Сравнение колеса Мекана с обычным колесом

Автор: Аманжол М.К., Атанов С.К., Жарлыкасов Б.Ж.
Журнал: Мировая наука @science-j
Рубрика: Естественные и технические науки
Статья в выпуске: 5 (38), 2020 года.
Бесплатный доступ
В данной статье рассмотрено колесо Мекана, принцип их действия, а также преимущества и недостатки перед обычным колесом.
Колесо Мекана, Mecanum, MQTT, API
Короткий адрес: https://sciup.org/140294023
IDR: 140294023 | УДК: 681.5
Comparison of a Mekan wheel with a normal wheel
This article discusses the Mekan wheel, the principle of their operation, as well as advantages and disadvantages over a conventional wheel.
Текст научной статьи Сравнение колеса Мекана с обычным колесом
Преимущества транспортного средства с колесами Мекана по сравнению с автомобилем с обычными колесами были представлены в [1]. Обычно роботизированные транспортные средства предназначены для выполнения плоских движений. В двумерном пространстве тело имеет три степени свободы, способное перемещаться в обоих направлениях и вращаться вокруг своего центра тяжести. Однако большинство обычных транспортных средств не способны независимо контролировать каждую степень свободы, поскольку обычные колеса не могут двигаться в направлении, параллельном их оси.
Эти так называемые неголономные ограничения колеса не позволяют транспортным средствам, использующим систему скольжения, двигаться перпендикулярно его направлению движения. Чтобы достичь любого местоположения и ориентации в двухмерном пространстве, это может потребовать сложных маневров и сложного планирования пути. Неголономные транспортные средства могут двигаться в некоторых направлениях (вперед и назад) и могут описывать некоторые изогнутые траектории, но не могут двигаться вбок. Например, чтобы реализовать параллельную парковку, автомобиль с дифференциальным приводом должен совершить ряд маневров (рисунок 3) .
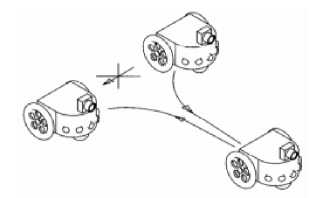
Рисунок 3: Боковая парковка дифференциального привода мобильных роботов [3]
Транспортное средство без неголономных ограничений может двигаться в любом направлении и в любой ориентации. Эта возможность широко известна как всенаправленная мобильность. Всенаправленные транспортные средства имеют большие преимущества по сравнению с обычными платформами, с автомобильным рулевым управлением Аккермана или системой дифференциального привода с точки зрения движения в труднодоступных местах [2]. Они могут двигаться в стороны, поворачиваться на месте и следовать сложным траекториям. Эти транспортные средства способны легко выполнять задачи в условиях со статическими и динамическими препятствиями и в узких пространствах. Как правило, автомобили на основе колеса Мекана имеют квадратную или прямоугольную конфигурацию с двумя колесами на каждой стороне шасси. Использование четырех колес обеспечивает всенаправленное движение для транспортного средства без необходимости использования обычной системы рулевого управления. Когда приводятся в движение колеса Мекана, наклонные периферийные ролики преобразуют часть силы в направлении вращения колеса в силу, перпендикулярную к направлению колеса.
В зависимости от направления и скорости каждого отдельного колеса результирующая комбинация всех этих сил создает вектор полной силы в любом желаемом направлении, что позволяет платформе свободно перемещаться в направлении вектора результирующей силы без изменения направления самих колес. Робот может двигаться в любом направлении, вперед / назад, а также влево / вправо и поворачиваться на месте благодаря специальным колесам (Рисунок 4). Это особенно полезно при маневрировании в стесненных условиях [3].
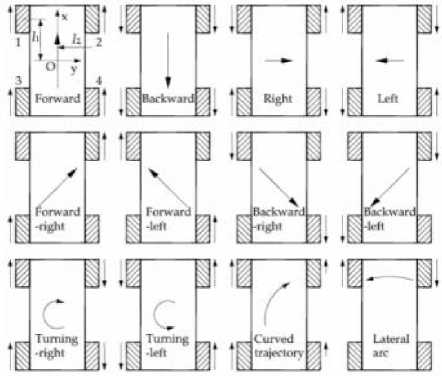
Рисунок 4: Движение транспортного средства с колесами Мекана [3]
Есть вариант сделать платформу на основе колеса Мекана для удаленного управления. Пользовательский интерфейс может быть разработан как мобильное приложение, использующее протокол MQTT [5, 7], или как сайт, использующий API сайта для получения данных [6].
Эта технология также может быть использована для организации сложных систем безопасности [4], что позволит осуществлять мониторинг объекта при его перемещении. Так же можно установить систему видео наблюдения с системой распознавания и идентификацией объектов [8, 9, 10, 11]. Можно использовать для таких целей разреженное представление изображений в задачах распознавания с использованием идеи метода Монте-Карло [12, 13, 14].
Роботы с данными колесами могут быть использованы для достижения различных целей, таких как: поиск и спасательные миссии, военные действия, разведка и добыча полезных ископаемых, транспортировка больших грузов. А также могут быть применены и внутри помещений, например, перевозка грузов, роботизированные инвалидные коляски с электроприводом или тележки.
Список литературы Сравнение колеса Мекана с обычным колесом
- Dickerson, S.L., Lapin, B.D., „Control of an omni-directional robotic vehicle with Mecanum wheels”, in National Teleystems Conference Proceedings, p. 323-328, March 26-27, Atlanta, USA, 1991.
- Borenstein, J., Everett, H.R., Feng, L., „Navigating Mobile Robots: Sensors and Techniques”, A K Peters, Ltd, MA, USA, 1996.
- Doroftei, I., Grosu, V., Spinu, V., „Omnidirectional Mobile Robot – Design and Implementation”, Bioinspiration and Robotics: Walking and climbing Robots, Book edited by: Maki K. Habib, ISBN 978-3-902613-15-8, pp. 544, I-Tech, Vienna, Austria, EU, September 2007.
- Umarova T., Zharlykasov B. Z., Abatov N. T. THE MODEL OF ACCESS CONTROL SYSTEM IN THE ENTERPRISE BASED ON ARDUINO //Экономика и социум. – 2017. – №. 12. – С. 1925-1928.
- Жарлыкасова А. Н., Жарлыкасов Б. Ж., Муслимова А. З. Модель удаленного управления с использованием протокола MQTT //Наука. Информатизация. Технологии. Образование. – 2018. – С. 485-491.
- Кошевой С. Р., Жарлыкасов Б. Ж., Абатов Н. Т. API КАК СПОСОБ ОБСЛУЖИВАНИЯ КЛИЕНТОВ //Главные характеристики современного этапа развития мировой науки. – 2018. – С. 76-80.
- Жарлыкасова А. Н., Муслимова А. З. СРАВНИТЕЛЬНЫЙ АНАЛИЗ ПРОТОКОЛОВ ПЕРЕДАЧИ ДАННЫХ И ПРЕИМУЩЕСТВА ПРОТОКОЛА MQTT //www. issledo. ru Редакционная коллегия. – С. 75.
- Жарлыкасов Б. Ж., Мауленов К. С. Методы экстракции признаков изображения с целью поиска и распознавания лиц //Новые информационные технологии в образовании и науке. – 2018. – №. 1. – С. 114-117.
- Жарлыкасов Б. Ж., Чубаркова Е. В. Использование метода яркостных гистограмм для решения задачи детектирования движения объектов на нерегулируемых пешеходных переходах //Современная наука: актуальные проблемы теории и практики. Серия: Естественные и Технические Науки. – 2019. – №. 2. – С. 31-34.
- Мауленов К. С., Жарлыкасов Б. Ж. Распознавание образов для задач поиска и идентификации //Наука. Информатизация. Технологии. Образование. – 2018. – С. 538-543.
- Zharlykasov B. J., Abatov N. T. SOFTWARE MODEL OPEN COMPUTING LANGUAGE //Экономика и социум. – 2016. – №. 6-3. – С. 356-359.
- Zharlykasov B. J., Abatov N. T. BINARY AND RED-BLACK TREES. TIME SEARCH //Теория и практика современной науки. – 2016. – №. 6-1. – С. 6-9.
- Мауленов К. С., Жарлыкасов Б. Ж., Чубаркова Е. В. Разреженное представление изображений в задачах распознавания с использованием идеи метода Монте-Карло //Современная наука: актуальные проблемы теории и практики. Серия: Естественные и Технические Науки. – 2019. – №. 2. – С. 35-38.
- Shimanskiy N. D., Zharlykasov B. Z., Muslimova A. Z. COMPARISON OF FEATURE DESCRIPTORS //Евразийский союз ученых. – 2014. – №. 8-8. – С. 107-112.
