Сравнительный анализ репозиционных возможностей ортопедического гексапода Орто-СУВ и его минимизированной («педиатрической») версии (экспериментальное исследование)
 версии (экспериментальное исследование)")
Автор: Гаврилов Дмитрий Викторович, Соломин Леонид Николаевич
Журнал: Гений ортопедии @geniy-ortopedii
Рубрика: Оригинальные статьи
Статья в выпуске: 3 т.29, 2023 года.
Бесплатный доступ
Введение. В настоящее время ортопедические гексаподы эффективно применяются для коррекции деформаций длинных костей, стопы и крупных суставов как у взрослых, так и у детей. Ранее проведенные исследования продемонстрировали превосходство репозиционных возможностей ортопедического гексапода Орто-СУВ (Ortho-SUV Frame, OSF) в сравнении с другими моделями данной группы чрескостных аппаратов. Однако репозиционные возможности минимизированной версии этого гексапода (minimized Ortho-SUV Frame, OSFm) не были исследованы. Цель. Определить репозиционные возможности OSFm в сравнении с возможностями OSF. Материалы и методы. Эксперимент выполнен с использованием пластиковых моделей большеберцовой кости. Для фиксации каждого из костных фрагментов были использованы однокольцевые модули. В первой серии экспериментов исследовали репозиционные возможности OSFm, во второй серии - OSF. Исследовались три группы в зависимости от способа фиксации страт к кольцам: непосредственно к кольцу, с использованием прямых платиков и с использованием Z-образных платиков. Репозиционные возможности оценивались по величине максимального смещения дистального костного фрагмента относительно проксимального по ширине, под углом, при ротации и при дистракции. Результаты. Величина максимальной дистракции OSF и OSFm при фиксации страт непосредственно к кольцам и при использовании прямых платиков одинакова (p > 0,05). При использовании Z-образных платиков OSFm превосходит OSF на 27,3 %. По возможностям плоскопараллельного перемещения OSFm превосходит OSF на 2,8-29,3 %. По возможностям углового перемещения OSFm превосходит OSF на 29,6-55,4 %. При исследовании ротационного перемещения выяснено, что OSFm превосходит возможности OSF на 20,3-41,3 %. Обсуждение. Результаты экспериментального исследования демонстрируют, что конструктивные особенности OSFm определяют обоснованное превосходство над OSF по репозиционным возможностями. Заключение. Полученные данные свидетельствуют о том, что OSFm, в сравнении с OSF, обладает лучшими возможностями по коррекции деформаций.
Чрескостный остеосинтез, коррекция деформаций, ортопедический гексапод, репозиционные возможности
Короткий адрес: https://sciup.org/142238195
IDR: 142238195 | УДК: [616.71-001.5-089.227.84:004.9]-092.4 | DOI: 10.18019/1028-4427-2023-29-3-270-276
Comparative analysis of the reduction capabilities of orthopedic hexapod Ortho-SUV frame and its minimized (pediatric) version (experimental study)
Introduction Currently, orthopedic hexapods have been effectively used for long bone, foot and large joint deformity correction in both adults and children. Previous studies demonstrated the superiority of the reduction capabilities of the orthopedic hexapod Ortho-SUV Frame (OSF) in comparison with other designs of external fixation devices. However, the reduction capabilities of the minimized version of this hexapod (minimized Ortho-SUV Frame, OSFm) have not been studied yet. Purpose To identify the reduction capabilities of OSFm compared to OSF. Materials and methods The bench test was performed using plastic models of the tibia osteotomized at the middle third of the shaft. One-ring modules were used to fix each of the bone fragments. In the first series of the experiment, the reduction capabilities of OSFm with a standard strut size and in the second series OSF with a short strut size were studied. In each series of experiments, three groups were studied depending on the method of fixing the struts to the rings: directly to the ring, using straight plates, and using Z-shaped plates. Reduction capabilities were assessed by the maximum displacement of the distal bone fragment relative to the proximal one in distraction, translation, angulation, and rotation. Results The magnitude of the maximum distraction of OSF and OSFm with fixation of the struts directly to the rings and with the use of straight plates is the same (p > 0.05). With Z-plates, OSFm outperforms OSF by 27.3 %. OSFm surpasses OSF by 2.8-29.3 % in terms of the planar-parallel movement. OSFm surpasses OSF by 29.6-55.4% in terms of angular movement capabilities. The study of rotational movement found that OSFm exceeds the capabilities of OSF by 20.3-41.3%. Conclusion The findings obtained indicate that OSFm, in comparison with OSF, has better deformity correction capabilities.
Текст научной статьи Сравнительный анализ репозиционных возможностей ортопедического гексапода Орто-СУВ и его минимизированной («педиатрической») версии (экспериментальное исследование)
При многокомпонентных многоплоскостных деформациях длинных костей, а также среднего и заднего отделов стопы, обосновано использование
ортопедических гексаподов [1-9]. Данная группа чрескостных аппаратов снабжена универсальным репозиционным узлом, работающим на основе ком-
пьютерной навигации и позволяющим устранить все компоненты деформации одновременно без необходимости многократной замены репозиционных узлов и с более высокой точностью [10-13].
На данный момент в мире известно более 20 моделей ортопедических гексаподов [1, 8, 14, 15]. Одним из них является чрескостный аппарат Орто-СУВ (Ortho-SUV Frame, OSF), эффективно применяющийся при коррекции деформаций как у взрослых, так и у детей [1, 3, 4, 16-18]. Ранее проведенные исследования достоверно обосновали преимущества использования аппарата Орто-СУВ по сравнению с другими ортопедическими гексаподами по репози-ционным возможностям [2].
Однако аппарат Орто-СУВ, как и другие ортопедические гексаподы, в сравнении с аппаратом Илизарова обладает такими недостатками как громоздкость
и большой вес внешней конструкции. Также имеется объективное ограничение при работе с «короткими сегментами» конечностей, т.е. при расположении опор на близком, 10-12 см и менее, расстоянии. Подобные случаи часто возникают в педиатрической практике и при коррекции деформации стоп [12, 16, 17, 19]. Использование “extra short” типоразмеров страт, Z-образных платиков и «свободных» колец не позволяют решить эту проблему в полной мере [4, 15, 20-23]. Как альтернативный вариант была разработана «минимизированная версия ортопедического гексапода Орто-СУВ» (minimized Ortho-SUV frame, OSFm) [14, 17].
Цель – определить репозиционные возможности минимизированной версии ортопедического гексапода Орто-СУВ (minimized Ortho-SUV Frame, OSFm) в сравнении с возможностями стандартной версии ортопедического гексапода Орто-СУВ (Ortho-SUV Frame, OSF).
МАТЕРИАЛЫ И МЕТОДЫ
OSFm отличается от OSF уменьшением длины кардана на 5 мм и узла изменения длины страты на 6 мм. Также уменьшены размеры прямых платиков на 0,5 мм по высоте, 5 мм по длине и 3 мм по ширине, а Z-образных платиков на 0,5 мм по высоте, 18 мм по длине и 3 мм по ширине. Это позволило уменьшить вес аппарата OSFm на 314 г (общий вес 1001 г), при комплектации прямыми платиками на 518 г (общий вес 1438 г) и на 614 г при комплектации Z-образными пла-тиками (общий вес 1618 г). Минимально возможная длина страты OSFm 82 мм, OSF – 94 мм. Максимально возможная длина страты OSFm 225 мм, OSF – 213 мм.
В данном экспериментальном исследовании под понятием «репозиционные возможности» рассматривалась возможность аппарата Орто-СУВ перемещать дистальный костный фрагмент относительно проксимального на определенное расстояние или под определенным углом. Эксперимент выполнялся с использованием пластиковых моделей большеберцовой кости длиной 370 мм, поперечно рассеченных на уровне средней трети. Имитаторы костных фрагментов располагались в центре кольцевых опор диаметром 140 мм. Исходное расстояние между опорами определялось средней длиной страты минимизированного ортопедического гексапода Орто-СУВ и составляло 200 мм. Для фиксации каждого костного фрагмента были использованы по два чре-скостных элемента, что было достаточно для стабильной фиксации костных фрагментов для данного типа исследований. Согласно методу унифицированного обозначения чрескостного остеосинтеза (МУОЧО) компоновка аппарата обозначается следующим образом:
II,12,90; III, 9 -3
– OSF –
VI, 3 -9; VII,12,90
В первой серии экспериментов исследовали репо-зиционные возможности OSFm со стандартным типоразмером страт. Во второй серии исследовали репози-ционные возможности OSF c коротким типоразмером страт. Страты фиксировались к опорам таким образом, что карданы являлись вершинами равносторон-
них треугольников. Страта № 1 всегда располагалась по передней поверхности базового кольца. Маркеры шкал узлов изменения длины каждой из страт были установлены на среднее значение. В каждой серии экспериментов были исследованы три группы в зависимости от способа фиксации страт к кольцам: непосредственно к кольцу, с использованием прямых платиков и с использованием Z-образных платиков. При методе фиксации при помощи прямых и Z-образных плати-ков использовались одновременно все шесть штук на проксимальном и дистальном кольцах. Фиксация страт к кольцам при помощи Z-образных платиков была возможна только при расположении их кнутри между опорами, то есть по направлению друг к другу. Расположение одновременно всех шести Z-образных платиков кнаружи от опор было ограничено из-за недостатка длины страт.
Репозиционные возможности оценивались по величине максимального смещения дистального костного фрагмента относительно проксимального:
-
1) по продольной оси (дистракция) (рис. 1);
-
2) плоскопараллельно во фронтальной плоскости (кнутри и кнаружи) и в сагиттальной плоскости (кпереди и кзади) (рис. 2);
-
3) под углом во фронтальной плоскости (варизация и вальгизация) и в сагиттальной плоскости (антекурва-ция и рекурвация) (рис. 3);
-
4) при ротации (кнутри и кнаружи) (рис. 1).
При оценке плоскопараллельных перемещений и перемещения по продольной оси за контрольные точки принимали края кортикальных пластинок с той стороны, в которую выполнялось смещение.
При оценке угловых перемещений модель с максимально возможным положением костного фрагмента фотографировали на цифровую фотокамеру строго во фронтальной или сагиттальной плоскостях. На полученных цифровых изображениях замеряли угол, образованный средне-диафизарными линиями костных фрагментов, используя возможности графического редактора Adobe Photoshop.
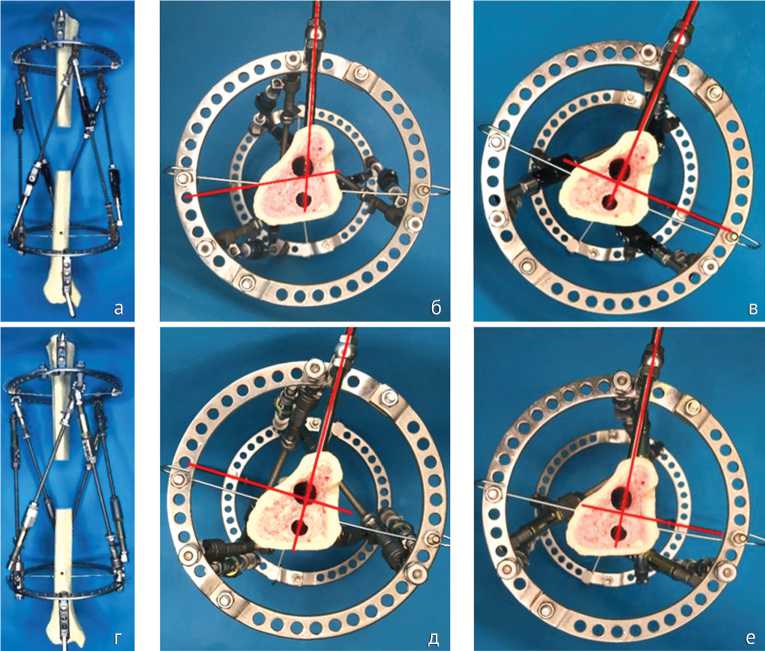
Рис. 1. Перемещения дистального костного фрагмента: а – по длине аппаратом OSFm; б – при ротации кнутри аппаратом OSFm; в – при ротации кнаружи аппаратом OSFm; г – по длине аппаратом OSF; д – при ротации кнутри аппаратом OSF; е – при ротации кнаружи аппаратом OSF
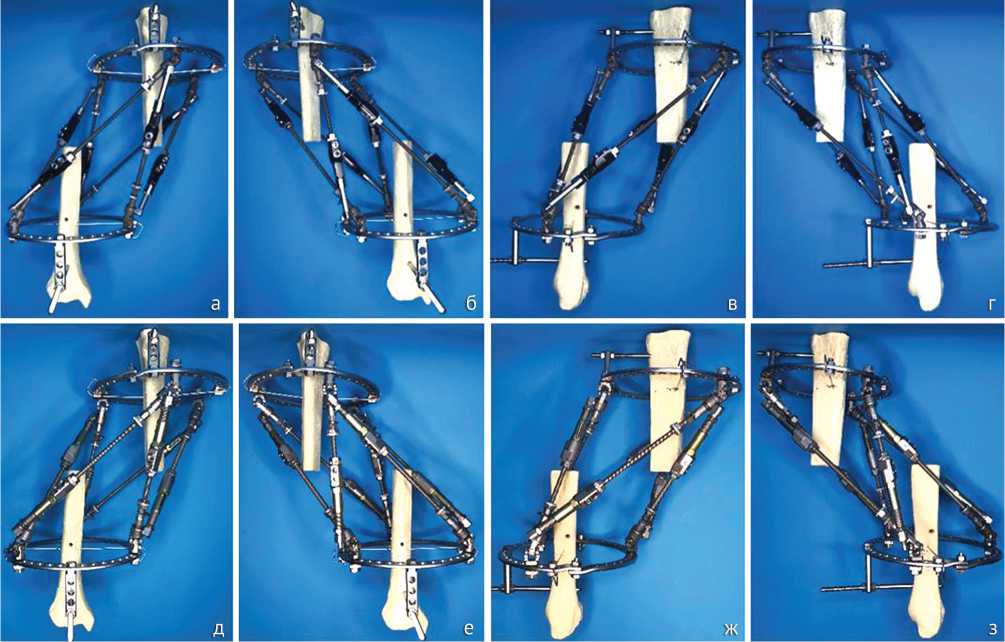
Рис. 2. Плоскопараллельные перемещения дистального костного фрагмента: а – во фронтальной плоскости кнаружи аппаратом OSFm; б – во фронтальной плоскости кнутри аппаратом OSFm; в – в сагиттальной плоскости кпереди аппаратом OSFm; г – в сагиттальной плоскости кзади аппаратом OSFm; д – во фронтальной плоскости кнаружи аппаратом OSF; е – во фронтальной плоскости кнутри аппаратом OSF; ж – в сагиттальной плоскости кпереди аппаратом OSF; з – в сагиттальной плоскости кзади аппаратом OSF
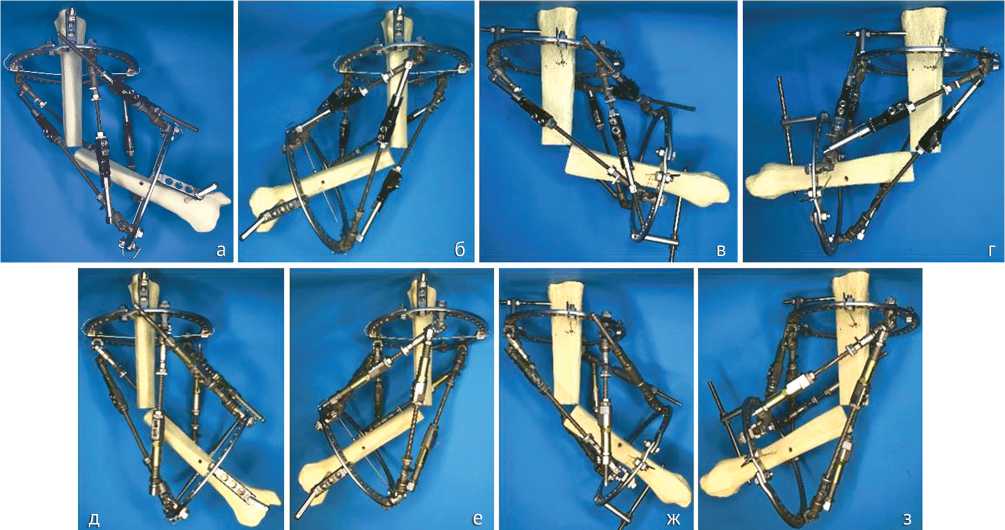
Рис. 3. Угловые перемещения дистального костного фрагмента: а – варусное во фронтальной плоскости аппаратом OSFm; б – вальгусное во фронтальной плоскости аппаратом OSFm; в – антекурвация в сагиттальной плоскости аппаратом OSFm; г – рекурвация в сагиттальной плоскости аппаратом OSFm; д – варусное во фронтальной плоскости аппаратом OSF; е – вальгусное во фронтальной плоскости аппаратом OSF; ж – антекурвация в сагиттальной плоскости аппаратом OSF; з – рекурвация в сагиттальной плоскости аппаратом OSF
Для оценки величины ротации в проксимальный и дистальный костные фрагменты в позиции 12, строго друг напротив друга, были введены стержни, которые образовывали угол при ротационном смещении дистального фрагмента. Угол между этими стержнями определяли при фотографировании строго в горизонтальной плоскости на цифровую фотокамеру модели с максимально возможной ротацией дистального костного фрагмента. Затем на полученных цифровых изображениях замеряли угол, используя возможности графического редактора Adobe Photoshop.
Линейные перемещения измеряли в миллиметрах (мм), угловые – в градусах (º). Выполнение смещения прекращали при условии, когда любая из страт
достигала своей минимально или максимально возможной длины, что являлось ограничением для последующего перемещения фрагмента. Было собрано по шесть каждой из исследуемых моделей. Для получения статистически значимых данных эксперимент с каждой из шести моделей повторяли пять раз. Таким образом, всего было выполнено 180 серий экспериментов. Полученные количественные данные были статистически обработаны в программе Statistica v10.1. Для сравнения смещений использовали критерии Манна-Уитни, медианный хи-квадрат и модуль ANOVA. Различия между группами считались статистически значимыми при уровне значимости p < 0,05.
РЕЗУЛЬТАТЫ
Результаты исследований возможностей «дистракции» и плоскопараллельных перемещений представлены на рисунке 4, угловых и ротационных перемещений – на рисунке 5. При исследовании параметра «дистракция» выяснено, что при фиксации страт непосредственно к кольцам и при использовании прямых платиков достоверных отличий между OSF и OSFm не наблюдалось (p > 0,05). При использовании Z-образных плати-ков OSFm превосходит возможности OSF на 25,3 мм (p < 0,05) (рис. 4). Результаты плоскопараллельных, угловых и ротационных перемещений при всех методах фиксации страты демонстрируют статистически значимые отличия между OSFm и OSF (p < 0,05).
По возможностям плоскопараллельного перемещения кнаружи OSFm с фиксацией страт непосредственно к кольцам превосходит OSF на 6 мм и кнутри на 3,3 мм. Соответственно, при использовании прямых платиков показатели OSFm превосходят OSF кнаружи на 6,1 мм
и кнутри на 5,2 мм, а при использовании Z-образных платиков кнаружи на 21,6 мм и кнутри на 15,8 мм. При плоскопараллельном перемещении в сагиттальной плоскости кпереди OSFm с фиксацией страт непосредственно к кольцам превосходит OSF на 9,8 мм и кзади на 11,3 мм. Соответственно, при использовании прямых платиков показатели OSFm превосходят OSF кпереди 7,3 мм и кзади на 8,5 мм и при использовании Z-образных платиков OSFm превосходит OSF кпереди 27,5 мм и кзади на 29,4 мм (рис. 4).
По возможностям углового перемещения при вариза-ции OSFm с фиксацией страт непосредственно к кольцам превосходит OSF на 18,8º и при вальгизации на 19,5º. Соответственно, при использовании прямых платиков показатели OSFm превосходят OSF при варизации на 19,2º и при вальгизации на 18,1º и при использовании Z-образных пла-тиков при варизации на 17,4º и при вальгизации на 20,1º. При угловом перемещении в сагиттальной плоскости
при антекурвации OSFm с фиксацией страт непосредственно к кольцам превосходит на 17,3º и при рекурвации на 17,4º. Соответственно, при использовании прямых пла-тиков показатели OSFm превосходят OSF при антекурва-ции на 18,4º и при рекурвации на 17,9º и при использовании Z-образных платиков при антекурвации на 18,7º, при ре-курвации OSF превосходит OSFm на 16,9º (рис. 5).
При исследовании ротационного перемещения выяснено, что OSFm превосходит возможности OSF при
фиксации страт непосредственно к кольцам кнаружи на 20,6º и кнутри на 19,8º; при использовании прямых платиков кнаружи на 22,4º и кнутри на 21,6º; при использовании Z-образных платиков кнаружи на 15,3º и кнутри на 15,8º (рис. 5).
Результаты исследований плоскопараллельных, угловых и ротационных перемещений костных фрагментов при использовании ортопедических гексаподов OSF и OSFm представлены в таблице.
Перемещение костных фрагментов по ширине и по продольной оси Угловые перемещения костных фрагментов

по _ кнаружи кнутри кпереди кзади варусное вальгусное антекурвация рекурвация ротация ротация продольной во фронтальной плоскости в сагиттальной плоскости во фронтальной плоскости в сагиттальной плоскости кнаружи кнутри
-
■ OSFm напрямую ■ OSFm прямые платики ■ OSFm Z-образные платики OSF напрямую OSF прямые платики OSF Z-образные платики
Рис. 4. Диаграммы максимально возможных величин плоскопараллельных перемещений и «дистракции» костных фрагментов
Рис. 5. Диаграммы максимально возможных величин угловых и ротационных перемещений костных фрагментов
Таблица
Характеристика репозиционных возможностей ортопедических гексаподов OSF и OSFm (по виду перемещения и способу фиксации костных фрагментов)
|
Вид перемещения |
Способ фиксации |
OSF |
OSFm |
|
По продольной оси |
непосредственно к кольцам |
72,5 ± 1,5 |
71,8 ± 1,3 |
|
прямые платики |
49,4 ± 1,4 |
50,2 ± 1,5 |
|
|
Z-образные платики |
92,7 ± 1 |
118 ± 1,5 |
|
|
Кнаружи во фронтальной плоскости |
непосредственно к кольцам |
105,8 ± 1,6 |
111,8 ± 1,4 |
|
прямые платики |
86,7 ± 1,4 |
92,8 ± 1,7 |
|
|
Z-образные платики |
90,4 ± 1,8 |
112 ± 1,8 |
|
|
Кнутри во фронтальной плоскости |
непосредственно к кольцам |
119,4 ± 1,6 |
122,7 ± 1,1 |
|
прямые платики |
101,2 ± 1,5 |
106,1 ± 1,7 |
|
|
Z-образные платики |
104,5 ± 1,5 |
120,3 ± 1,6 |
|
|
Кпереди в сагиттальной плоскости |
непосредственно к кольцам |
117,9 ± 1,5 |
127,2 ± 1,2 |
|
прямые платики |
90 ± 1,7 |
97,3 ± 1,4 |
|
|
Z-образные платики |
98,8 ± 1,5 |
125,8 ± 1,7 |
|
|
Кзади в сагиттальной плоскости |
непосредственно к кольцам |
114,4 ± 1,4 |
125,3 ± 1,3 |
|
прямые платики |
95,3 ± 2 |
104,7 ± 1,5 |
|
|
Z-образные платики |
100,3 ± 1,5 |
129,7 ± 1,7 |
|
|
Варусное во фронтальной плоскости |
непосредственно к кольцам |
53,1 ± 1,4 |
71,9 ± 1,4 |
|
прямые платики |
49,8 ± 1,7 |
68,2 ± 1,4 |
|
|
Z-образные платики |
62,4 ± 1,8 |
79,2 ± 1,8 |
|
|
Вальгусное во фронтальной плоскости |
непосредственно к кольцам |
54,5 ± 1,2 |
73 ± 1 |
|
прямые платики |
47,6 ± 2 |
66,4 ± 2,1 |
|
|
Z-образные платики |
76,3 ± 1,7 |
96,9 ± 1,7 |
|
|
Антекурвация в сагиттальной плоскости |
непосредственно к кольцам |
56,3 ± 1,3 |
87,5 ± 1,4 |
|
прямые платики |
37,4 ± 2 |
55,1 ± 1,8 |
|
|
Z-образные платики |
59,4 ± 2 |
77 ± 1,8 |
|
|
Рекурвация в сагиттальной плоскости |
непосредственно к кольцам |
57,9 ± 1,7 |
89,9 ± 1,5 |
|
прямые платики |
36,4 ± 1,4 |
53,3 ± 1,6 |
|
|
Z-образные платики |
39,4 ± 1,5 |
53,6 ± 1,7 |
|
|
Ротация кнаружи |
непосредственно к кольцам |
88,1 ± 1,4 |
108,7 ± 1,2 |
|
прямые платики |
54,2 ± 2 |
76,6 ± 1,8 |
|
|
Z-образные платики |
75,2 ± 1,6 |
90,5 ± 1,5 |
|
|
Ротация кнутри |
непосредственно к кольцам |
85,3 ± 1,9 |
105,1 ± 0,9 |
|
прямые платики |
57,6 ± 1,8 |
79,2 ± 1,7 |
|
|
Z-образные платики |
73,4 ± 1,6 |
89,2 ± 1,6 |
Примечание: уровень значимости p < 0,05.
ОБСУЖДЕНИЕ
В настоящее время ортопедические гексаподы используются не только для коррекции многокомпонентных многоплоскостных деформаций длинных трубчатых костей, но и для коррекции деформаций стоп, устранения застарелых вывихов и подвывихов в крупных суставах, а также при лечении контрактур [3, 4, 12, 15-17, 24-26]. Многолетний опыт применения данного типа аппаратов внешней фиксации у взрослых и у детей выявил такие недостатки как громоздкость, сравнительно большой вес конструкций и ограничение использования при работе с «короткими сегментами», т.е. когда расстояние между базовой и мобильной опорами не превышает 10-12 см [16, 17, 19, 22]. Особенно остро «проблема веса и размера» стоит при коррекции деформаций среднего и заднего отделов стоп, т.к. специально разработанные для этой локализации внешние опоры еще более громоздки в сравнении с кольцевыми [17, 19, 26].
Известны две минимизированные модификации стандартных ортопедических гексаподов: Small Bone System и OSFm. Первая из названных создана на основе Orthex-frame и отличается уменьшенными размерами элементов от своего аналога Orthex-frame, Large Bone System [14, 27]. По результатам исследования Orthex-frame продемонстрировал клиническую эффективность при коррекции деформаций у детей и превзошел ортопедический гексапод Taylor Spatial Frame (TSF) по показателям количества перемонтажей, замен страт, перерасчетов в компьютерной программе, плотности регенерата, а также количества и характера осложнений [28]. Целенаправленных сравнительных исследований по определению репозиционных возможностей этой минимизированной версии гексапода не проводилось.
В проведенном ранее исследовании было продемонстрировано превосходство репозиционных возможностей OSF в сравнении с другими ортопедическими гексаподами: TSF и Ilizarov Hexapod Apparatus (IHA) [2]. Однако как повлияла минимизация аппарата OSF на его репозиционные возможности было не известно.
Результаты исследования репозиционных возможностей OSF и его минимизированной версии OSFm продемонстрировали достоверные отличия в большинстве моделируемых перемещений костного фрагмента. Данные отличия наблюдались при всех методах фиксации страт к кольцам: непосредственно напрямую, при использовании прямых и Z-образных платиков.
Выполнение «дистракции» и плоскопараллельных перемещений прекращалось, когда любая из страт достигала максимально возможной длины. По данным показателям OSFm превосходит OSF при всех типах плоскопараллельных смещений как в сагиттальной плоскости, так и во фронтальной. Превосходство OSFm сохраняется при всех трех методах фиксации страт. Это объясняется тем, что максимально возможная длина страты OSFm больше максимально возможной длины страты OSF на 12 мм. Данное преимуще-
ство также обеспечивает превосходство OSFm над OSF при выполнении ротационных смещений.
Однако по показателям «дистракции» при фиксации страты непосредственно напрямую и при помощи прямых платиков достоверных отличий между OSFm и OSF не наблюдалось. Это объясняется тем, что длина кардана OSF больше длины кардана OSFm на 5 мм. При выполнении «дистракции» длина кардана совпадает по направлению с продольной осью смещения костного фрагмента. Данное условие компенсирует превосходство OSFm по максимально возможной длине страты. При использовании Z-образных платиков OSFm превосходит OSF при выполнении «дистракции». Одновременное использование всех шести Z-образных платиков OSF увеличивает расстояние по ширине больше чем Z-образные платики OSFm, так как Z-образный платик OSF больше Z-образного платика OSFm на 18 мм. Таким образом, большее расстояние по ширине уменьшает возможности максимального смещения костного фрагмента по продольной оси.
При выполнении угловых перемещений основным ограничением являлась минимально возможная длина любой из страт. По данным показателям OSFm превосходит OSF при всех типах угловых смещений как в сагиттальной плоскости, так и во фронтальной. Превосходство OSFm сохраняется при всех трех методах фиксации страт. Это объясняется тем, что минимально возможная длина страты OSFm меньше минимально возможной длины страты OSF на 12 мм.
Необходимо специально подчеркнуть, что целью настоящего исследования не было определение максимально возможных репозиционных возможностей, которые могли бы быть обеспечены OSFm и OSF. Полученные результаты зависят только от используемых компоновок исследуемых аппаратов. Каждый исследуемый показатель может быть увеличен за счет изменения расстояния между опорами, угла их наклона, изменения позиций крепления страт, угла их наклона, комбинацией прямых и Z-образных платиков, а также использования дополнительных «свободных» колец [1, 3, 4, 29].
Ограничением данного исследования являлось исключение влияния на репозиционные возможности мягких тканей. Очевидно, что, если хотя бы одна из страт коснётся кожи, дальнейшее перемещение мобильного фрагмента становится невозможным. Однако подобное исследование актуально для разработки «оптимальных» компоновок для коррекции конкретных анатомических локализаций: в особенности для плеча, предплечья, бедра, голени, крупных суставов, стопы [3, 4, 24].
Формально напрашивается вывод, что, поскольку OSFm в целом превосходит репозиционные возможности, обеспечиваемые стандартным OSF, последний (по крайней мере, снабженный коротким типоразмером страт) может быть полностью заменен на OSFm. Однако подтвердить или опровергнуть подобное утверждение сможет только исследование, направленное на определение степени жесткости остеосинтеза, обеспечиваемой OSFm.
ЗАКЛЮЧЕНИЕ
Полученные данные свидетельствуют о том, что OSFm, в сравнении с OSF, обладает лучшими возможностями по коррекции деформаций. Дальнейшие исследования будут связаны с определением жесткости
фиксации костных фрагментов, которую может обеспечить OSFm, а также разработкой оптимальных компоновок для коррекции деформаций длинных костей, крупных суставов и стопы.
Список литературы Сравнительный анализ репозиционных возможностей ортопедического гексапода Орто-СУВ и его минимизированной («педиатрической») версии (экспериментальное исследование)
- Виленский В.А. Разработка основ новой технологии лечения пациентов с диафизарными повреждениями длинных костей на базе чре-скостного аппарата со свойствами пассивной компьютерной навигации: Дис. ... канд. мед. наук. СПб, 2009. 284 с.
- Соломин Л.Н., Виленский В.А., Утехин А.И., Террел В. Сравнительный анализ репозиционных возможностей чрескостных аппаратов, работающих на основе компьютерной навигации, и аппарата Илизарова. Гений ортопедии. 2009;(1):5-10.
- Скоморошко П.В. Оптимизация лечения больных с диафизарными деформациями бедренной кости на основе использования чрескостного аппарата со свойствами пассивной компьютерной навигации: Дис. ... канд. мед. наук. СПб, 2014. 224 с.
- Уханов К.А. Оптимизация чрескостного остеосинтеза при деформациях среднего и заднего отделов стопы: Дис. ... канд. мед. наук. СПб, 2017. 279 с.
- Dammerer D, Kirschbichler K, Donnan L, Kaufmann G, Krismer M, Biedermann R. Clinical value of the Taylor Spatial Frame: a comparison with the Ilizarov and Orthofix fixators. J Child Orthop. 2011;5(5):343-349. doi: 10.1007/s11832-011-0361-3
- Eidelman M, Bialik V, Katzman A. Correction of deformities in children using the Taylor spatial frame. J Pediatr Orthop B. 2006; 15(6):387-395. doi: 10.1097/01.bpb.0000228380.27239.8a
- Eidelman M, Katzman A. Treatment of complex foot deformities in children with the Taylor spatial frame. Orthopedics. 2008;31(10). URL: orthosupersite.com/view.asp?rID=31514
- Paley D. History and science behind the six-axis correction external fixation devices in orthopaedic surgery. Oper Tech Orthop. 2011;21(2):125-128. doi: 10.1053/j.oto.2011.01.011
- Rödl R, Leidinger B, Böhm A, Winkelmann W. Correction of deformities with conventional and hexapod frames - comparison of methods. Z Orthop Ihre Grenzgeb. 2003;141(1):92-98. doi: 10.1055/s-2003-37296. PMID: 12605337
- Eren I, Eralp L, Kocaoglu M. Comparative clinical study on deformity correction accuracy of different external fixators. Int Orthop. 2013;37(11):2247-2252. doi: 10.1007/s00264-013-2116-x
- Manner HM, Huebl M, Radler C, Ganger R, Petje G, Grill F. Accuracy of complex lower-limb deformity correction with external fixation: a comparison of the Taylor Spatial Frame with the Ilizarov ring fixator. J Child Orthop. 2007;1(1):55-61. doi: 10.1007/s11832-006-0005-1
- Memeo A, Montanari L, Priano D, Panuccio E, Rossi L. Congenital clubfoot treatment with external fixation: Italian experience since 2006. Rheumatol Orthop Med. 2020;5:1-7. doi: 10.15761/R0M.1000173
- Koren L, Keren Y, Eidelman M. Multiplanar deformities correction using Taylor Spatial Frame in skeletally immature patients. Open Orthop J. 2016;10:71-79. doi: 10.2174/1874325001610010603
- Iobst C, Ferreira N, Kold S. A Review and Comparison of Hexapod External Fixators. JPOSNA (Journal of the Pediatric Orthopaedic Society of North America). 2023;5(1). doi: 10.55275/JP0SNA-2023-627
- Sessa P, Biancucci G, Dell'Unto A, Massobrio M. History and Evolution of Hexapod External Fixators. In: Massobrio M, Mora R. (eds.) Hexapod External Fixator Systems. Springer, Cham. 2021. doi: 10.1007/978-3-030-40667-7_1
- Виленский В.А., Поздеев А.А., Зубаиров Т.Ф., Захарьян Е.А., Поздеев А.П. Лечение детей с деформациями длинных трубчатых костей нижних конечностей методом чрескостного остеосинтеза с использованием аппарата Орто-СУВ: анализ 213 случаев. Ортопедия, Травматология и Восстановительная Хирургия Детского Возраста. 2016;4(4):21-32. doi: 10.17816/PT0RS4421-32
- Solomin L.N. Hexapod External Fixators in Ankle and Foot Deformity Correction. In: Massobrio M, Mora R. (eds.) Hexapod External Fixator Systems. Springer, Cham, 2021. P. 153-197. doi: 10.1007/978-3-030-40667-7_9
- Singh P, Sabat D, Dutt S, Sehrawat R, Prashanth B, Vichitra A, Kumar V. Accuracy and Efficacy of Software-guided Bony Realignment in Periarticular Deformities of the Lower Limb. Strategies Trauma Limb Reconstr. 2021;16(2):65-70. doi: 10.5005/jp-journals-10080-1524
- Riganti S, Coppa V, Nasto LA, Di Stadio M, Calevo MG, Gigante AP, Boero S. Treatment of complex foot deformities with Hexapod external fixator in growing children and young adult patients. Foot Ankle Surg. 2019;25(5):623-629. doi: 10.1016/j.fas.2018.07.001
- Cherkashin A, Samchukov M, Iobst CA. Analysis of strut-to-bone lengthening ratio for Hexapod frames using mathematical modeling. J Limb Length. Reconstr. 2017;3(1):4-51. doi: 10.4103/jllr.jllr_29_16
- Herdiman L, Priadythama I, Susmartini S, Priyandari Y, Murdiyantara INSA, Apriani DH. Redesign of OrthoLPPDUNS External Fixation for Bone Reconstruction Using the Function Analysis System Technique (FAST) Method. Jurnal Ilmiah Teknik Industri. 2020;19(2):117-130. doi: 10.23917/jiti.v19i2.10732
- Cherkashin AM, Samchukov ML, Birkholts F. Treatment Strategies and Frame Configurations in the Management of Foot and Ankle Deformities. Clin Podiatr Med Surg. 2018;35(4):423-442. doi: 10.1016/j.cpm.2018.05.003
- Paley D, Robbins C. Hexapod External Fixators in the Treatment of Axial and Rotation Deformities and Limb Length Discrepancies. In: Hexapod External Fixator Systems. Springer, Cham, 2021. doi: 10.1007/978-3-030-40667-7_6.
- Рохоев С.А., Соломин Л.Н., Старчик Д.А., Демин А.С. Усовершенствование компоновок ортопедического гексапода Орто-СУВ, используемых для лечения пациентов c контрактурами коленного сустава (экспериментальное исследование). Современные проблемы науки и образования. 2022;(2). doi: 10.17513/spno.31521
- Pesenti S, Iobst CA, Launay F. Evaluation of the external fixator TrueLok Hexapod System for tibial deformity correction in children. Orthop Traumatol Surg Res. 2017;103 (5):761-764. doi: 10.1016/j.otsr.2017.03.015
- Mora R, Pedrotti L, Bertani B, Tuvo G, Maccabruni A. Problems, Challenge, Complications in Hexapod External Fixation Systems. Contraindications. In: Hexapod External Fixator Systems. Springer, Cham, 2021. doi:10.1007/978-3-030-40667-7_11
- Small Bone Hardware Quick Reference Guide. URL: https://www.orthopediatrics.com/products/orthex-small-bone-circular-fixator/ (дата обращения: 15.03.2023).
- Messner J, Chhina H, Davidson S, Abad J, Cooper A. Clinical outcomes in pediatric tibial lengthening and deformity correction: a comparison of the Taylor Spatial Frame with the Orthex Hexapod System. J Child Orthop. 2021;15(2):114-121. doi: 10.1302/1863-2548.15.200165
- Basha K, Alawadhi A, Alyammahi M, Sukeik M, Abdulhadi HS, Dsouza AP, Majid I, Alshryda S. Comparison of Three Circular Frames in Lower Limb Deformity Correction: A Biomechanical Study. Cureus. 2022;14(5):e25271. doi: 10.7759/cureus.25271
