Сравнение методов формирования функции распределения по времени в среде моделирования GPSS для многоканальной СМО с бесконечным буфером

Автор: Галимов Р.З., Золотов А.А., Третьякова А.А.
Журнал: Форум молодых ученых @forum-nauka
Статья в выпуске: 12 (16), 2017 года.
Бесплатный доступ
В статье проведено исследование способов задания функции распределения по времени в среде моделирования GPSS. Выделены три сравниваемых подхода: по точкам, библиотечный, с помощью Гамма-функции. Рассмотрена часто встречающаяся в рамках имитационного моделирования многоканальная система массового обслуживания с бесконечным буфером. Вычислены такие показатели, как количество заявок в системе и время нахождения заявок в системе. Произведено сравнение с результатами аналитического моделирования и вычислена относительная погрешность полученных результатов.
Имитационное моделирование, задание функций, гамма-функция, библиотечные функции, функции по точкам, точность функций распределения времени
Короткий адрес: https://sciup.org/140277717
IDR: 140277717
Текст научной статьи Сравнение методов формирования функции распределения по времени в среде моделирования GPSS для многоканальной СМО с бесконечным буфером
В современном мире имитационное моделирование играет ключевую роль в анализе данных и предварительном расчете различных динамических систем. С помощью данного вида моделирования можно построить достаточно точную (в некотором приближении и с некоторыми погрешностями) модель любой сложной системы. Имитационная модель с определенной погрешностью показывает результаты функционирования реальной системы в заданных начальных условиях.
Моделирование – это метод решения задач, когда исходная (реальная) система заменяется на более простой объект, описывающий реальную систему с некоторыми допущениями, который называется моделью [2].
Имитационное моделирование применяется в различных ситуациях, например, когда эксперименты на реальной модели невозможно провести или это экономически нецелесообразно.
Имитационное моделирование – это компьютерная программа на языке имитационного моделирования (например, GPSS, Simio и др.), которая в некотором приближении описывает структуру реально существующей модели и воспроизводит ее динамическое поведение во времени.
Имитационная модель не только по свойствам, но и структуре соответствуют моделируемому объекту. Более того имеется однозначное соответствие между процессами, проходящими в имитационной модели. Существенным недостатком имитационной модели является большое время решения задачи для получения хорошей точности результатов [3].
Результатами работы модели являются значения вычисления некоторой функции от большого числа стохастически изменяющихся параметров. Как ни парадоксально, но стахастика имеет свой плюс и минус в имитационном моделировании. Элемент стохастического моделирования поведения системы оказывает положительное влияние, так как возможен разброс параметров и существует возможность получить средние или усредненные результаты. С другой стороны, требуется многократное повторение эксперимента, чтобы получился «хороший» набор экспериментальных данных. Это увеличивает время нахождения параметров функционирования системы. После проведение экспериментов обязательна обработка результатов имитационного моделирования. Чаще всего в моделях применяется статистическое моделирование, то есть воспроизведение в моделях случайных факторов, событий, величин, полей.
Стохастическое моделирование применяется в различных областях знаний и решает множество прикладных задач. Также оно применяется для исследования поведения сложных динамических систем и их последующей оценки и анализа.
В данной статье языком имитационного моделирования будет выступать язык GPSS. В языке GPSS возможно различные способы задания функций:
-
• Вызов нужной функции из библиотеки;
-
• Построение функции по точкам;
-
• Задание любой произвольной функции с помощью Гамма-функции.
В статье будет приведен анализ данных, полученных тремя способами задания функций, а также их сравнение с аналитическим моделированием. Будут посчитаны погрешности каждого из данных способов задания.
Смоделируем многоканальную систему с бесконечным буфером. Модель системы представлена на рис. 1.
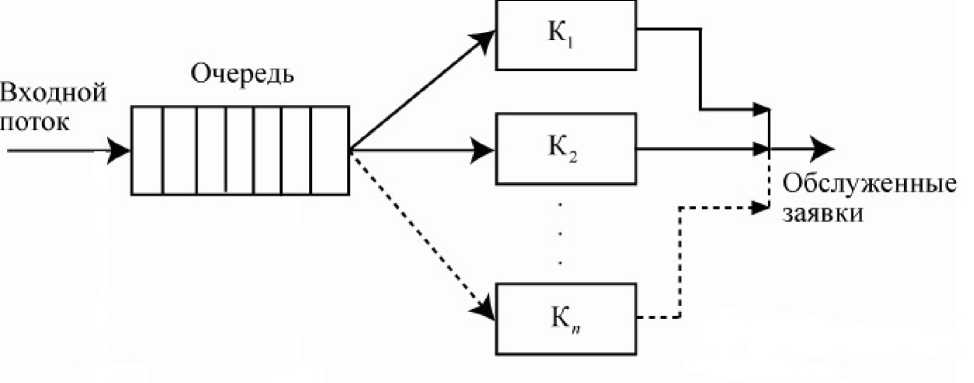
Рисунок №1. Схематическое изображение применяемой системы массового обслуживания.
Данная модель описывает широкий класс исследовательских задач и часто применяется на практике, что свидетельствует о способности корректно отображать поведение большого количества систем реального мира.
На рис.1 видно, что модель состоит из трех частей:
-
• Входящий поток заявок (вход системы);
-
• Очередь заявок на обслуживания (буфер системы);
-
• Обслуживающие аппараты (обслуживают заявки по заданному временному закону).
Функции распределения времени для входного потока и для обслуживания могут быть заданы различными способами, описанными выше. Рассмотрим влияние способов задания функции распределения времени и проанализируем погрешности каждого из способов задания и дадим оценку применимости того или иного способа.
Различные способы задания функций в языке имитационного моделирования
GPSS
Как отмечено выше, среда имитационного моделирования GPSS поддерживает несколько способов задания функций распределения времени [1]. Опишем более подробно вышеизложенные способы.
Задание функции распределения времени с помощью библиотечных функций
Язык имитационного моделирования поддерживают более чем десяток различных функций распределения времени. Среди них: экспоненциальная функция, функция Эрланга, биноминальная функция, нормальная функция и многие другие. Данные функции уже включены в пакет языка GPSS. Чтобы их использовать достаточно посмотреть справочник по языку GPSS, определить параметры, и функция будет работать. Это один из самых простых способов задания функций в языке имитационного моделирования GPSS.
Задание функции распределения времени по точкам
В языке имитационного моделирования GPSS также можно использовать способ задания функций распределения времени по точкам. Данный способ удобен, когда у исследователя есть точечное задание функции или функция не может быть определена формулой. Для этого вводится набор точек и далее в тексте имитационной программы вызывается данная функция. Такой способ весьма удобен при исследовании неизвестных функций распределения времени с большим набором статистических данных.
Функция, которая будет использоваться в экспериментах:
EXPON FUNCTION RN1,C23
0,0/.1,.104/.2,.222/.3,.355/.4,.510/.5,.69/.6,.915/.7,1.2/.75,1.37/.8,1.5/.84,1.83/.88,2.12/.9,2.3/.92, 2.52/.94,2.82/.95,2.98/.96,3.2/.97,3.5/.98,3.9/.995,5.3/.998,6.2/.9995,7/1,8
Задание функции распределения времени с помощью Гамма-функции
В языке имитационного моделирования GPSS также можно использовать Гамму-функцию для задания различных (произвольных) распределений. Данный способ весьма сложен, потому что требует некоторой предварительной обработки времен задания и среднего времени обслуживания. Зато данный способ подходит для моделирования любых распределений одной функцией (Гамма-функцией).
Исследование погрешности различных способов задания функций в языке имитационного моделирования GPSS
Для проведения эксперимента составим полный план эксперимента. Будем варьировать количество обслуживающих аппаратов С , а также загруженность системы р . План эксперимента представлен в таблице 1.
Таблица №1. План проводимого эксперимента
|
№ эксперимента |
С |
Р |
|
1 |
1 |
0,2 |
|
2 |
2 |
0,2 |
|
3 |
3 |
0,2 |
|
4 |
4 |
0,2 |
|
5 |
5 |
0,2 |
|
6 |
1 |
0,4 |
|
7 |
2 |
0,4 |
|
8 |
3 |
0,4 |
|
9 |
4 |
0,4 |
|
10 |
5 |
0,4 |
|
11 |
1 |
0,6 |
|
12 |
2 |
0,6 |
|
13 |
3 |
0,6 |
|
14 |
4 |
0,6 |
|
15 |
5 |
0,6 |
|
16 |
1 |
0,8 |
|
17 |
2 |
0,8 |
|
18 |
3 |
0,8 |
|
19 |
4 |
0,8 |
|
20 |
5 |
0,8 |
Всего проведём 20 экспериментов. В соответствие с данным планом будет проводится имитационное моделирование для различных способов задания функций распределения времени, а также аналитическое моделирование. После этого будет проведён анализ и оценка погрешностей. За эталон будем принимать результаты аналитического моделирования.
Всего будет использоваться две основные формулы. Следующая формула определяет количество заявок в системе [5]:
L =
( К 2 вар .вх + К 2 обсл.вх ) Срс + 1 2(1 - Р С )
+ Ср
где L -количество заявок в системе;
К 2 вар . вх - коэффициент Эрланга для входных заявок;
К 2 обсл.вх - коэффициент Эрланга для процесса обслуживания;
С- количество обслуживающих аппаратов;
р - загруженность системы.
К 2 вар . вх , К 2 обсл.вх для экспоненциального распределения принимаем за 1.
Вычислим временя пребывания в системе [5]:
Т = L * Тх вх
, где Т – время пребывания в системе заявок;
L - количество заявок в системе;
Твх - расчётное время для аналитической модели.
С помощью (1,2) можно рассчитать время пребывания заявки в системе и количество заявок, находящихся в системе.
Результаты аналитического моделирования приведены в таблице 2.
Таблица №2. Результаты аналитического моделирования.
|
Аналитическое модели |
рование |
|||
|
№ |
С |
р |
L |
T |
|
1 |
1 |
0,2 |
0,25 |
75 |
|
2 |
2 |
0,2 |
0,416667 |
62,5 |
|
3 |
3 |
0,2 |
0,604839 |
60,48387 |
|
4 |
4 |
0,2 |
0,801282 |
60,09615 |
|
5 |
5 |
0,2 |
1,00032 |
60,01921 |
|
6 |
1 |
0,4 |
0,666667 |
100 |
|
7 |
2 |
0,4 |
0,952381 |
71,42857 |
|
8 |
3 |
0,4 |
1,282051 |
64,10256 |
|
9 |
4 |
0,4 |
1,642036 |
61,57635 |
|
10 |
5 |
0,4 |
2,020692 |
60,62076 |
|
11 |
1 |
0,6 |
1,5 |
150 |
|
12 |
2 |
0,6 |
1,875 |
93,75 |
|
13 |
3 |
0,6 |
2,295918 |
76,53061 |
|
14 |
4 |
0,6 |
2,757353 |
68,93382 |
|
15 |
5 |
0,6 |
3,252949 |
65,05899 |
|
16 |
1 |
0,8 |
4 |
300 |
|
17 |
2 |
0,8 |
4,444444 |
166,6667 |
|
18 |
3 |
0,8 |
4,918033 |
122,9508 |
|
19 |
4 |
0,8 |
5,420054 |
101,626 |
|
20 |
5 |
0,8 |
5,949548 |
89,24322 |
Далее проведем 3 серии экспериментов для различного способа задания функций распределения времени. Результаты имитационного моделирования представлены в таблице 3.
Таблица №3. Результаты имитационного моделирования для различных способов задания функций распределения времени.
|
Исходные данные |
Способ задания функции распределения времени |
|||||||||
|
Гамма-функция |
Экспоненциальная функция |
По точкам |
||||||||
|
№ |
С |
ρ |
Tвх |
Tобс |
L |
T |
L |
T |
L |
T |
|
1 |
1 |
0,2 |
300 |
60 |
0,25 |
75,135 |
0,25 |
75,135 |
0,248 |
74,469 |
|
2 |
2 |
0,2 |
150 |
60 |
0,417 |
62,582 |
0,417 |
62,582 |
0,414 |
62,158 |
|
3 |
3 |
0,2 |
100 |
60 |
0,607 |
60,715 |
0,607 |
60,715 |
0,604 |
60,348 |
|
4 |
4 |
0,2 |
75 |
60 |
0,804 |
60,273 |
0,804 |
60,273 |
0,799 |
59,908 |
|
5 |
5 |
0,2 |
60 |
60 |
1,003 |
60,193 |
1,003 |
60,193 |
0,997 |
59,798 |
|
6 |
1 |
0,4 |
150 |
60 |
0,668 |
100,215 |
0,668 |
100,215 |
0,664 |
99,534 |
|
7 |
2 |
0,4 |
75 |
60 |
0,952 |
71,453 |
0,952 |
71,453 |
0,949 |
71,131 |
|
8 |
3 |
0,4 |
50 |
60 |
1,296 |
64,822 |
1,296 |
64,822 |
1,288 |
64,396 |
|
9 |
4 |
0,4 |
37,5 |
60 |
1,665 |
62,438 |
1,665 |
62,438 |
1,654 |
61,976 |
|
10 |
5 |
0,4 |
30 |
60 |
2,041 |
61,267 |
2,041 |
61,267 |
2,032 |
60,916 |
|
11 |
1 |
0,6 |
100 |
60 |
1,506 |
150,611 |
1,506 |
150,611 |
1,498 |
149,616 |
|
12 |
2 |
0,6 |
50 |
60 |
1,869 |
93,584 |
1,869 |
93,584 |
1,865 |
93,156 |
|
13 |
3 |
0,6 |
33,3 |
60 |
2,338 |
77,959 |
2,338 |
77,959 |
2,33 |
77,563 |
|
14 |
4 |
0,6 |
25 |
60 |
2,831 |
70,848 |
2,831 |
70,848 |
2,822 |
70,5 |
|
15 |
5 |
0,6 |
20 |
60 |
3,358 |
67,199 |
3,358 |
67,199 |
3,345 |
66,822 |
|
16 |
1 |
0,8 |
75 |
60 |
4,039 |
303,058 |
4,039 |
303,058 |
4,059 |
303,846 |
|
17 |
2 |
0,8 |
37,5 |
60 |
4,414 |
165,698 |
4,414 |
165,698 |
4,439 |
166,132 |
|
18 |
3 |
0,8 |
25 |
60 |
5,027 |
125,841 |
5,027 |
125,841 |
4,987 |
124,503 |
|
19 |
4 |
0,8 |
18,75 |
60 |
5,58 |
104,731 |
5,58 |
104,731 |
5,568 |
104,314 |
|
20 |
5 |
0,8 |
15 |
60 |
6,197 |
93,069 |
6,197 |
93,069 |
6,198 |
92,849 |
Сравним полученные результаты и проведем анализ. Как уже было сказано выше, за эталон возьмем результаты аналитического моделирования и относительно них будем считать погрешность данных способов задания. Оценка погрешностей представлена в таблице 4.
Таблица №4. Оценка погрешностей между имитационным и аналитическим моделированием.
|
Исходные данные |
Гамма-функция |
Экспоненциальная функция |
По точкам |
|||||
|
№ |
С |
ρ |
ΔL,% |
ΔT,% |
ΔL,% |
ΔT,% |
ΔL,% |
ΔT,% |
|
1 |
1 |
0,2 |
0 |
0,002 |
0 |
0,002 |
0,008 |
0,007 |
|
2 |
2 |
0,2 |
0,001 |
0,001 |
0,001 |
0,001 |
0,006 |
0,005 |
|
3 |
3 |
0,2 |
0,004 |
0,004 |
0,004 |
0,004 |
0,001 |
0,002 |
|
4 |
4 |
0,2 |
0,003 |
0,003 |
0,003 |
0,003 |
0,003 |
0,003 |
|
5 |
5 |
0,2 |
0,003 |
0,003 |
0,003 |
0,003 |
0,003 |
0,004 |
|
6 |
1 |
0,4 |
0,002 |
0,002 |
0,002 |
0,002 |
0,004 |
0,005 |
|
7 |
2 |
0,4 |
0 |
0 |
0 |
0 |
0,004 |
0,004 |
|
8 |
3 |
0,4 |
0,011 |
0,011 |
0,011 |
0,011 |
0,005 |
0,005 |
|
9 |
4 |
0,4 |
0,014 |
0,014 |
0,014 |
0,014 |
0,007 |
0,006 |
|
10 |
5 |
0,4 |
0,01 |
0,011 |
0,01 |
0,011 |
0,006 |
0,005 |
|
11 |
1 |
0,6 |
0,004 |
0,004 |
0,004 |
0,004 |
0,001 |
0,003 |
|
12 |
2 |
0,6 |
0,003 |
0,002 |
0,003 |
0,002 |
0,005 |
0,006 |
|
13 |
3 |
0,6 |
0,018 |
0,019 |
0,018 |
0,019 |
0,015 |
0,013 |
|
14 |
4 |
0,6 |
0,027 |
0,028 |
0,027 |
0,028 |
0,023 |
0,023 |
|
15 |
5 |
0,6 |
0,032 |
0,033 |
0,032 |
0,033 |
0,028 |
0,027 |
|
16 |
1 |
0,8 |
0,01 |
0,01 |
0,01 |
0,01 |
0,015 |
0,013 |
|
17 |
2 |
0,8 |
0,007 |
0,006 |
0,007 |
0,006 |
0,001 |
0,003 |
|
18 |
3 |
0,8 |
0,022 |
0,024 |
0,022 |
0,024 |
0,014 |
0,013 |
|
19 |
4 |
0,8 |
0,03 |
0,031 |
0,03 |
0,031 |
0,027 |
0,026 |
|
20 |
5 |
0,8 |
0,042 |
0,043 |
0,042 |
0,043 |
0,042 |
0,04 |
Из таблицы видно, что погрешности минимальны и не превышают 1%. Значит все 3
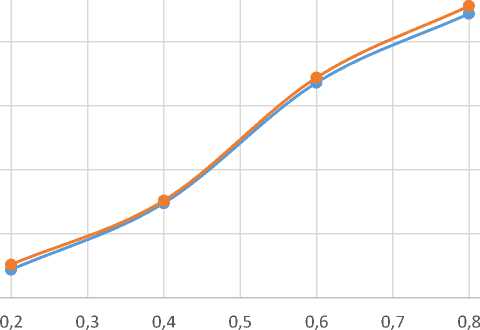
способа задания распределения функции времени уместны и применимы для инженерных расчётов. Посчитаем среднюю погрешность в зависимости от загрузки системы. Для более наглядного примера построим график. График представлен на рис. 2.
Зависимость погрешности от загрузки системы
0,025
Загрузка системы
0,9
1 ■ 0,02
I CD =Г О c" 0,015 00
I—
° 0,01
a a> CL
О 0,005 c
Рисунок №2. Зависимость погрешности от загрузки системы.
Как видно из приведенного графика, погрешности в оценки количества заявок в системе и времени из пребывания в системе возрастают с ростом загрузки системы. Таким образом, точность при задании функции распределения по времени снижается при возрастании нагрузки на систему обслуживания. Однако даже при рекомендованном значении загрузки не более 75% для инженерных задач является незначительной величиной.
Из приведенного исследования видно, что погрешность между разными способами задания функций распределения времени не превышает 1%, значит они все пригодны для проведения инженерных расчетов. Разница между ними состоит в том, что каждый способ задания полезен и применим лишь в определенных условиях. Поэтому исследователь сам выбирает каким способом задания функций распределения времени пользоваться и какой способ ему удобен. Иногда данные способы взаимозаменяемые, что свидетельствует о хорошем инструменте моделирования в имитационной среде GPSS.
Список литературы Сравнение методов формирования функции распределения по времени в среде моделирования GPSS для многоканальной СМО с бесконечным буфером
- Боев В. Д. Моделирование систем. Инструментальные средства GPSS World: Учеб. пособие. - СПб.: БХВ-Петербург, 2004. - 368 с.
- Кирпичников А.П. Прикладная теория массового обслуживания. Казань: КГУ, 2008. 118 с.
- Карташевский В.Г. Основы теории массового обслуживания. М.: Радио и связь, 2006. 107 с.
- Кудрявцев Е. М. GPSS World. Основы имитационного моделирования различных систем. - М.: ДМК Пресс, 2004. - 320с.
- Галимов Р.З, Золотов А.А. Исследование применимости методов аналитического и имитационного моделирования в зависимости от загруженности системы. // Молодежный научный вестник - 2017, №12 - декабрь. [Электронный ресурс]. Режим доступа: http://www.mnvnauka.ru/2017/12/Galimov.pdf
