Способ расширения автономности пилотирования дрона, осуществляющего мониторинг технического состояния воздушной линии электропередачи напряжением 6-10 кВ

Автор: Чернышов В.А., Семенов А.Е., Печагин Е.А.
Журнал: Вестник аграрной науки @vestnikogau
Рубрика: Сельскохозяйственное оборудование и техника
Статья в выпуске: 2 (65), 2017 года.
Бесплатный доступ
Отмечена активизация интереса военных и гражданских структур к использованию беспилотных летательных аппаратов - дронов. Освящены основные направления и достижения в работе кафедры «Электроснабжение» ФГБОУ ВО Орловский ГАУ по адаптации дрона для нужд электроэнергетики, в частности для проведения мониторинга технического состояния воздушной линии электропередачи напряжением 6-10 кВ. Отмечено, что сконструированный опытный образец дрона успешно прошел испытания в производственных условиях, подтвердив ожидаемый технико-экономический эффект, достигаемый существенным сокращением времени прохождения информации о повреждениях на линии электропередачи и более оперативным устранением аварийных ситуаций. По итогам испытаний обоснована одна из главных задач по дальнейшему продолжению работы, заключающаяся в усовершенствовании способов автопилотирования дрона в сложных метеорологических условиях. Рассмотрена специфика работы и представлен критический анализ сложных автоматизированных системам управления беспилотными летательными аппаратами. Сформулированы требования, предъявляемые к вновь разрабатываемой аппаратной части дрона, основными из которых являются обеспечение надежности и безопасности дистанционного пилотирования, а также обеспечение электромагнитной совместимости с воздушной линией (ВЛ) напряжением 6-10 кВ. Предложен способ аварийного пилотирования дрона, выполняющего мониторинг технического состояния воздушной линий электропередачи напряжением 6-10 кВ. Предлагаемый способ управления предполагает продолжение полета дрона, потерявшего радиосвязь с наземным пунктом управления, вдоль трассы воздушной линии электропередачи в заранее установленный район аварийной посадки, причем управление дроном осуществляется посредством аварийного автопилота со следящим электроприводом, использующим в качестве источника управляющих сигналов чувствительные элементы - емкостной антенный датчик и катушку индуктивности, реагирующие на электромагнитное поле ВЛ напряжением 6-10 кВ. Данный способ весьма актуален при мониторинге технического состояния воздушной линии электропередачи, т.к. позволяет повысить безопасность полета и предотвратить материальный ущерб, связанный падением и потерей дрона.
Дрон, воздушная линия электропередачи, следящий электропривод, электромагнитное поле, автопилот
Короткий адрес: https://sciup.org/147124384
IDR: 147124384 | УДК: 629.7.014:623.746.4-519:629.7.017.1:621.315-047.36
Тhе method of expanding the autonomy of the unmanned aircraft’s (drone’s) piloting for monitoring the technical condition of power transmission lines with voltage of 6-10 kV
It is remarked that the interest of civil and military organizations to the usage of unmanned aircrafts - drones has increased. The main directions and achievements in the activity of the Department "Electric power supply" of Oryol State Agrarian University devoted to the drone’s adaptation for the needs of the electric power industry in particular for monitoring the technical condition of power transmission lines with the voltage 6-10 kV are consecrated. It is noted that designed experimental model of drone has been successfully tested in production environment, confirming the expected technical and economic effect which is achieved with a significant reduction of the transit time information about damage to power transmission lines and more rapid elimination of emergency situations. By the results of the tests one of the main tasks for the further continuation of the work consists in improving the methods of auto-pilot drone in adverse weather conditions. The specific of operation is studied and the critical review of the complex automated control system of the unmanned aircrafts is presented. The requirements to the newly developed the drone’s hardware part are formulated. The reliability, safety of the remote flying and the providing of the electromagnetic compatibility with power transmission lines with the voltage 6-10 kV are the main of the requirements. The method of the emergency piloting of the drone executing the monitoring the technical condition of power transmission lines with the voltage 6-10 kV is presented. The proposed control method allows to the drone, which lost the radio connection with ground control post, to continue the flying along power transmission line to the predetermined area of the emergency landing. The drone’s control is realized by the emergency automatic pilot with servo drive using the sensitive elements such as capacitive aerial sensor and the inductor reacting to the electromagnetic field with the voltage 6-10 kV as the source of control signals. The presented method is very relevant when the monitoring the technical condition of power transmission lines because allows to promote the flight safety and to prevent the material damage caused by the fall and the loss of the drone.
Текст научной статьи Способ расширения автономности пилотирования дрона, осуществляющего мониторинг технического состояния воздушной линии электропередачи напряжением 6-10 кВ
B настоящее время во всем мире активно развиваются технологии всестороннего использования беспилотных летательных аппаратов – дронов как для военных, так и для гра^данских целей. He oтcтaeт ʙ этой области и ФГБОУ BO Орловский Г^У. Так, сотрудниками кафедры «Электроснаб^ение» активно проводится работа по адаптации гра^данского дрона под ну^ды электроэнергетики, а именно для мониторинга технического состояния линий электропередачи напря^ением 6-10 кВ [1, 2]. Эта работа включает в себя исследование целого ряда вопросов, связанных: с совершенствованием конструкции дрона, с управлением полетом в автономном ре^име с использованием данных спутниковых систем навигации, а так^е с автоматизированным сбором и обработкой аппаратной и визуальной информации о состоянии воздушной линии электропередачи 6-10 кВ [8].
Ha сегодняшний день опытный образец дрона успешно прошел испытания в производственных условиях, подтвердив о^идаемый технико-экономический эффект, достигаемый существенным сокращением времени прохо^дения информации о повре^дениях на линии электропередачи и более оперативным устранением аварийных ситуаций [3]. По итогам испытаний следует, что одной из главных задач по дальнейшему продол^ению работы, является усовершенствование способов автопилотирования дрона в сло^ных метеорологических условиях, направленное на повышение наде^ности и безопасности пилотирования, а так^е на сни^ение материального ущерба, связанного с падением и утерей дрона.
Благодаря упорству, целеустремленности и профессионализму коллектива единомышленников, проект «Беспилотный летательный аппарат для мониторинга состояния ЛЭП «БПЛА-ОСЛЭП» был удостоен золотой медали на е^егодной Российской агропромышленной выставке «ЗОЛОТ^Я ОСЕНЬ-2016».
Наиболее распространенными способами управления дронами являются дистанционно-пилотируемый и автоматический способы. Дистанционнопилотируемый способ, включающий: ручное управление, осуществляющееся за счет управления дроном оператором в ре^име реального времени, а так^е автоматизированное управление, осуществляющееся автономно, но с возмо^ностью внесения оператором изменений полетного задания или его корректировки. Автоматический способ - управление, совершающееся автопилотом по заранее заданной траектории на заданной высоте с заданной скоростью и со стабилизацией углов ориентации.
Наиболее перспективным является дистанционно-пилотируемый способ, позволяющий в ре^име реального времени проводить мониторинг местности и объектов, а так^е участвовать в спасательных операциях. Оператор с наземного пункта управления полетами, визуально, с помощью видеокамер, находящихся на дроне, в зоне прямой видимости, управляет летательным аппаратом или вносит корректировки в полетное задание [4].
Несмотря на то, что современные системы автоматического управления, разработанные для дронов на первый взгляд кажутся весьма совершенными, научно-технический прогресс открывает изобретателям все новые и новые возможности по их модернизации и винтокрылым прототипам предстоит пройти еще долгий путь технологической эволюции.
При разработке системы управления дроном не стоит забывать, что необоснованное насыщение дрона сложными автоматизированными системами управления, не только повышает его стоимость, но и увеличивает вероятность возникновения сбоев, приводящих в итоге к утрате самого дрона.
В этой связи к аппаратной части дрона предъявляются весьма высокие требования по обеспечению необходимых технических параметров и характеристик, в числе которых особое внимание уделяется обеспечению наде^ности и безопасности дистанционного пилотирования, обеспечению противоударности, пылевлагозащищенности, радиозащищенности, а также обеспечению электромагнитной совместимости с воздушной линией (ВЛ) напряжением 6-10 кВ [4].
Таким образом, непрерывный поиск принципиально новых и более совершенных инженерно-технических решений в области беспилотного воздухоплавания, является одной из актуальных задач, решение которой, требует разработки альтернативных, более эффективных методов дистанционного пилотирования дронов с учетом появляющихся открытий и достижений в науке и технике.
^вторами данной публикации предлагается принципиально новый способ аварийного пилотирования дрона, осуществляющего мониторинг технического состояния ВЛ 6-10 кВ, который мо^ет быть весьма актуален в случае потери радиосвязи ме^ду дроном и наземным пунктом управления, т.к. предполагает продол^ение полета дрона вдоль трассы ВЛ 6-10 кВ в заранее установленный район аварийного приземления, причем управление дроном осуществляется посредством аварийного автопилота со следящим электроприводом, использующим в качестве источника управляющих сигналов чувствительные элементы – емкостной антенный датчик и катушку индуктивности, реагирующие на электромагнитное поле ВЛ 6-10 кВ [5].
Следящие приводы (СП) являются одним из ва^нейших элементов современных автоматизированных систем управления различными объектами, в том числе беспилотными летательными аппаратами. Hаибольшее применение СП получил в промышленности и военной технике для управления поло^ением объектов с высокой степенью точности. СП является замкнутой динамической системой, точно воспроизводящей на выходе входной сигнал, произвольно меняющийся во времени, например, обеспечивающей точное повторение дви^ений, преодолевающих какие-либо усилия [6], или проще говоря, оператору посредством следящего привода доступно дистанционное управление пилотируемым объектом, посредствам легкого изменения поло^ения рычага-манипулятора на пульте управления.
^нтенный датчик состоит из нескольких последовательно соединенных элементов, выполненных в виде петель из изолированного провода, на этих петлях, имеющих емкость относительно проводов ВЛ 6-10 кВ, создается напря^ение, пропорциональное рабочему напря^ению воздушной линии, которое затем усиливается и в виде задающего сигнала поступает в блок автоматического аварийного пилотирования.
Катушка индуктивности воспринимает индуктивную реакцию на ток в проводах ВЛ 6-10 кВ и слу^ит для автоматической калибровки расстояния от БЛ^ до заданной ВЛ 6-10 кВ, так как ток нагрузки линии влияет на полное напря^ение, наводимое в емкостном антенном датчике.
Установленные в носовой части дрона, емкостной антенный датчик и катушка индуктивности позволяет аварийному автопилоту посредством СП позиционировать дрон и обеспечивать стабилизацию ре^има его полета при неизменном курсе относительно ВЛ 6-10 кВ.
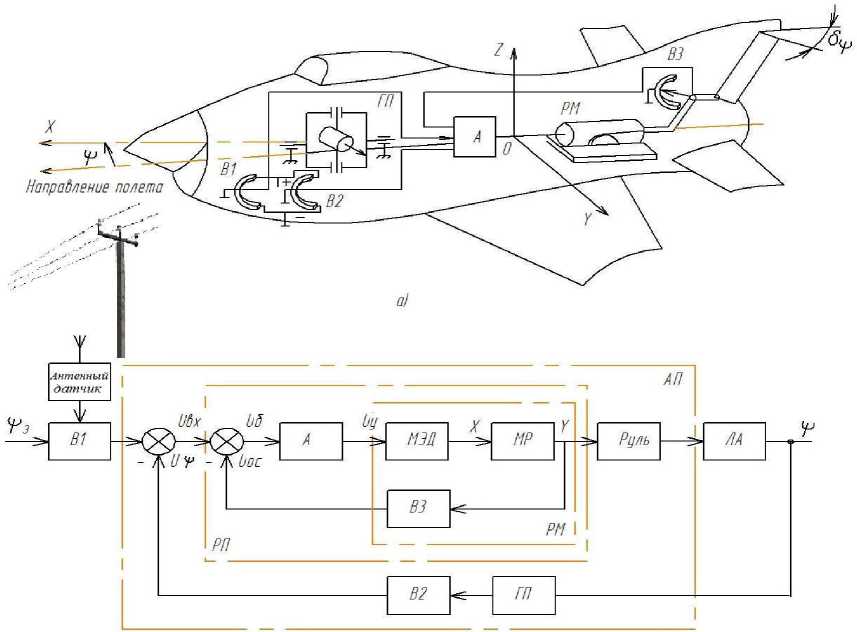
Рассмотрим функциональную и структурную схемы управления полетом дрона по курсу вдоль ВЛ напря^ением 6-10 кВ (рис. 1) [7].
Структурная схема (рис. 1 б)) включает в себя два контура: внутренний – рулевого электропривода (РЭП), обеспечивающего стабилизацию ре^има полета при неизменном курсе (ψз=const), и внешний – аварийного автопилота ^П, предназначенного для автоматического аварийного управления полетом (изменения курса).
Управляемым объектом следящего внешнего контура (рис. 1 а)) является дрон, выходной координатой – угол рыскания ψ (угол ме^ду условной линией магнитного поля ВЛ 6-10 кВ и траекторией полета дрона). Для измерения углового поло^ения дрона применяется гироприбор (ГП), ось которого заранее выставлена вдоль продольной оси дрона. Сохраняя неизменными свое поло^ение в течение своего полета, ось ГП слу^ит указателем курса. В ре^име стабилизации при отклонении дрона от заданного курса с потенциометра В2, закреплённого в корпусе дрона и перемещающегося с ним относительно дви^ка, связанного с осью ГП, снимается сигнал Uψ. Этот сигнал поступает на рулевой электропривод РП, отклоняющий руль направления дрона. При отклонении руля возникает аэродинамический момент относительно оси OZ, разворачивающий самолет по курсу вдоль ВЛ 6-10 кВ до тех пор, пока сигнал с В2 не станет равным нулю.
Разворот дрона по курсу осуществляется путем формирования блоком автоматического аварийного пилотирования (в данном случае выступающего в роли оператора СП) соответствующей установки задающему потенциометру В1, электрически связанному с потенциометром B2 ГП. Стоит отметить, что аналогичным способом функционирует и подсистема стабилизации дрона по высоте относительно ВЛ 6-10 кВ, функционирующая в функции усиления (ослабления) напря^енности электромагнитного поля ВЛ 6-10 кВ, непрерывно фиксируемое емкостным антенным датчиком.
В)
Рисунок 1 – Функциональная и структурная схемы управления полетом дрона по курсу вдоль ВЛ 6-10 кВ
В ре^име управления и при наличии ошибки рассогласования Uвх обеспечивается включение РЭП, отклонение руля и разворот дрона на заданный угол.
Внутренний контур является исполнительным устройством системы управления (внешнего контура) и одновременно самостоятельным СП. Управляемым объектом этого СП является руль направления, выходной координатой – поло^ение руля δψ. Для определения поло^ения руля в обратной связи ОС слу^ит потенциометр B3, сигнал Uос с которого сравнивается с управляющим сигналом Uвх. Разностный сигнал Uδ усиливается в усилителе ^ и подается на рулевую машину РМ, отклоняющую руль дрона до исчезновения ошибки рассогласования.
В качестве РМ используется электрическая рулевая машина, включающая механический редуктор, микроэлектродвигатель и потенциометр обратной связи В3 [7].
Таким образом, при проведении мониторинга технического состояния ВЛ 6-10 кВ, в случае потери радиосвязи с наземным пунктом управления, предлагаемый способ построения системы аварийного управления дрона, в значительной степени повышает наде^ность его дистанционного пилотирования и как следствие безопасность проведения его полета, что позволяет предотвратить материальный ущерб, связанный с его падением и потерей.
Список литературы Способ расширения автономности пилотирования дрона, осуществляющего мониторинг технического состояния воздушной линии электропередачи напряжением 6-10 кВ
- Чернышов В.А., Семенов А.Е., Печагин Е.А. Способ управления беспилотным летательным аппаратом, осуществляющим мониторинг технического состояния ВЛ 6-10 кВ при потере радиосвязи с наземным пунктом управления/В.И. Вернадский: Устойчивое развитие регионов: материалы Международной научно-практической конференции. В 5 Т. Т. 4. (Тамбов, 7-9 июня 2016 г.). Изд-во ФГБОУ ВО ТГТУ. 2016. С. 247-251.
- Виноградов А.В., Семенов А.Е., Мороз А.О. Способ мониторинга технического состояния элементов воздушной линии электропередачи//Агротехника и энергообеспечение. 2014. № 3(3). С. 64.
- Протокол №1 испытания беспилотного летательного аппарата (БПЛА ОСЛЭП Орел ГАУ) для осмотра ВЛ на базе Мценского РЭС ОАО «МРСК Центра» -«Орелэнерго» от 26.11.2014 г.
- Фомина И.А. Метод тестирования устойчивости телекоммутационной системы управления беспилотных летательных аппаратов к воздействию сверхкоротких электромагнитных импульсов: дис.. канд. экон. наук. Москва, 2015. 139 с.
- Пенович Е.И. Отыскание замыканий на землю в распределительных сетях 6-10 кВ: Б-ка электромонтера, вып. 412. М.: «Энергия», 1975. 120 с.
- ГОСТ Р 50369-92. Электроприводы. Термины и определения. М.: Изд-во стандартов, 1993. 16 с.
- Смирнова В.И., Разинцев В.И. Проектирование и расчет автоматизированных приводов: учебник для сред. спец. учеб. заведений. М.: Машиностроение, 1990. 368 с.
- Основы научных исследований: учебное пособие/И.Н. Кравченко, А.В. Коломейченко, В.Н. Логачев . СПб.: Изд-во Лань, 2015. 304 с.
