Сравнение алгоритмов распознавания объектов

Автор: Попов Глеб Александрович, Попова Татьяна Александровна
Журнал: НБИ технологии @nbi-technologies
Рубрика: Инновации в информатике, вычислительной технике и управлении
Статья в выпуске: 2 т.14, 2020 года.
Бесплатный доступ
В статье рассматриваются алгоритмы обнаружения объектов на изображении, основанные на описании изображения по особым точкам. Проводится сравнение алгоритмов SURFи SIFT, анализ выделенных особых точек при распознании каждого объекта, анализ ошибок I и II рода при выявлении объектов в видеопотоке.
Видеонаблюдение, алгоритмы распознавания объектов
Короткий адрес: https://sciup.org/149129804
IDR: 149129804 | УДК: 004.93 | DOI: 10.15688/NBIT.jvolsu.2020.2.4
Comparison of object recognition algorithms
Despite the increasing popularity of process automation, modern video surveillance systems still require constant human involvement to establish the fact of dangerous situations. But at present, systems are becoming more complex, this leads to an increase in threats and it is no longer possible for the operator to keep track of all emerging threats. In addition, in the field of video surveillance, tasks have been added that a person can no longer control just by watching video cameras [1; 2]. In this connection, you need to automate the process. Methods that provide maximum detection stability for small object movements, zoom changes, turning the object at a small angle, and changing lighting are based on describing the image at specific points. A special point is a point that has a number of key features that distinguish it from many other points in the image. Special points are the main characteristics of the object in the video surveillance system. The best object recognition algorithms based on this principle are the SURF and SIFT algorithms. These algorithms search for the direct occurrence of the reference image in relation to the observed one. The article discusses algorithms for detecting objects in an image based on the description of the image by special points. Acomparison of SIFT and SURF algorithms, the analysis highlighted particular points in the recognition of each object, error analysis AI Node in identifying objects in the video stream.
Текст научной статьи Сравнение алгоритмов распознавания объектов
DOI:
Не смотря на все возрастающую популярность автоматизации процессов, современные системы видеонаблюдения все еще требуют постоянного участия человека для установления факта опасных ситуаций. Но в настоящее время системы становятся все сложнее, это приводит к возрастанию угроз и оператору уже не представляется возможным уследить за всеми возникающими угрозами. К тому в сфере видеонаблюдения добавились задачи, которые уже не сможет проконтролировать человек, просто наблюдая за видеокамерами [1; 2]. В связи с этим требуется автоматизация этого процесса.
Методы, которые дают максимальную стабильность обнаружения при небольших движениях объекта, изменениях масштаба, повороте объекта на небольшой угол, смене освещения основываются на описании изображения по особым точкам. Особая точка – это точка, которая имеет ряд ключевых признаков,
которые выделяют ее из множества других точек изображения. Особые точки являются главными характеристиками объекта в системе видеонаблюдения. Лучшими алгоритмами распознавания объектов, которые основываются на данном принципе, являются алгоритмы SURF и SIFT. Эти алгоритмы осуществляют поиск непосредственного вхождения эталонного изображения по отношению к наблюдаемому.
В представленной таблице (см. таблицу) приведены результаты исследования автора, который в своей работе [3] провел сравнительный анализ современных алгоритмов распознавания объектов.
По результатам анализа невозможно определить лучший алгоритм. Отсюда можно заключить, что следует добавить другие критерии оценки сравнения, такие как поворот объекта, изменение его положения и размера на изображении.
Для определения наиболее эффективного алгоритма распознаваниябыл проведен ряд экспериментальных исследований.
Для проведения экспериментов были взяты 2 эталонных изображения охраняемых объектов – жесткие диски (рис. 1), с разным количеством особых точек.
Объекты на видеозаписях изменяли свое положение, угол поворота и отдаленность от камеры. Раскадровка одной из видеозаписей представлена на рисунке 2.
По результатам проведения первого эксперимента по распознаванию объекта с большим количеством ключевых точек (369 для алгоритма SURF и 626 для алгоритма SIFT) были получены следующие результаты:
График сравнения алгоритмов распознавания в отношении ложные срабатывания/ус-пешное обнаружение для объекта с большим
количеством особых точек представлен на рисунке 3. Значение 1 – объект найден в кадре, значение 0 – не найден.
Время распознавания для двух алгоритмов (в мс) представлено на рисунке 4, для алгоритма SURF среднее время распознавания составило 180.14 мс, для алгоритма SIFT 287.39 мс.
По результатам проведения второго эксперимента по распознаванию объекта с малым количеством ключевых точек (115 для алгоритма SURF и 214 для алгоритма SIFT) были получены следующие результаты:
График сравнения алгоритмов распознавания в отношении ложные срабатывания/ус-пешное обнаружение для объекта с малым количеством особых точек представлен на рисунке 5. Значение 1 – объект найден в кадре, значение 0 – не найден.
Таблица 1
Сравнительный анализ алгоритмов распознавания объектов
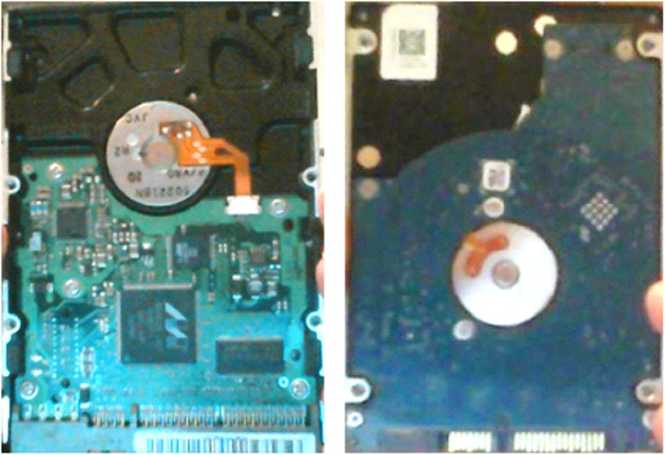
Рис. 1. Жесткие диски с разным количеством ключевых точек
|
Метод SURF SIFT |
Кол-во точек 200 |
Качество распознавания, % 74 63 |
Объем требуемой памяти, Мб 0,05 0,98 |
Время сопоставления, сек ~ 0,5-1 ~ 0,5-1 |
|
SURF SIFT |
500 |
76 78 |
0,86 0,93 |
~0,8-1,3 ~0,8-1,3 |
|
SURF |
1000 |
75 |
1,2 |
~1-1,2 |
|
SIFT |
78 |
1,2 |
~1-1,3 |
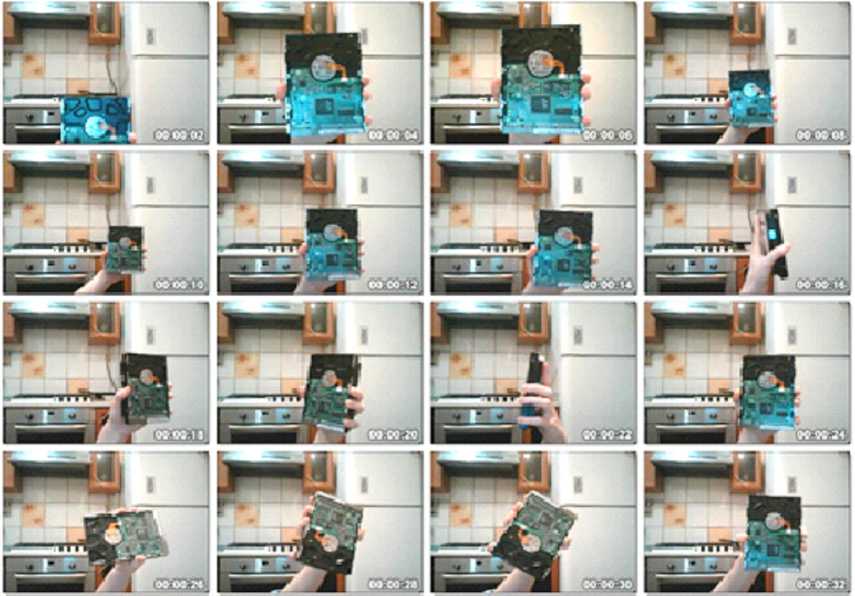
Рис. 2. Раскадровка первой видеозаписи
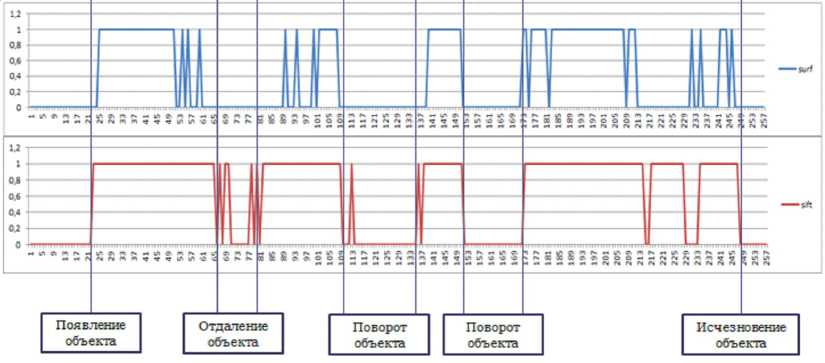
Рис. 3. График срабатываний для объекта 1
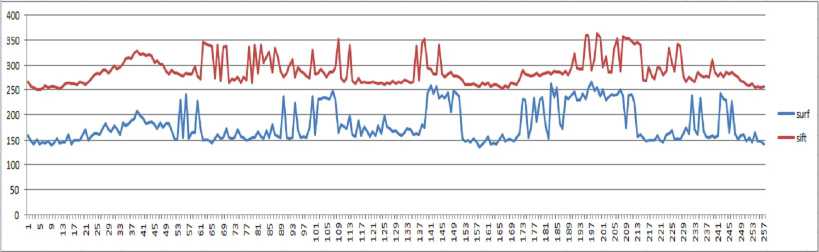
Рис. 4. График времени распознавания для объекта 1
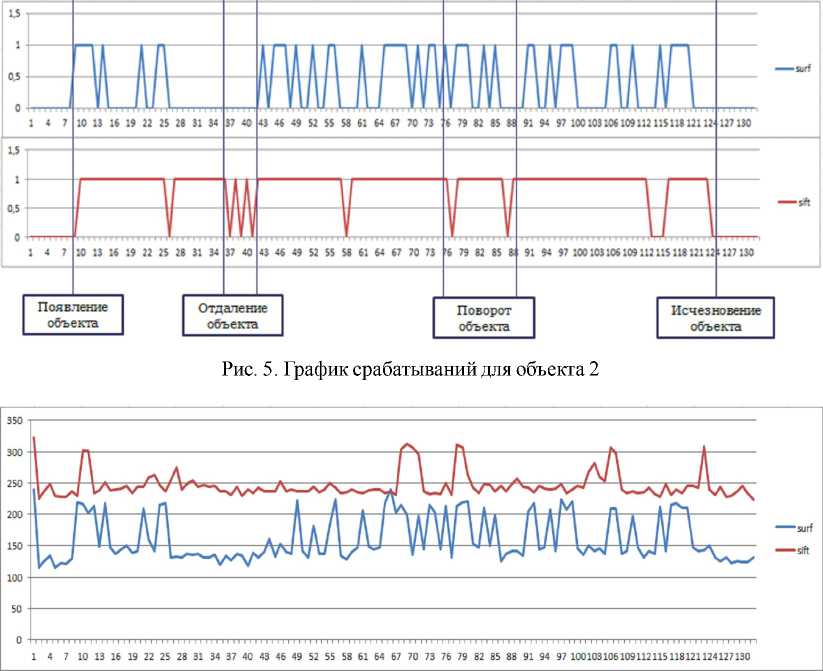
Рис. 6. График времени распознавания для объекта 2
Время распознавания для двух алгоритмов (в мс) представлено на рисунке 6, для алгоритма SURF среднее время распознавания составило 161,14 мс, для алгоритмаSIFT 246,57 мс.
Экспериментальные исследования показали, что алгоритм SIFT в условиях поворота, изменения положения и размера объекта на изображении значительно превосходит по результатам алгоритм SURF, независимо от количества особых точек. Алгоритм SIFT уступает алгоритму SURF только во времени распознавания. Таким образом, можно сделать вывод, что алгоритм SIFT лучший алгоритм распознавания объектов.
Список литературы Сравнение алгоритмов распознавания объектов
- ГОСТ Р 51558-2000. Системы охранные телевизионные. Общие технические требования и методы испытаний. - М.: Госстандарт России, 2000. - 14 с.
- Р 78.36.002-99. Выбор и применение телевизионных систем видеоконтроля. -Электрон. дан. - М., 1999. - Режим доступа: https://docplan.ru/Data2/1/4294849/4294849908.htm. - Загл. с экрана.
- Финогеев, А. Г. Методика распознавания изображений на основе рандомных деревьев в системах автоматизированного проектирования расширенной реальности / А. Г. Финогеев, М. В. Четвергова //Современные проблемы науки и образования. - 2012. - № 5.
