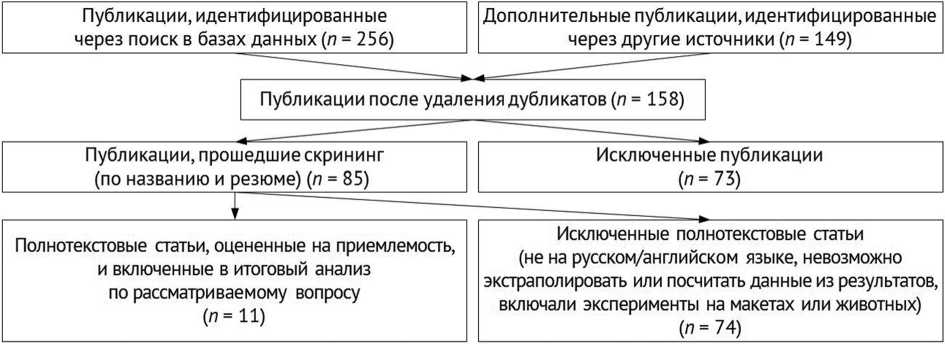
Рис. 1. Методология отбора литературных источников по PRISMA
РЕЗУЛЬТАТЫ И ОБСУЖДЕНИЕ
Суммарно проанализированы результаты 1198 операций тотальной артропластики коленного сустава, представленных в литературных источниках. Необходимо подчеркнуть, что в большинстве научных работ информация о возникших послеоперационных осложнениях оказалась недостаточной, либо пациенты с осложнениями были исключены из исследований. В среднем же частота возникновения осложнений составила 2 %.
Согласно представленным литературным данным, необходимость повторного эндопротезирования коленного сустава зачастую обусловлена болью в переднем отделе. Следует отметить, что именно ротационное выравнивание бедренного компонента эндопротеза оказывает непосредственное воздействие на надколенно-бедренный сустав и, как следствие, на окончательные клинические результаты [12, 13]. Ротация бедренного компонента должна быть тщательно отрегулирована с такой же точностью, как и выравнивание компонента во фронтальной и сагиттальной плоскостях. Естественным также представляется стремление к правильному центрированию надколенника в контексте эндопротезирования. Внедрение новых механических и роботизированных навигационных устройств делает это основополагающим принципом, поскольку процесс центрирования определяет ротацию, придаваемую бедренному компоненту [14, 15].
С целью обеспечения баланса зазоров и определения величины ротации бедренного компонента эндопротеза в роботизированной хирургии применяют два основных метода: measured resection и gap technique. Предоперационного планирования с использованием механических устройств типа FUZION практически не проводят, т.к. оценка ротационного позиционирования бедренного компонента основана на gap technique [16]. A. Bensa et al. провели рандомизированное контрольное исследование, посвященное сравнению методов measured resection и gap technique при тотальной артропластике коленного сустава с применением датчика силы непосредственно перед установкой эндопротеза. Результаты показали, что использование gap technique привело к большей дисперсии ротации бедренного компонента за счет увеличения толщины задней резекции бедренной кости (что расширяет пространство для сгибания) [17].
Как правило, предоперационное планирование при эндопротезировании коленного сустава с применением роботизированных навигационных устройств осуществляют на основе данных компьютерной томографии (КТ), для чего в некоторых случаях требуется использование не всегда доступного специализированного программного обеспечения. В отличие от данных способов при применении механических навигационных устройств и визуально-мануальной техники предоперационная оценка особенностей топографии суставных компонентов ограничивается анализом рентгенограмм в прямой, боковой и иногда аксиальной проекциях, что не всегда является достаточно информативным. Невзирая на то, что традиционная артропластика коленного сустава доказала свою эффективность и доступность, а также на постоянные инновации в области протезирования и хирургических инструментов, значительное число пациентов остаются неудовлетворёнными результатами данного вида оперативного пособия. Причины этого явления могут быть как хорошо известными, так и неопределёнными, и сложно выявляемыми. Стремясь к достижению конечной цели, — созданию надёжного, безболезненного и долговечного сустава, хирург-ортопед все чаще опирается на роботизированные навигационные системы, которые позволяют ему измерить параметры коленного сустава, выбрать эндопротез и реализовать хирургический план путем использования стандартизированных подходов [18–20]. Активное развитие роботизированной артропластики обусловлено хорошими результатами, базирующимися на строгих стандартах позиционирования компонентов эндопротеза, корректного восстановления оси нижней конечности и долгосрочной послеоперационной стабильности сустава [21–24]. Данное направление разработано с целью устранения потенциальных неточностей в позиционировании и выравнивании имплантата, тем самым снижая количество неудовлетворенных пациентов и способствуя повышению качества их жизни.
В ходе многочисленных исследований установлено, что навигационные системы способствуют уменьшению погрешностей в позиционировании компонентов, особенно в сагиттальной плоскости. Однако остаётся открытым вопрос о том, смогут ли новые технологии, о которых говорилось выше, спрогнозировать и воспроизвести интраоперационно ротацию компонентов эндопротеза, улучшить восстановление функций после операции и повысить клиническую эффективность применяемых хирургических подходов [21, 22, 25].
Оценивая суммарные результаты эффективности применения механических и роботизированных навигационных систем при эндопротезировании крупных суставов, можно определить особую значимость выравнивания с их помощью осей нижних конечностей, что обеспечивает точность позиционирования имплантата. На сегодняшний день не вызывает сомнений, что поддержание механической оси в безопасном диапазоне, ограниченном ±3°, может способствовать существенному повышению выживаемости имплантата. Данный параметр является определяющим фактором, влияющим на выживаемость эндопротеза. В случае отклонения механической оси от допустимых значений существенно повышается риск вывиха и нестабильности эндопротеза, что может привести к нарушению функционального восстановления и увеличению частоты ревизий [26].
Внешнее вращение на 3° от задних мыщелков бедренной кости считается приемлемым и общепринятым в методе измеряемой резекции. Однако взаимосвязь между точным позиционированием имплантата и клиническими результатами остаётся предметом дискуссии [26]. Многие систематические обзоры показывают, что визуально-тактильная техника и навигационные системы не демонстрируют значительной разницы при достижении планируемых клинических результатов, что согласуется с нашими собственными результатами [27]. Таким образом, возникает вопрос, является ли механическое выравнивание на 180° и наружная ротация бедренного компонента на 3° универсальными «нормальными» параметрами, и должно ли это быть рутинно целью тотальной артропластики для всех пациентов. На основе исследования 250 здоровых пациентов определили, что угол варусной деформации 1° у женщин и 2° у мужчин является нормой [28]. Кроме того, эти исследования свидетельствуют о значительной вариативности показателей естественной анатомии коленного сустава среди 4 884 пациентов, прошедших КТ, при этом только 5 % общей популяции демонстрируют естественное нейтральное выравнивание [29]. У большинства пациентов, перенесших тотальную артропластику, сустав может быть вынужденно смещён в неестественное положение, что потенциально способно привести к негативным клиническим результатам, несмотря на достигнутое нейтральное выравнивание. Учитывая изменчивость коронарного выравнивания коленного сустава у пациентов без остеоартрита и широкую вариативность всех параметров позиционирования, становится очевидной необходимость более точного и индивидуального подхода при эндопротезировании коленного сустава [30].
Как следует из представленных литературных данных, настройка и регистрация роботизированных или механических навигационных систем при тотальной артропластике уникальны, требуют детальной проработки и приводят к увеличению общего времени операции [31]. Данное исследование показало, что при использовании механической или роботизированной навигации на завершение интеграции эндопротеза затрачивается больший временной промежуток, чем в группе визуально-тактильной техники, что может быть обусловлено сложностью выполнения отдельных этапов, неопытностью оператора и более длительным обучением данной методологии. Значительная доля времени в ходе операции отводится на выполнение таких задач, как настройка, фиксация бедренной и большеберцовой костей, а также их выравнивание [32].
Следует отметить, что увеличение продолжительности хирургического вмешательства может привести к повышению вероятности возникновения инфекционных осложнений, что, в свою очередь, способно вызвать необратимые изменения, как в мягких тканях, так и в костных структурах сустава [33].
Выходные данные статей, виды используемых механических или роботизированных навигационных устройств, количество наблюдений, число осложнений (в %), особенности пред-, интра- и послеоперационного способов определения ротации бедренного компонента эндопротеза коленного сустава рассмотренных когорт отражены в табл. 1.
Таблица 1
Количество пациентов, навигационное устройство, способы пред-, интра- и послеоперационного определения ротационного положения бедренного компонента эндопротеза коленного сустава
|
Автор(-ы), номер ссылки |
Используемое механическое или роботизированное навигационное устройство |
Общее количество наблюдений, n |
Количество осложнений, % |
Предоперационное планирование ротации эндопротеза |
Интраоперационный способ определения ротации эндопротеза |
Послеоперационный контроль ротации эндопротеза |
|
Петухов А.И. и др. [34] |
Medtronic, Stryker и Brain LAB |
120 |
2,5 % |
Не проводили |
Measured resection |
Не проводили |
|
Blyth M.J. et al. [35] |
Electromagnetic navigation systems |
101 |
Не определено |
КТ |
Measured resection |
КТ |
|
Matassi F. et al. [36] |
i-ASSIST accelerometer-based navigation system |
18 |
Не определено |
КТ или МРТ |
Сombined technique |
КТ |
|
Nam C.H. et al. [37] |
MAKO (Stryker, Mahwah, NJ) |
154 |
Не определено |
КТ |
Measured resection |
Не проводили |
|
Лычагин А.В. и др. [38] |
T-Solution One® (THINK Surgical Inc.) |
29 |
Не определено |
КТ |
Measured resection |
Не проводили |
|
Айрапетов Г.А. и др. [39] |
Робот ассистент |
20 |
Не определено |
КТ |
Measured resection |
Не проводили |
|
Лычагин А.В. и др. [40] |
T-Solution One® (THINK Surgical, Inc.) |
47 |
Не определено |
КТ |
Measured resection |
Не проводили |
|
Chandrashekar P. et al. [41] |
CUVIS Joint™ |
500 |
Не определено |
КТ, предоперационный планировщик J planner™ |
Measured resection |
КТ |
|
Blum C.L. et al. [42] |
OMNIBotics и ультраконгруэнтная система OMNI Apex (Corin USA, Raynham, MA) |
32 |
1,9 % |
КТ |
Measured resection |
КТ |
|
Vanlommel L. et al. [43] |
ROSA Total Knee System |
90 |
Не определено |
КТ |
Measured resection |
КТ |
|
Maciąg B.M. et al [44] |
Динамический натяжитель FUZION |
87 |
Не определено |
Не проводили |
Gap technique |
КТ |
Принимая во внимание ключевые аспекты, результаты следует трактовать с осторожностью и нельзя их экстраполировать на все системы. В условиях прогресса в области механических и роботизированных навигационных систем возникает необходимость в проведении новых исследований, направленных на оценку последних достижений в этой сфере, предполагающих долгосрочное наблюдение, которые позволят сделать более точные выводы относительно результатов и преимуществ.
Таким образом, тотальная артропластика коленного сустава, выполненная с применением механических и роботизированных навигационных устройств, продемонстрировала более эффективное восстановление механической оси нижней конечности по сравнению с группой пациентов, прооперированных с использованием визуально-тактильной техники. Однако ротационное положение компонентов эндопротеза в пред- и послеоперационном периодах очень часто не было оценено, а время операции при использовании стандартной техники было короче на 30–40 минут.
ЗАКЛЮЧЕНИЕ
При использовании механических и роботизированных навигационных устройств зачастую не осуществляют предоперационное планирование ротации бедренного компонента, а в ходе хирургического вмешательства применяют те же методики, что и при традиционной технике тотальной артропластики коленного сустава.
Послеоперационный мониторинг ротационного позиционирования эндопротеза коленного сустава осуществляют исключительно при обнаружении осложнений. В основном в представленных публикациях внимание уделяют оценке механического выравнивания и клиническим результатам, выраженным в шкале WOMAC.
Тотальное эндопротезирование, выполняемое в соответствии с традиционной методикой, предполагает более длительный период наблюдения и демонстрирует сопоставимые результаты в отношении объёма движений. Для полноценного анализа долгосрочных преимуществ и экономической целесообразности применения механических и роботизированных навигационных систем необходимы дополнительные исследования.
